LAPORAN PRAKTIKUM
FOTOGRAMETRI II
(Disusun untuk memenuhi tugas mata kuliah Fotogrametri II)
Disusun oleh: Kelompok IX-A
Billy Silaen (21110114120017) Dito Seno Aji (21110114120029) Getma Lavemia (21110114120031)
Diyanah (21110114120033)
Nurrahmawati (21110114120039) Veri Pramesto (21110114120047)
PROGRAM STUDI TEKNIK GEODESI
FAKULTAS TEKNIK - UNIVERSITAS DIPONEGORO
Jl. Prof. Sudarto SH, Tembalang Semarang Telp.(024) 76480785, 76480788e-mail : [email protected] 2016
HALAMAN PENGESAHAN
Laporan Praktikum Fotogrametri II telah disetujui dan disahkan oleh Dosen Pembimbing Mata Kuliah Fotogrametri II, Program Studi Teknik Geodesi, Fakultas Teknik Universitas Diponegoro.
Disusun oleh: Kelompok IXA
Billy Silaen (21110114120017) Dito Seno Aji (21110114120029) Getma Lavemia (21110114120031) Diyanah (21110114120033) Nurrahmawati (21110114120039) Veri Pramesto (21110114120047) Semarang, 1 April 2016 Mengetahui, Asisten Dosen Bambang Septiana NIM 21110112130058 Dosen Pengampu Mata Kuliah
Ir. Sawitri Subiyanto, M.Si NIP 196603231999031008
KATA PENGANTAR
Pertama kali dan yang paling utama patut kita panjatkan puja dan puji syukur kehadirat Tuhan Yang Maha Esa karena atas limpahan rahmat, taufik, hidayah serta inayah-Nya kami dapat menyelesaikan Laporan Fotogrametri II ini tanpa menemui hambatan yang berarti. Tidak lupa pula kami ucapkan terima kasih kepada :
1. Bapak Ir. Sawitri Subiyanto, M.Si. selaku ketua jurusan Teknik Geodesi Fakultas Teknik Universitas Diponegoro sekaligus sebagai dosen pengampu mata kuliah Fotogrametri II yang telah membimbing kami dalam penyusunan laporan ini.
2. Bambang Septiana selaku asisten dosen mata kuliah Fotogrametri II yang telah membimbing kami dalam penyusunan laporan ini.
3. Seluruh pihak yang telah membantu kami dalam menyusun laporan praktikum Fotogrametri II yang tidak dapat kami sebutkan namanya satu persatu
Adapun tujuan pembuatan laporan ini adalah untuk memenuhi tugas mata kuliah Fotogrametri II serta menjadikannya sebagai suatu media pembelajaran bagi kita semua.
Kami sadar bahwa laporan yang kami susun masih sangat jauh dari kesempurnaan, oleh karena itu masukan dan kritikan yang bersifat membangun sangat kami harapkan sebagai acuan agar menjadi lebih baik lagi. Terima kasih kami sampaikan.
Semarang, 1 April 2016
DAFTAR ISI
HALAMAN PENGESAHAN ii
KATA PENGANTAR iii DAFTAR ISI iv
DAFTAR GAMBAR vi DAFTAR TABEL ix
BAB I PENDAHULUAN I-1
I.1 Latar Belakang...I-1 I.2 Maksud dan Tujuan...I-2 I.2.1 Maksud...I-2 I.2.2 Tujuan...I-2 I.3 Pembatasan Masalah...I-2 I.4 Rumusan Masalah...I-2 I.5 Sistematika Pembuatan Laporan Praktikum...I-3 BAB II DASAR TEORI II-1
II.1 Foto Udara...II-1 II.1.1 JenisFotoUdara...II-1 II.1.2 Geometri Foto Udara...II-2 II.1.3 Skala Foto Udara...II-3 II.1.4 Perencanaan Pemotretan Foto Udara...II-3 II.1.5 Sumber-Sumber Kesalahan Foto Udara...II-5 II.2 Konsep Orthophoto Digital...II-6 II.2.1 Interior Orientation (Orientasi Dalam)...II-6 II.2.2 Exterior Orientation...II-7 II.3 Kalibrasi Kamera...II-7 II.4 Titik Kontrol...II-9
II.5 Fiducial Mark...II-10 II.6 Tie Point...II-10 II.7 Mozaik Foto Udara...II-11 II.8 Digital Elevation Model...II-12 II.9 Konsep Pembentukan Dem Hasil Ekstrasi Foto Udara...II-12 II.10 Software PCI Geomatica...II-13 II.11 Software PCI Geomatica...II-15 BAB III PELAKSANAAN PRAKTIKUM III-1
III.1Alat dan Bahan...III-1 III.1.1 Alat...III-1 III.1.2 Bahan...III-1 III.2Diagram Alir...III-2 III.3Pelaksanaan Praktikum...III-2 III.3.1 Pendefinisian status pekerjaan...III-2 III.3.2 Pengamatan Fiducial Mark...III-9 III.3.3 Penentuan Titik Tie Point...III-12 III.3.4 Penentuan Titik Control Tanah (GCP)...III-17 III.3.5 Proses Orthophoto...III-19 III.3.6 Ekstrasi DEM...III-22 III.3.7 Proses Mosaicking...III-35 BAB IV HASIL DAN PEMBAHASAN IV-1
IV.1 Analisa Proses Orthorektifikasi dan DEM Extraction...IV-1 IV.2 Hasil dan Analisa Nilai RMS...IV-1 IV.2.1 Hasil dan Analisa RMS Fiducial Mark Tiap Foto...IV-1 IV.2.2 Hasil dan Analisa RMS tie point...IV-3 IV.2.3 Hasil dan Analisa RMS Ground Control Point (GCP)...IV-4 IV.3 Hasil dan Analisa Hasil Mozaic dengan Google Earth...IV-5 IV.4 Hasil dan Analisa DEM Hasil Ektrasi Foto Udara...IV-7
DAFTAR GAMBAR
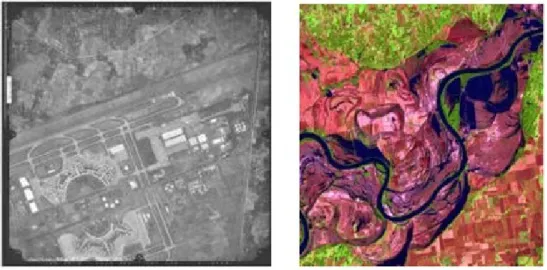
Gambar II.1 Foto Udara Pankromatik (a) dan Foto Udara Inframerah (b)
(Wicaksono, 2009)...II-1 Gambar II.2 Orientasi kamera pada tiga jenis foto udara (Wolf, P. R, 1983)...II-2 Gambar II.3 Tie Point (Tutorial Praktikum GCP, 2014)...II-11 Gambar II.4 Software PCI Geomatika...II-14 Gambar III.1 Diagram Alir...III-2 Gambar III.2 Menu New pada panel OrthoEngine (Kelompok IXA, 2016)...III-3 Gambar III.3 Menu Project pada Processing Step (Kelompok IXA, 2016)...III-3 Gambar III.4 Menu Project Information (Kelompok IXA, 2016)...III-3 Gambar III.5 Menu File To Create (Kelompok IXA, 2016)...III-4 Gambar III.6 Menu Project information (Kelompok IXA, 2016)...III-4 Gambar III.7 Menu Set Projection (Kelompok IXA, 2016)...III-5 Gambar III.8. Menu Earth Model-Datumns (Kelompok IXA, 2016)...III-5 Gambar III.9 Menu UTM Zones (Kelompok IXA, 2016)...III-6 Gambar III.10 Menu Utm Rows (Kelompok IXA, 2016)...III-6 Gambar III.11 Menu Set Project (Kelompok IXA, 2016)...III-7 Gambar III.12 Menu Standard Aerial Camera Calibration Information
(Kelompok IXA, 2016)...III-7 Gambar III.13 Menu pengisian Fiducial Mark photo pertama (Kelompok IXA, 2016)...III-8 Gambar III.14 Menu Processing Step pada OrthoEngine (Kelompok IXA, 2016) ...III-8 Gambar III.15 Menu Database File Selector (Kelompok IXA, 2016)...III-9 Gambar III.16 Menu Open Image (Kelompok IXA, 2016)...III-9 Gambar III.17 Menu orthoengine file name (Kelompok IXA, 2016)...III-10 Gambar III.18 Menu orthoengine file name data input (Kelompok IXA, 2016) ...III-10 Gambar III.19 MenuOpen Image (Kelompok IXA, 2016)...III-10 Gambar III.20 Menu Pengisian Fiducial mark photo pertama (Kelompok IXA, 2016)...III-11
Gambar III.21 Tampilan Zoom dari Penempatan Fiducial Mark (Kelompok IXA, 2016)...III-11 Gambar III.22 Menu GCP/TP Collection pada Processing step (Kelompok IXA, 2016)...III-12 Gambar III.23 Menu Open Image (Kelompok IXA, 2016)...III-13 Gambar III.24 Menu Working dan Reference (Kelompok IXA, 2016)...III-14 Gambar III.25.Persiapan Pemilihan dan Penomoran Titik (Kelompok IXA, 2016) ...III-15 Gambar III.26.Hasil pemasanganTie Point (Kelompok IXA, 2016)...III-16 Gambar III.27.Menu Tie Point Collection (Kelompok IXA, 2016)...III-16 Gambar III.28 Menu Open Image (Kelompok IXA, 2016)...III-17 Gambar III.29 Tampilan Jalur Terbang pada AutoCAD Map 2007 (Kelompok IXA, 2016)...III-17 Gambar III.30 Data Koordinat GPS hasil pengukuran terestris (Kelompok IXA, 2016)...III-18 Gambar III.31 Mencari GCP pada foto (Kelompok IXA, 2016)...III-18 Gambar III.32 JendelaGCP Collection (Kelompok IXA, 2016)...III-19 Gambar III.33 Residual Errorsi (Kelompok IXA, 2016)...III-19 Gambar III.34 Processing Step Ortho Generation (Kelompok IXA, 2016)...III-20 Gambar III.35 Tampilan Ortho Engine Image Production (Kelompok IXA, 2016) ...III-20 Gambar III.36 Semua Image Production sudah mengalami proses Orthophoto (Kelompok IXA, 2016)...III-21 Gambar III.37 Question untuk memulai proses Orthophoto (Kelompok IXA, 2016)...III-21 Gambar III.38 Tampilan Ortho Production Progres (Kelompok IXA, 2016)..III-22 Gambar III.39 Tampilan DEM fron Stereo (Kelompok IXA, 2016)...III-22 Gambar III.40 Menu Generate Epipolar Images (Kelompok IXA, 2016)...III-23 Gambar III.41 Creating Epipolar Images (Kelompok IXA, 2016)...III-24 Gambar III.42 Generate Pairs (Kelompok IXA, 2016)...III-25 Gambar III.43 Menu Automatic DEM Extraction (Kelompok IXA, 2016)...III-26 Gambar III.44 Menu DEM Editing (Kelompok IXA, 2016)...III-27 Gambar III.45 Tampilan hasil DEM (Kelompok IXA, 2016)...III-28
