LAMPIRAN A
HASIL PENGUKURAN PANEL SEL SURYA
1. Hasil Perbandingan Panel Surya Diam (Tanpa Pengarah) Dengan Panel
Surya Yang Bergerak (Pengarah)
Hasil analisis data arus listrik dan daya listrik yang dihasilkan oleh panel sel
surya diambil 1 sampel data pada pukul 08.00 WIB sebagai berikut :
a. Arus listrik c. Efesiensi Panel Surya Tanpa Pengarah (Statis)
��(%) = �������� � 100 %
d. Efesiensi Panel Surya Dengan Pengarah (Dinamis)
1. Pengukuran pada hari pertama
Daya Paling optimal di hari pertama pada pukul 13.00 yaitu 16,7 W Intensitas Rata-Rata Hari pertama 18742,73 LUX
2. Pengukuran Hari Kedua
Waktu
Daya Paling Optimal di hari kedua pada pukul 12.00 yaitu 19,46 W Intensitas rata-rata hari kedua 18293,55 LUX
22 Ω) (%)
Daya paling optimal di hari ketiga pada pukul 12.00 yaitu 20,76 W Intensitas rata-rata Hari ketiga 19235,09 LUX
10.00 11,2 0,51 5,71 16380 3,39 28 43
Daya paling optimal di hari keempat pada pukul 13.00 yaitu 17,91 W Intensitas Rata-rata Hari keempat 17019,64 LUX
14.00 14,8 0,67 9,92 19590 4,93 32,2 39
LAMPIRAN B
GAMBAR RANGKAIAN DAN ALAT
DAFTAR PUSTAKA
Agus K, 2011. Rancang Bangun Sistem Penjejak Matahari Untuk
Mengoptimalisasi Tegangan Sel Surya. Jurnal Teknik Elektro. Volume 3
Halaman 11-10. Bandung : Universitas Komputer Indonesia
Amar, M. 2012. Rancang Bangun Sistem Penjejak Matahari 2 Sumbu Berbasis
Kontrol Adative Neuro-Fuzzy Inference System (ANFIS). Jurnal Sains Dan
Semi Pomits. Volume 1 (1) Halaman 1-6. Surabaya : ITS
Aminudin, M. 2010. Desain Dan Realisasi Sistem Tracking Matahari Pada Solar
Panel Menggunakan Matriks Vision Sensor Dengan Resolusi Rendah,
Jurnal Teknik Telekomunikasi. Bandung : Universitas Telkom
Aprilina, P. 2005. Pengembangan Produk Keramik Berpori Dengan Proses
Ekstrusi Pada Skala Laboratorium. Jurnal Teknik Kimia Indonesia.Volume
4 (2) Halaman 227-233. Bandung : Institut Teknologi Bandung
Budiharto, Widodo,2007,”Proyek Sistem Akuisisi Data”, PT Elex Media
Komputindo, Jakarta.
Daryanto, 2010,“Teknik Mekatronika”,Penerbit : Satu Nusa,Bandung
Hendry, E. 2012. Perancangan Prototype Penjejak Cahaya Matahari Pada Aplikasi
Pembangkit Listrik Tenaga Surya. Jurnal Ilmiah Foristek. Volume 2 (2).
Bengkulu : Universitas Bengkulu
Karmon Sigalingging,1994 “Pembangkit Listrik Tenaga Surya”, Tarsito,
Bandung.
Rangkuti,Syahban,2011,”Mikrokontroller Atmel AVR”, Edisi Pertama. Penerbit :
Informatika,Jakarta
Uqud, A. 2014. Rancang Bangun Penjejak Matahari Untuk Panel Surya Pada
Sistem Teknologi HybridKonversi Energi Surya dan Angin. Jurnal Fisika.
Volume 2. Halaman 23-27. Surabaya : ITS
Wardhana,Lingga, 2006, “Belajar Sendiri Mikrokontroller AVR seri ATMEGA
Wasana, S. 2013. Rancang Bangun Solar Tracking System Untuk
Mengoptimalkan Penyerapa Energi Matahari Pada Solar Cell. Jurnal
Teknik. Volume 3 (1) Halaman 27-28. Depok : Universitas Indonesia
BAB 3
METODE PENELITIAN
3.1Diagram Blok Sistem Rangkaian
ARAH CAHAYA
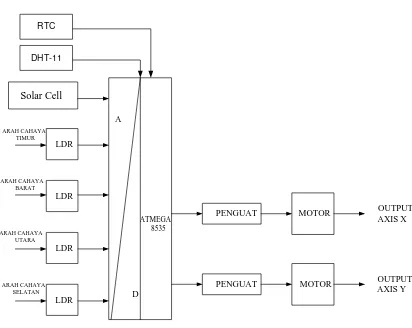
Gambar 3.1 Diagram Blok Rangkaian
Rancangan sistem dapat digambarkan berupa diagram blok di atas yaitu
konfigurasi sistem dan aliran input output sistem. Pada rancangan ini terdapat
input,proses,output dan display. Input sistem berasal dari kuat cahaya/intensitas
yang diperoleh dari matahari dan diubah menjadi besaran listrik oleh sensor dan
sel surya. Besaran yang diterima oleh 4 buah sensor digunakan untuk mengatur
arah panel ke arah dimana cahaya paling optimal. Dengan demikian data yang
diperoleh sensor diproses olek mikrokontroller dengan mendekati perbedaan
membuat mikrokontroller mengarahkan panel dengan menggerakkan motor ke
posisi yang paling tinggi intensitas cahaya nya. Dengan demikian output sistem
adalah prosees atau arah panel pada Axis X dan Axis Y. Output lain dari sistem
adalah energi yang dihasilan oleh panel berupa tegangan dan arus. Sedangkan
display menunjukkan besar tegangan yang diperoleh dari panel. Sensor
temperature eand Humidity DHT-11 berfungsi untuk menangkap atau
mendapatkan nilai Suhu dan kelembapan panel solar cell pada saat tersebut.
Modul RTC –pewaktu, dapat berfungsi sebagai jam, untuk membatasi pergerakan
solar tracker, pada saat malam hari , mikrokontroller akan mendapat nilai jam dari
modul RTC, pada saat malam hari, mikrokontroller akan berhenti menggerakkan
solar tracker untuk menghemat energi, jika sudah pagi hari atau matahari terbit,
maka mikrokontoller akan mulai menggerakkan panel surya lagi.
3.2Perancangan Sistem dan Realisasi Rangkaian
3.2.1 Sistem Hardware pada Alat Solar Tracking Dual Axis
Perancangan Hardware yaitu mekanis sistem penggerak/pengarah panel.
Dimana sistem dirancang dengan menggunakan 2 buah motor steper untuk Axis X
dan Y. Masing masing motor memiliki poros masing masing untuk menggerakkan
Axis. Dimana sebagai Rangka/penyangga dibuat dari bahan acliryc transparan.
Mekanik dirancang sedemikian rupa sehingga putaran motor akan menggerakkan
poros untuk memutar salah satu Axis. Untuk memperkuat torsi motor digunakan
gear plastik dengan perbandingan tertentu. Sehingga cukup kuat untuk
menggerakkan beban. Dua motor tersebut bekerja bersamaan untuk mencari arah
atau sudut yang paling optimal. Sensor diletakkan pada pusat atau titik tengah
panel karena titik tersebut paling optimal bagi sensor untuk mendeteksi titik fokus
atau arah sinar. Berikut adalah gambar foto nyata hasil rancangan mekani
pengarah panel.
3.2.2 Pengambilan Data Pergeseran Sudut Cahaya Matahari
Pengambilan data posisi/ sudut cahaya matahari sangat diperlukan. Hal ini
bertujuan untuk mengetahui seberapa besar pergeseran sudut cahaya matahari
Vin
R1
R2
Vout
18.00 WIB. Hasil yang diperoleh pada langkah ini digunakan untuk perhitungan
besar pergeseran arah panel sel surya dimana yang memiliki intensitas yang paling
tinggi.
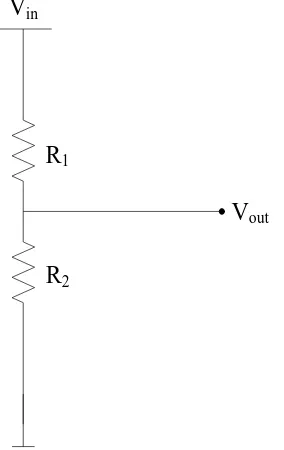
3.2.3 Rangkaian Pengkondisi Signal Panel Surya
Rangkaian pengkondisi Signal ini berfungsi untuk menurunkan tegangan
keluaran yang dihasilkan oleh panel surya agar dapat dibaca oleh mikrokontroller
karena maksimal masukan ADC mikrokontroller adalah 5 volt. Kemudian di
dalam mikrokontroller ini menggunakan tegangan referensi sebesar 5 volt atau di
bawahnya. Rangkaian pengkondisi Signal ditunjukkan pada gambar.
