Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
SEMINAR RADAR NASIONAL 2008
Prosiding
Gedung Widya Graha LIPI
Jakarta, 30 April 2008
Prosiding
Seminar Radar Nasional 2008
ISSN : 1979 - 2921
Hak cipta © 2008 oleh Pusat Penelitian Elektronika dan Telekomunikasi – LIPI
Hak cipta dilindungi undang-undang. Dilarang menyalin, memproduksi dalam segala bentuk, termasuk
mem-
fotocopy
, merekam, atau menyimpan informasi, sebagian atau seluruh isi dari buku ini tanpa ijin
tertulis dari penerbit.
Prosiding Seminar Radar Nasional / [editor by] Mashury Wahab, A.A. Lestari, A.B. Suksmono,
Rustini S. Kayatmo, Purwoko Adhi, Goib Wiranto.
vi + pp.; 21,0 x 29,7 cm
ISBN : 1979 - 2921
Radio Detecting and Ranging (Radar)
Technical editing by Pamungkas Daud, Yusuf Nur Wijayanto, and Dadin Mahmudin,
Cover design by Yadi Radiansah.
Diterbitkan oleh :
Pusat Penelitian Elektronika dan Telekomunikasi (PPET)
Lembaga Ilmu Pengetahuan Indonesia (LIPI)
Kampus LIPI Jl. Sangkuriang, Bandung
Telp. (022) 2504661 Fax. (022) 2504659
Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
Pelindung
Deputi Ilmu Pengetahuan Teknik LIPI
Ketua Umum
Yuyu Wahyu
Panitia Pengarah
Lilik Hendradjaja, Dephan
Endon Bharata, IRCTR-IB
Adang Suwandi, ITB
Nana Rachmana, ITB
Masbah RT Siregar, LIPI
Mashury Wahab, LIPI
Tatang A. Taufik, BPPT
Syamsu Ismail, LIPI
Hiskia Sirait, LIPI
Rustini S Kayatmo, LIPI
Andriyan B Suksmono, ITB
Purwoko Adhi, LIPI
A Andaya Lestari,IRCTR-IB
Eko Tjipto Rahardjo, UI
Panitia Pelaksana
Novrita Indayanti, LIPI
Ridwan Effendi, ITB
Lilis Retnaningsih, LIPI
Andi Kirana, RCS
Folin Oktafiani, LIPI
Gunawan Handayani, ITB
Yusuf Nur Wijayanto, LIPI
Asep Yudi Hercuadi, LIPI
Sulistyaningsih, LIPI
Pamungkas Daud, LIPI
Yadi Radiansah, LIPI
Deni Permana K, LIPI
Zaenul Arifin, LIPI
Sri Hardiati, LIPI
Popi Sumarni, LIPI
Yudi Yulius Maulana, LIPI
Lisdiani, LIPI
Dadin Mahmudi, LIPI
Endang Ridwan, LIPI
Iqbal Syamsu, LIPI
Noorfiya Umniyati, LIPI
Lia Mulyani P, LIPI
vi
Daftar Isi
Susunan Panitia ... iv
Kata Pengantar ... v
Daftar Isi ... vi
Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
vii
Daftar Makalah
1.
Rancang Bangun Radar Pengawasan Pantai INDRA II Di Pusat
Penelitian Elektronika dan Telekomunikasi (PPET) LIPI ...
1 - 6
Mashury Wahab, Pamungkas Daud, Yuyu Wahyu, dan Rustini S. Kayatmo
2.
Status Pemetaan dengan Radar di Bakosurtanal ...
7 - 12
Fahmi Amhar, Ade Komara Mulyana, Aris Poniman
3.
Rancangbangun System Secondary Surveillance RADAR untuk Aplikasi
Tracking Peluncuran Roket Jarak Jauh ... 13 - 18
Wahyu Widada dan Sri Kliwati
4.
Pembangunan Radar VHF Lapan Di Pameungpeuk ... 19 - 24
M. Sjarifudin, S. Kaloka, A. Purwono, A. Kurniawan, P. Sitompul, S. Cahyo,
M. A. Aris, H. Bangkit, M. Batubara, J. R. Roettger, M. Chandra, G.
Viswanathan
5.
