1. Pendahuluan
Hewan peliharaan adalah hewan yang dipelihara sebagai teman sehari- hari oleh manusia, salah satu hewan yang sering dipelihara oleh kebanyakan orang adalah kucing. Sama seperti hewan peliharaan lainnya, kucingpun membutuhkan makanan yang harus diberikan oleh pemiliknya sesuai dengan porsi makan kucing tersebut. Kucing seharusnya dapat mengatur asupan makanan sesuai dengan kebutuhannya, namun 25% sampai 40% dari kucing yang telah diamati oleh dokter hewan menunjukan tanda kelebihan berat badan. Oleh karena itu, pemelihara harus waspada dalam melakukan pemberian asupan makanan pada kucing tersebut. Pada kucing domestik, kelebihan berat badan adalah masalah yang mulai berkembang dimana-mana. Diluar rumah, kucing dengan berat badan 4 kilogram membutuhkan sekitar 300 kkal/hari, sementara untuk kucing di dalam ruangan hanya membutuhkan sebanyak 200 kkal/ hari atau 30% lebih sedikit dari porsi kucing yang berada diluar rumah[1].
Kebanyakan pemelihara akan memberi makan kucing dengan porsi yang tidak diukur dan dengan jeda waktu yang tidak menentu. Hal itu dapat mengakibatkan tidak terkontrolnya porsi makan dalam siklus satu hari. Jika porsi yang diberikan kurang maka kucing akan merasa lapar dan kekurangan gizi, tetapi sebaliknya jika diberikan melebihi porsi maka kucing akan kelibihan berat badan. Pemberian makan kucing sebaiknya dilakukan sebanyak 2 kali sehari. Karena untuk mengurangi rasa lapar diantara waktu makan dan meminimalisasi masalah perilaku terkait makanan[2].
Maka dari itu, diperlukan alat yang dapat memberikan makanan untuk hewan peliharaan secara otomatis agar hewan peliharaan tersebut mendapatkan makanan yang sesuai dengan porsi yang sesuai[3].
2. Perancangan
Berikut ini adalah gambaran perancangan skripsi, yang terdiri dari rancangan perangkat keras dan rancangan perangkat lunak.
2.1. Perancangan PerangkatKeras
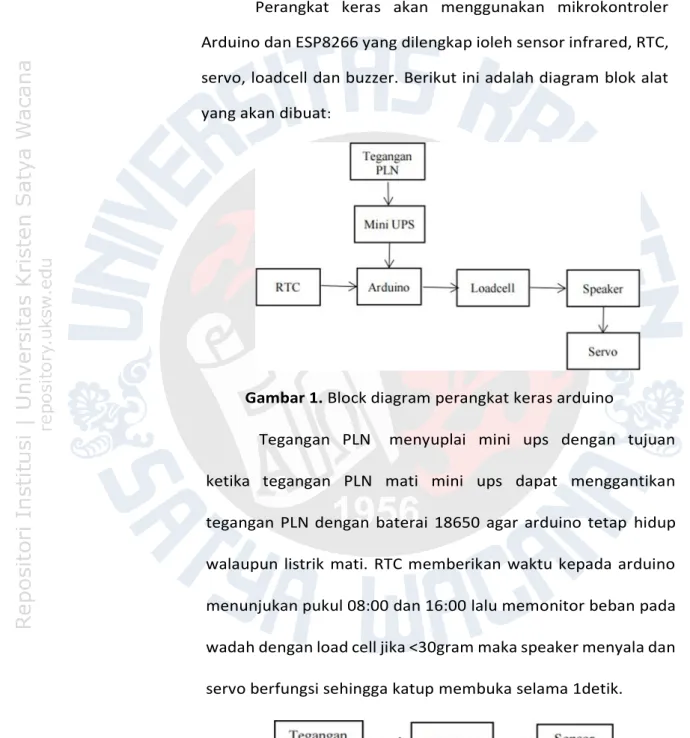
Perangkat keras akan menggunakan mikrokontroler Arduino dan ESP8266 yang dilengkap ioleh sensor infrared, RTC, servo, loadcell dan buzzer. Berikut ini adalah diagram blok alat yang akan dibuat:
Gambar 1. Block diagram perangkat keras arduino
Tegangan PLN menyuplai mini ups dengan tujuan ketika tegangan PLN mati mini ups dapat menggantikan tegangan PLN dengan baterai 18650 agar arduino tetap hidup walaupun listrik mati. RTC memberikan waktu kepada arduino menunjukan pukul 08:00 dan 16:00 lalu memonitor beban pada wadah dengan load cell jika <30gram maka speaker menyala dan servo berfungsi sehingga katup membuka selama 1detik.
Gambar 2. Block diagram perangkat keras Esp8266
Tegangan PLN menyuplai ESP8266 lalu sensor infrared terpasang pada penampung pakan dengan perhitungan pakan 0.5 g maka jika sensor infrared tidak mendeteksi adanya pakan lalu mengirim pesan pada telegram “pakan pada penampung akan habis”.Ketika servo berfungsi, katup membuka dan makanan bergerak menuju wadah pakan. Sensor pir mendeteksi adanya gerakan oleh pakan yang menuju wadah pakan, kemudian mengirim pesan pada telegram “Alat memberimakan”.
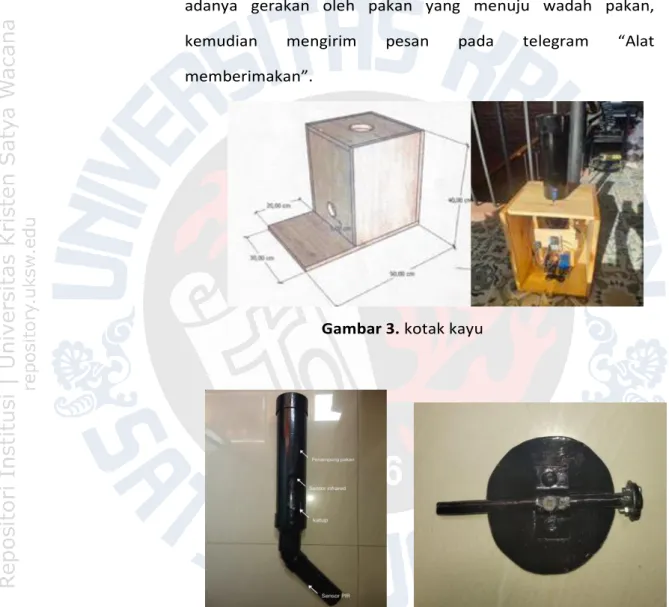
Gambar 3. kotak kayu
Gambar 4. penampung pakan Gambar 5. katup penyimpanan pakan
2.2. Rancangan Perangkat LunakAlat
2.2.1. Rancang Modul & Sensor
Perancangan perangkat lunak berfokus pada pengambilan data dari sensor yang dikirimkan ke
Arduino dan esp8266.
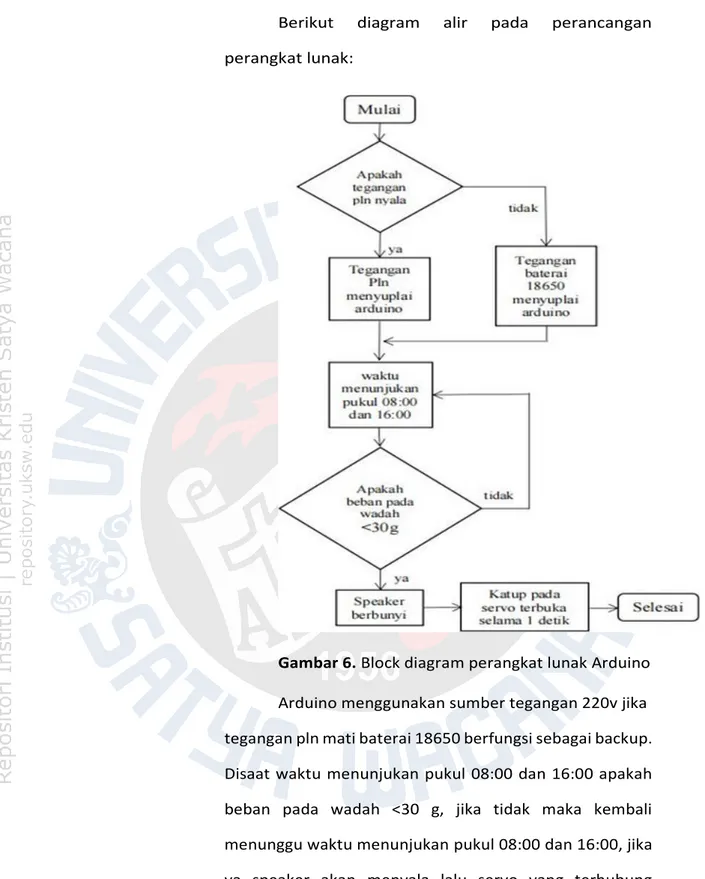
Berikut diagram alir pada perancangan perangkat lunak:
Gambar 6. Block diagram perangkat lunak Arduino
Arduino menggunakan sumber tegangan 220v jika tegangan pln mati baterai 18650 berfungsi sebagai backup.
Disaat waktu menunjukan pukul 08:00 dan 16:00 apakah beban pada wadah <30 g, jika tidak maka kembali menunggu waktu menunjukan pukul 08:00 dan 16:00, jika ya speaker akan menyala lalu servo yang terhubung dengan katup akan membuka selama 1 detik dengan tujuan dapat memberikan pakan sebanyak 30g.
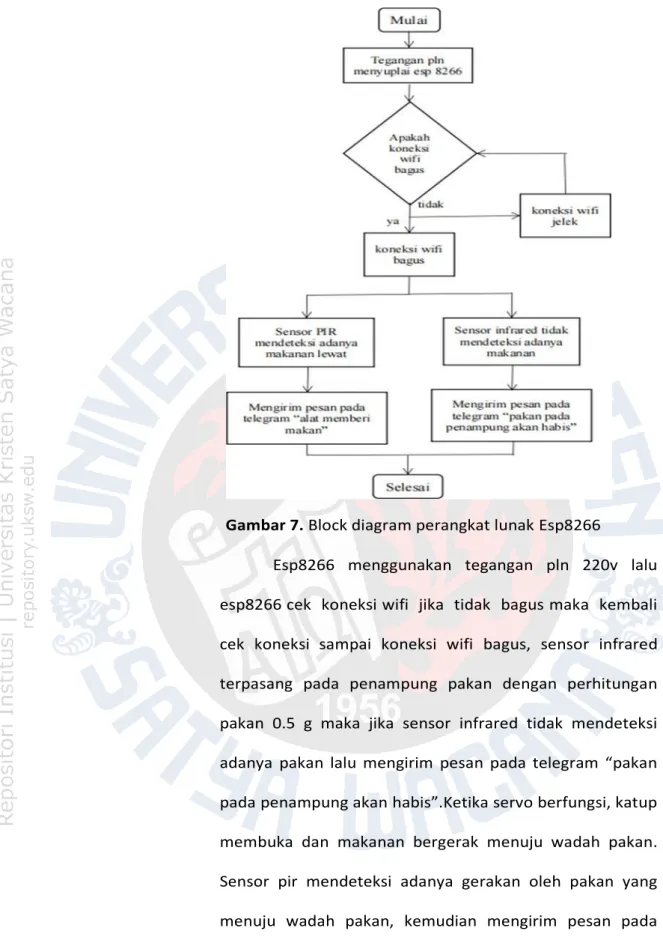
Gambar 7. Block diagram perangkat lunak Esp8266
Esp8266 menggunakan tegangan pln 220v lalu esp8266 cek koneksi wifi jika tidak bagus maka kembali cek koneksi sampai koneksi wifi bagus, sensor infrared terpasang pada penampung pakan dengan perhitungan pakan 0.5 g maka jika sensor infrared tidak mendeteksi adanya pakan lalu mengirim pesan pada telegram “pakan pada penampung akan habis”.Ketika servo berfungsi, katup membuka dan makanan bergerak menuju wadah pakan.
Sensor pir mendeteksi adanya gerakan oleh pakan yang menuju wadah pakan, kemudian mengirim pesan pada telegram “Alat memberi makan”.
2.2.2.
Coding PadaArduinoCoding diatas memasukan library & menginisialisasi rtc, servo, load cell & menginisialisasi
Gambar 8. Potongan coding library & inisialisasi
Gambar 9. Potongan coding void setup
Coding pada void setup ketika ingin mengkalibrasi waktu
Gambar 10. Potongan coding void loop
Coding void loop pada serial print menampilkan waktu sekarang lalu ketika waktu menunjukan pukul 8:00 serial print menampilkan cek berat jika berat <300g maka speaker aktif selama 2 detik lalu servo aktif sama begitu pula jika waktu menunjukan pukul 16:00.
2.2.3. Coding Pada ESP8266
Gambar 11. Coding memasukan library dan inisialisasi
Coding diatas memasukan user name wifi dan password wifi agar esp8266 dapat terhubung pada wifi dirumah dan juga memasukan token dan id untuk dapat terhubung pada bot telegram.
Gambar 12. Coding void setup
Coding pada void setup menampilkan pada serial monitor koneksi wifi apa bagus atau jelek lalu bot telegram mengirim pesan bahwa alat sudah aktif.
Gambar 13. Coding void loop
Coding pada void loop jika pada sensor gerak/ pir mendeteksi gerakan maka bot telegram mengirim pesan bahwa alat telah memberi pakan dan jika sensor infrared menunjukan angka 1 maka bot telegram mengirim pesan penampung pakan akan habis.
3. Pengujian danAnalisis
3.1.
Pengujian sensor berat sebagai proteksi
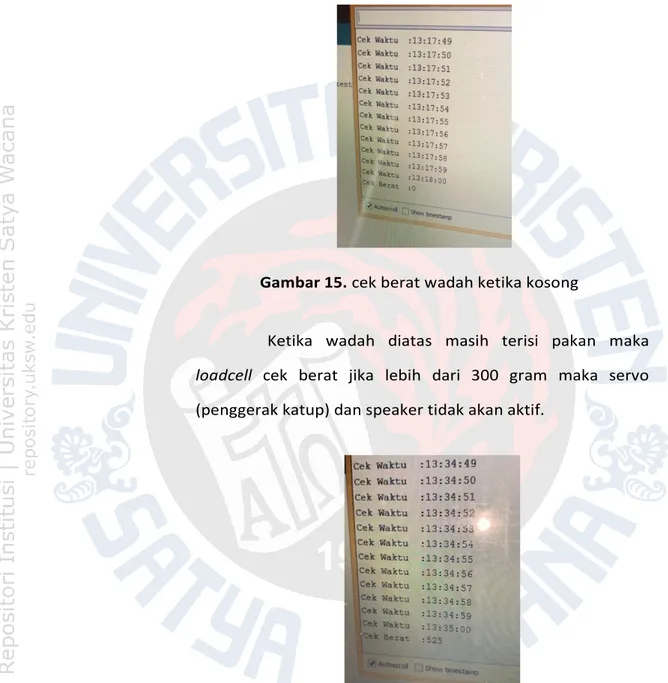
Gambar 14. wadah pakan & sensor berat
Pada wadah kosong maka loadcell cek berat tidak mendeteksi adanya beban maka servo (penggerak katup) dapat aktif wada terisi pakan.
Gambar 15. cek berat wadah ketika kosong
Ketika wadah diatas masih terisi pakan maka loadcell cek berat jika lebih dari 300 gram maka servo (penggerak katup) dan speaker tidak akan aktif.
Gambar 16. cek berat wadah ketika terisi makanan
3.2. Pengujian notifikasi melalui aplikasi telegram
3.2.1. uji coba notifikasi Ketika penampung pakan akan habis
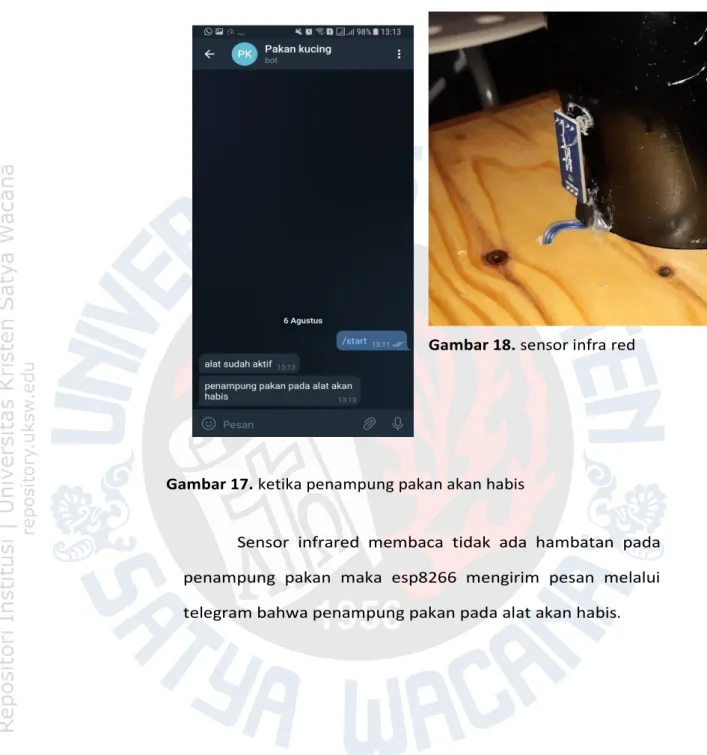
Gambar 18. sensor infra red
Gambar 17. ketika penampung pakan akan habis
Sensor infrared membaca tidak ada hambatan pada penampung pakan maka esp8266 mengirim pesan melalui telegram bahwa penampung pakan pada alat akan habis.
3.2.2. uji coba notifikasi ketika alat berhasil memberipakan
Gambar 20. sensor pir
Gambar 19. ketika alat berhasil memberi pakan
Sensor pir akan mendeteksi gerakan pakan ketika katup terbuka maka esp8266 akan mengirimkan pesan melalui telegram alat berhasil memberi makan.
3.3. Analisis perhitungan MiniUPS
Perhitungan mini UPS dilakukan untuk mengetahui dapat berapa lama mini UPS bertahan tanpa tegangan PLN. Mini UPS menggunakan 4 baterai 18650 rangkaianseri
Gambar 21. baterai rangkaian seri
Energi listrik adalah perpindahan energi dalam bentuk tegangan dan arus dalam waktu tertentu. Jika menggunakan catu daya USB, daya masuk arduinouno adalah 2,4watt.
P = E / t
E = P x t 22,2 wh = 2,4 W x t t = 22,2 / 2,4
t = 9,25 jam
Keterangan:
P = Daya Listrik dengan satuan Watt E E = Energi dengan satuanJoule
t = waktu dengan satuanDetik
Mini UPS dapat bertahan ketika listrik mati selama 9,25 jam
Gambar 22. modul mini ups
Mini ups menjadi sumber tegangan arduino dengan tujuan ketika mati lampu alat masih dapat bekerja 9,25 jam.
4 . Kesimpulan
Dari pengujian alat yang dilakukan didapatkan beberapa kesimpulan dari pengujian sensor berat sebagai proteksi, notifikasi melalui aplikasi telegram dan perhitungan mini ups. Proteksi pada sensor berat berfungsi ketika pukul 08.00 dan 16.00, ketikap ada wadah pakan masih terdapat pakan kucing >300g maka alat tidak aktif untuk menghindari pakan berlebih. Esp8266 akan otomatis mengirim pesan melalui telegram sebagai notifikasi ketika esp8266 diberikan tegangan 220v, disaat alat memberi makan dan disaat alat tidak mendeteksi adanya pakan pada penampung pakan. Analisis pada perhitungan mini ups disaat listrik padam dapat menghidupkan arduino selama 9,5jam.