Gambar 3.2 Rangkaian Pengkonsisi Signal Panel Surya
Besar R1 dan R2 disesuaikan dengan tegangan maksimum dari sumber
tegangan yang diukur. Kemudian disesuaikan dengan tegangan masukan
maksimal dari ADC. Pada panel surya mempunyai Vout maksimal 10.000 Volt.
Dan pada mikrokontroller menguunakan tegangan referensi sebesar 5 Volt. Agar
dapat dibaca oleh mikrokotroller telah diset masukan yang masuk ke ADC tidak
Maka nilai R1= 10k dan R2= 5k jika di masukkan ke dalam persamaan adalah
sebagai berikut:
= 2
1+ 2
= 5000
10000 + 5000 10 = 3,3
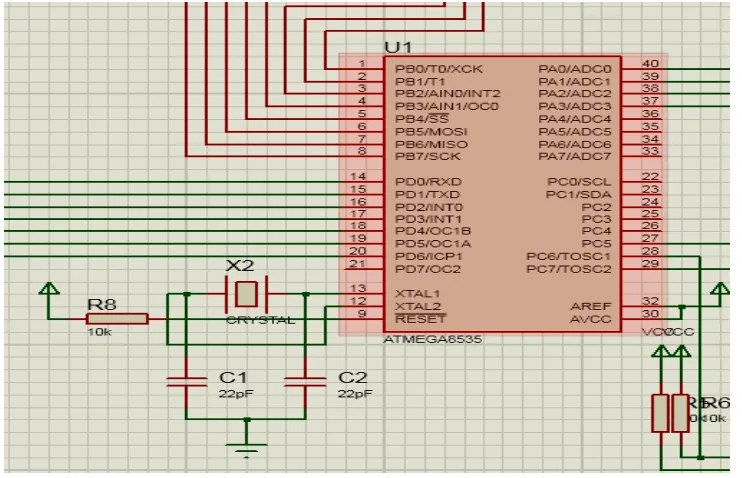
3.2.4 Rangkaian Mikrokontroller AVR ATMega 8535
Mikrokontroller ATMega 8535 merupakan mikrokontroller yang dirancang
singe chip sehingga perlu komponen tambahan sebagai pembangkit clock internal.
Komponen tersebut yaitu sebuah kristal 11,0592 MHz dan dua buah kapasior 22pf
sebagai pembangkit clock internal (on chip osilator) agar sistem dapat bekerja
dengan baik. Gambar 3.3 memperlihatkan rangkaian dari sistem minimum
mikrikontroller ATMega 8535 yang digunakan.
Gambar 3.3 Rangkaian Mikrokontroller ATMega 8535
Port I/O yang digunakan pada mikro ATMega 8535 adalah pada pin A.0, A.1,
A.2, A.3 dan A.4 yaitu masukan analog dari sensor. Masing-masing untuk Axis X
pada A.0 dan A.1. Sedangkan Axis Y pada A.2 dan A.3. Untuk A.4 adalah
masukan dari tegangan panel.
Output mikrokontroller diprogram pada port B, yaitu untuk menggerakkan
12 Volt
Motor Stepper
BD 139 Mikrokontroller
3.2.5 Subroutin Pengaturan Motor Steper
Motor steper dalam sistem berfungsi sebagai penggerak mekais dimana motor
steper merupakan sejenis motor DC yang digerakkan secara langkah demi
langkah. Motor steper dikendalikan oleh driver yaitu penguat arus. Jenis motor
steper yang digunakan adalah motor steper 4 fasa unipolar tipe magnet per magnet
dengan demikian motor memiliki 4 komponen untuk diberi arus agar motor dapat
digerakkan. Pemberian arus pada tiap kumparan secara beraturan akan
menyebabkan motor berputar. Putaran motor yang digunakan untuk
menggerakkan mekanik pengarah panel. Rancangan ini menggunakan 2 buah
motor untuk masing-masing Axis. Output motor dihubungkan dengan porors
melalui beberapa gear yang bertujuan memperkuat torsi putaran motor. Resolusi
putaran motor yang digunakan dalam rancangan ini adalah 1,8o/step. Sehingga
untuk mendapat 1 putaran dibutuhkan 200 step. Motor dikendalikan oleh
mikrokontroller melalui penguat transistor.
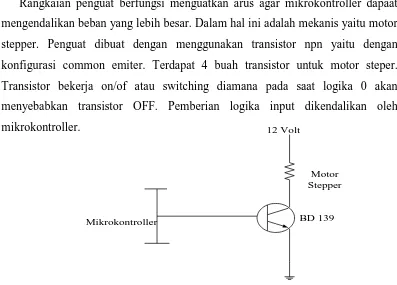
3.2.6 Rangkaian Penguat Arus/Driver
Rangkaian penguat berfungsi menguatkan arus agar mikrokontroller dapaat
mengendalikan beban yang lebih besar. Dalam hal ini adalah mekanis yaitu motor
stepper. Penguat dibuat dengan menggunakan transistor npn yaitu dengan
konfigurasi common emiter. Terdapat 4 buah transistor untuk motor steper.
Transistor bekerja on/of atau switching diamana pada saat logika 0 akan
menyebabkan transistor OFF. Pemberian logika input dikendalikan oleh
mikrokontroller.
3.2.7 Rangkaian Sensor DHT-11
Rangkaian sensor Suhu dan kelembapan menggunakan sensor DHT-11, sensor
ini telah terintegrasi dalam 1 modul sehingga hanya perlu diberi supply saja tanpa
perlu rangkaian tambahan lagi. Untuk berkomunikasi dengan mikrokontroller,
sensor DHT cukup dihubungkan dengan 1 pin mikrokontroller dan menggunakan
komunikasi 1-wire.
Gambar 3.5 Rangkaian Sensor DHT
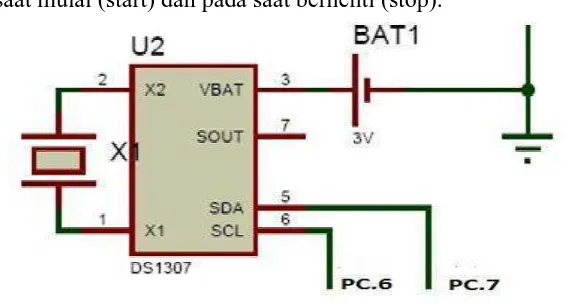
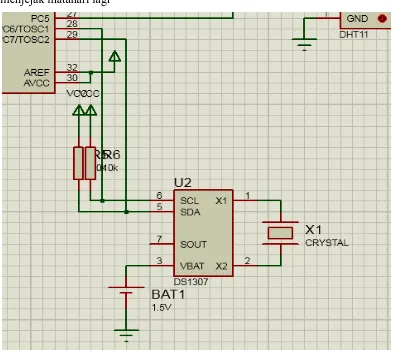
3.2.8 Perancangan Sistem RTC DS 1307
RTC adalah jenis pewaktu yang bekerja berdasarkan waktu yang sebenarnya
atau dengan kata lain berdasarkan waktu yang ada pada jam kita. Agar dapat
berfungsi, pewaktu ini membutuhkan dua parameter utama yang harus ditentukan,
yaitu pada saat mulai (start) dan pada saat berhenti (stop).
RTC digunakan untuk mengaktifkan dan menonaktifkan system. Kerja system
berpatokan pada nilai waktu yang diberikan oleh RTC. Pada saat pagi hari,saat
matahari sudah terbit pada kira-kira jam 6 sesuai dengan nilai yang diberikan oleh
RTC, maka system akan mulai aktif dan menjejak matahari, sedangkan jika RTC
memberikan nilai waktu setengah 7 ke sistem, maka system akan off dan tidak
menjejak matahari lagi
Gambar 3.7 Rangkaian Aplikasi Modul RTC DS1307 Yang Dihubungkan Ke
3.3 Flowchart
ke Arah Selatan Baca Tegangan
BAB 4
HASIL DAN PEMBAHASAN
Bab ini berisi implementasi perancangan sistem dari hasil analisis dan
perancangan yang sudah dibuat, serta menguji sistem untuk menemukan
kelebihan dan kekurangan pada sistem yang dibuat.
4.1Implementasi Sistem
4.1.1 Implementasi Hardware Pada Sistem
Untuk keperluan antarmuka suatu komponen elektronik degan mikrokontroler,
perlu diketahui fungsi dari setiap kaki yang ada pada komponen tersebut.
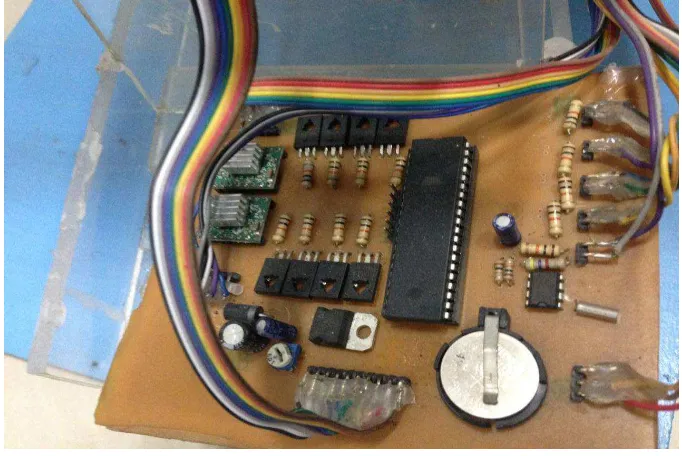
Implementasi sistem perangkat keras ini digunakan papan PCB sebagai tempat
peletakan komponen dan jalur rangkaian sistem,dalam membuat rangkaian PCB
yang digunakan adalah software eagle. Adapun hasil implementasi rangkaian dan
tata letak komponen pada papan PCB adalah pada gambar dibawah :
Setelah komponen-komponen yang diperlukan telah te rsedia dan layout board
telah di transfer ke papan PCB, maka keseluruhan sistem yang akan dibangun
dirangkai di papan PCB. Setelah system dirangkai diatas papan PCB, maka
dilakukan pengujian komponen-komponen utama pada system dan pengujian
keseluruhan system.