A Method to Determine Radial Speed of Target from the FMCW Radar
Signal ... 25 - 28
W. Sediono, A. A. Lestari
6.
Aplikasi Radar Pasif untuk Mengisi Celah Kosong Liputan Radar ... 29 - 32
Syamsu Ismail
7.
Pembangkit Gelombang RADAR Berdasarkan Teknik Heterodyne Optis . 33 - 36
Bambang Widiyatmoko, Tomi Budi Waluyo dan Masbah R.T. Siregar
8.
Phase Shifter Control Card dan Test Bench untuk Radar Thomson ... 37 - 41
Bambang Sutopo
9.
Pembuatan Exciter Untuk Perangkat Pemancar Jamming ... 42 - 47
Elan Djaelani, Daday Ruhiat
10.
Evaluasi Penerapan Gaya Pengembang – Telitian – Industri –
Manufaktur di Institut Teknologi Telkom ... 48 - 51
Soetamso, Suwandi, Kris Sujatmoko, Arfianto Fahmi, Heroe Wijanto,
Ashardi Haryuno
11.
Kajian Perbandingan Distribusi Amplitudo pada Pencatu Antena
Susun Untuk Aplikasi Radar Maritim ... 52 - 57
Y.K. Ningsih, F.Y. Zulkifli, E.T. Rahardjo, A.A. Lestari
12.
Pengolahan Sinyal
Stepped Frequency Continous Wave – Ground
Penetrating Radar
(SFCW-GPR) dengan Metode
Gabor Based
Compressive Sampling
... 58 - 62
Dodik Ichrom Resanto
13.
Desain Parallel-Coupled Microstrip Bandpass Filter dengan Substrate
viii
Liarto, A.A. Lestari
14.
Metode Pengaturan Impedansi Input Antena pada Sistem SFCW GPR
100 – 1000 MHz ... 69 - 72
A.A. Pramudita,A. Kurniawan, A. B Suksmono, A.A. Lestari
15.
Analisa Spektral Curah Hujan Tropis Menggunakan Data Surabaya
Untuk Evaluasi Sistem Radar Dan Komunikasi Radio Di Atas 10 Ghz ... 73 - 76
Achmad Mauludiyanto, Gamantyo Hendrantoro
16.
Penerapan dan Pengembangan Georadar RCS ... 77 - 80
A. Sulaiman, A. Kirana
17.
Sistem Identification Friend, Foe, or Neutral Radar Menggunakan
Radar Cross Section dan Kecepatan Pesawat Berbasis Jaringan Syaraf
Tiruan Adaptive Resonance Theory 1 dan Fusi Informasi ... 81 - 86
Nopriansyah, Aciek Ida Wuryandari, Arwin D.W. Sumari, Andaruna
Setiawan
18.
Dekoding Format Data Untuk Integrasi Sistem Radar Yang Berbeda ... 87 - 90
Thomas Sri Widodo
19.
Desain Graphical User Interface (GUI) Untuk Radar Maritim Indra ... 91 - 96
Deni Yulian, Imam Fahrur Rozi, A. Andaya Lestari
20.
Rangkaian Pengukuran Jarak dengan Gelombang Ultrasonik
menggunakan AT89C51 ... 96 - 100
Teguh Praludi, Yusuf Nur Wijayanto
21.
Kajian Penggunaan Dielectric Resonant Oscillator (DRO) untuk
Frequency Modulated Continuous Wave (FM-CW) Radar ... 101 - 104
Rustini Soemaryato Kayatmo, Fredrika H. Kana
22.
Rancang Bangun Perangkat Lunak Citra RADAR ... 105 - 109
Mashury, Dadin Mahmudin, Yusuf Nur Wijayanto
23.
Analisa Plot Medan Listrik untuk Antena GPR Dengan dan Tanpa
Pembebanan Resistif dan Kapasitif menggunakan Simulasi FDTD ... 110 - 115
Folin Oktafiani, Yudi Yuliyus Maulana, Yuyu Wahyu
24.
Rectangular Patch Array untuk Sistem Antena Radar Pantai ... 116 - 118
Pamungkas Daud, Yusuf Nur Wijayanto
25.
Estimasi Batasa Penyinaran Radiasiterhadap Lingkungan dari Gerakan
Beam Antena Radar ... 119 - 122
Sri Hardiati
26.