Gambar III.46 Tampilan Geocode Extracted Epipolar (Kelompok IXA,2016)....… III-29
Gambar III.47 Tampilan awal global mapper (Kelompok IXA, 2016)...III-30 Gambar III.48 Tampilan Generic ASCII Text File Import Optionsi (Kelompok IXA, 2016)...III-30 Gambar III.49 Tampilan select coordinate scale/offset (Kelompok IXA, 2016)...… III-31
Gambar III.50 Tampilan Elevation Grid Creation Options (Kelompok IXA, 2016) ...III-32 Gambar III.51 Tampilan Loading ASCII Text File (Kelompok IXA, 2016)...III-32 Gambar III.52 Tampilan Gridding 3D Point (Kelompok IXA, 2016)...III-33 Gambar III.53 TampilanUnknown Projection (Kelompok IXA, 2016)...III-33 Gambar III.54 Tampilan Select Projection for try (Kelompok IXA, 2016)...III-34 Gambar III.55 Tampilan DEM pada global mapper (Kelompok IXA, 2016)..III-34 Gambar III.56 OrthoEngine pada proses Mosaik (Kelompok IXA, 2016)...III-35 Gambar III.57 Menu pada Processing step (Kelompok IXA, 2016)...III-35 Gambar III.58 File Selector untuk membuat nama folder hasil mosaik (Kelompok IXA, 2016)...III-36 Gambar III.59 Tampilan dari menu Automatic Mosaicking (Kelompok IXA, 2016) ...III-36 Gambar III.60 File selector dari citra foto udara mosaic (Kelompok IXA, 2016) ...III-37 Gambar III.61 Tampilan Automatic Mosaicking pada proses Generate Mosaik (Kelompok IXA, 2016)...III-38 Gambar III.62 Proses dari Generate Orthos telah selesai...III-38 Gambar III.63 Tampilan hasil mosaik (Kelompok IXA, 2016)...III-39 Gambar IV.1 Hasil RMS Fiducial Mark foto 14003...IV-1 Gambar IV.2 RMS Fiducial Mark Foto...IV-2 Gambar IV.3 Hasil mosaik foto...IV-5 Gambar IV.4 Mosaik dimasukkan ke Google earth...IV-6 Gambar IV.5 Hasil DEM...IV-8
DAFTAR TABEL
Tabel IV.1 Hasil tie point...IV-3 Tabel IV.2 Hasil GCP...IV-4
BAB I
PENDAHULUAN
I.1 Latar BelakangDewasa ini, kebutuhan akan informasi mengenai posisi suatu obyek di muka bumi semakin diperlukan. Posisi suatu obyek terkait langsung dengan kualitas penyajian informasi spasial yang umumnya direpresentasikan dalam bentuk peta. Sebagaimana kemajuan di bidang ilmu dan teknologi yang semakin pesat, teknologi pemetaan pun sudah sedemikian berkembang, baik dalam teknik akuisisi data maupun proses pengolahan, penyajian, alat serta metode akuisisi data dapat dipilih dengan mempertimbangkan berbagai aspek, salah satunya terkait dengan obyek atau daerah yang akan dipetakan. Fotogrametri merupakan salah satu metode akuisisi data untuk mendapatkan informasi ukuran dan bentuk obyek melalui analisis terhadap rekaman gambar pada film atau media elektronik. Metode fotogrametri telah diaplikasikan dan dikembangkan setelah ditemukannya fotografi pada abad ke-18
Fotogrametri adalah suatu seni,ilmu pengetahuan dan teknologi untuk memperoleh informasi dari suatu proyek melalui proses pencatatan,pengukuran dan interpretasi fotografis. Sedangkan pengertian pemetaan fotogrametri adalah proses pemetaan dengan cara melakukan pengumpulan data dari lapangan dan data dari foto udara, dilanjutkan dengan serangkaian proses sehingga diperoleh peta dalam bentuk peta garis, peta foto dan peta digital. Aplikasi fotogrametri yang paling utama ialah untuk survei dan kompilasi peta topografik berdasarkan pengukuran dan informasi yang diperoleh dari foto udara atau citra satelit. Meskipun fotogrametri merupakan sebagian dari kegiatan pemetaan, tetapi ia merupakan jantung kegiatan tersebut karena fotogrametri merupakan cara deliniasi yang aktual atas detil peta.
Fotogrametri sangat bermanfaat di dalam survei lahan, yaitu dengan menggunakan foto udara sebagai peta dasar untuk menggambarkan batas pemilikan lahan yang ada. Salah satu tahapan dalam fotogrametri digital adalah proses ortorektifikasi dan mozaik foto menggunakan software PCI Geomatica.
I.2 Maksud dan Tujuan I.2.1 Maksud
Praktikum fotogrametri II diadakan dengan maksud agar dapat mengaplikasikan dasar-dasar teori fotogrametri II dan bisa menggunakan software PCI Geomatica. Sehingga diharapkan dapat menggunakan Software PCI Geomatica ver. 10.0, dalam melakukan proses ortorektifikasi pada foto udara serta pembuatan mozaik serta pembuatan DEM
I.2.2 Tujuan
Adapun tujuan dari pelaksanaan praktikum fotogrametri II adalah : 1. Menerapkan dasar teori yang diperoleh dari kuliah fotogrametri II 2. Menyelesaikan tugas praktikum fotogrametri II
3. Agar mahasiswa memahami proses ortho, DEM extraction I.3 Pembatasan Masalah
Agar penulisan Laporan ini tidak menyimpang dari tujuan yang semula direncanakan sehingga mempermudah mendapatkan data dan informasi yang diperlukan, maka penulis menetapkan batasan-batasan sebagai berikut:
1. Proses ortho dan DEM extraction menggunakan software PCi, Geomatica ver 10.0.
2. Dalam praktikum orto dan DEM extraction daerah yang kami jadikan batasan adalah daerah Belitung dengan menggunakan foto udara bernomor 14003, 14004, 14005, 14006, 14007, 14008, 15003, 15004, 15005, 15006, 15007.
I.4 Rumusan Masalah
Permasalahan yang mucul dari latar belakang diatas yang telah dijabarkan sebelumnya adalah sebagai berikut :
1. Bagaimana konsep orthofoto digital ?
2. Bagaimana proses orthorektifikasi pada foto udara menggunakan Software PCI Geomatica ?
I.5 Sistematika Pembuatan Laporan Praktikum
Laporan ini disusun dalam bentuk penyajian data-data dari hasil pengamatan dan analisa foto udara di laboratorium serta gambaran teori secara umum. Oleh
karena itu, agar memudahkan untuk mengetahui isi laporan secara umum, maka sistematika penulisan laporan disajikan seperti berikut ini :
BAB I : PENDAHULUAN
Berisi tentang latar belakang fotogrametri, maksud dan tujuan yang akan dicapai, ruang lingkup materi dan sistematika penulisan laporan.
BAB II : DASAR TEORI
Pada bab ini dijelaskan mengenai dasar-dasar teori tentang fotogrammetri digital yang berkaitan dengan praktikum yang dilakukan
BAB III : PELAKSANAAN PRAKTIKUM
Berisi penjelasan mengenai seluruh kegiatan pelaksanaan praktikum mulai dari pengambilan data sampai tahap penggambaran.
BAB IV : HASIL DAN PEMBAHASAN
Menguraikan hasil dan pembahasan terhadap hasil praktikum.