4.1.2 Implementasi Perangkat Lunak Untuk Sistem
Perangkat lunak yang dibuat ini akan menjalankan fungsi-fungsi perangkat
keras yang telah dirangkai. Perangkat lunak ini dibuat dengan menggunakan
bahasa C dan kompiler ISP Programmer yang khusus digunakan untuk
mengkompile program-program dalam bahasa C yang dibuat untuk menjalankan
mikrokontroler dari keluarga AVR. Perangkat lunak ini sendiri terdiri atas
beberapa modul program yang lebih khusus dan spesifik untuk hardware atau
komponen tertentu.
Gambar 4.2 Tampilan Awal Editor Dan Compiler CodeVision AVR
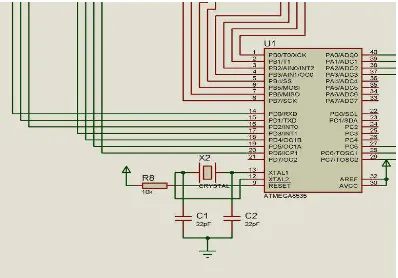
4.2Pengujian Rangkaian Mikrokontroller ATMega8535
Pengujian pada sistem dilakukan pengecekan operasional terhadap fungsi
bagian-bagian sistem. Pengujian rangkaian Mikrokontroler dapat dilakukan
dengan cara menghubungkan rangkaian sistem minimum dengan sumber tegangan
5 V. Dimana pin 10 Mikrokontroler dihubungkan dengan tegangan 5 volt dan pin
Gambar 4.3 Rangkaian Pengujian Mikrokontroler
Kemudian pin 12 dan pin 11 dihubungkan ke XTAL dan dua buah kapasitor.
XTAL ini akan mempengaruhi kecepatan mikrokontroller ATMega8535 dalam
mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset
(aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroller
tersebut.
Sistem mikrokontroller merupakan sistem pengendali semua rangkaian yang
ada pada sistem. Sistem minimum mikrokontroller agar berhubungan dengan
sensor LDR untuk mendeteksi adanya perbedaan posisi intensitas cahaya
matahari, menerima data dari sensor DHT11, serta mengendalikan motor stepper
dan menampilkan tampilan LCD sebagai output, sSbuah program sederhana
diisikan kedalam mikrokontroller.
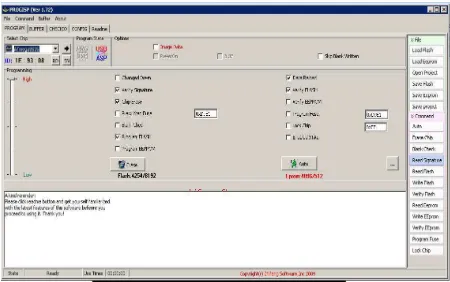
Karena pemrograman menggunakan mode ISP (In System Programming)
mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan
rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada
pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh
Gambar 4.4 Informasi Signature Mikrokontroler
Apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat,
bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode
ISP-nya. Secara elektronis rangkaian system minimum sudah bekerja dengan baik,
system minimum dari mikrokontroller dapat direspon / dikenali oleh programmer
downloader dan tegangan input pada kaki vcc berkisar 5 Volt
4.3Pengujian LDR Pada Panel Surya
Pengujian ini untuk mengetahui unjuk kerja dari rangkaian LDR yang telah
dibuat sesuai dengan perencanaan atau belum. Panel surya yang digunakan
mempunyai dimensi panjang 35 cm dan lebar 50 cm, LDR dissusun/diletakkan
pada bagian tengah panel surya dan jarak antara LDR adalah 10 cm serta sudut
yang dibentuk LDR terhadap garis normal adalah nol seperti yang ditunjukkan
oleh Gambar 4.5. Peletakan sensor LDR ini pada panel surya bertujuan untuk
Gambar 4.5 Posisi Penyusunan Sensor LDR Pada Panel Surya
Hasil pengujian dimulai dengan pengujian solar tracker dengan metoda solar
tracker diletakkan didalam ruangan. Metoda solar tracker diletakkan dalam
ruangan dengan cara memakai senter dan menembakkan cahaya senter tersebut ke
empat buah LDR. Pergerakan senter hanya memakai tangan penguji yang
bertujuan membandingkan intensitas cahaya yang diterima oleh LDR.
Tujuan dari pengujian ini adalah untuk mengetahui apakah LDR dapat
mendeteksi perbedaan sudut datangnya sumber cahaya Untuk menguji hal
tersebut, solar tracker diletakkan dalam ruangan. Pengujian dilakukan dengan
memakai senter yang cahayanya ditembakkan ke panel surya dengan sudut secara
bergantian. Bila cahaya senter ditembakkan kearah salah satu LDR maka LDR
yang menerima cahaya senter terbesar akan menampilkan nilai yang paling besar.
Untuk mengetahui nilai hasil pembacaan dari LDR, sensor LDR dihubungkan
dengan ADC Atmega dan ditampilkan pada LCD dengan rangkaian seperti
dibawah ini.
Gambar 4.6 Rangkaian Pengujian LDR Dan Mikrokontroller
Panel Surya
LDR LDR
LDR
Rangkaian diatas kemudian diisikan program untuk membaca nilai LDR dan
menampilkan nya di LCD Hasil pengujian dapat dilihat pada Tabel 4.1.
No Arah Cahaya Senter
Nilai Pembacaan ADC LDR Oleh Mikrokontroller
Tabel 4.1. Perbandingan Pembacaan LDR Oleh Mikrokontroller
Dari data tabel diatas, didapatkan kesimpulan bahwa perbedaan sudut
penyinaran sumber cahaya,dalam hal ini senter, mempengaruhi pembacaan dari
sensor LDR, nilai LDR yang tertera merupakan hasil pembacaan dari ADC
AtMega.
4.4Pengujian Motor Stepper dan Driver
Motor stepper yang digunakan dalam penelitian ini dalan motor stepper
unipolar dengan 4 jalur data dan satu jalur common. Stepper ini bekerja dengan
baik pada arus 500 mA dan tegangan 12 V. Transistor BD139 digunakan sebagai
perantara antara mikrokontroler dengan motor stepper. Motor sepper dapat
digerakkan dengan cara memberikan pulsa-pulsa pada datanya sebagai berikut:
Gambar 4.7 Pulsa Yang Diberikan Untuk Menggerakkan Motor Stepper
Pulsa ini dapat mengerakkan motor stepper sebanyak 1 siklus (4 step). Dengan
mengikuti keterangan diatas kita depat membuat program dari mikrokontroler
untuk menggerakkan motor stepper:
for (i=0;i<50;i++){
PORTB = 0x10;delay_ms(25);
PORTB = 0x20;delay_ms(25);
PORTB = 0x40;delay_ms(25);
PORTB = 0x80;delay_ms(25); }
Motor stepper yang digunakan dalam penelitian ini dalan motor stepper
unipolar dengan 4 jalur data dan satu jalur common. Stepper ini bekerja dengan
baik pada arus 500 mA dan tegangan 12 V. Transistor BD139 digunakan sebagai
perantara antara mikrokontroler dengan motor stepper. Motor sepper dapat
digerakkan dengan cara memberikan pulsa-pulsa pada datanya sebagai berikut:
Program ini akan menggerakkan stepper sebesar 90 derajat searah jarum jam.
Dimana motor stepper dihubungkan melalui port-port mikrokontroller, dan
program mikrokontroller diisikan dengan akumulator yang secara bertahap
nilainya di geser kearah kiri.
Perintah “for (i=0;i<50;i++)“ digunakan untuk membatasi jumlah step
pergeseran motor stepper. Dalam hal ini dibatasi sebanyak 50 kali. Artinya pada
program ini motor stepper diputar sebanyak 50 step. Dalam satu step motor
stepper ini dapat berputar sebesar 1,8 derajat. Dengan demikian pada program
motor stepper berputar sebesar 50 x 1,8 = 90 derajat
Kecepatan putaran motor stepper pada program ditentukan oleh delay,
semakin cepat delay maka perputarannya semakin cepat pula. Karena pada
program delay yang dipakai adalah 0,025 detik, maka lamanya waktu yang
dibutuhkan untuk memutar stepper sebesar 90 derajat adalah 50 x 0,025 detik =
1,25 detik.