Antena Adaftif untuk Ground Penetrating Radar ... 123 - 127
Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
81
Sistem Identification Friend, Foe, or Neutral Radar Menggunakan Radar
Cross Section dan Kecepatan Pesawat Berbasis Jaringan Syaraf Tiruan
Adaptive Resonance Theory 1 dan Fusi Informasi
Nopriansyah
1), Aciek Ida Wuryandari
2), Arwin D.W. Sumari
3), Andaruna Setiawan
4)1) 2) 3) Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung Gedung Labtek VIII Kampus ITB, Jl. Ganesa No. 10, Bandung, 40132– INDONESIA Email: [email protected], [email protected], [email protected]
3) 4) Departemen Elektronika, Akademi TNI Angkatan Udara
Ksatrian Akademi TNI AU, Lanud Adisutjipto, Yogyakarta, 55002 – INDONESIA Email: [email protected]
ABSTRACT
To identify an object in the air, Radar will transmit Identification Friend, Foe, or Neutral (IFFN) signal. The detected object then will be manually matched to the flight data. If the air object detected by the Radar is unregistered then this object will be identified as a black flight. In order that this object identification process can be quickly and accurately done, an Identification Friend, Foe, or Neutral (IFFN) system based on Adaptive Resonance Theory 1 Neural Network (ART1-NN) and information fusion is proposed and designed. The system uses the air object Radar Cross Section (RCS) and velocity data as the identifier data. The ART1-NN matches the RCS and velocity data of the detected air object to the data it already learned. The final identification process is done by fusing the information resulted from the ART1-NN matching process by using voting and Boolean AND methods to obtain the identity of the observed air object. The IFFN system is hoped to be able to give a worth contribution in order to guard the Republic of Indonesia sovereignty in the sky.
Keywords : Radar, identification, radar cross section, velocity, ART1-NN, information fusion.
ABSTRAK
Untuk mengidentifikasi suatu obyek di udara, Radar akan memancarkan sinyal Identification Friend, Foe, or Neutral (IFFN). Obyek yang ditangkap Radar akan dicocokkan dengan data penerbangan yang ada secara manual. Bila obyek udara yang ditangkap oleh Radar tidak terdaftar maka obyek udara tersebut akan diidentifikasikan sebagai penerbangan gelap (black flight). Agar proses identifikasi obyek udara dapat dilaksanakan dengan cepat dan akurat, diajukan dan dirancang satu sistem Identification Friend, Foe, or Neutral (IFFN) berbasis Jaringan Syaraf Tiruan model Adaptive Resonance Theory 1 (JST-ART1) dan fusi informasi. Sistem menggunakan data Radar Cross Section (RCS) dan kecepatan obyek udara sebagai data pengidentifikasi. JST-ART1 bertugas mencocokkan data RCS dan kecepatan obyek udara yang dideteksi dengan data yang telah dipelajarinya. Proses identifikasi akhir dilakukan dengan memfusikan informasi hasil pencocokan JST-ART1 menggunakan metoda voting dan Boolean AND untuk memperoleh identitas obyek udara dalam pengamatan. Sistem IFFN ini diharapkan dapat memberikan satu kontribusi berharga dalam rangka menjaga kedaulatan Negara Kesatuan Republik Indonesia (NKRI) di udara.
Kata Kunci : Radar, identifikasi, radar cross section, kecepatan, JST-ART1, fusi informasi.
1. PENDAHULUAN
Di dalam suatu sistem pertahanan udara, Radar adalah komponen utama dengan salah satu tugas melakukan peringatan dini (early warning) terhadap adanya kedatangan obyek-obyek di suatu wilayah udara. Untuk mengenal obyek tersebut, Radar akan memancarkan sinyal Identification Friend, Foe, or Neutral (IFFN). Bila obyek tersebut kawan atau netral maka ia akan memberi jawaban berupa urutan kode tertentu yang menunjukkan identitasnya. Sebaliknya bila musuh, ia tidak akan memberi jawaban atau mematikan alat penjawabnya. Identitas setiap obyek
yang akan melintas di atas suatu wilayah udara dalam pemantauan suatu Radar telah didaftarkan secara resmi kepada otoritas yang berwenang. Oleh karena itu bila ada suatu obyek dideteksi oleh Radar maka informasi identitas obyek tersebut dapat dengan mudah dimunculkan pada layar monitor.
dan menyerang pesawat-pesawat tempur pengamat sehingga dapat berakibat fatal.