BAB V : PENUTUP
BAB II
DASAR TEORI
II.1 Foto UdaraFoto udara merupakan rekaman fotografis obyek diatas permukaan tanah yang pengambilannya dilakukan dari udara. Citra atau bayangan yang diperoleh adalah hasil proyeksi sentral. Sinar cahaya matahari yang terpantu loleh obyek dipermukaan tanah atau terrain yang masuk kedalam kamera melewati celah yang ada didalam lensa akan jatuh pada film yang telah dipasang berimpit dengan bidang negatif. Obyek yang direkam dapat berupa bentang alami seperti bukit, lembah, sungai dan telaga maupun hasil perbuatan manusia seperti bangunan-bangunan gedung, perumahan, jalur transportasi, waduk, bendung dan saluran (Purwanto,2015)
II.1.1 JenisFotoUdara
Menurut Wicaksono (2009), jenis foto udara berdasarkan kepekaan film: a. Foto udara Pankromatik
Foto udara dengan mengunakan range panjang gelombang/spectrum yang lebar sehingga didapat warna hitam-putih.
b. Foto udara Inframerah
Gambar II.1 Foto Udara Pankromatik (a) dan Foto Udara Inframerah (b) (Wicaksono,
2009)
Menurut Arifin (2009) Jenis foto udara berdasarkan jenis emulsinya :
a. Black & White monochrome (BW), paling banyak digunakan untuk aplikasi pemetaan, diantara jenis film yang paling murah.
b. Black & White Infrared (BWIR), dapat meminimisasi pengaruh adanya cuaca berkabut saat pemotretan
c. Natural Color, untuk interpretasi pengenalan feature/ unsur dengan ciri warna natural.
d. Color Infrared (CIR), banyak digunakan untuk menejemen sumber daya alam terutama untuk pengenalan feature yang mempunyai kadungan air. II.1.2 Geometri Foto Udara
Geometri foto udara tidak selalu benar-benar tegak sempurna, hal ini dikarenakan beberapa faktor yang mempengaruhi seperti crab, tilt, drift, dan tip. Karena beberapa faktor tersebut menjadikan foto udara bergeometri sendeng (miring atau tidak tegak sempurna) maupun sangat miring. Menurut Wicaksono (2009), foto udara tegak dilakukan dengan posisi pesawat yang membawa kamera melakukan pemotretan secara tegak lurus terhadap permukaan bumi. Foto udara sendeng (miring) dilakukan dengan posisi pesawat yang membawa kamera dengan permukaan bumi memiliki sudut yang agak miring (low oblique). Foto
udara yang dipotret secara miring dapat memperlihatkan garis cakrawala (horizon).
Gambar II.2 Orientasi kamera pada tiga jenis foto udara (Wolf, P. R, 1983)
Foto udara yang bergeometri miring dapat dibuat menjadi tegak sempurna dengan cara merektifikasi foto udara. Kemiringan dapat diatasi dengan rektifikasi, tetapi karena rektifikasi memerlukan biaya yang tidak sedikit maka biasanya rektifikasi jarang dilakukan oleh para penafsir foto udara, kecuali untuk keperluan pemetaan yang membutuhkan ketelitian sangat tinggi (Hadi, 2007).
II.1.3 Skala Foto Udara
Skala foto udara secara merupakan perbadingan antara panjang fokus kamera dengan tinggi terbang pesawat terhadap bidang rata-rata tanah. Atau merupakan jarak antara dua titik difoto dengan jaraknya di tanah (Arifin, 2009). Menurut Wicaksono (2009), skala foto udara secara merupakan perbadingan antara panjang fokus kamera dengan tinggi terbang pesawat terhadap bidang rata-rata tanah. Atau merupakan jarak antara dua titik difoto dengan jaraknya di tanah. Skala foto merupakan berbandingan jarak dua buah obyek di foto dengan jarak yang sesungguhnya di atas tanah. Perbedaannya, pada sebuah peta, skala akan sama disetiap titik karena peta adalah merupakan proyeksi ortogonal dari sebuah kenampakan di permukaan tanah. Sebaliknya, sebuah foto udara adalah hasil suatu proyeksi sentral yang mengakibatkan skala bervariasi sesuai dengan ketinggian titik tersebut terhadap suatu bidang referensi tertentu (Noor, 2012)
II.1.4 Perencanaan Pemotretan Foto Udara
Menurut Sudarsono (2008), tujuan dari pemotretan foto udara adalah untuk memperoleh foto udara yang selanjutnya akan digunakan untuk keperluan proses pemetaan cara fotogrametris atau untuk keperluan interpretasi foto udara. Unsur yang harus diperhatikan dalam pemotretan foto udara antara lain :
1. Pesawat terbang atau wahana foto udara 2. Kamera udara baik metrik ataupun non metrik 3. Film
Tahap pengerjaan foto udara dapat dibagi dalam tahap perencanaan, persiapan, pelaksanaan, dan proses fotografi.
1. Tahap perencanaan
Beberapa persyaratan yang akan digunakan untuk pembuatan peta rencana terbang antara lain :
a. Skala foto udara yang diperlukan b. Batas dan luas daerah pemotretan c. Peta rencana terbang
d. Arah jalur terbang e. Format foto udara f. Kamera yang digunakan g. Besarnya overlap dan sidelap 2. Tahap Persiapan
Peralatan dan bahan-bahan yang harus disediakan untuk pemotretan udara antara lain :
a. Pesawat Terbang
Hal yang perlu diperhatikan dalam pemilihan pesawat terbang untuk pemotretan udara adalah :
Kemampuan terbang
Kecepatan
Daya jelajah
Kestabilan
Beban
b. Kamera Udara
Kamera udara yang digunakan dalam pemotretan udara dapat dibagi dalam tiga macam yakni kamera udara bersiudut normal (Normal Angel), Kamera udara bersudut lebar (Wide Angel), dan kamera udara bersudut sangat lebar (Super Wide Angel).
c. Film
Film yang digunakan harus berkualitas tinggi. Dalam foto udara film yang biasa digunakan adalah film hitam putih pankromatis.
2. Pelaksanaan
Beberapa hal yang perlu diperhatikan dalam pelaksanaan pemotretan udara di lapangan antara lain :
a. Premark harus sudah selesai seluruhnya di lapangan dan premark tersebut harus tampak pada foto hasil pemotretan.
b. Pemotretan dilaksanakan ketika tinggi matahari tidak lebih dari 25°, atau pagi hari pada pukul 07.00 – 10.00 dan sore hari pada pukul 14.00 – 16.00 waktu setempat.
c. Jumlah awan dari setiap foto hasil pemotretan umumnya tidak boleh lebih dari 5%.
d. Variasi tinggi terbang umumnya berklisar 95% - 105% dari tinggi terbang yang direncanakan.
e. Proses Fotografis
Proses fotografis disini adalah berupa tahap pencucian dan penccetakan foto udara hasil perekaman di lapangan.
II.1.5 Sumber-Sumber Kesalahan Foto Udara
Menurut Sudarsono (2008), umumnya foto udara yang didapat dari hasil pemotretan tidak sepenuhnya tegak sempurna. Beberapa kesalahan yang terjadi pada waktu pemotretan udara :
1. Crab, yaitu kesalahan akibat pemasangan kamera yang tidak sempurna.
2. Drift, yaitu kesalahn akibat pengaruh angin sehingga arah terbang tidak sempurna.
3. Tilt, yaitu kesalahan akibat pengaruh angin dari samping sehingga menyebabkan pesawat mengalami kemiringan.
4. Tip, yaitu kesalahan akibat pengaruh angin dari depan atau belakang. Selain kesalahan-kesalahn tersebut, ada beberapa kesalahan lainnya dalam foto udara yaitu :
1. Kesalahan yang terjadi di titik awal
2. Kesalahan akibat penyusutan atau pengembangan bahan fotografi (film dan/atau kertas foto)
3. Distorsi lensa kamera 4. Pengaruh refraksi atmosfer 5. Pengaruh kelengkungan bumi
II.2 Konsep Orthophoto Digital
Ortofoto digital merupakan fotografi udara digital yang memiliki skala yang benar. Sedangkan foto udara konvensional memiliki skala yang tidak benar sehingga memiliki keterbatasan dalam pemanfaatannya untuk keperluan pengukuran. Dalam proses digital, pembuatan ortofoto harus melalui suatu proses yang disebut rektifikasi diferensial atau ortorektifikasi, dimana koreksi skala titik per titik dan pergeseran relief secara normal dari variasi dalam elevasi antara wahana dan topografi lewat jalur penerbangan (Hadi,2007)
Menurut Hadi (2007), kegunaan dari ortofoto digital diantaranya adalah:
1. Dapat digunakan sebagai suatu peta dasar SIG untuk berbagai keperluan antara lain untuk perencanaan kota dan regional, revisi peta-peta topografi, membuat peta-peta-peta-peta tanah, dan studi drainase
2. Biaya lebih hemat dan penayangan fitur-fitur permukaan medan lebih tampak dan mudah dimengerti daripada peta-peta konvensional
3. Ketersediaan data lebih banyak yang dapat diperoleh melalui internet dengan proyeksi UTM
II.2.1 Interior Orientation (Orientasi Dalam)
Dalam konteks fotogrametri, dikenal beberapa sistem koordinat yang berhubungan foto udara, yaitu sistem koordinat foto (model) dan sistem koordinat peta atau tanah. Foto yang diperoleh dari hasil perekaman, memiliki sistem
koordinat piksel sehingga harus ditransformasikan menjadi sistem koordinat foto. Transformasi ini diesbut dengan orientasi dalam (Interior Orientation) (Mensah, 1999; schenk, 2000 dalam Harintaka et al, 2008)
Menurut Sudarsono (2008), tujuan dari orientasi dalam adalah melakukan rekonstruksi berkas sinar pada instrumen fotogrametri. Pada orientasi ini yang dikerjakan antara lain :
1. Memasang diapositif pada piringan penyangga yang ada di stereo plotter
2. Menyetel jarak utama pada masing-masing proyektor sesuai dengan fokus kamera udara yang digunakan
3. Menghilangkan distorsi yang ada.
Selain itu, orientasi dalam juga untuk mengeliminasi kesalahan – kesalahan yang terjadi pada pemotretan udara seperti kesalahan terbang.
II.2.2 Exterior Orientation
Menurut Prasetyo (2007), orientasi eksternal (orientasi luar) adalah orientasi parameter-parameter dari berbagai berkas sinar.Orientasi luar pada dasarnya terbagi atas dua jenis yaitu orientasi relatif dan orientasi absolut.
a. Orientasi relatif
Orientasi relatif merupakan penentuan kemiringan dan posisi relatif dua buah foto pasangan stereo. Dimana sasaran orientasi relatif ini adalah mengorientasikan dua buah foto sehingga setiap pasangan sinar yang sekawan dari dua foto tersebut berpotongan pada ruang (Prahasta: 2008)
b. Orientasi absolut
Menurut Prahasta (2008), dalam orientasi absolut, model 3D relatif yang masih dalam sistem koordinat instrumen (sebarang) di transformasikan ke dalam sistem definitif. Pada tahap ini diperlukan minimal 3 titik kontrol model yang ditentukan sebelumnya (lihat triangulasi udara). Proses orientasi absolut sebenarnya merupakan penyamaan antara koordinat model dengan koordinat tanah. Sehingga dalam orientasi ini akan terdapat proses leveling (penegakan) dan
scaling (penyekalaan). Bila dilakukan secara numerik, maka yang rumus yang digunakan adalah transformasi sebangun 3D
II.3 Kalibrasi Kamera
Kalibrasi kamera adalah proses menentukan parameter internal dari sebuah kamera. Parameter internal dibutuhkan untuk dapat merekonstruksi ulang berkas-berkas sinar pada saat pemotretan dan untuk mengetahui besarnya kesalahan sistematik dari sebuah kamera.
Proses kalibrasi ini dilakukan untuk mencari parameter intrinsik dan parameter ekstrinsik menggunakan image 2D suatu objek, yang dikorespondensikan dengan koordinat 3D objek tersebut, dengan kata lain korespondensi ini merupakan transformasi antar sistem koordinat. Beberapa parameter tersebut antara lain, focal lenght, titik pusat koordinat, resolusi, rotasi kamera, ditorsi lensa. Untuk keperluan fotogrametri teliti posisi tanda tepi, bersama-sama dengan titik tengah foto, panjang fokus dan distorsi lensa harus ditentukan dengan cara kalibrasi kamera (Wahyunanto et al;2015)
Menurut Kusumadarma (2008), selama kalibrasi kamera, kita akan memperoleh unsur-unsur dari orientasi dalam, yang terdiri dari :
1. Jarak Utama /Principal Distance
Jarak utama adalah jarak tegak lurus antara titik pusat lensa (titik fokus) dengan bidang proyeksi kamera CCD (Charge-Coupled Device) atau CMOS (Complimentary Metal-oxide Semiconductor) dalam kamera digital, atau film dalam kamera analog). Umumnya dari metadata sebuah foto digital dapat diketahui panjang fokusnya, namun nilainya belum tentu sama dengan jarak utama yang diperlukan dan merupakan nilai pendekatan dari pabrik pembuat kamera tersebut. Untuk pekerjaan fotogrametri dibutuhkan nilai yang pasti dari jarak utama ini, karena akan berhubungan dengan hasil pengukuran obyek, sehingga diperlukan kalibrasi kamera.
2. Posisi titik utama foto ( Xp, Yp )
Titik utama adalah titik hasil proyeksi tegak lurus titik pusat perspektif (titik pusat proyeksi) pada bidang foto. Posisi ini dinyatakan dengan
Xp dan Yp yang merupakan koordinat titik utama dalam sistem koordinat foto. Sistem koordinat foto adalah sistem kordinat yang berpangkal pada titik pusat foto, dimana sumbu X positif adalah garis lurus yang menghubungkan dua titik yang berhadapan pada sebuah foto (sejajar arah jalur pemotretan). Sedangkan sumbu Y positif adalah tegak lurus berlawanan arah jarum jam dari sumbu X positif.
3. Distorsi lensa
Distorsi lensa dapat menyebabkan bergesernya titik citra pada foto dari posisi yang sebenarnya, sehingga akan memberikan ketelitian pengukuran yang kurang baik. Distorsi lensa tidak akan mempengaruhi kualitas ketajaman foto yang dihasilkan. Namun untuk pekerjaan fotogrametri, besarnya distorsi tak dapat diabaikan. (Fryer, 1989 dalam Atkinson, 1996). Distorsi lensa diklasifikasikan menjadi dua macam, yaitu distorsi radial dan distorsi tangensial (decentering).
a. Distorsi radial
Distorsi radial merupakan “aberasi” lensa yang menyebabkan sinar datang yang masuk melalui lensa kamera mengalami deviasi setelah melalui titik pusat proyeksi lensa. Deviasi ini terjadi akibat tidak sempurnanya komposisi lensa. Distorsi lensa akan mengakibatkan pergeseran bayangan ke arah radial terhadap titik utama.
b. Distorsi tangensial
Semua elemen dalam sistem lensa, idealnya harus diatur sejajar dengan sumbu optis dari seluruh sistem lensa. Pergeseran vertikal ataupun rotasi pada elemen lensa dari susunan yang sempurna akan mengakibatkan pergeseran geometrik dari foto, yang dikenal sebagai distorsi tangensial. Distorsi tangensial mempunyai komponen radial dan tangensial.
II.4 Titik Kontrol
Titik kontrol pada fotogrametri atau disebut dengan kontrol medan terdiri dari sembarang titik-titik yang posisinya diketahui pada suatu sistem koordinat
rujukan tempat objek dan juga dapat teridentifikasi di foto udara. Didalam fotogrametri, tempat suatu objek adalah di permukaan tanah dan berbagai macam sistem koordinat medan dapat digunakan untuk untuk menentukan letak suatu titik (Wolf, 1983).
Titik kontrol tanah lebih dikenal dengan istilah GCP (Ground Control Point). GCP adalah suatu titik berupa benchmark yang ada dibumi yang bergeoreferensi sehingga diketahui informasi mengenai koordinat dan tinggi titik tersebut. Menurut Ardianto (2014), ttitik kontrol tanah adalah lokasi yang berkoordinat berupa sejumlah titik yang diperlukan untuk kegiatan mengkoreksi data dan memperbaiki keseluruhan citra yang akhirnya disebut sebagai proses rektifikasi.
Menurut Wolf (1983), titik kontrol dapat diklasifikasikan menjadi dua yaitu titik kontrol mendatar (horizontal) dan titik kontrol tegak (vertikal). Titik kontrol memedatar adalah titik di ruaang yang diketahui dalam hubungannya dengan rujukan mendatar / horizontal sedangkan titik kontrol vertikal merupak titik kontrol yang memiliki nilai ketinggian dan berhubungan dengan rujukan tegak.
II.5 Fiducial Mark
Digunakan untuk keperluan orientasi foto di instrumen fotogrametri.Pada tiap foto udara umumnya diberi empat atau delapan tanda fidusial. Tanda ini terletak pada sudut foto atau pada bagian tengah foto. Apabila terletak pada sudut foto, pada umumnya berupa garis silang yang mengarah ke sudut lain di hadapannya. Apabila terletak pada bagian tengah tepi foto, pada umumnya berupa setengah anak panah. Kegunaan dari tanda ini adalah untuk menentukan titik prinsipil foto, yaitu dengan cara menarik garis dari dua tanda fidusial yang berhadapan. Titik potong dari dua garis ini merupakan titik prinsipiil foto. Titik prinsipil ini berguna untuk mencari daerah tampalan (tumpang tindih) pada foto udara selanjutnya (Wolf, 1983).
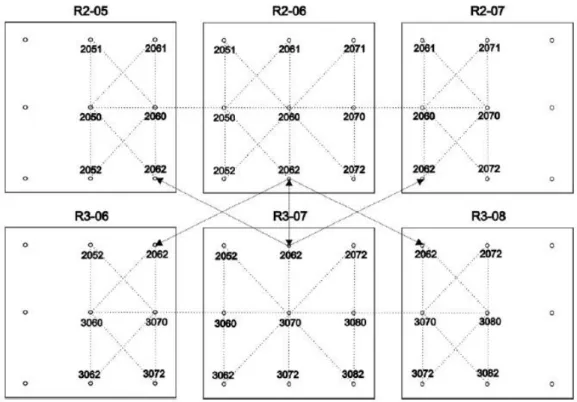
II.6 Tie Point
Titik penerus yang mengikat jalur-jalur foto disebut titik ikat (tie point) (Wolf, 1983). Dalam pekerjaan fotogrametri ada tahapan pekerjaan yang sangat
penting yaitu triangulasi udara (aerial triangulation). Pekerjaan pemindahan titik adalah tahapan pertama yang tidak dapat diabaikan yaitu sistem penomoran. Penomoran titik adalah hal yang sangat diperhatikan karena akan sangat berkaitan dengan ketelitian dan kualitas hubungan antar foto. Ada kaidah-kaidah yang telah baku dalam penomoran ini yang bermaksud untuk dapat dengan mudah dalam pengontrolan apabila ada kesalahan dapat dengan mudah untuk melacak titik itu ada pada foto yang mana.
Berhati-hatilah dalam pemilihan, penomoran dan pengamatannya karena sekali salah, pada program ini agak sulit untuk memperbaikinya. Harus benar-benar penuh konsentrasi, sebelum titik kontrol tanah diberikan pada blok ini, belum ada petunjuk apakah titik yang diamati sudah benar atau tidak. Terutama dalam penomoran dan pengamatannya. Dibawah ini akan ada penjelasan lebih lanjut tentang pekerjaan ini.
Gambar II.3 Tie Point (Tutorial Praktikum GCP, 2014)
II.7 Mozaik Foto Udara
Mozaik foto udara merupakan gabungan dari dua atau lebih foto udara yang saling bertampalan sehingga terbentuk paduan gambar yang berkesinambungan
dan menampilkan daerah yang lebih luas (Wolf, 1983). Penggabungan dilakukan dengan memotong dan menyambungkan bagian-bagian foto yang overlap atau sidelap. Mozaik udara umumnya dirakit dari foto udara vertikal, namun kadang-kadang juga dirakit dari foto miring atau fototerestris. Jika dibuat dengan baik, akan memperlihatkan penampilan seperti suatu foto tunggal yang sangat besar.
Ditinjau dari teknik pembuatannya, Wolf (1983) menyebutkan ada tiga jenis mosaik, yaitu mosaik terkontrol, tidak terkontrol, dan semi terkontrol. Mosaik terkontrol adalah mosaik yang dibuat dari foto yang telah direktifikasi sehingga semua foto telah mempunyai skala yang sama. Mosaik tidak terkontrol adalah mosaik yang dibuat dari foto tegak yang belum direktifikasi serta belum diseragamkan skalanya. Mosaik semi terkontrol adalah mosaik yang disusun dengan menggunakan foto udara yang mempunyai beberapa titik kontrol, tetapi foto tersebut tidak terektifikasi dan mempunyai skala yang tidak seragam.
II.8 Digital Elevation Model
Produk primer dari kerja fotogrametri digital adalah model elevasi digital (DEM), citra terektifikasi-orto atau citra orto (orthoimages) dan fitur-fitur terekstaksi (vektor). Produk yang paling popular adalah DEM. DEM adalah file digital yang berisi elevasi medan yang sesuai dengan posisinya di lapangan secara tetap menempati interval horizontal (USGS, 2001 dalam Hadi 2007).
DEM biasanya diperoleh dengan cara interpolasi peta kontur digital dengan menggunakan perangkat lunak tertentu berbasis raster. DEM digunakan untuk menampilkan gambar/peta 3-tiga dimensi yang berupa kemiringan lereng, aspect (arah kemiringan), dan profil-profil medan antara titik-titik terpilih. Salah satu proses fundamental dalam fotogrametri adalah mengidentifikasi dan mengukur titik-titik yang berhubungan pada dua atau lebih citra/foto udara yang bertampalan (Hadi, 2007).
Proses pembuatan DEM umumnya dimulai dari pembuatan peta topografi yang terproyeksi dengan baik. Selanjutnya, garis kontur, titik ketinggian dan batas wilayah perairan darat dan garis pantai dikonversi ke layer vektor digital dengan koordinat yang jelas. Selanjutnya, proses interpolasi dengan algorithma tertentu akan menghasilkan layer raster/grid. DEM juga dapat dinyatakan dengan grid
teratur, jaringan triangulasi (TIN/Triangluation Irreguler Network) dan kontur. Ukiran file DEM akan tergantung pada skala dan interval kontur yang dijadikan sebagai sumber, format file dan ketelitian spasial yang diinginkan (Prasetyo,2014).
II.9 Konsep Pembentukan Dem Hasil Ekstrasi Foto Udara
Perkembangan teknologi pengolahan data fotogrametri semakin pesat. Hal ini dibuktikan dengan adanya hasil pengolahan data fotogrametri khususnya data foto udara yang dapat memenuhi berbagai macam kebutuhan. Salah satu produk hasil olahan data foto udara adalah data Digital Elevation Model (DEM). DEM merupakan informasi ketinggian suatu wilayah dipermukaan bumi yang disimpan dalam format digital berupa bentuk raster berbasis pixel atau vektor yang berbasis poligon (Trisakti, 2010). Secara umum, DEM merepresentasikan bentuk topografi permukaan bumi dengan titik-titik 3D yang disimpan secara digital. Selain data foto udara, DEM juga dapat diperoleh dari teknik data LiDAR.
Terdapat beberapa metode dalam fotogrametri untuk pengolahan data foto udara agar menghasilkan DEM yaitu dengan cara stereomathing dan stereoplotting. Stereoplotting adalah metode pengumpulan data vektor yang memiliki nilai ketinggian (z) yang dapat dilakukan dengan cara otomatis atau interaktif. Stereoplotting interaktif dilakukan dengan cara digitasi 3D pada foto udara stereo. Diperlukan nilai Exterior Orientation Parameter (EOP) agar dapat dilakukan stereoplotting. Nilai EOP dapat diperoleh dengan dua cara yaitu melalui tahapan Aerial Triangulation (AT) dan melalui tahapan Relative Orientation (RO). Nilai EOP yang diperoleh melalui tahapan AT memerlukan software Bundle Adjustmen I seperti PCI Geomatica, Inpho dan sebagainya. Ada kemudahan tersendiri jika melakukan pembuatan DEM dengan tahapan AT yaitu nilai Exterior Orientation Parameter (EOP) dapat diperoleh tanpa melakukan tahapan Relative Orientation (RO). Nilai EOP yang diperoleh melalui tahapan AT merupakan hasil model perhitungan Bundel Adjustment. Sedangkan nilai EOP yang diperoleh melalui tahapan RO harus melalui beberapa proses yaitu interiororientation, relative orientation dan absolute orientation. Software yang digunakan untuk melakukan proses RO salah satunya adalah software DAT/EM
Summit Evolution. Selain untuk menghasilkan nilai EOP, software DAT/EM Summit Evolution merupakan salah satu software yang digunakan untuk menghasilkan DEM dengan cara stereoplotting. Perlu dilakukan penelitian untuk mengetahui tingkat keakuratan DEM hasil stereoplotting pada foto udara.
II.10 Software PCI Geomatica
PCI Geomatica adalah software pengolan citra dan GIS yang dapat berintegrasi dengan data penginderaan jauh, fotogrametri, dan Penggunaan tampilan peta secara benar dengan batasan ilmu kartografi. (Warapangesti, 2015)
Gambar II.4 Software PCI Geomatika
Geomatica atau yang lebih dikenal dengan nama PCI Geomatica merupakan software buatan perusahaan asal Kanada, PCI Geomatica, yang saat ini merupakan software yang sangat populer untuk mengolah data citra satelit, terutama data citra satelit resolusi tinggi seperti QuickBird, WorldView-1, WorldView-2, GeoEye-1, Ikonos, Pleiades, SPOT 6, dan berbagai jenis citra resolusi tinggi lainnya. Kelebihan utamanya dalam pengolahan data citra satelit
resolusi tinggi adalah terdapatnya berbagai jenis metode yang dapat digunakan untuk menyelesaikan pekerjaan kita mengolah data citra satelit resolusi tinggi, mulai dari metode Satellite Orbital Modelling dan Rational Functions yang umumnya digunakan untuk mengolah data citra satelit yang mempunyai informasi orbital. Selain itu terdapat metode Polynomial dan Thin Plate Spline sebagai metode lain yang dapat membantu jika hasil pengolahan data citra satelit dengan metode Satellite Orbital Modelling dan Rational Functions kurang memuaskan.
II.11 Software PCI Geomatica
Global Mapper adalah software geographic information system (GIS) software keluaran globalmapper.com yang dapat dijalankan Microsoft Windows. Software GIS ini compatible dengan ESRI, geomedia, Manifold System, dan produk GIS map info GIS. Global Mapper menangani tentang vektor, raster, and data elevasi dan menyediakan tampilan konversi, dan feature umum GIS lainnya.
Kegunaan Utama Global Mapper memiliki banyak fungsi antara lain: a. Generate kontur ke berbagai interval
b. Generate watershed atau daerah aliran sungai secara otomatis
c. Melihat data DEM dengan berbagai tampilan seperti atlas, hilshade, aspect, slope dan lain-lain
Kelebihan Global Mapper v.12.00 (global mapper.com, 2012) :
a. Mampu menampilkan raster, elevasi dan vektor dataset (sekarang termasuk GeoPDF)
b. Mengconvert, mengedit, mosaik, reproject, cetak, track GPS c. Memanfaatkan fungsi GIS pada dataset Anda
BAB III
PELAKSANAAN PRAKTIKUM
III.1 Alat dan BahanIII.1.1 Alat
2. Personal komputer dengan spesifikasi
a. Sistem Operasi : Microsoft Windows 10 b. Processor : Inter Core i3
c. RAM : 6 GB
3. Software PCI Geomatika 10.3 III.1.2 Bahan
1. Foto udara 11 buah 2. Data GCP Makasar 3. Indeks Jalur terbang
III.2 Diagram Alir
Gambar III.5 Diagram Alir
III.3 Pelaksanaan Praktikum
III.3.1 Pendefinisian status pekerjaan 1. Mengaktifkan Orthoengine
2. Memilih File > New
Gambar III.6 Menu New pada panel OrthoEngine (Kelompok IXA, 2016)
3. Memilih Project maka akan muncul tampilan seperti berikut :
Gambar III.7Menu Project pada Processing Step (Kelompok IXA, 2016) 4. Klik maka akan muncul Project Information
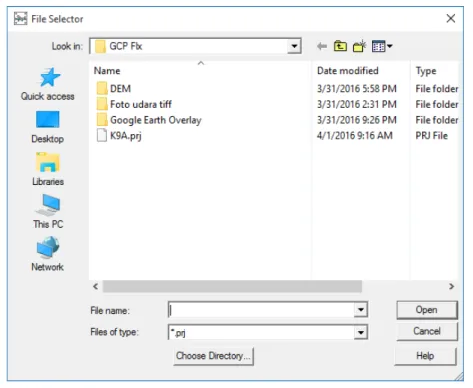
5. Pilih Browse maka akan muncul tampilan seperti berikut. Pilih tempat dan nama file akan disimpan
Gambar III.9 Menu File To Create (Kelompok IXA, 2016)
6. Pada File Name ketik kelompok IXA.
Gambar III.10 Menu Project information (Kelompok IXA, 2016)
7. Pada kolom Name ketik fiducial Mark.
8. Pada Kolom Description ketik Penentuan Fiducial Mark dan Konversi Data.
9. Memilih Aerial Photography pada Math Modelling Method 10. Pada Camera Type pilih Standard Aerial.
11. Pada Exterior orientation pilih Compute from GCP to Tie Point 12. Klik OK, maka akan muncul tampilan Set Projection.
Gambar III.11 Menu Set Projection (Kelompok IXA, 2016)
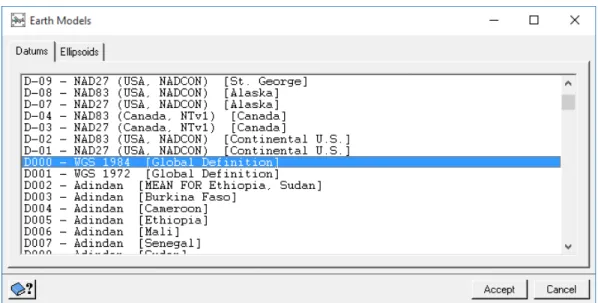
13. Pilih UTM, pada Earth Model pilih WGS 84 pada pilihan datum
Gambar III.12. Menu Earth Model-Datumns (Kelompok IXA, 2016)
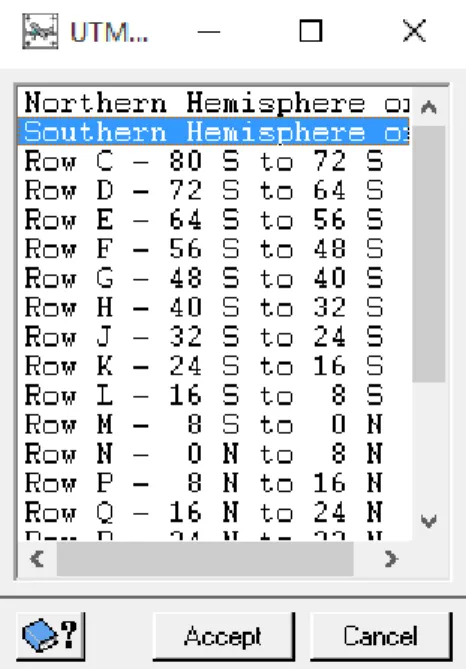
Gambar III.13 Menu UTM Zones (Kelompok IXA, 2016)
Gambar III.14 Menu Utm Rows (Kelompok IXA, 2016)
Gambar III.15 Menu Set Project (Kelompok IXA, 2016)
16. Ketik 0.5 pada kolom Output pixel spacing, dan kolom output line spacing akan terisiotomatis.
17. Pada GCP Projection Set GCP Projection based on Output Projection, maka Earth Model akan terisiotomatis.
18. Klik accept akan muncul tampilan seperti berikut
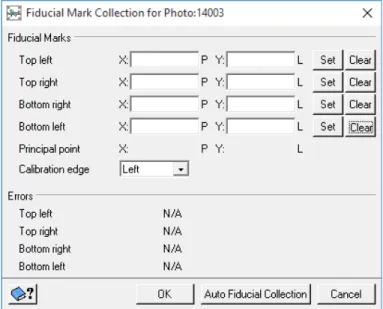
Gambar III.16 Menu Standard Aerial Camera Calibration Information (Kelompok IXA,
19. Diisi seperti berikut, lalu klik accept
Gambar III.17 Menu pengisian Fiducial Mark photo pertama (Kelompok IXA, 2016)
20. Selanjutnya adalah pilih menu kedua yaitu Data Input
Gambar III.18 Menu Processing Step pada OrthoEngine (Kelompok IXA, 2016)
21. Klik ikon , maka akan muncul Open Image
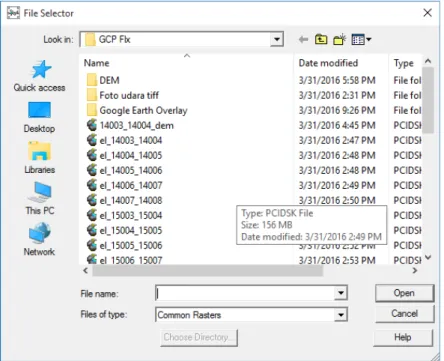
22. Pertama pilih Uncorect image > New Image. Pada kotak Files of type: pilih PCIDSK (.PIX). Pada file pilih foto yang diinginkan.
Gambar III.19 Menu Database File Selector (Kelompok IXA, 2016)
23. Klik button open maka file itu akan mengisi panel open image. Lakukan pada file lainnya, sehingga seluruh foto yang dibutuhkan masuk semuanya pada panel open image.
Gambar III.20 Menu Open Image (Kelompok IXA, 2016)
24. Apabila foto telah dikumpulkan, double klik pada foto yang akan diolah. III.3.2 Pengamatan Fiducial Mark
Gambar III.21 Menu orthoengine file name (Kelompok IXA, 2016)
2. Kemudian open image dari folder pix pada menu di bawah ini
Gambar III.22 Menu orthoengine file name data input (Kelompok IXA, 2016)
3. Sorot file 14003 pada panel Open Image, lalu klik dua kali atau klik Button Open maka akan muncul panel Fiducial Mark dan panel Photo seperti dibawah ini:
Gambar III.24 Menu Pengisian Fiducial mark photo pertama (Kelompok IXA, 2016)
4. Memeriksa button kanan atas yang bertuliskan working berwarna merah tetapi apabila button ini bertuliskan reference maka perlu di klik dulu button ini sampai button ini working berwarna merah dan harus diulangi mengklik atau memilih ikon collect fiducial marks pada panel input. 5. Mengarahkan pointer pada fiducial mark posisi top left lalu klik zoom (+)
6. Menempatkan pointer di tengah-tengah fiducial mark, bila telah pasti dilanjutkan dengan mengklik button set yang berada pada panel fiducial mark collection, melakukan langkah tersebut untuk titik fiducial mark lainnya.
7. Setelah selesai mengamati keempat fiducial mark, maka pada panel fuducial mark collection akan muncul informasi errors. Apabila errors kurang dari 0,020 mm dan 1.0 P untuk setiap titiknya, lalu klik button accept, tetapi apabila lebih maka diulangi pada titik yang errors-nya besar. 8. Panel fiducial mark akan menghilang dari layar.
9. Dilanjutkan untuk foto yang lainnya dengan langkah seperti di atas. III.3.3 Penentuan Titik Tie Point
1. Pada menu processing step memilih GCP/TP Collection. Dengan tampilan seperti di bawah
Gambar III.26 Menu GCP/TP Collection pada Processing step (Kelompok IXA, 2016)
2. Klik tool Open a new or existing Photo ( ), lalu akan muncul panel Open image yang berisi nama-nama file foto
Gambar III.27 Menu Open Image (Kelompok IXA, 2016)
3. Pilih foto yang akan dikerjakan, pemilihan foto dilakukan satu persatu. Kemudian klik open. Pilih 1 lagi foto kemudian klik open. Klik close apabila foto telah selesai dibuka dan akan kembali pada tool GCP/TP Collection.
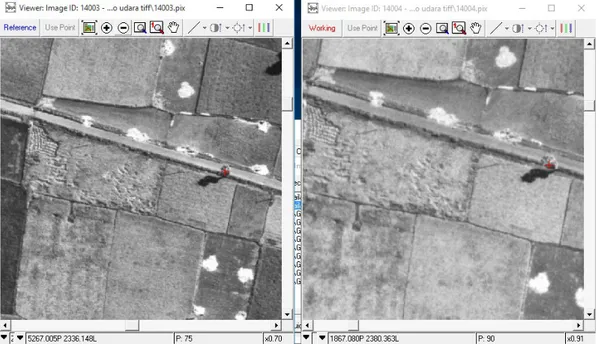
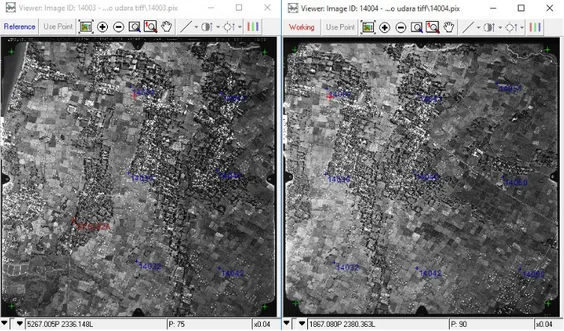
4. Di bawah ini merupakan gambar foto yang telah dibuka, pada pojok kiri atas setiap panel foto terdapat teks Working dan pada foto lainnya tertera Reference. Perubahan ini dilakukan dengan cara menyorotkan pointer dan klik maka Working akan berubah menjadi Reference begitu juga sebaliknya. Bila Working aktif pada sebuah panel foto, merupakan tanda bahwa photo current pada panel Collect tie point
Gambar III.28 Menu Working dan Reference (Kelompok IXA, 2016)
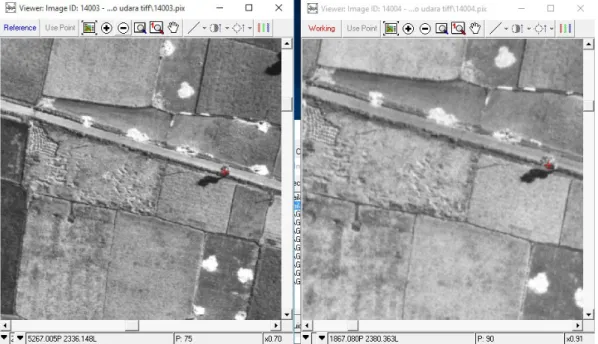
5. Saat akan melakukan pemilihan dan pengamatan ,terlebih dahulu menampilkan foto yang akan diamati.
6. Memperhatikan pojok kanan atas dari panel Photo ID, yaitu tombol Reference dengan warna biru atau Working dengan warna merah. Pilih Working, untuk mengaktifkan panel Collection Tie Point, klik titik 14003 pada foto 14004, koordinat akan tertulis di tabel Collection Tie Point, selanjutnya pada panel Photo ID 14004 dan yang lainnya, biarkan tombol dalam keadaan Reference, apabila titik yang dimaksud telah dipilih dilanjutkan dengan mengkliknya.
Gambar III.29.Persiapan Pemilihan dan Penomoran Titik (Kelompok IXA, 2016)
7. Apabila semua titik telah diamati, klik tombol Accept pada panel Tie Point Collection supaya seluruh hasil pengamatan terekam.
8. Selanjutnya mengamati titik yang lainnya. Apabila telah selesai mengamati titik pada foto yang ditampilkan, dilanjutkan dengan foto yang lainnya, misalnya foto 14003 dan 14004 di close dan membuka foto 14004 dan 14005, begitu seterusnya.
9. Menyimpan file project dengan cara save as dengan nama yang diinginkan.
Gambar III.30.Hasil pemasanganTie Point (Kelompok IXA, 2016)
III.3.4 Penentuan Titik Control Tanah (GCP)
1. Klik icon Collect GCPs Manually ( ). Lalu akan muncul tampilan jendela Open Image seperti di bawah ini.
Gambar III.32 Menu Open Image (Kelompok IXA, 2016)
2. Memilih salah satu foto tersebut, contoh foto 14003 lalu mencari GCP yang terdapat di foto tersebut. Dengan referensi di file AutoCAD yang telah tersedia untuk memudahkan dalam mencari GCP yang terdapat di foto tersebut.
Gambar III.33 Tampilan Jalur Terbang pada AutoCAD Map 2007 (Kelompok IXA,
3. Menandai GCP pada foto tersebut dan klik Use Point lalu memberi definisi nama dan mengisi koordinat GCP tersebut dengan referensi file excel yang tersedia, lalu klik Accept.
Gambar III.34 Data Koordinat GPS hasil pengukuran terestris (Kelompok IXA, 2016)
4. Mencari GCP pada foto yang terdapat GCP
Gambar III.35 Mencari GCP pada foto (Kelompok IXA, 2016)
Gambar III.36 JendelaGCP Collection (Kelompok IXA, 2016)
Gambar III.37 Residual Errorsi (Kelompok IXA, 2016)
6. Melakukan langkah tersebut untuk foto lain yang terdapat GCP 7. Lalu menyimpan file foto tersebut.
III.3.5 Proses Orthophoto
1. Membuka software PCI Geomatica. 2. Memilih toolbar Ortho Engine
3. Memilih menu file, pilih project yang akan dikerjakan. 4. Pada processing step, pilih Ortho Generation
Gambar III.38 Processing Step Ortho Generation (Kelompok IXA, 2016)
5. Memilih toolbar ortho generation ( ), akan muncul :
Gambar III.39 Tampilan Ortho Engine Image Production (Kelompok IXA, 2016)
6. Memilih semua citra foto udara yang akan ditransfer untuk diproses Orthophoto.
Gambar III.40 Semua Image Production sudah mengalami proses Orthophoto
(Kelompok IXA, 2016)
7. Setelah semua citra foto udara selesai ditransfer, klik menu Generate Orthos.
Gambar III.42 Tampilan Ortho Production Progres (Kelompok IXA, 2016)
III.3.6 Ekstrasi DEM
1. Membuka OrthoEngine
2. Pada processing step memilih DEM from stereo
Gambar III.43 Tampilan DEM fron Stereo (Kelompok IXA, 2016)
3. Klikicon create epipolar image ( ) 4. Akan muncul panel generate epipolar image
Gambar III.44 Menu Generate Epipolar Images (Kelompok IXA, 2016)
5. Pada left image, memilih foto 14004 dan pada right image memilih foto 14005. Pada Channels pilih channels 1.
Gambar III.45 Creating Epipolar Images (Kelompok IXA, 2016)
Gambar III.46 Generate Pairs (Kelompok IXA, 2016)
7. Klik OK, lalu save setup. Kemudian di close.
8. Klik icon extract DEM automatically ( ) pada orthoengine.
Gambar III.47 Menu Automatic DEM Extraction (Kelompok IXA, 2016)
10. Klik Extract DEM.
11. Klik icon manually edit generate DEM ( )
12. Pada File masukkan foto 14004 dan 14005. Pada layer pilih yang kedua. Pada DEM special values, untuk Failure ditulis -100, pada background ditulis -150.
Gambar III.48 Menu DEM Editing (Kelompok IXA, 2016)
13. Klik new mask layer.
14. Klik mask failed pixel, akan muncul tampilan seperti di bawah ini yang menandakan banyak kesalahan.
Gambar III.49 Tampilan hasil DEM (Kelompok IXA, 2016)
15. Selanjutnya pada filtering and interpolation pilih interpolate.
16. Pilih use mask, kemudian klik apply lalu akan muncul proses. Setelah itu close.
17. Klik icon Geocode Extract Epipolar DEM ( ), input file DEM yang tadi disimpan.
Gambar III.50 Tampilan Geocode Extracted Epipolar (Kelompok IXA,2016)
18. Pada Failure value diisi -100. Pada backgroung value diisi -150. Pada output DEM, pilih tempat untuk menyimpan outputnya. Pada file spacing diisi 5.
19. Klik Geocode DEM, hasilnya akan berformat .txt
20. Selanjutnya dimasukkan ke global mapper untuk membaca file DEM dengan format .txt.
Gambar III.51 Tampilan awal global mapper (Kelompok IXA, 2016)
Gambar III.52 Tampilan Generic ASCII Text File Import Optionsi (Kelompok IXA,
2016) 22. Pilih Select Coordinate Offset/Scale .
Gambar III.53 Tampilan select coordinate scale/offset (Kelompok IXA, 2016)
23. Klik OK juga pada tampilan Generic ASCII Text File Import Options 24. Klik OK
Gambar III.54 Tampilan Elevation Grid Creation Options (Kelompok IXA, 2016)
25. Akan muncul proses seperti berikut :
Gambar III.56 Tampilan Gridding 3D Point (Kelompok IXA, 2016)
26. Klik OK
Gambar III.57 TampilanUnknown Projection (Kelompok IXA, 2016)
Gambar III.58 Tampilan Select Projection for try (Kelompok IXA, 2016)
28. Akan muncul tampilan seperti berikut :
III.3.7 Proses Mosaicking 1. Membuka OrthoEngine
Gambar III.60 OrthoEngine pada proses Mosaik (Kelompok IXA, 2016)
2. Pada Processing step pilih Mosaic
Gambar III.61 Menu pada Processing step (Kelompok IXA, 2016)
3. Memilih toolbar Define mosaic area ( )
4. Membuat file name (Mosaic) folder dari hasil mosaik pada file selector dengan save as type (TIFF Files), lalu klik save.
Gambar III.62 File Selector untuk membuat nama folder hasil mosaik (Kelompok IXA,
2016)
5. Memilih proses Automatic mosaicking ( )
6. Pada menu File Options, pilih file yang telah diproses Define Mosaic Area klik Open
Gambar III.64 File selector dari citra foto udara mosaic (Kelompok IXA, 2016)
Gambar III.65 Tampilan Automatic Mosaicking pada proses Generate Mosaik
(Kelompok IXA, 2016)
8. Hasil mosaik
BAB IV
HASIL DAN PEMBAHASAN
IV.1 Analisa Proses Orthorektifikasi dan DEM ExtractionOrtofoto merupakan proses rektifikasi diferensial dengan menggunakan alat stereo ortofoto. Input yang digunakan adalah model (foto stereo). Rektifikasi diferensial adalah proses peniadaan pergeseran letak gambar oleh kesedengan fotografik dan relief.
IV.2 Hasil dan Analisa Nilai RMS
Setelah melakukan praktikum Orthorektifikasi dengan menggunakan software PCI Geomatica, dihasilkan RMS (data error) untuk setiap tie point dan ground control point (GCP). Berikut adalah hasil RMS dari pelaksanaan praktikum orthorektifikasi kelompok VII A.
IV.2.1 Hasil dan Analisa RMS Fiducial Mark Tiap Foto
Gambar IV.69 RMS Fiducial Mark Foto
Dalam pengikatan fiducial mark tiap foto, terdapat kesalahan yang biasa disebut RMS (Root Mean Sqare). RMS merupakan parameter yang digunakan untuk mengevaluasi nilai hasil dari pengamatan/ pengukuran terhadap nilai sebenarnya atau nilai yang mendekati benar. Dari hasil praktikum, nilai RMS fiducial mark tiap foto ≤ 0,013. Maka hasil praktikum orto memenuhi toleransi yang diberikan yaitu sebesar 1 Pixel.
Fiducial mark digunakan untuk menentukan titik utama foto (principal point). Dengan begitu, semakin kecil nilai RMS nya maka akan semakin tepat titik utama yang dianggap benar di tiap fotonya. Sedangkan semakin besar nilai RMS maka akan semakin jauh dari titik utama yang dianggap benar di tiap benar.
IV.2.2 Hasil dan Analisa RMS tie point
Dari data yang didapat diatas, setiap foto memiliki 9 tie point kecuali foto tepi yang hanya memiliki 6 tie point. Hal ini sesuai dengan teori Van Gruber. Tie point ini berguna untuk menyatukan foto satu dengan foto yang lainnya agar foto tersebut dapat bertampalan dengan baik. Kualitas hubungan antar foto ini ditunjukan oleh nilai RMS pada tie point. Semakin kecil nilai RMS pada tie point maka semakin bagus hasil foto yang bertampalan. Sedangkan semakin besar nilai RMS pada tie point maka foto satu dengan lainnya semakin jauh dari tempat yang seharusnya bertampalan pada dua foto tersebut. Selain itu RMS juga menunjukkan hasil koreksi geometrik. Jadi semakin kecil RMS maka ketelitian suatu foto semakin bagus. Sedangkan semakin besar RMS maka ketelitian suatu foto semakin jelek.
Jumlah tie point adalah 87 titik dengan RMS X 0.35, RMS Y 0.41. Dari hasil yang sudah didapatkan maka hasil ini memasuki toleransi dari praktikum ortho yaitu 1 pixel.
IV.2.3 Hasil dan Analisa RMS Ground Control Point (GCP)
Tabel IV.2 Hasil GCP
Dari 11 foto yang diamati terdapat 4 buah GCP yang ditemui. Yaitu GCP pada foto 14003, 15003, 14008, 14007, dan 15007. Pada foto 14003 terdapat GCP dengan nomor GD 52A. Pada foto 15003 terdapat 2 buah GCP yaitu GD 52A dan GD 52. Kemudian pada foto 14008 terdapat GCP dengan nomor GD 51 dan BP 02A. Pada foto nomor 14007 terdapat GCP dengan nomor BP 02A. Pada foto nomor 15007 terdapat GCP dengan nomor GD 51 dan BP 02A.
Hasil RMS dari GCP pada 11 foto adalah RMS X 0.30 dan RMS Y 0.20. Dari hasil yang sudah didapatkan maka hasil ini memasuki toleransi dari praktikum ortho yaitu 2 pixel. Nilai RMS pada titik GCP dipengaruhi oleh berapa banyak titik GCP yang digunakan dalam proses ortho ini. Semakin sedikit titik GCP yang digunakan maka nilai RMS menjadi diluar toleransi dan semakin banyak titik GCP yang digunakan maka nilai RMS semakin bagus didalam toleransi. Selain itu hasil RMS GCP bergantung pada seberapa tepat kita melakukan proses penempatan GPS.
IV.3 Hasil dan Analisa Hasil Mozaic dengan Google Earth
Gambar IV.70 Hasil mosaik foto
Proses Mozaicing adalah proses menyatukan foto dalam satu bidang gambar. Mozaicing terbentuk karena proses dari triangluasi udara dan pengikatan titik-titik kontrol berupa tie point. Tie point yang digunakan fungsinya sebagai “jahitan” yang menghubungkan setiap foto. Untuk koordinat foto digunakan GCP yang telah dipasang sebelum pemotretan udara.
Foto mosaik ini merupakan hasil penggabungan 11 foto udara (14003, 14004, 14005, 14006, 14007, 14008, 15003, 15004, 15005, 15006, 15007) yang telah mengalami proses rektifikasi, sehingga hasilnya sama dengan foto udara yang telah dikoreksi geometrisnya. Contohnya apabila itu terjadi adalah jalan yang putus. Baik tidaknya hasil mozaicing tergantung pada hasil RMS baik pada tie point, GCP maupun fiducial mark yang telah dilakukan. Semakin besar RMS nya maka akan semakin jelek hasil mosaiknya. Sedangkan semakin kecil RMS nya maka akan semakin bagus hasil mosaiknya (mendekati kenyataan). Selain itu jumlah dari tie point dan GCP pada foto juga berpengaruh dalam hasil mosaik. Semakin banyak tie point dan GCP pada foto maka akan semakin akurat hasil mosaiknya. Sedangkan semakin sedikit tie point dan GCP pada foto maka akan semakin jauh dari akurat hasil mosaiknya.
Gambar IV.71 Mosaik dimasukkan ke Google earth
Hasil mosaic yang kita olah ini sudah sesuai dengan lokasi yang sebenarnya dengan menggunakan bantuan Google Earth. Hal ini dapat dilihat pada gambar diatas bahwa infrastruktur jalan yang ditampilkan di Google Earth sudah sesuai dengan mosaic kita , begitu pula dengan infrastruktur lain seperti permukiman dan sawah sudah ter overlay dengan cukup baik dengan mosaic kita dan sudah terlihat sama dengan mosaic kita. Namun walau sudah terlihat sama masih ada beberapa bagian di mosaic yang tidak bertampalan dengan sempurna. Hal ini bisa terjadi
karena koreksi dari pemilihan GCP dan tie point yang kurang maksimal sehingga menghasilkan RMS yang kurang maksimal dan itu mengakibatkan kualitas mosaicnya kurang bagus sehingga berpengaruh pada hasil mosaic ini jika dimasukkan di Google Earth.
IV.4 Hasil dan Analisa DEM Hasil Ektrasi Foto Udara
Hasil dari ekstraksi DEM yang sudah lakukan di software PCI Geomatica masih berupa file text (.txt) dan file tersebut masih berupa koordinat x , y dan tinggi. Untuk memvisualisasikan file text tersebut agar menjadi DEM maka kita menggunakan software Global Mapper sehingga DEM yang diolah dapat dilihat hasilnya dengan baik.
Gambar IV.72 Hasil DEM
Warna merah berarti ketinggian tinggi, warna biru berarti ketinggian rendah, dan warna hijau merah (yang terdapat pada sekeliling foto) menunjukkan bahwa hasil ekstraksi DEM gagal atau tidak muncul.. Hal ini disebabkan oleh letak antar foto udara yang kita olah tidak segaris horizontal disebabkan oleh pemilihan letak tie point yang kurang tepat dan kurang merata pada sekeliling foto serta Ground Control Point yang kurang akurat sehingga data ketinggian tidak diperoleh secara maksimal dan menyebabkan gagalnya ekstraksi DEM pada sekeliling foto.
DAFTAR PUSTAKA
1. Wicaksono, Felix Yanuar Endro. 2009. APA ITU FOTO UDARA ?. Yogyakarta : Badan Perpustakaan dan Arsip Daerah Provinsi DIY
2. Arifin, Zainal. 2009. Modul Kuliah Ilmu Ukur Tanah “ Definisi Trigonometri. Yogyakarta : Universitas Mercu Buana Yogyakarta
3. Wolf, Paul.R. 1983. ELEMNTS OF PHOTOGRAMETRY with air photo interpretation and remote sensing, second edition.Madison:The University of Wisconsin
4. Hadi, Bambang Syaeful. 2007. DASAR-DASAR FOTOGRAMETRI. Yogyakarta: Fakultas Ilmu Sosial dan Ekonomi UNY
5. Noor, Djauhari. 2012. Geologi Foto.
6. Sudarsono, Bambang. 2008. PEMETAAN FOTOGRAMETRI. Buku Ajar. Semarang: Teknik Geodesi Universitas Diponegoro
7. Harintaka, Subaryono, dan maria Tanjung. 2008. EVALUASI PENERAPAN MINI BUNDLE BLOCK ADJUSTMENT PADA FOTO UDARA FORMAT KECIL. Jurnal. Yogyakarta: Teknik Geodesi dan Geomatika FT-UGM
8. Prasetyo, Y. 2007. Diktat Kuliah : Triangulasi Udara. Semarang : Teknik Geodesi Universitas Diponegoro
9. Prahasta, E. 2008. MODEL PERMUKAAN DIJITAL. PENGOLAHAN DATA DTM (DIGITAL TERRAIN MODEL) & DEM (DIGITAL ELEVATION MODEL) DENGAN PERANGKAT LUNAK : SURFER, GLOBAL MAPPER DAN QUICKGRID. Bandung: Penerbit Informatika Bandung 10. Kusumadarma, A. 2008. Aplikasi Close Range Photogrametry dalam
Pemetaaan Bangun Rekayasa dengan Kamera Dijital Non Metrik Terkalibrasi. Tugas Akhir. Bandung: Program Studi Teknik Geodesi dan Geomatika. Institut Teknologi
11. Ardianto, Dani Fajar. 2014. PEMANFAATAN SOFTWARE KOREKSI_ORTHO.EXE DARI LAPAN UNTUK KOREKSI GEOMETRIK CITRA DI DAERAH ISTIMEWA YOGYAKARTA. Naskah Publikasi. Yogyakarta: Teknik Informatika STMIK AMIKOM Yogyakarta
12. Prasetyo, Debby Rio.2014. PEMBUATAN DIGITAL ELEVATION MODEL RESOLUSI 10M DARI PETA RBI DAN SURVEI GPS DENGAN ALGORITMA ANUDEM.Jember:FTP-UNEJ