Pada penelitian ini motor stepper 1 digunakan untuk memutar panel surya
secara horizontal dan motor stepper 2 untuk memutar panel surya secara vertikal.
motor stepper dihubungkan melalui gear kedua yang menempel pada panel surya.
Perbandingan keliling gear motor stepper dan gear kedua dibuat 1 : 3, kedua tepi
gir ini dibuat bersinggungan, maka perbandingan perputaran sudut untuk motor
stepper dengan gear kedua adalah 3 : 1. Artinya untuk 3 derajaT perputaran
stepper mampu memutar 1 derajat gear kedua.
4.5Pengujian Rangkaian RTC DS-1307
Pengujian rangkaian RTC DS-1307 dilakukan dengan memberi perintah
pengambilan data dari RTC DS-1307 dengan komunikasi jalur data I2C melalui
mikrokontroller. Berikut adalah listing programnya
#include <mega8535.h>
// DS1307 Real Time Clock initialization
// Square wave output on pin SQW/OUT: Off
// SQW/OUT pin state: 0
rtc_init(0,0,0);
rtc_set_time(12,30,00); //fungsi untuk melakukan setting pada RTC DS-1307 pertama
kali
{
4.6Pengujian rangkaian Sensor DHT11
Pada penelitian ini, sensor DHT11 digunakan untuk mengukur Suhu dan
kelembapan pada panel surya. Sensor DHT11 menggunakan protokol 1-wire,
cukup menggunakan 1 kabel untuk pertukaran data dengan mikrokontroller.
Proses pertukaran data antara modul mikrokontroler dengan sensor DHT11
dilakukan secara serial half-duplex menggunakan satu jalur data. Data Suhu dan
kelembaban dari DHT11 akan diproses terlebih dahulu oleh modul mikrokontroler
kemudian ditampilkan kepada pengguna dalam bentuk celcius (suhu) dan
persentase (kelembaban). Pengujian sensor DHT11 dengan cara menghubungkan
sensor dengan mikrokontroller AtMega dan LCD sebagai penampil output.
Kemudian mikrokontroller diisikan program untuk menampilkan hasil proses
pengukuran sensor di LCD.
Tabel 4.2 Hasil Pengujian Sensor DHT11
Dari hasil pengujian dapat disimpulkan bahwa pengukuran dari sensor DHT11
tidak terlalu jauh dari nilai aktual/sebenarnya dengan rata persentase error sekitar
4.7Data Hasil Pengamatan
Pengujian dilakukan dengan mengukur panel surya mulai dari pagi pukul
08.00 WIB hingga sore pukul 18.00 WIB dengan interval waktu 1 jam selama 5
hari dimulai dari tanggal 17-21 Januari 2017. Perlakuan panel surya yaitu tanpa
pengarah (diam) dan dengan pengarah. Analisis data yang diukur oleh panel surya
diam dan dengan pengarah yaitu arus listrik, tegangan listrik dengan beban 22 Ω,
daya listrik serta Suhu dan kelembaban.
4.7.1 Data Hasil Pengamatan Daya Panel Surya Statis (Tanpa Pengarah)
dan Dinamis (Pengarah)
. Grafik hubungan Daya terhadap waktu pada hari pertama ditunjukkan pada
Grafik 4.1 sebagai berikut :
Grafik 4.1 Grafik Hubungan Daya Terhadap Waktu Pada Hari Pertama
Grafik 4.1 diatas menunjukkan bahwa besar Daya optimum yang dihasilkan
oleh panel surya diam dengan beban 22 Ω pada hari pertama yaitu pada pukul
13.00 WIB Sebesar 16,5 W untuk panel statis dan 16,7 W untuk Panel Dinamis. 0
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Sistem Penjejak Dual Axis ini bekerja optimal pada saat Pagi dan Sore hari.
Sedangkan Pada siang hari Arus yang dihasilkan Pada Solar Tracker Statis dan
Dinamis tidaklah jauh berbeda (cenderung sama) dikarenakan posisi Matarahi
Tegak lurus pada siang hari.
. Grafik hubungan Daya terhadap waktu pada hari kedua ditunjukkan pada
Grafik 4.2 sebagai berikut :
Grafik 4.2 Hubungan Daya Terhadap Waktu Pada Hari Kedua
Grafik 4.2 diatas menunjukkan bahwa besar Daya optimum yang dihasilkan
oleh panel surya diam dengan beban 22 Ω pada hari Kedua yaitu Sebesar 19,46 W
untuk panel statis dan Dinamis. Sistem Penjejak Dual Axis ini bekerja optimal
pada saat Pagi dan Sore hari. Sedangkan Pada siang hari Arus yang dihasilkan
Pada Solar Tracker Statis dan Dinamis tidaklah jauh berbeda (cenderung sama)
dikarenakan posisi Matarahi Tegak lurus pada siang hari. 0
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
. Grafik hubungan Daya terhadap waktu pada hari ketiga ditunjukkan pada
Grafik 4.3 sebagai berikut :
Grafik 4.3 Hubungan Daya Terhadap Waktu Pada Hari Ketiga
Grafik 4.3 diatas menunjukkan bahwa besar Daya optimum yang dihasilkan
oleh panel surya diam dengan beban 22 Ω pada hari Ketga yaitu Sebesar 19,46 W
untuk panel statis dan Dinamis. Sistem Penjejak Dual Axis ini bekerja optimal
pada saat Pagi dan Sore hari. Sedangkan Pada siang hari Arus yang dihasilkan
Pada Solar Tracker Statis dan Dinamis tidaklah jauh berbeda (cenderung sama)
dikarenakan posisi Matarahi Tegak lurus pada siang hari.
Grafik hubungan Daya terhadap waktu pada hari keempat ditunjukkan pada
Grafik 4.4 sebagai berikut
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Grafik 4.4 Hubungan Daya Terhadap Waktu Pada Hari Keempat
Grafik hubungan Daya terhadap waktu pada hari keempat ditunjukkan pada
Grafik 4.5 sebagai berikut
Grafik 4.5 Hubungan Daya Terhadap Waktu Pada Hari Kelima 0
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
D
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
4.7.2 Data Hasil Pengamatan Pengaruh Intensitas Cahaya dan Daya
terhadap Waktu
Grafik hubungan Intensitas Cahaya dan Daya terhadap waktu pada hari
pertama ditunjukkan pada Grafik 4.6 sebagai berikut :
Grafik 4.6 Hubungan Intensitas Cahaya dan Daya Terhadap Waktu Pada Hari
Pertama
Grafik hubungan Intensitas Cahaya dan Daya terhadap waktu pada hari pertama
ditunjukkan pada Grafik 4.7 sebagai berikut :
Grafik 4.7 Hubungan Intensitas Cahaya dan Daya Terhadap Waktu Pada Hari
Kedua
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Daya (mW)
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Daya (mW)
Intensitas (Lux)
26260 Lux
Grafik hubungan Intensitas Cahaya dan Daya terhadap waktu pada hari
pertama ditunjukkan pada Grafik 4.8 sebagai berikut :
Grafik 4.8 Hubungan Intensitas Cahaya dan Daya Terhadap Waktu Pada Hari
Ketiga
Grafik hubungan Intensitas Cahaya dan Daya terhadap waktu pada hari
pertama ditunjukkan pada Grafik 4.9 sebagai berikut :
Grafik 4.9 Hubungan Intensitas Cahaya dan Daya Terhadap Waktu Pada Hari
Keempat
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Daya (mW)
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00
Daya (mW)
Intensitas (Lux)
24860 Lux
Grafik hubungan Intensitas Cahaya dan Daya terhadap waktu pada hari
pertama ditunjukkan pada Grafik 4.10 sebagai berikut :
Grafik 4.10 Hubungan Intensitas Cahaya dan Daya Terhadap Waktu Pada Hari
Kelima 0
5000 10000 15000 20000 25000 30000
08.00 09.00 10.00 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00 Daya (mW)
Intensitas (Lux)
23970 Lux
4.8Perbandingan Data Hasil Pengamatan
Dapat diperoleh besarnya daya optimum yang dihasilkan dari penyerapan
cahaya matahari oleh panel surya dimana hasil pengukuran dari panel surya yang
diam (tanpa pengarah) dengan panel surya yang bergerak (pengarah) yang
diperoleh dari hasil perhitungan rata-rata yang ditunjukkan pada Tabel 4.3
dibawah ini :
Panel Sel
Surya
I (A) Vout (Beban 22 Ω) P (Watt) T(oC) RH
(%)
Diam 0,65 14,35 10,11 29,75 41,55
bergerak 0,72 15,86 11,97
31,14 41,00
Tabel 4.3 Perbandingan Hasil Pengujian I, V, P, Suhu dan
Kelembaban-Vs-Waktu Yang Terukur Oleh Kedua Panel Sel Surya
Tabel 4.3 menunjukkan besar daya listrik terukur yang dihasilkan panel sel
surya yang bergerak lebih besar daripada yang diam ini dikarenakan panel sel
surya yang bergerak lebih optimum menyerap cahaya matahari sebab panel surya
bergerak mengikuti arah posisi pancaran cahaya matahari.