82
Untuk mengatasi permasalahan tersebut dan agar keputusan yang diambil oleh otoritas yang berwenang dapat dilakukan dengan cepat dan tepat, diajukan satu sistem IFFN berbasis Jaringan Syaraf Tiruan model Adaptive Resonance Theory 1 (JST-ART1) dengan menggunakan data Radar Cross Section (RCS) dan kecepatan obyek udara. Obyek udara yang dimaksud dalam makalah ini adalah pesawat terbang.
2. LANDASAN TEORI
2.1. Konsep Radar [7]
Radar adalah singkatan dari Radio Detection And Ranging. Radar dapat diartikan sebagai alat yang digunakan untuk pencarian, pengawasan dan penangkapan pesawat udara yang terbang dalam kawasan wilayah jangkauan rambatan gelombang elektromagnetik yang dipancarkan.
Pada prinsipnya Radar memancarkan pulsa elektromagnetik ke udara dan menerima echo yang dipantulkan oleh benda-benda sasaran. Selang waktu antara pengiriman dan penerimaan kembali pulsa elektromagnetik menunjukkan jarak antara pemancar dengan obyek yang dideteksi tersebut.
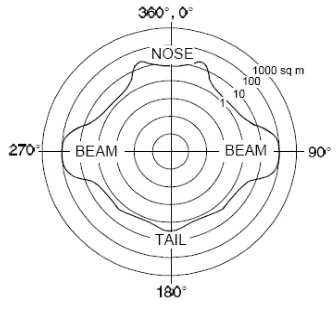
2.1.1. Radar Cross Section [1]
Radar Cross Section (RCS) adalah perbandingan antara kerapatan daya yang dipantulkan ke arah sumber pemancar dengan kerapatan daya yang dipantulkan oleh sasaran.
Untuk obyek udara berupa pesawat terbang, RCS dapat diperoleh dengan menggunakan persamaan 1.
( )
3 4antena penerima, Pt adalah daya yang dipancarkan
antena pemancar, G adalah antenna gain, R adalah jarak antara Radar dengan sasaran dan λ adalah panjang gelombang elektromagnetik Radar.
G a m b a r 2. Ma c a m RCS se sua i d e ng a n g e o me tri
sa sa ra n
Gambar 3 memperlihatkan contoh bentuk RCS pesawat terbang yang ditangkap oleh Radar. Setiap pesawat terbang/obyek udara memiliki RCS yang sangat berbeda sesuai dengan konfigurasi elemen-elemen pembentuk RCS itu sendiri.
Gambar 1. Cara kerja Radar.
2.1.2. Kecepatan (Velocity) Pesawat pada Radar
Kecepatan pesawat terbang yang ditampilkan pada layar Radar dapat diketahui dengan menggunakan azas Doppler yang diperlihatkan pada persamaan 2.
Gambar 3. RCS pesawat terbang pada umumnya..
Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
dengan fd adalah Doppler shift, v adalah kecepatan
pesawat terbang, λ adalah panjang gelombang dan θ adalah sudut antara arah propagasi sinyal datang dengan arah pergerakan antena.
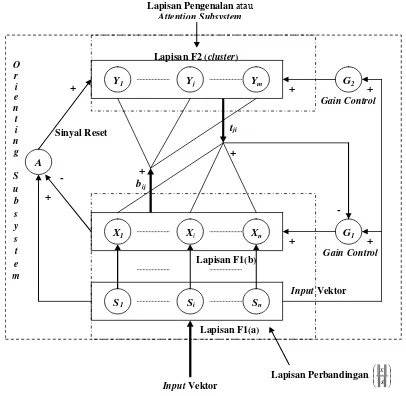
2.2. Adaptive Resonance Theory 1 (ART1) [6]
JST-ART dirancang untuk memudahkan pengontrolan derajat kemiripan pola yang ditempatkan pada cluster yang sama. ART dirancang untuk mengatasi masalah stability-plasticity yang dihadapi oleh JST lainnya. JST-ART1 dirancang untuk mengelompokkan (clustering) vektor-vektor masukan biner. JST-ART1 mempunyai dua lapisan, yaitu lapisan F1 yang dibagi menjadi F1(a) sebagai bagian
masukan dan F1(b) sebagai bagian antarmuka, dan
lapisan F2 (cluster) bersama dengan unit reset yang
digunakan untuk mengontrol derajat kemiripan pola-pola yang diletakkan pada unit cluster yang sama. Lapisan F1 dan F2 dihubungkan oleh dua kelompok jalur-jalur bobot, bobot bottom-up dan bobot top-down. Untuk mengontrol proses belajar, beberapa unit pelengkap juga dilibatkan pada JST ini.