Sehingga Pertambahan Energi yang diperoleh dari panel surya yaitu
dirumuskan sebagai berikut :
� = � − �
= ( � � − � � � )− ( � � � � � )
= 119,7 � 11 � − 111,21 � 11 �
= 131,67−101,53
BAB 5
KESIMPULAN
5.1Kesimpulan
1. Telah dirancang sebuah alat penjejak matahari (solar tracker) dual axis
dengan menggunakan sensor LDR dengan mengikuti arah gerak posisi
matahari. Hasil pengukuran diperoleh bahwa daya listrik rata-rata yang
dihasilkan oleh panel surya bergerak (pengarah) yaitu sebesar 10,92 Watt.
2. Pada penelitian diperoleh bahwa panel surya bergerak menghasilkan arus
listrik rata-rata sebesar 0,72 A dan tegangan rata-rata sebesar 15,86 V.
Sedangkan panel surya diam (tanpa pengarah) hanya menghasilkan arus
rata-rata 0,65 A dan tegangan rata-rata-rata-rata 14,35 V. Sehingga panel surya bergerak
lebih efektif dibandingkan dengan panel surya diam dengan nilai efisiensi
energi yang dihasilkan yaitu 5,89%
3. Dalam penelitian diperoleh bahwa suhu dan kelembaban sangat berpengaruh
pada besarnya daya yang dihasilkan. Dimana Suhu berbanding lurus dengan
daya listrik yang dihasilkan dan berbanding terbalik dengan kelembaban.
Selain itu, suhu dan kelembaban dipengaruhi oleh besar intensitas cahaya
matahari yang diserap oleh panel surya. Hasil yang diperoleh yaitu suhu dan
kelembaban optimum untuk panel surya diam (tanpa pengarah) yaitu Suhu
rata-rata 29,75oC dan kelembaban 41,55%. Sedangkan panel surya bergerak
rata-rata 31,14o C dan kelembaban 41%
5.2 Saran
1. Sebaiknya Motor Steper diganti dengan Motor Nema 16 atau 17 agar
pergerakan Panel Surya lebih stabil.
2. Sebaiknya sumbu ditambah menjadi 3 Sumbu, agar penyerapan panel surya
BAB 2
TINJAUAN PUSTAKA
2.1Panel Surya
Energi merupakan salah satu masalah utama yang dihadapi oleh hampir
seluruh negara di dunia. Hal ini mengingat energi merupakan salah satu faktor
utama bagi terjadinya pertumbuhan ekonomi suatu negara. Permasalahan energi
menjadi semakin kompleks ketika kebutuhan yang meningkat akan energi dari
seluruh negara di dunia untuk menopang pertumbuhan ekonominya justru
membuat persediaan cadangan energi konvensional menjadi semakin sedikit.
Saat ini total kebutuhan energi di seluruh dunia mencapai 10 Terra Watt
(setara dengan 3 x 1020 Joule/ tahun). Kebutuhan yang meningkat terhadap energi
juga pada kenyataanya bertabrakan dengan kebutuhan umat manusia untuk
menciptakan lingkungan yang bersih dan bebas dari polusi. Berbagai masalah ini
menuntut perlunya dikembangkan sumber energi alternatif yang dapat menjawab
tantangan di atas tersebut.
Solar cell merupakan sebuah hamparan semi konduktor yang dapat menyerap
photon dari sinar matahari dan mengubahnya menjadi listrik. Sel surya tersebut
dari potongan silikon yang sangat kecil dengan dilapisi bahan kimia khusus untuk
membentuk dasar dari sel surya. Sel surya pada umumnya memiliki ketebalan
minimum 0,3 mm yang terbuat dari irisan bahan semikonduktor dengan kutub
positif dan negatif. Pada sel surya terdapat sambungan (function) antara dua
lapisan tipis yang terbuat dari bahan semikonduktor yang masing - masing yang
diketahui sebagai semikonduktor jenis “P” (positif) dan semikonduktor jenis “N”
(Negatif). Silikon jenis P merupakan lapisan permukaan yang dibuat sangat tipis
supaya cahaya matahari dapat menembus langsung mencapai junction. Bagian P
ini diberi lapisan nikel yang berbentuk cincin, sebagai terminal keluaran positif .
Dibawah bagian P terdapat bagian jenis N yang dilapisi dengan nikel juga sebagai
Solar cell merupakan pembangkit listrik yang mampu mengkonversi sinar
matahari menjadi arus listrik. Energi matahari sesungguhnya merupakan sumber
energi yang paling menjanjikan mengingat sifatnya yang berkelanjutan
(sustainable) serta jumlahnya yang sangat besar. Matahari merupakan sumber
energi yang diharapkan dapat mengatasi permasalahan kebutuhan energi masa
depan setelah berbagai sumber energi konvensional berkurang jumlahnya serta
tidak ramah terhadap lingkungan.
Pada solar cell dibutuhkan material yang dapat menangkap matahari, dan
energi tersebut digunakan untuk memberikan energi keelektron agar dapat
berpindah melewati band gapnya ke pita konduksi, dan kemudian dapat berpindah
ke rangkaian luar. Melaui proses tersebutlah arus listrik dapat mengalir dari solar
cell. Umumnya devais dari solar cell ini menggunakan prinsip PN junction.
Energi yang dikeluarkan oleh sinar matahari sebenarnya hanya diterima oleh
permukaan bumi sebesar 69% dari total energi yang dipancarkan matahari. Suplai
energi surya dari sinar matahari yang diterima oleh permukaan bumi sangat luar
biasa besarnya yaitu mencapai 0,5 miliar energi matahari atau kira-kira 1,3 x 1017
Watt (Karmon Sigalingging, 1994).
Melihat energi yang dikeluarkan dari pancaran matahari yang begitu besar,
pemanfaatan energi matahari menjadi salah satu daya tarik tersendiri untuk
dilakukan. Salah satu pemanfaatan energi matahari adalah penggunaan sel surya
yang berfungsi mengubah energi matahari menjadi energi listrik. Dalam proses
konversi energi pada sel surya dipengaruhi banyak faktor yang dapat mengurangi
optimalisasi pada proses konversi energi. Diantaranya adalah faktor orientasi
terhadap matahari yang selalu berubah-ubah dapat mengurangi optimalisasi sel
surya dalam proses konversi energi matahari menjadi energi listrik. Sel surya akan
menghasilkan daya maksimal ketika posisinya saling tegak lurus dengan cahaya
matahari.(Karmon Sigalingging, 1994).
Faktor dari pengoperasian sel surya agar didapatkan nilai yang maksimum
sangat tergantung pada beberapa hal, antara lain.
a. Suhu sel surya
Sebuah sel surya dapat beroperasi secara maksimum jika Suhu sel tetap
akan melemahkan tegangan (Voc). Gambar 2.1 menunjukkan setiap kenaikan
Suhu sel surya 10 º Celsius (dari 25º) akan berkurang sekitar 0,4 % pada total
tenaga yang dihasilkan atau akan melemah dua kali (2x) lipat untuk kenaikan
Suhu sel per 10º C.
Gambar 2.1. Karakteristik Suhu sel surya terhadap tegangan keluaran (Eduardo
Lorenzo, 1994)
b. Radiasi matahari
Radiasi matahari di bumi dan berbagai lokasi bervariasi dan sangat
tergantung keadaan spektrum matahari ke bumi. Pengaruh intensitas matahari
memiliki pengaruh yang besar terhadap arus (I) sebagaimana diperlihatkan pada
Gambar 2.2
Gambar 2.2 Pengaruh intensitas matahari pada nilai arus dan tegangan(Eduardo
Lorenzo, 1994)
c. Kecepatan angin bertiup
Kecepatan tiupan angin disekitar lokasi sel surya dapat membantu
d. Keadaan atmosfir bumi
Keadaan atmosfir bumi seperti berawan, mendung, jenis partikel debu udara,
asap, uap air udara (Rh), kabut dan polusi sangat menentukan hasil maksimum
arus listrik dari sel surya.
e. Orientasi sel surya
Orientasi dari rangkaian sel surya ke arah matahari secara optimum adalah
penting agar sel surya dapat menghasilkan energi maksimum. Selain arah
orientasi, sudut orientasi dari sel surya juga sangat mempengaruhi hasil energi
maksimum. Sebagai contoh, untuk lokasi yang terletak di belahan utara latitude,
maka panel atau deretan sel surya sebaiknya diorientasikan ke Selatan, orientasi
ke timur-barat walaupun juga dapat menghasilkan sejumlah energi dari
panel-panel sel surya, tetapi tidak akan mendapatkan energi matahari optimum.
f. Posisi letak sel surya terhadap matahari (tilt angle)
Sel surya pada Equator (latitude 0o) yang diletakkan mendatar (tilt angle = 0)
akan menghasilkan energi maksimum, sedangkan untuk lokasi dengan latitude
berbeda harus dicarikan “tilt angle” yang berbeda. Dengan mempertahankan sinar
matahari jatuh ke sebuah permukaan sel surya secara tegak lurus akan
menghasilkan energi maksimum ± 1000 W/m2 atau 1 kW/m2. Kalau tidak dapat
mempertahankan ketegaklurusan antara sinar matahari dengan sel surya, maka
energi yang didapatkan akan tidak maksimal.
2.2 Sensor LDR (Light Dependent Resistor)
Sensor adalah alat yang digunakan untuk mendeteksi dan mengetahui
magnitude tertentu. Sensor merupakan jenis transduser yang digunakan
untuk mengubah variasi mekanis, magnetis,panas,sinar dan kimia menjadi
tegangan dan arus listrik. Sensor memegang peranan penting dalam
mengendalikan proses pabrikasi modern. (Petruzella, 2001 : 157) .
Sensor yang sering digunakan dalam berbagai rangkaian elektronik salah
satunya adalah sensor cahaya (LDR). Sensor cahaya adalah alat yang
besaran cahaya menjadi besaran listrik. Sensor cahaya LDR (Light
Dependent Resistor) merupakan suatu jenis resistor yang peka terhadap
cahaya. Nilai resistansi LDR akan berubah-ubah sesuai dengan intensitas cahaya
yang diterima. Jika LDR tidak terkena cahaya maka nilai tahanan akan
menjadi besar (sekitar 10MΩ) dan jika terkena cahaya nilai tahanan akan
menjadi kecil (sekitar 1kΩ). (Novianty,Lubis,& Tony, 2012 : 1).
Cara kerja dari sensor ini adalah mengubah energi dari foton menjadi
elektron, umumnya satu foton dapat membangkitkan satu elektron. Sensor
ini mempunyai kegunaan yang sangat luas salah satu yaitu sebagai pendeteksi
cahaya pada tirai otomatis. Beberapa komponen yang biasanya digunakan
dalam rangkaian sensor cahaya adalah LDR (Light Dependent Resistor),
Photodiode, dan Photo Transistor.
Gambar 2.3 Sensor cahaya (LDR)
(sumber : http://komponenelektronika.biz/sensor-cahaya.html)
Salah satu komponen yang menggunakan sensor adalah LDR (Light
Dependent Resistor), adalah suatu komponen elektronika yang memiliki
hambatan yang dapat berubah sesuai perubahan intensitas cahaya, resistensi dari
LDR akan menurun jika ada penambahan intensitas cahaya yangmengenainya.
Pada dasarnya komponen ini merupakan suatu resistor yang memiliki nilai
hambatan bergantung pada jumlah cahaya yang jatuh pada permukaan sensor
tersebut. LDR dapat dibuat dari semikonduktor beresistensi tinggi yang tidak
dilindungi dari cahaya. Jika cahaya yang mengenainya memiliki frekuensi yang
cukup tinggi, foton yang diserap oleh semikonduktor akan menyebabkan
elektron memiliki energi yang cukup untuk meloncat ke pita konduksi. Elektron
bebas yangdihasilkan dan pasangan lubangnya akan mengalirkan listrik,
sehingga menurunkan resistansinya.
Transistor , secara sederhana adalah sebuah transistor bipolar yang memakai
kontak(junction)base-collector yang menjadi permukaan agardapat menerima
cahaya sehingga dapat digunakan menjadi konduktivitas transistor. Secara lebih
detail PhotoTransistor merupakan sebuah benda padat pendeteksi cahaya yang
memiliki gain internal. Hal ini yang membuat foto transistor memiliki sensivitas
yang lebih tinggi dibandingkan photodiode / foto diode, dalam ukuran yang sama.
Alat ini dapat menghasilkan sinyal analog maupun sinyal digital. Photo
Transistor sejenis dengan transistor pada umumnya,bedanya pada Photo
Transistor dipasang sebuah lensa pemfokus sinar pada kaki basis untuk
memfokuskan sinar jatuh pada pertemuan PN.(sumber: komponenelektronika.biz)
2.3 Mikrokontroler
Mikrokontroler adalah mikrokomputer chip-tunggal yang dirancang secara
spesifik untuk aplikasi-aplikasi kontrol dan bukan untuk aplikasi-aplikasi
serbaguna. Aplikasi-aplikasi yang tipikal meliputi kontrol perangkat
perangkat-perangkat peripheral seperti motor, penggerak, printer, dan komponen-komponen
subsistem minor.(Tooley, 2003)
Mikrokontroller sesuai dengan namanya adalah suatu alat atau komponen
pengontrol atau pengendali yang berukuran mikro atau kecil. Bila dibandingkan
dengan mikroprosesor, mikrokontroller jauh lebih unggul kerena terdapat berbagai
alasan diantaranya :
1. Tersedianya Input/Outout
I/O dalam mikrokontroller sudah tersedia, sementara pada mikroprosesor
dibutuhkan IC tambahan untuk menangani I/O tersebut, IC yang dimaksud
adalah PPI 8255.
2. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga
mutlak harus ada. Mikroprosesor belum memiliki memori internal sehingga
memerlukan IC memori eksternal
Dengan kelebihan-kelebihan diatas mikroprosesor tetap digunakan sebagai
yakni sebagai pegendali suatu sistem. Dengan menggunakan mikrokontroller
maka:
1. Sistem elektronik akan menjadi lebih ringkas.
2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari
sistem adalah perangkat lunak yang mudah dimodifikasi.
3. Pencarian gangguan lebih mudah ditelesuri karena sistemnya yang kompak.
Namun tidak sepenuhnya mikrokontroller bisa komponne IC TTl dan CMOS
yang sering kali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar
menambah jumlah saluran input dan output (I/O) dengan kata lain,
mikrokontroller adalah versi mini atau mikro dari sebuah komputer karena
mikrokontroller sudah mengandung beberapa bagian yang langsung
dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke
analog (DAC), konversi analog ke digital (ADC), dan sebagainya hanya
menggunakan Sistem Minimum yang tidak rumit.
Mikrokontroller adalah otak dari suatu sistem elektronika seperti halnya
mikroprosesor sebagai otak komputer. Namun mikrokontroller memiliki nilai
tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam
suatu kemasan IC. Mikrokontroller AVR (Alf and Vegard’s RISC processor)
standart memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode
16-bit dan sebagian besar instriksi dieksekusi dalam satu siklus clock. Berbeda
dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki
arsitektur CISC (seperti komputer).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga
ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya
yang membedakan masing-masing kelas adalah memori, peripheral, dan
fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka dikatakan
hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu
ATMega8535. Selain mudah didapatkan dan lebih murah ATMega 8535 juga
memiliki fasilitas yang lebih lengkap. Untuk tipe AVR ada 3 jenis yaitu ATTiny,
AVR klasik, dan ATMega. Perbedaannya hanya pada fasilitas dan I/O yang
tersedia serta fasilitas lainnya seperti ADC, EEPROM, dan lain sebagainya. Salah
maksimal 16 MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan
varian MCS51. Dengan fasilitas yang lengkap tersebut menjadikan ATMega 8535
sebagai mikrokontroller yang powerfull. Adapun diagram blok ATMega 8535
adalah sebagai berikut:
rr
Gambar 2.4 Diagram Blok ATMega 8535 (Lingga,2006)
Dari gambar tersebut dapat dilihat bahwa ATMega 8535 memiliki bagian
sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial
Kapabilitas detail dari ATMega 8535 adalah sebagai berikut:
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
2. Kapasitas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
2.3.1 Konfigurasi PIN ATMega 8535
Mikrokontroller ATMega 8535 mempunyai pin sebanyak 40 buah, dimana 32
pin diantaranya untuk keperluan port I/O yang dapat menjadi pin input/output
sesuai konfigurasi. Pada 32 tersebut terbagi atas 4 bagian (port), yang
masing-masing terdiri dari 8 pin. Pin lainya digunakan untuk keperluan rangkaian osilator,
supplay tegangan, reset, serta tegangan reverensi untuk ADC. Konfigurasi pin
ATMega 8535 digambarkan sebagai berikut:
Dari gambar diatas dapat dijelaskan secara fungsional konfigurasi pin
ATMega 8535 adalah sebagai berikut :
VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
GND merupakan pin ground.
Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC
Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog dan SPI.
Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog dan Timer Oscilator.
Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator analog, interupsi eksternal dan komunikasi serial.
RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
AVCC merupakan pin masukan tegangan untuk ADC.
AREF merupakan pin masukan tegangan referensi ADC.
2.3.2 Peta Memori ATMega 8535
ATMega memiliki dua jenis memori yaitu Data Memory dan Program
Memory ditambah satu fitur tambahan yaitu EEPROM Memory untuk
menyimpan data.
2.3.3 Program Memory
ATMega memiliki On-Chip In-System Reprogrammable Flash Memory untuk
menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi
dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash
Section digunakan untuk menyampaikan program Boot Loader, yaitu program
yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyampaikan program aplikasi
yang dibuat user. AVR tidak dapat menjalankan program aplikasi ini sebelum
menjalankan program Boot Loader. Berdasarkan memori Boot Flash Section
konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program
pada Application Flash Section juga sudah aman.
Gambar 2.6 Peta Memori Program
2.3.4 EEPROM Data Memori
ATMega 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan
data. Lokasinya terpisah dengan sistem address register, data register dan control
register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000
sampai $1FF.