83
Arsitektur JST-ART1 terdiri dari dua bagian. Arsitektur JST-ART1 diperlihatkan pada Gambar 5.
• Unit-unit Komputasional. Terdiri dari lapisan F1
(bagian masukan dan antarmuka), lapisan F2, dan
unit reset.
• Unit-unit Pelengkap. Unit ini menyediakan suatu mekanisme sehingga komputasi yang dilakukan oleh algoritma ART1 dapat dilaksanakan dengan menggunakan prinsip-prinsip JST. Unit-unit tersebut disebut juga dengan unit-unit gain control.
2.3. Fusi Informasi [2,3,4]
Fusi data atau informasi adalah suatu teknik pengombinasian data atau informasi untuk memperkirakan (estimate) atau memprediksi berbagai keadaan entitas. Entitas-entitas tersebut dapat berbentuk fisik atau non fisik. Masukan-masukan ke suatu sistem fusi informasi dapat berupa
1. data hasil observasi sensor-sensor,
2. masukan-masukan perintah dan data dari operator atau pengguna,
3. data a priori dari suatu basis data yang telah ada
2.3.1. Arsitektur-Arsitektur Fusi Informasi
Dalam aplikasi fusi informasi terdapat tiga alternatif arsitektur yang digunakan untuk memfusikan informasi dari multisensor.
• Arsitektur terpusat dengan masukan data kasar atau vektor fitur.
• Arsitektur mandiri dengan masukan vektor fitur dengan keluaran deklarasi identitas atau estimasi dari vektor keadaan. Teknik-teknik yang umum digunakan adalah suara terbanyak (voting), penyimpulan klasik, teorema Bayes, metoda DS dan metoda Dezert-Smarandache Theory (DSmT).
• Arsitektur hibrida yang mengombinasikan kedua arsitektur di atas.
Y1 Yj Ym
Lapisan F1(b) GainControl
Gain Control
Lapisan F2 (cluster)
Sinyal Reset
Lapisan Perbandingan ⎟⎟ ⎠
Lapisan Pengenalan atau
Attention Subsystem
A
+
-+
Gambar 5. Arsitektur JST-ART1.
2.3.2. Kelas-Kelas Tataran Fusi Informasi
Kelas-kelas tataran fusi informasi sensor majemuk (multisensor) pada umumnya digunakan untuk aplikasi-aplikasi pengenalan sasaran otomatis (automatic target recognition, ATR).
a. Fusi Tataran Piksel. Tataran ini diaplikasikan kepada data piksel teregistrasi dari sekumpulan citra untuk kepentingan fungsi deteksi dan diskriminan. Data citra diperoleh dari sensor-sensor citra seperti Radio Detection and Ranging (RADAR) dan Forward Looking Infra Red (FLIR).
b. Fusi Tataran Fitur. Tataran ini mengombinasikan fitur-fitur obyek yang dideteksi dan dipisahkan di dalam masing-masing wilayah sensor. Fitur-fitur setiap obyek diekstraksi secara independen di dalam setiap wilayah dan membentuk satu ruang fitur bersama untuk klasifikasi obyek.
Gambar 6. Arsitektur sistem IFFN.
3. DESAIN DAN KONSEP IMPLEMENTASI
SISTEM IFFN
Sistem IFFN dibagi ke dalam tiga bagian besar yakni pengolahan awal, identifikasi obyek dan pengolahan akhir dengan dua macam moda yakni moda pembelajaran JST-ART1 dan moda pakai. Arsitektur sistem IFFN diperlihatkan pada Gambar 6.
3.1. Pengolahan Awal
Pada pengolahan awal dilakukan proses ekstraksi fitur RCS dan kecepatan pesawat dari basis data pesawat terbang. Proses berikutnya adalah melakukan melakukan pembangkitan pola RCS dan pola kecepatan pesawat terbang dengan cara mengkonversikannya ke bentuk kode-kode biner. Kode-kode biner ini adalah pola-pola yang akan diajarkan kepada JST-ART1 pada moda pembelajaran.
84
3.2. Identifikasi Obyek
Pada moda aplikasi JST-ART1 akan langsung melakukan pencocokan pola masukan RCS dan pola kecepatan pesawat terbang dengan pengetahuan yang disimpan dalam memorinya. Proses temu kembali data identitas pesawat terbang dari dalam basis data dengan pola hasil fusi informasi pola RCS dan pola kecepatan pesawat terbang menggunakan metoda dari penelitian [2]. Pola-pola fitur RCS dan kecepatan yang dipelajari dan diujikan pada sistem IFFN diperlihatkan pada Tabel 1 dan Tabel 2.
Pada blok identifikasi obyek dilakukan proses pencocokan pola masukan data RCS dan data kecepatan pesawat terbang dengan pola yang disimpan di dalam memori JST-ART1. Informasi keluaran dari JST-ART1 kemudian difusikan untuk memperoleh satu estimasi pola identitas pesawat terbang dalam pengamatan. Fusi informasi dilakukan secara iteratif pada obyek yang sama menggunakan metoda voting pada tahap I. Estimasi pola diperoleh dari hasil fusi informasi tahap II menggunakan metoda Boolean AND. Daftar estimasi pola hasil fusi informasi sistem IFFN diperlihatkan pada Tabel 3.
Ta b e l 1. Da ta d a n Po la RCS Pe sa wa t Te rb a ng [8]
No. Jenis
Pesawat Terbang RCS Pola
1. Bell 47G 3 0000
Prosiding Seminar Radar Nasional 2008., Jakarta, 30 April 2008., ISSN : 1979-2921.
85
Fusi informasi digunakan untuk menghasilkan satu estimasi pola pesawat terbang bila informasi masukan RCS dan kecepatan hasil olahan JST-ART1 tidak memenuhi kriteria. Fusi informasi akan menghasilkan keluaran prediksi identitas pesawat terbang dalam pengamatan. Sebagai contoh hasil pencocokan dari JST-ART1 adalah pola 0001 atau pola RCS pesawat F-16 Fighting Falcon, dan pola 0011 atau pola kecepatan pesawat Su-30 Sukhoi. Keluaran ini memberikan ambiguitas mengenai identitas obyek yang dideteksi.
Dalam proses identifikasi ini dilakukan beberapa kali pembacaan data agar keluaran fusi informasi memberikan keyakinan identitas dari pesawat terbang yang dideteksi. Dengan mengombinasikan metoda fusi voting dan AND, sistem IFFN dapat dengan cepat mengidentifikasikan obyek pada contoh di atas sebagai pesawat F-16 Fighting Falcon. Proses fusi informasi diperlihatkan pada Tabel 4 dan Tabel 5.
Tabel 2. Data dan Pola Kecepatan Pesawat Terbang [8]
No. Jenis Pesawat
9. Unidentified unlisted 1000 10. Unidentified unlisted 1001 11. Unidentified unlisted 1010 12. Unidentified unlisted 1011 13. Unidentified unlisted 1100 14. Unidentified unlisted 1101 15. Unidentified unlisted 1110 16. Unidentified unlisted 1111
3.3. Pengolahan Akhir
Pada blok pengolahan akhir buffer menyimpan pola hasil fusi informasi pola RCS dan pola kecepatan pesawat. Informasi pada buffer ini digunakan sebagai masukan untuk pemanggilan kembali data identitas pesawat terbang yang disimpan dalam basis data pesawat terbang. Informasi identitas pesawat terbang atau obyek udara ini kemudian ditampilkan di layar tampilan untuk dijadikan sebagai dasar pengambilan keputusan oleh otoritas yang berwenang.
Tabel 5. Proses Fusi Informasi Tahap II dan Estimasi Pola
Obyek
Tabel 4. Proses Pencocokan dan Fusi Informasi Tahap 1
Iterasi RCS Voting v Voting
1 0001 0011
Tabel 3. Estimasi Pola Hasil Fusi Informasi RCS dan
Kecepatan Pesawat Terbang
No. Jenis Pesawat Terbang Estimasi Pola
Hasil Fusi Informasi
1. Bell 47G 0000 10. Unidentified 1001 11. Unidentified 1010 12. Unidentified 1011 13. Unidentified 1100 14. Unidentified 1101 15. Unidentified 1110 16. Unidentified 1111
4. KESIMPULAN
Identifikasi visual terhadap obyek udara tak dikenal (black flight) memberikan resiko tinggi bila obyek tersebut dipersenjatai dengan peralatan tempur yang lebih baik. Di sisi lain otoritas berwenang belum memiliki kemampuan untuk melakukan identifikasi obyek yang tak terdaftar dengan cepat dan akurat.
Solusi diberikan dengan mengaplikasikan Sistem IFFN berbasis JST-ART1 dengan menggunakan data RCS dan kecepatan pesawat terbang sebagai sarana identifikasi. Proses identifikasi dilakukan dengan cara mencocokkan pola fitur RCS dan kecepatan pesawat terbang dengan pola-pola yang telah dipelajari oleh JST-ART1. Untuk mendapatkan satu estimasi pola identitas bila data RCS dan kecepatan pesawat terbang tidak sesuai dengan kriteria yang ada, dilakukan proses fusi informasi pola RCS dan pola kecepatan pesawat terbang keluaran dari JST-ART1. Fusi informasi menggunakan kombinasi metoda voting dan Boolean AND.
86
oleh Radar. Informasi identitas ini dapat dijadikan dasar dalam pengambilan keputusan otoritas yang berwenang untuk mengirimkan pesawat tempur yang paling tepat guna mengatasi pesawat terbang atau obyek udara khususnya yang diidentifikasikan sebagai penerbangan gelap (black flight).
UCAPAN TERIMA KASIH
Makalah ini adalah salah satu bagian dari penelitian dalam program pengembangan kekuatan untuk memenuhi minimum essential force TNI Angkatan Udara dalam kerjasama dengan ITB melalui bidang pendidikan. Penulis mengucapkan terima kasih dan penghargaan yang tinggi kepada Kepala Staf TNI Angkatan Udara, Aspers Kasau, Gubernur AAU, Kadisdikau dan Kadiskomlekau atas dukungan dalam bidang pendidikan di ITB.
DAFTAR REFERENSI
[1] Antonius Arso, Ir., Teknik Radar, Diktat Kuliah Karbol Akademi Angkatan Udara, 2003.
[2] Arwin D.W. Sumari, Sistem Temu Kembali Informasi “Cerdas” Berbasis Jaringan Syaraf Tiruan Adaptive Resonance Theory 1, Laporan Tugas Akhir (S-1), Jurusan Teknik Elektro, Institut Teknologi Bandung, 1996.
[3] Arwin D.W. Sumari, Adang Suwandi Ahmad dan Aciek Ida Wuryandari, Fusi Informasi : Konsep dan Aplikasi dalam Bidang Teknologi Informasi dan Komunikasi, akan diterbitkan dalam Proceedings e-Indonesia Initiative 2008. [4] David L. Hall, Mathematical Techniques in
Multisensor Data Fusion, Artech House, 1992. [5] David L. Hall and James Llinas, Handbook of
Multisensor Data Fusion, CRC Press LLC, 2001. [6] David M. Skapura, Artificial Neural Networks:
Algorithms, Applications, and Programming, Addison-Wesley, 1991.
[7] Merrill I. Skolnik, Introduction to Radar Systems 3rd Edition, McGraw-Hill, 2001.
![Tabel 1. Data dan Po la RCS Pe sawat Terbang [8] Jenis](https://thumb-ap.123doks.com/thumbv2/123dok/3966345.1909765/11.595.100.515.81.313/tabel-data-dan-po-rcs-sawat-terbang-jenis.webp)
![Tabel 2. Data dan Pola Kecepatan Pesawat Terbang [8] Kecepatan](https://thumb-ap.123doks.com/thumbv2/123dok/3966345.1909765/12.595.86.301.95.326/tabel-data-pola-kecepatan-pesawat-terbang-kecepatan.webp)