EEPROM
$000
$01FF
Gambar 2.7 EEPROM Data Memori
2.4 Motor Steper
Motor stepper adalah suatu alat penggerak yang memanfaatkan gaya tarik
magnet. Rotornya berhenti pada posisi kutub yang dieksitasi oleh arus yang
mengalir pada lilitan. Rotor pada motor biasanya berputar secara kontinyu jika
mengubah eksitasi kutub. Arus yang mengalir pada setiap lilitan hanya sesaat
sehingga bentuk arusnya berupa pulsa. Rotor berputar karena pulsa yang
bergantian. Kecepatan putaran rotor ditentukan oleh kecepatan perpindahan
pulsa dan sudut putaran sebanding dengan banyaknya pulsa yang
beberapa pasang kutub dimana setiap pasang kutub diaktifkan melalui prinsip
elektromagnetik oleh arus yang mengalir melalui kumparan yang dililitkan
pada masing - masing kutub. Pada saat sepasang kutub dalam keadaan aktif
sehingga akan timbul medan magnet yang kemudian menarik pasangan gigi
rotor terdekat, sehingga gigi akan bergerak ke posisi segaris dengan kutub.
Untuk menggerakkan sebuah motor stepper setiap pasang kumparan stator
harus disambungkan dengan aliran listrik dan diputuskan secara bergantian dalam
urutan yang benar. Dengan demikian, input ke motor berupa deretan pulsa yang
menghasilkan output ke setiap pasang kumparan stator.
Sistem penggerak yang biasa digunakan terdiri dari dua blok utama yaitu
pengatur urutan logika dimana menerima pulsa - pulsa input dan
menghasilkan pulsa - pulsa output dalam urutan sebagai mana yang
dibutuhkan untuk mengontrol penggerak agar menghasilkan pulsa output
dengan amplitudo yang sesuai.
Motor langkah (stepper) banyak digunakan dalam berbagai aplikasi,
dipergunakan apabila dikehendaki jumlah putaran yang tepat atau diperlukan
sebagian dari putaran motor. Aplikasi penggunaan motor langkah dapat juga
dijumpai dalam bidang industri atau untuk jenis motor langkah kecil dapat
di gunakan dalam perancangan suatu alat mekatronik atau robot. Pada
gambar 2.1 berikut ditunjukkan dasar susunan sebuah motor langkah
I
III
IV
II
Gambar 2.8 Diagram motor langkah (stepper)
Magnet permanen berputar kearah medan magnet yang aktif. Apabila
kumparan stator dialiri arus sedemikian rupa, sehingga akan timbul medan
magnet dan rotor akan berputar mengikuti medan magnet tersebut. Setiap
pengalihan arus ke kumparanberikutnya menyebabkan medan magnet berputar
menurut suatu sudut tertentu, biasanya informasi besar sudut putar tertulis pada
badan motor langkah yang bersangkutan. Jumlah keseluruhan pengalihan
menentukan sudut perputaran motor. Jika pengalihan arus ditentukan, sehingga
rotor akan berhenti pada posisi terakhir. Jika kecepatan pengalihan tidak terlalu
tinggi, sehingga slip akan dapat dihindari. Memerlukan umpan balik (feedback)
pada pengendalian motor langkah.
Motor langkah yang akan di gunakan memiliki 4 fasa (pole atau kutub),
pengiriman pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan
secara bergantian, masing-masing 3 data (sesuai dengan jumlah fasa-nya),
sebagian di tunjukkan pada gambar 2.2 berikut.
Gambar 2.9 Pemberian data/pulsa pada motor stepper
Pada saat yang sama, untuk tiap motor langkah, tidak boleh ada 2 (dua)
Pengatur
kata lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan
lainnya bernilai 0 (nol).
Sistem penggerak yang biasa digunakan terdiri dari dua blok utama yaitu
pengaturan urutan logika dan sebuah penggerak ditunjukkan pada gambar 2.3.
Gambar 2.10 Sistem Penggerak Motor stepper
Pengatur urutan logika menerima pulsa – pulsa input dan menghasilkan
pulsa output dalam urutan sebagaimana yang dibutuhkan untuk mengontrol
penggerak agar menghasilkan pulsa output dengan amplitude yang sesuai.
2.5 Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat, sebagai
sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi
sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran
listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET),
memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber
listriknya.
Pada umumnya, transistor memiliki 3 terminal, yaitu Basis (B), Emitor (E)
dan Kolektor (C). Tegangan yang di satu terminalnya misalnya Emitor dapat
dipakai untuk mengatur arus dan tegangan yang lebih besar daripada arus input
Basis, yaitu pada keluaran tegangan dan arus output Kolektor.
Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat).
Rangkaian analog melingkupi pengeras suara, sumber listrik stabil (stabilisator)
dan penguat sinyal radio. Dalam rangkaian-rangkaian digital, transistor digunakan
sebagai saklar berkecepatan tinggi. Beberapa transistor juga dapat dirangkai
sedemikian rupa sehingga berfungsi sebagai logic gate, memori dan fungsi
2.6 Modul LCD (Liquid Crystal Display)
M1632 merupakan modul LCDmatrix dengan konfigurasi 16 karakter dengan
2 baris dengan setiap karakernya dibentuk oleh 8 baris pixel dan 5 kolom pixel (1
baris pixel terakhir adalah kursor). HDD44780 ini sudah tersedia dalam modul
M1632 yang dikeluarkan oleh Hitachi, Hyundai dan modul-mosul M1632 lainnya.
HDD44780 sebetulnta merupakan mikrokontroller yang dirancang khusus
untuk mengendalikan LCD da mempunyaii kemampuan untuk mengatur proses
scanning pada layar LCD yang terbentuk oleh 16 COM dan 40 SEG sehingga
mikrokontroller/perangkat yang mengakses modul LCD ini tidak erlu lagi
mengatur proses scanningpada layar LCD. Kikrokontroller atau perangkat
tersebut hanya mengirimkan data-data yang merupakan karakter yang akan
ditampilkan pada layar LCD atau perintah yang mengatur proses tampilan pada
LCD saja.
2.6.1 Kaki-Kaki Modul LCD
Untuk keperluan antarmuka suatu komponen elektronuk degan
mikrokontroler, perlu diketahui fungsi dari setiap kaki yang ada pada komponen
tersebut.
a. Kaki 1 (GND)
Kaki ini berhubungan dengan tegangan +5 Volt yang merupakan tegangan
untuk sumber daya HD44780 (khusu untuk modul M1632 keluaran hitachi,
kaki ini adalah VCC).
b. Kaki 2 (VCC)
Kaki ini berhhubungan dengan tegangan 0 volt (ground) dan modul LCD
(khusus untuk modul M1632 keluaran hitachi, kaki ini adalah GND)
c. Kaki 3 (VEE)
Tegangan pengatur kontras LCD, kaki ini terhubung pada V5. Kontras
mencapai nilai maksimum pada saat kondisi kaki ini pada tegangan 0 volt.
d. Kaki 4 (RS)
Register select, kaki pemilih register yang akan diakses, untuk akses ke
register data, logika dari kaki ini adalah 1 dan untuk akses ke register perintah,
e. Kaki 5 (R/W)
Logika 1 pada kaki ini menunjukkan bahwa modul LCD sedang pada
mode pembacaan dan logika 0 menunjukkan bahwa ,odul LCD sedang pada
mode penulisan. Untuk aplikasi yang tidak memerlukan pembacaan data pada
modul LCD, kaki ini dapat dihubungkan langsung ke ground.
f. Kaki 6 (F)
Enable Clock LCD, kaki ini mengaktifkan clock LCD. Logika 1 pada kaki
ini diberikan pada saat penulisan atau pembacaan data.
g. kaki 7-14 (D0-D7)
Data bus, kedelapan kaki modul LCD ini adalah bagian dimana aliran data
sebanyak 4-bit atau 8 -bit mengalir saat proses penulisan maupun pembacaan
data.
h. Kaki 15 (Anoda)
Berfungsi untuk tegangan positif dari backlight modul LCD sekitar 4,5
volt (hanya terdapat untuk M1632 yang memiliki backlight).
i. Kaki 16 (Katoda)
Tegangan negatif backlight modul LCD sebesar 0 volt (hanya untuk
M1632 yang memiliki backlight).
2.6.2 Struktur Memory LCD
Modul LCD M1632 memiliki beberapa jenis memory yang digunakan untuk
menyimpan atau memproses data-data yang akan ditampilkan pada layar LCD.
Setiap jenis memori mempunyai fungsi-fungsi tersendiri salah satunya yaitu
DDRAMmerupakan memori tempat karakter yang ditampilkan.
2.7 DHT11(Suhu And Humidity Sensor)
Sensor Suhu dan kelembaban yang dilakukan pada penelitian ini adalah
DHT11 Temperature and humidity sensor.DHT11merupakan sensor digital untuk
mengukur Suhu dan kelembaban udara di sekitarnya. Sensor ini memiliki tingkat
stabilitas yang sangat baik dengan fitur kalibrasi yang sangat akurat. Walaupun
Gambar 2.11 Sensor DHT11 (Temperature And Humidity Sensor)
Sensor ini membutuhkan suplai voltase +5 volt. Pengukuran Suhu oleh alat ini
berkisar antara 0 – 50 oC, dengan eror ±2 oC. Sedangkan pada pengukuran
kelembaban berkisar antara 20 – 90 %RH, dengan eror ±5 %RH. Dimana data
BAB 1
PENDAHULUAN
1.1Latar Belakang
Peningkatan populasi dan pertumbuhan ekonomi memicu bertambahnya
permintaan terhadap energi dunia. Dengan persediaan energi saat ini berarti terjadi
penambahan pemakaian persediaan energi fosil dan meningkatnya emisi dari gas
yang dapat membahayakan lingkungan. Jika hal ini terjadi terus menerus maka
lingkungan dan masa depan kita tidak mempunyai cara untuk mengisi ulang lagi
sumber minyak tersebut. Dengan demikian perlu menemukan alternatif lain guna
mendukung atau mempertahankan kebutuhan saat ini dan gaya hidup yang
menggunakan energi yang dapat diperbaharui. Ada beberapa sumber yang dapat
diperbaharui yang tersedia dimana dapat digunakan dalam skala besar untuk
menghasilkan listrik di daerah terpencil dimana jaringan listrik tidak tersedia.
Yang termasuk dalam tipe ini antara lain energi matahari, angin, air, panas bumi,
dan lain-lain. Dalam penggunaan energi matahari dibutuhkan suatu alat konversi
yaitu sel-sel surya yang mengubah intensitas matahari menjadi aliran arus listrik.
Sel surya merupakan alat untuk mengubah sinar matahari langsung menjadi
listrik dimana digunakan untuk lampu lalu lintas, telephone, lampu jalan, rumah,
mobil listrik tenaga surya, dan lain-lain. Akan tetapi permasalahan sekarang ini
yaitu sel surya yang terpasang kebanyakan masih bersifat statis. Hal ini
menyebabkan penyerapan energi matahari tidak optimal. Oleh karena itu, perlu
dibuat suatu sistem yang dapat membuat sel surya selalu mengikuti arah
pergerakan matahari.
Beberapa penelitian sebelumnya telah membuat suatu sistem optimalisasi
pemanfaatan energi matahari namun penjejak matahari itu hanya dapat mengikuti
arah pergerakan matahari dari timur ke barat saja yang bergerak dengan satu
sumbu, sehingga penyerapan matahari tidak begitu optimal. Sehingga dalam
optimalisasi dari penjejak matahari. Akan tetapi, dalam pemanfaatan energi
matahari perlu diperhatikan pengaruh Suhu dan kelembaban yang akan
mengurangi kemampuan dalam menerima cahaya matahari. Oleh sebab itu, sistem
dua sumbu atau Dual Axis dilengkapi sensor Suhu dan kelembaban untuk
memungkinkan penjejak matahari dapat mengontrol posisi matahari lebih optimal
dengan mempertimbangkan pengaruh Suhu dan kelembaban. Hal ini
memungkinkan penjejak matahari dapat mengikuti arah matahari secara lebih
tepat sepanjang tahun.
Diharapkan alat penjejak matahari dengan judul “RANCANG BANGUN
PENJEJAK MATAHARI DUAL AXIS MENGGUNAKAN SENSOR LDR
SERTA PENGARUH SUHUDAN KELEMBABAN TERHADAP
OPTIMALISASI PENYERAPAN TENAGA SURYA” dapat mengatasi krisis
energi di Indonesia.
1.2 Rumusan Masalah
Rumusan yang penulis kemukaan dalam merancang suatu alat menjejak matahari
diantaranya adalah:
1. Merancang suatu mekanisme gerak untuk mengarahkan panel surya ke arah
cahaya matahari dengan mempertimbangkan pengaruh Suhu dan kelembaban.
2. Merancang sistem kontrol yang dapat bekerja otomatis sebagai penjejak dan
pengendali arah panel surya.
1.3 Batasan Masalah
Agar pembahasan tidak terlalu luas dan mendalam,penulis melakukan
pembatasan pada hal-hal tertentu yaitu:
1. Pembahasan rancangan sebatas aplikasinya dalam rancangan dan tidak
membahas teori-teori secara mendalam.
2. Rancangan menggunakan komponen-komponen elektronika yaitu :
Mikrokontroller ATMEGA 8535, LDR, DHT11, Kabel RS 232, Motor steper,
panel Surya, dan PC .
1.4 Tujuan Penelitian
Tujuan yang ingin dicapai pada tugas akhir ini adalah:
1. Mendesain solar tracker dual axis pada panel surya 20 Wp yang akan
mengkonversi sinar matahari menjadi energi listrik.
2. Mengetahui efektifitas panel surya yang bergerak (pengarah)
3. Mengetahui pengaruh Suhu dan kelembaban panel surya terhadap
optimalisasi penyerapan cahaya matahari.
1.5 Manfaat Penelitian
1. Manfaat rancangan adalah untuk memperoleh serapan energi matahari secara
optimal.
2. Energi yang diperoleh dapat digunakan sebagai energi pengganti dari sumber
energi tak terbarukan.
1.6Sistematika Peulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat ini sebagai
berikut :
BAB I PENDAHULUAN
Bab ini mencakup latar belakang penelitian, batasan masalah yang
akan diteliti, tujuan penelitian, manfaat penelitian, dan sistematika
penulisan
BAB II TINJAUAN PUSTAKA
Bab ini membahas tentang landasan teori yang menjadi acuan
untuk proses pengambilan data, analisa, serta pembahasan
BAB III METODE PENELITIAN
Bab ini membahas tentang peralatan dan bahan penelitian, tempat
BAB IV HASIL DAN PEMBAHASAN
Bab ini membahas tentang data hasil penelitian dan analisa yang
diperoleh daripenelitian
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan tentang kesimpulan yang diperoleh dari
DAFTAR PUSTAKA
Agus K, 2011. Rancang Bangun Sistem Penjejak Matahari Untuk
Mengoptimalisasi Tegangan Sel Surya. Jurnal Teknik Elektro. Volume 3
Halaman 11-10. Bandung : Universitas Komputer Indonesia
Amar, M. 2012. Rancang Bangun Sistem Penjejak Matahari 2 Sumbu Berbasis
Kontrol Adative Neuro-Fuzzy Inference System (ANFIS). Jurnal Sains Dan
Semi Pomits. Volume 1 (1) Halaman 1-6. Surabaya : ITS
Aminudin, M. 2010. Desain Dan Realisasi Sistem Tracking Matahari Pada Solar
Panel Menggunakan Matriks Vision Sensor Dengan Resolusi Rendah,
Jurnal Teknik Telekomunikasi. Bandung : Universitas Telkom
Aprilina, P. 2005. Pengembangan Produk Keramik Berpori Dengan Proses
Ekstrusi Pada Skala Laboratorium. Jurnal Teknik Kimia Indonesia.Volume
4 (2) Halaman 227-233. Bandung : Institut Teknologi Bandung
Budiharto, Widodo,2007,”Proyek Sistem Akuisisi Data”, PT Elex Media
Komputindo, Jakarta.
Daryanto, 2010,“Teknik Mekatronika”,Penerbit : Satu Nusa,Bandung
Hendry, E. 2012. Perancangan Prototype Penjejak Cahaya Matahari Pada Aplikasi
Pembangkit Listrik Tenaga Surya. Jurnal Ilmiah Foristek. Volume 2 (2).
Bengkulu : Universitas Bengkulu
Karmon Sigalingging,1994 “Pembangkit Listrik Tenaga Surya”, Tarsito,
Bandung.
Rangkuti,Syahban,2011,”Mikrokontroller Atmel AVR”, Edisi Pertama. Penerbit :
Informatika,Jakarta
Uqud, A. 2014. Rancang Bangun Penjejak Matahari Untuk Panel Surya Pada
Sistem Teknologi HybridKonversi Energi Surya dan Angin. Jurnal Fisika.
Volume 2. Halaman 23-27. Surabaya : ITS
Wardhana,Lingga, 2006, “Belajar Sendiri Mikrokontroller AVR seri ATMEGA
Wasana, S. 2013. Rancang Bangun Solar Tracking System Untuk
Mengoptimalkan Penyerapa Energi Matahari Pada Solar Cell. Jurnal
Teknik. Volume 3 (1) Halaman 27-28. Depok : Universitas Indonesia
RANCANG BANGUN PENJEJAK MATAHARI DUAL AXIS
MENGGUNAKAN SENSOR LDR SERTA PENGARUH SUHU
DAN KELEMBABAN TERHADAP OPTIMALISASI
PENYERAPAN TENAGA SURYA
SKRIPSI
DiajukanOleh :
TRY FADLY PRASETIYA
100801062
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
RANCANG BANGUN PENJEJAK MATAHARI DUAL AXIS MENGGUNAKAN SENSOR LDR SERTA PENGARUH SUHU DAN KELEMBABAN TERHADAP OPTIMALISASI PENYERAPAN TENAGA
SURYA
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
DiajukanOleh : TRY FADLY PRASETIYA
100801062
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA