i
TUGAS AKHIR
LENGAN ROBOT DENGAN PENGGERAK MOTOR
STEPPER
DAN MOTOR
SERVO
Diajukan untuk memenuhi salah satu syarat Memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh :
KHRISWARA DWITANTYA NIM : 145114053
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
▸ Baca selengkapnya: tuliskan cara melakukan gerakan lengan dengan bantuan pelampung
(2)ii
FINAL PROJECT
ROBOT ARM WITH ACTIVATOR STEPPER MOTOR
AND SERVO MOTOR
In a partial fulfilment of the requirements For the degree of Sarjana Teknik Department of Electrical Engineering
Faculty of Science and Technology, Sanata Dharma University
KHRISWARA DWITANTYA NIM :145114053
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO :
JALANILAH HIDUPMU DENGAN SEGALA USAHA MAKSIMAL
DENGAN DEMIKIAN HASIL TIDAK AKAN PERNAH
MENGECEWAKAN
viii
INTISARI
Robot menjadi pilihan untuk membantu pekerjaan manusia mengatasi masalah kepresisian, keamanan, fleksibilitas dan pekerjaan yang berulang. Lengan robot menjadi salah satu jenis robot yang dapat membantu pekerjaan manusia. Penelitian lengan robot ini dibuat untuk memperagakan gerakan robot yang dikendalikan dari jarak jauh. Lengan robot ini menggunakan basis mikrokontroler arduino uno R3 sehingga menarik untuk dipelajari
Lengan robot dalam penelitian ini terdiri dari joint dan link dengan 4 degree of freedom (4DOF). Actuator lengan robot adalah dengan motor stepper. Lengan robot mendapat input dari PC dengan software arduino IDE, untuk menggerakan lengan robot. Data yang dikirimkan dari PC ke arduino uno R# berupa program pulsa pulsa digital dengan komunikasi serial. Mikrokontroler mendapatkan data masukan dari kontroler joystick yang telah dipasangkan pada arduino uno R3 dan akan mengeluarkan pulsa pulsa digital untuk menggerakan motor stepper
Hasil Penelitian yang telah dilakukan menggunakan lengan robot dengan uji coba untuk menggerakan menggunakan masukanjoystick dan menggunakan program sederhana yang sudah ditentukan sebelumnya menghasilkan data keberhasilan percobaan. Tingkat keberhasilan lengan robot dengan penggerak motorsteppersudah sesuai dari perancangan
maka dapat dikatakan percobaan ini berhasil. Yaitu dengan menggerakan lengan robot menggunakan modul joystick untuk menggambar bidang 2D
ix
ABSTRACT
Robot become choice for helping people work to overcome the problem of accuracy, security, flexibility and repetitive job. A robot arm is one of type robot that can assist the job. Robot arm is study designed to demonstrate the robot's movements are controlled remotely. This robot arm using a microcontroller arduino uno R3 so interesting learn
A robot arm in this RESEARCH consists of joint and link with 4 degree of freedom (4DOF). The actuator arm robot with a stepper motor. Robot arm gets input from a PC with software arduino IDE, to move the robot arm. The data transmitted from the PC to arduino uno R3 in the digital pulses pulse program with serial communication. Microcontroller obtain input data from joystick controller that has been attached to the arduino uno R3 and will send a digital pulses to drive the stepper motor
The result of research thats has been done, using robot arm to move use joystick and use simple program, the success rate from robot arm with motor stepper is same with the design. It can said the experiment is successful by moving the robot arm using a joystick to draw 2D shape
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus atas segala rahmat-Nya. Berkat Kasih dan KaruniaNya selama menjalani proses pembuatan tugas akhir ini, penulis dapat menyelesaikan tugas akhir dengan judul “Lengan Robot Dengan Penggerak MotorStepperdan MotorServo”.
Tugas akhir ini disusun untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik (S.T) bagi mahasiswa program S-1 Jurusan Teknik Elektro Universitas Sanata Dharma Yogyakarta. Selama proses penyusunan proposal ini, penulis banyak mendapat bantuan dan dukungan dari berbagai pihak, untuk itu penulis mengucapkan terimakasih kepada:
1. Bapak Petrus Setyo Prabowo, S.T., M.T., selaku Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
2. Bapak Djoko Untoro, S.Si., M.T., selaku Dosen Pembimbing tugas akhir yang telah banyak meluangkan waktu untuk memberikan bimbingan.
3. Bapak Martanto, M.T., dan Bapak Djoko Untoro, S.Si., M.T., yang telah memberikan saran dan kritik dalam menyelesaikan penulisan tugas akhir.
4. Seluruh dosen Teknik Elektro yang telah memberikan ilmu yang bermanfaat kepada penulis selama kuliah.
5. Keluarga besar tercinta yang ada di rumah yang selalu mendoakan dan terus memberikan semangat dalam mengerjakan.
6. Seluruh teman-teman prodi Teknik Elektro angkatan 2014 hingga 2012 atas kerjasama dan kebersamaannya selama menjalani studi.
7. Kawan-kawan penggembira dan penyemangat yang memberikan dukungan.
xii
DAFTAR ISI
Halaman Sampul(Bahasa Indonesia)... i
Halaman Sampul(Bahasa Inggris)... ii
Lembar Persetujuan... iii
Lembar Pengesahan... iv
Halaman Persembahan... v
Lembar Pernyataan Keaslian Karya... vi
Lembar Pernyataan Persetujuan Publikasi Karya Ilmiah... vii
Intisari... viii
Abstract... ix
Kata Pengantar... x
Daftar Isi... xii
Daftar Gambar... xiv
Daftar Tabel... xvi
Daftar Persamaan... xvii
BAB I PENDAHULUAN 1.1 Latar Belakang... 1
1.2 Tujuan dan Manfaat ... 3
1.3 Batasan Masalah ... 3
1.4 Metodologi Penelitian ... 4
BAB II DASAR TEORI 2.1 Mikrokontorler... 6
2.1.1 Arduino Uno R3... 6
2.2 Software Arduino... 7
2.3 Motor Servo... 8
2.4 Motor stepper... 11
2.5 Torsi... 16
2.6 Driver Motor Stepper... 16
2.7 Kinematika... 17
BAB III RANCANGAN PENELITIAN 3.1 Perancangan Perangkat Keras... 23
xiii
3.1.1.1 permodelan mekanik... 26
3.1.1.2 Permodelan inverse Kinematik... 34
3.1.2 Perancangan elektrik sistem pengendali... 43
3.1.3 Perancangan homing sensor... 44
3.2 Perancangan perangkat lunak sederhana... 45
3.2.1 Perancangan pengendali motor servo dan stepper dengan arduino 46 BAB IV HASIL DAN PEMBAHASAN 4.1 hasil pengujian penggerak... 48
4.1.1 pembahasan pada program arduino... 49
4.2 hasil perancangan... 55
4.2.1 Bentuk mekanik sistem lengan robot... 60
4.2.2 Komponen elektrik sistem lengan robot... 60
4.2.3 Pengujian Gerak mekanik lengan robot... 61
4.2.3 PengujianRepeatability... 63
4.3 hasil pengujian gambar bidang dua dimensi... 64
4.3.1 Analisa Hasil Gambar Kotak... 64
4.3.2 Analisa Hasil Gambar Segitiga... 65
4.3.3 Analisa Hasil Gambar Lingkaran... 67
4.3.4 Analisa Hasil Gambar Tanda Tambah... 68
4.4 hasil pengujian nilai step pada motorstepper... 69
4.5 hasil pengujian area kerja ... 70
4.6 pengujian menggunakan program tanpajoystick... 71
BAB V KESIMPULAN 5.1 Kesimpulan... 73
5.2 Saran... 73
xiv
DAFTAR GAMBAR
Gambar 1.1 Blok Diagram Lengan Robot... 4
Gambar 2.1 TampilanSoftware ArduinoPada Komputer... 8
Gambar 2.2 GambarMotor Servo... 9
Gambar 2.3 KonstruksiMotor Servo... 9
Gambar 2.4 Pulsa KendaliMotor Servo... 10
Gambar 2.5 Penampang Melintang dariMotor Stepper Variable Reluctance... 12
Gambar 2.6 Motor steppertipe permanent magnet... 12
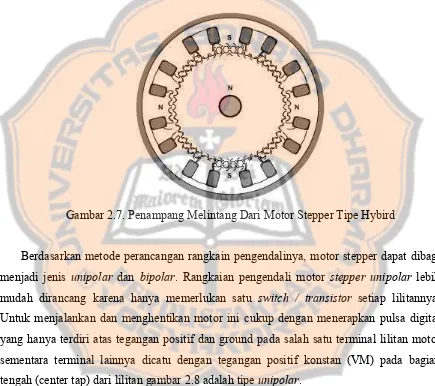
Gambar 2.7 Penampang Melintang DariMotor StepperTipeHybrid... 13
Gambar 2.8 Motor StepperDengan Lilitan Unipolar... 14
Gambar 2.9 Motor StepperDengan Lilitan Bipolar... 14
Gambar 2.10 GambarMotor Stepper Nema 17... 15
Gambar 2.11 Modul Driver Motor Stepper... 16
Gambar 2.12 Gambar SudutJoint... 18
Gambar 2.13 Konfigurasi Lengan Robot Satu Sendi... 19
Gambar 2.14 Konfigurasi Lengan Robot Dua Sendi... 20
Gambar 3.1 Gambar Diagram Blok Perancangan Perangkat Keras... 24
Gambar 3.2 Blok Diagram Perangkat Keras ... 25
Gambar 3.3 Tampilan Desain 3D Lengan Robot... 27
Gambar 3.4 Tampilan PosisiMotor StepperPada Lengan Robot... 28
Gambar 3.5 Tampilan PosisiMotor ServoPada Desain Lengan Robot... 29
Gambar 3.6 Tampilan PosisiEnd EffectorBerupaPointerDengan Spidol... 30
Gambar 3.7 Tampilan SumbuAxisX,Y,Z... 33
Gambar 3.8 Panjang Dan Lebar Meja Kerja... 33
Gambar 3.9 Ilustrasi Jangkauan GerakLinkDan Batasan Maksimum... 34
Gambar 3.10 Rencana Yang DIgunakan Sebagai Test Dari Lengan Robot... 35
Gambar 3.11 Lengan Robot Tampak Atas... 36
Gambar 3.12 Penyederhanaan Gambar Lengan Robot Dengan Analisa Geometri Untuk Mencari1 ... 36
Gambar 3.13 Lengan Robot Tampak Samping... 38
xv
Gambar 3.15 Analisa Geometri Lengan Robot Untuk Mencari2 dan3... 39
Gambar 3.16 Analisa Geometri Lengan Robot untuk mencari4... 41
Gambar 3.17 Titik Referensi Yang Digunakan Untuk Menguji Lengan Robot... 42
Gambar 3.18 Gambar Rangkaian Elektrik Sistem Pengendali ... 43
Gambar 3.19 Gambar sensor homing pada shoulder... 44
Gambar 3.20 Gambar Sensor Homing Pada Elbow... 45
Gambar 3.21 Diagram alir Sistem Perangkat Lunak Sederhana... 46
Gambar 3.22 Diagram Alir Sistem Pada Arduino IDE... 46
Gambar 3.23 Gambar Konfigurasi Kontroler... 47
Gambar 4.1 Gambar Tampilan Perangkat Lunak ArduinoIDE... 50
Gambar 4.2 Contoh Program Full Step... 51
Gambar 4.3 Konfigurasi Untuk 1/32 step... 52
Gambar 4.4 konfigurasi kontroler pada arduino... 53
Gambar 4.5 konfigurasi dari MS1 MS2 dan MS3 pada pin arduino... 54
Gambar 4.6 konfigurasi pin direction, step dan sleep ketigadriver... 54
Gambar 4.7 program utama penggerak motorstepper... 55
Gambar 4.8 Bentuk Mekanik Lengan Robot... 56
Gambar 4.9 Bentuk Mekanik Lengan (link)... 57
Gambar 4.10 Posisi motorsteppersebagai penggerak lengan robot... 58
Gambar 4.11 posisi motorstepperpenggerakBase... 59
Gambar 4.12 Gambar rangkaian elektrik... 60
Gambar 4.13 Cara Pengukuran SudutjointMenggunakan Busur Derajat... 61
Gambar 4.14 Hasil PengujianRepeatability... 63
Gambar 4.15 Gambar Kotak dari Gerakan Lengan Robot... 65
Gambar 4.16 Hasil Gambar Segitiga ... 66
Gambar 4.17 Hasil Gambar Lingkaran... 67
Gambar 4.18 Hasil Gambar Tanda Tambah... 69
Gambar 4.19 Gambar Area Kerja Pada Kertas A4... 70
Gambar 4.20 Hasil Pengujian Menggunakan Program Pada Sumbu Y... 71
xvi
DAFTAR TABEL
Tabel 3.1 Keterangan Lengan Penghubung (link)... 29
Tabel 3.2 Tabel Batasan Gerakan Lengan Robot Berdasarkan Putaran MotorStepperDan Desain Lengan... 35
Tabel 4.1 Konfigurasi Masukan sinyal MS1 MS2 dan MS3... 53
Tabel 4.2 SpesifikasilinkLengan Robot... 58
Tabel 4.3 HasilPengujianArea Kerja Dari Setiap Lengan... 62
Tabel 4.4 Hasil Pada Pengujian Repeatabilitas... 63
Tabel 4.5 Hasil Pengujian Nilai Step Sudut X... 69
Tabel 4.6 Hasil Pengujian Nilai Step Sudut X... 69
xvii
DAFTAR PERSAMAAN
Persamaan 2.1 ... 16
Persamaan 2.2 ... 16
Persamaan 2.3 ... 16
Persamaan 2.4 ... 16
Persamaan 2.5 ... 18
Persamaan 2.6 ... 18
Persamaan 2.7 ... 18
Persamaan 2.8 ... 19
Persamaan 2.9 ... 20
Persamaan 2.10 ... 20
Persamaan 2.11 ... 20
Persamaan 2.12 ... 20
Persamaan 2.13 ... 20
Persamaan 2.14 ... 20
Persamaan 2.15 ... 21
Persamaan 2.16 ... 21
Persamaan 2.17 ... 21
Persamaan 2.18 ... 21
Persamaan 2.19 ... 21
Persamaan 2.20 ... 21
Persamaan 2.21 ... 22
Persamaan 2.22 ... 22
1
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Bersamaan dengan kemajuan jaman yang semakin pesat, maka teknologi yang ada saat ini juga ikut berkembang semakin pesat, tidak terkecuali didalam dunia robotika, baik itu didalam bidang industri, medis, militer dan lain sebagainya. Berbagai macam penelitian tengah dilakukan, beberapa robot yang sudah adapun sekarang sudah semakin dikembangkan dan disempurnakan, sehingga pekerjaan manusia semakin diringankan oleh robot. Robot sendiri adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia ataupun menggunakan program yang sudah dibuat sebelumnya, maka dari definisi robot tersebut maka robot adalah hasil perpaduan antara mesin ( mechanic ), elektronika ( electric ) dan pemrograman (informatic)
Salah satu robot yang kini banyak digunakan dalam industri ataupun dalam bidang umum adalah robot manipulator, manipulator merupakan bagian mekanik yang dapat difungsikan untuk memindah, menulis, mengangkat dan memanipulasi benda kerja. Secara umum robot manipulator dibedakan menjadi beberapa jenis menurut sumbu koordinat yang digunakan yaitu SCARA, cylindrical, articulated, spherical [1]. Robot manipulator dibuat menyerupai lengan manusia, sehingga nantinya dapat membantu pekerjaan yang berat.
Pada kemajuan teknologi ini, banyak industri yang telah menggunakan teknilogi lengan robot, sehubungan dengan keamanan, kecepatan, presisi dan konsistensi maka dipilihlah lengan robot untuk menggantikan ataupun meringankan pekerjaan manusia. Karena lengan robot bisa diprogram dari tempat yang berbeda atau dari jauh, menempatkan lengan robot sebagai pengganti yang cocok, kini banyak yang telah mengembangkan lengan robot yang bertujuan untuk industri maupun edukasi.
sebagai bahan edukasi mengenai lengan robot, yaitu lengan robot untuk menggambar bidang 2 dimensi yang sudah ditentukan sebelumnya. Lengan robot ini memiliki 4 DOF ( degree of freedom ) pada sumbu X,Y dan Z.
Pada sebuah jurnal yang berjudul “Robot Arm Controller Using FPGA” [2] controller lengan robot yang dibuat adalah menggunakan Field Programmable Gate Array (FPGA)
yaitu sirkuit terpadu (IC) dalam teknologi digital. Dimana didalamnya terdapat rangkaian logika yang dapat diprogram. Konfigurasi FPGA umumnya ditentukan dengan menggunakan bahasa perangkat keras atau HDL. Kekurangan dari sistem ini adalah FPGA menggunakan bahasa hardware. Sehingga jika kita ingin membuat sebuah program maka kita harus menentukan setiap gerbang yang harus digunakan. Berbeda dengan jika menggunakan mikrokontroler, karena mikrokontroler menggunakan bahasa pemrograman C maka sangat mudah untuk membuat sebuah program pada mikrokontroler.
Peneliti yang sudah pernah membuat prototype dari lengan robot ini adalah Antonius Welly Adi Nugroho dengan judul “Lengan Robot Penggambar Bidang Dua Dimensi Berbasis Mikrokontroler Dengan PC” [3] pada penelitian sebelumnya lengan robot yang digunakan digerakan dengan motor servo. Kelemahan motor servo adalah kurang akuratnya sudut yang diciptakan oleh motor servo, saat diinginkan sudut dibawah 1° maka motor servo akan kesusahan dalam menjangkaunya.
Kemudian keterbatasan sudut yang dimiliki pada motor servo juga menjadi sebuah kelemahan. Sudut motor servo yang digunakan pada penelitian sebelumnya memiliki sudut maksimum 180°. Lalu penempatan dari penggerak lengan robot pada penelitian sebelumnya juga memiliki kelemahan yaitu penempatan yang langsung menempel pada setiap joint pada lengan robot membuat beban yang akan diangkat oleh servo menjadi meningkat, sehingga kinerja dari motor servo menjadi lebih berat dan tidak terlalu akurat disamping itu jenis servo yang digunakan adalah jenis servo giant yang memiliki ukuran yang besar dan pastinya dengan harga yang mahal.
1.2. Tujuan dan Manfaat
Tujuan umum dari penelitian ini adalah membuat dan menguji suatuprototype berupa lengan robot, dengan penggerak motor stepper. Secara khusus penelitian ini bertujuan untuk merancang sebuah lengan robot yang digerakkan oleh motor stepper, dan dapat memperagakan gerakan lengan robot dengan lebih presisi dan Lengan robot yang dibuat diberi perintah melalui kontroler untuk melakukan kegiatan menggambar bidang dua dimensi berupa kotak, segitiga, lingkaran dan tanda tambah dengan ukuran tertentu yang nantinya akan diuji tingkat ketepatan dan kemampuan menggambar dari lengan robot.
Penelitian ini menghasilkan manfaat untuk membantu manusia pada pekerjaan produksi maupun pada pekerjaan lainya, seperti menulis, memindahkan barang, pengecatan maupun pengelasan. Penelitian ini juga bermanfaat untuk membandingkan kinerja lengan robot yang menggunakan penggerak motorservodengan lengan robot yang menggunakan penggerak motorstepperyang lebih presisi dibandingkan motor servo.
1.3. Batasan Masalah
Pembatasan masalah bertujuan untuk mempermudah dalam pelaksanaan penelitian maupun penulisan skripsi, sehingga tidak terjadi kesalahan dalam penelitian yang dimaksud. Batasan untuk penelitian ini adalah:
A. Gambar yang dibuat adalah gambar bidang 2 dimensi yang sudah ditentukan sebelumnya, yaitu gambar kotak, lingkaran, segitiga dan tanda tambah yang sudah diprogram melalui PC.
B. Menggunakan sebuah mikrokontroler arduino UNO R3 sebagai kontroler lengan robot yang sudah diprogram melalui PC.
C. Menggunakan 3 buah motor stepper dan 1 buah motor servo sebagai penggerak pada setiapjointdari lengan robot.
D. Lengan robot memiliki pergerakan pada sumbu X, Y, dan Z.
E. Lengan robot memiliki 4 derajat kebebasan ataudegree of freedom(DOF). F. Menguji tingkat akurasi dari lengan robot berpenggerak motorservodan
lengan robot berpenggerak motorstepperdengan uji repeatabilitas
1.4. Metodologi Penelitian
Berdasarkan pada tujuan yang ingin dicapai metodogi yang digunakan dalam penelitian ini adalah sebagai berikut:
A. Studi literatur dan referensi, yaitu mempelajari buku-buku dan jurnal-jurnal dari pustaka yang berhubungan dengan mikrokontroler arduino UNO R3, motorstepper,
motorservo, mekanika dan lengan robot.
B. Studi kasus pada alat yang sebelumnya sudah dibuat, guna memahami prinsip kerja dari lengan robot.
C. Menguji motor stepper dan motor servo guna mengetahui dan memahami prinsip kerja motorservodan motorstepper
D. Menguji rangkaian mikrokontroler motor servo dan motor stepper, guna mengetahui bahasa pemrograman yang digunakan untuk mengendalikan motor servo dan motor stepper dan lebih memahami cara kerja pengendalian lengan robot E. Perancangan sistem hardware dan software sederhana yang bertujuan untuk
mencari komponen yang sesuai dan menyesuaikan program yang akan dipakai
Gambar 1.1 Blok diagram lengan robot.
F. Pembuatan sistem hardware dan software. Tahap ini adalah lanjutan dari tahap perancangan sebelumnya, yang meliputi pembuatan fisik ( hardware ) dari lengan robot dan pemasangan komponen komponen yang sudah ditentukan sebelumnya baik komponen mekanik maupu elektrik. Pada tahap ini pembuatan perangkat lunak ( software ) bertujuan memberikan perintah kepada lengan robot yang nantinya akan berguna untuk mengendalikan lengan robot, sehingga robot akan bergerak sesuai dengan apa yang sudah diprogramkan. Program dari visual basic Akan dikirimkan ke bagian mikrokontroler arduino UNO R3, kemudian program akan diteruskan ke motor stepper dan motor servo, sehingga lengan robot nantinya akan bergerak sesuai dengan apa yang telah diperintahkan.
pengujian dilakukan dengan menjalankan program yang selanjutnya dikomunikasikan ke motor stepper dan motor servo. Pengujian dilakukan untuk menguji kesamaan gerak lengan robot dan program yang telah diberikan sebelumnya. Teknik pengambilan data dilakukan untuk melihat bentuk bidang 2 dimensi yang digambar oleh lengan robot, perbedaan ukuran yang telah diprogram dan gambar yang sudah dibuat oleh lengan robot dan mengamati persentase kesalahannya.
6
BAB II
DASAR TEORI
2.1. Mikrokontroler
Mikrokontroler dapat disamakan dengan processor, didalam mikrokontroler program akan diolah dan nantinya akan dikirimkan ke perangkat output walaupun mikrokontroler berbentuk kecil namun mikrokontoler memiliki elemen - elemen dasar yang sama dengan komputer walaupun secara sederhana.
Mikrokontroler digunakan sebagai pengolah perintah yang berupa program dari masukan sehingga menjadi keluaran yang diinginkan. Masukan dari mikrokontroler dapat berupa tombol,sensor,kamera atau langsung dari komputer. Pada bagian keluaran mikrokontroler dapat berupa motor,lampu,selenoidmaupun alat suara, pada perkembangan jaman keluaran dari mikrokontroler semakin banyak perkembangan. Kini keluaran mikrokontroler dapat mengontrol sebuah sistem. Pada penelitian ini menggunakan
platformdengan jenis open source yaitu arduino, yang digunakan adalah arduino Uno R3 dengan bahasa pemrogramannya adalah bahasa C [4]
2.1.1. Arduino Uno R3
Komunikasi
Arduino Uno R3 dapat berkomunikasi dengan komputer menggunakan port USB. Firmware ‘16U2 menggunakan driver standar COM dan tidak memerlukan driver eksternal lagi. Tetapi pada komputer masih memerlukan program tambahan untuk membaca program pada arduino, karena program pada arduino Uno R3 memiliki file ekstension berupa ino. Program arduino pada komputer juga berfungsi sebagai pengirim dari komputer menuju Arduino Uno R3 melalui chip USBto serialdan koneksi USB
2.2.
Software
Arduino
Membuat atau menulis program pada arduino dilakukan dengan arduino IDE, yaitu
software yang beroprasi pada komputer. Arduino softwaretersedia untuk berbagai macam
platform, seperti Windows, Mac OS dan Linux. Arduino software [6] berfungsi untuk menuliskan program dan mengirimnya ke perangkat Arduino Uno R3 menurut situs http://www.arduino.cc
Arduino Uno R3 yang memiliki basis open source dan dapat diprogram pada sistem operasi pada komputer berbasis Windows,Mac OS dan Linux sehingga memudahkan berbagai kalangan untuk menggunakannya.
Gambar 2.1 Tampilansoftware arduno(ArduinoIDE) pada komputer
Tugas darisoftware arduinoadalah menghasilkan program yang dapat dijalankan pada
board arduino atau pada sistem mikrokontroler lainnya.Sketchadalah nama program yang ditulis pada software arduino. Sketch nantinya akan di compile untuk melihat apakah ada bahasa pemrograman yang error ataupun kurang, setelah selesai nantinya program akan di kirim ke sistem mikrokontroler ataupun ke arduino untuk dijalankan. [7]
2.3. Motor Servo
Gambar 2.2 Motor Servo
Motor servo terdiri dari motor DC,rangkaian gear dan potensiometer seperti pada Gambar 2.3, potensiometer berfungsi sebagai menentukan batas maksimum putaran motor servo . Sedangkan sudut dari sumbu motor servo diatur berdasar lebar pulsa pada pin kontrol motor servo [8]
Gambar 2.3 Konstruksi Motor Servo
Motor servo mampu bergerak dua arah atau CW dan CCW, dimana arah dari putaran servo dapat dikendalikan dengan memberikan variasi lebar pulsa pada sinyal PWM pada pin kontrolnya.
standart bergerak dua arah, CW dan CCW dengan tiap arahnya mencapai 90° sehingga total sudutnya adalah 180° ( CW 90° dan CCW 90° ). Sedangkan pada motor servo
continuous dapat bergerak dengan dua arah CW dan CCW namun tanpa batasan sudut, sehingga dapat berputar secaracontinuous( kontinyu )
Pulsa Kontrol Motor Servo
Gambar 2.4. Adalah bagaimana operasional motor servo berdasar lebar pulsa. Motor servo dikendalikan oleh sebuah pulsa selebar ±20 ms, pulsa antara 0,5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Jika motor servo diberi sinyal sebesar 1,5 ms maka motor servo mencapai gerakan 90°, dan bila diberi pulsa kurang dari 1,5 ms maka posisinya akan mendekati 0° dan jika diberi pulsa lebih dari 1,5 ms maka motor servo akan mendekari sudut 180° [8]
Gambar 2.4 Pulsa Kendali Motor Servo
Motor servo akan bekerja dengan baik jika diberi sinyal PWM dengan frekuensi 50 Hz pada pin kontrolnya. Bila sinyal dengan frekuensi 50 Hz dicapai pada kondisi Ton duty cycle1,5 ms, maka motor akan berhenti di tengah tengah atau pada sudut 0°. Pada saat Ton
duty cycle dari sinyal yang diberikan kurang dari 1,5 ms maka motor akan berputar berlawanan arah jarum jam atau CCW dengan membentuk sudut yang besarnya linear
Ton duty cycle dari sinyal yang diberikan lebih dari 1,5 ms maka motor akan berputar searah jarum jam atau CW dengan membentuk sudut yang besarnya linear terhadap besarnya Tonduty cycledan akan bertahan di posisi tersebut.
2.4.Motor
Stepper
Motor stepper adalah perangkatelektromekanisyang bekerja dengan mengubah pulsa
elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Penggunaan motorstepper memiliki beberapa keunggulan dari motor stepper adalah sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur. Kemudian motor dapat langsung memberikan torsi penuh pada saat mulai bergerak. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi. Kemudian sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
Motor stepper memiliki 3 jenis yaitu tipe Variable reluctance ( VR ) lalu tipe
permanent magnet ( PM ) dan tipe Hybird ( HB ). Pada tipe Variable reluctance motor
Gambar 2.5. Penampang Melintang Dari motorsteppertipevariable reluctance
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan (perhatikan gambar 2.6). Dengan adanya magnet permanen, maka intensitas fluksmagnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah setiap putarannya.
Motor stepper tipe hybird memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hybird memiliki gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secaraaxialpada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipehybird dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Pada gambar 2.7 ditunjukan gambar dari penampang motorsteppertipehybird
Gambar 2.7. Penampang Melintang Dari Motor Stepper Tipe Hybird
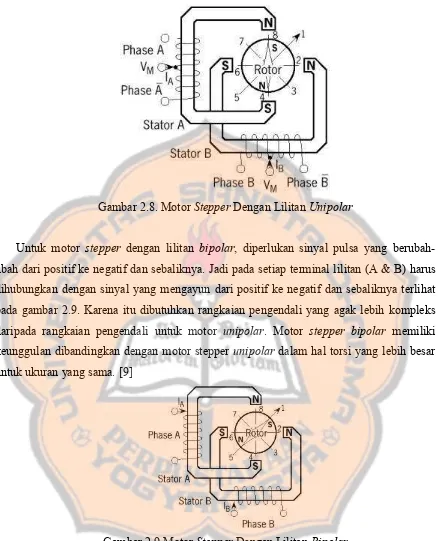
Gambar 2.8. MotorStepperDengan LilitanUnipolar
[image:31.595.90.528.80.621.2]Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya terlihat pada gambar 2.9. Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepperunipolar dalam hal torsi yang lebih besar untuk ukuran yang sama. [9]
Gambar 2.9 MotorStepperDengan LilitanBipolar
Motor stepper juga memiliki beberapa kelemahan dibanding motor servo, yaitu memiliki tingkat kebisingan yang sedikit lebih banyak daripada servo. Kemudian kecepatan motorstepperjuga lebih lambat dibandingkan motorservo, yaitu berkisar antara 1000 hingga 2000 rpm maksimal. Motor stepper juga menggunakan sistem open loop yaitu tidak adanyafeedbacksehingga harus diberi sensor tambahan agar dapat kembali ke posisi
[image:32.595.84.525.200.624.2]home.
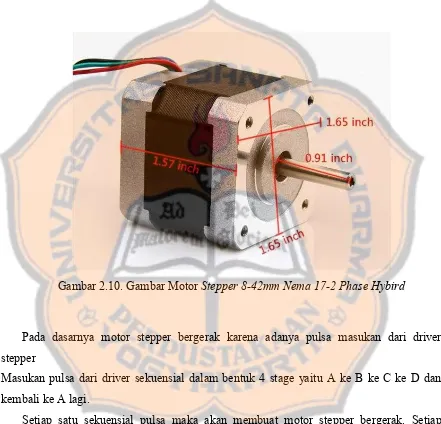
Gambar 2.10. Gambar MotorStepper 8-42mm Nema 17-2 Phase Hybird
Pada dasarnya motor stepper bergerak karena adanya pulsa masukan dari driver stepper
Masukan pulsa dari driver sekuensial dalam bentuk 4 stage yaitu A ke B ke C ke D dan kembali ke A lagi.
2.5.
Torsi
Perhitungan Torsi bergantung pada panjangnya Link dari lengan robot dan berat bebannya.Torsi didefinisikan sebagai mengubah atau memutar kekuatan dan dihitung menggunakan rumus :
(L) lengan Panjang
) ( )
( Gaya F
Torsi L F
(2-1)
Dimana F merupakan gaya berat ( W )
mxa
F (2-2)
g m
W (2-3)
Sehingga.
L g m
(2-4)
Kecepatan tergantung pada model dan spesifikasi dari motor servo dan stepper. Semakin besar daya yang akan digunakan akan mampu mengangkat beban dengan cepat, kekuatan dari motor servo dan stepper juga mempengaruhi berat beban yang bisa diangkatnya. Semakin besar kekuatan servo dan stepper maka semakin besar juga berat beban yang dapat diangkat. Sehingga hasil dari perhitungan torsi akan membantu dalam pemilihan motorservodan motorstepperyang nantinya akan digunakan [10]
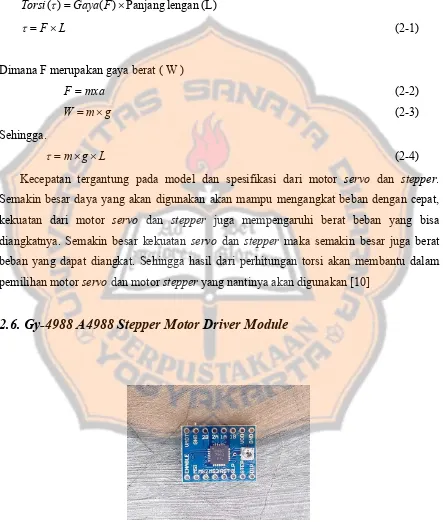
[image:33.595.86.529.183.705.2]2.6. Gy-4988 A4988 Stepper Motor Driver Module
Gy-4988 A4988 Stepper Motor Driver Module seperti yang ditunjukan gambar 2.11. adalah modul penggerak yang digunakan untuk menggendalikan motorstepper mulai dari
full step, half step, 1/4 step, 1/8 step, dan 1/16 step. Kapasitan output driver bisa sampai 35V dan 2A. Karena dapat melakukan hingga 1/16 step maka ketelitian setiap step makin bertambah. Driver ini memiliki internal sircuit protection meliputi thermal shutdown, undervoltage lockout (UVLO) dan crossover-current protection. Sehingga menambah keamanan pada driver motorstepperini [11]
2.7. Kinematika
Fu, K. S.,R. C. Gonzales,C. S. G. Lee (1987).Robotics: Control, Sensing, Vision, and Intellegence, 1st edition mengatakan bahwa “kinematika adalah ilmu tentang gerak tanpa memperhatikan penyebab salah satunya adalah gaya yang mempengaruhinya berhubungan dengan geometri dari gerakan. Dalam mengkaji kinematik perlu dilakukan deskripsi analisis dari penempatan posisi secara spasial dari lengan robot sebagai sebuah fungsi waktu. Secara garis besar, kinematika ini membahas tentang hubungan antara derajat kebebasan masing masingjoint, posisi, serta orientasi dariend-effectorpada lengan robot”. Pada kinematika terdapat dua dasar yaitudirect atauforward kinematics. Dan yang kedua adalah invers kinematik atau arm solution. Yang nantinya akan sering digunakan dalam perancangan lengan robot [12]. Karena Fokus utama inverse kinematik adalah bagaimana
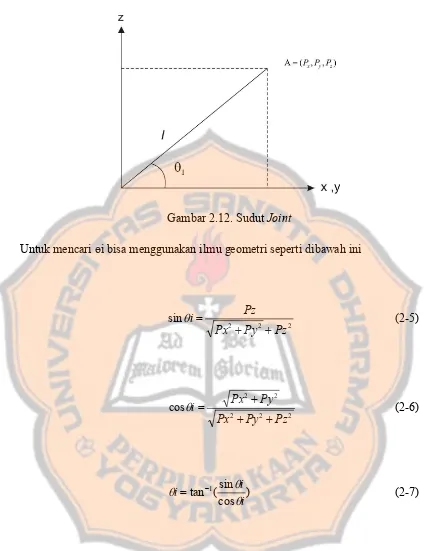
Gambar 2.12. SudutJoint
Untuk mencari өi bisa menggunakan ilmu geometri seperti dibawah ini
2 2 2 sin Pz Py Px Pz i (2-5) 2 2 2 2 2 cos Pz Py Px Py Px i (2-6) ) cos sin ( tan 1 i i i
(2-7)
persamaan trigonometri. Setiap komponen dalam koordinat (X,Y,Z) dinyatakan sebagai transformasi dari tiap - tiap komponen ruang sendi (r,ө). Jari - jari r dalam persamaan sering ditulis sebagai panjang lengan ataulink[1].
Endra Pitowarno dalam menganalisis permasalahan inverse kinematic menggunakan metode geometri. Karena pendekatan geometri dapat digunakan untuk analisis lengan robot satu sendi hingga tiga sendi
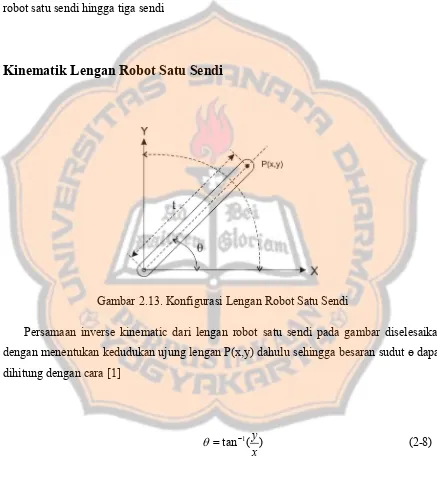
[image:36.595.82.519.198.675.2]Kinematik Lengan Robot Satu Sendi
Gambar 2.13. Konfigurasi Lengan Robot Satu Sendi
Persamaan inverse kinematic dari lengan robot satu sendi pada gambar diselesaikan dengan menentukan kedudukan ujung lengan P(x,y) dahulu sehingga besaran sudut ө dapat dihitung dengan cara [1]
) ( tan 1
x y
(2-8)
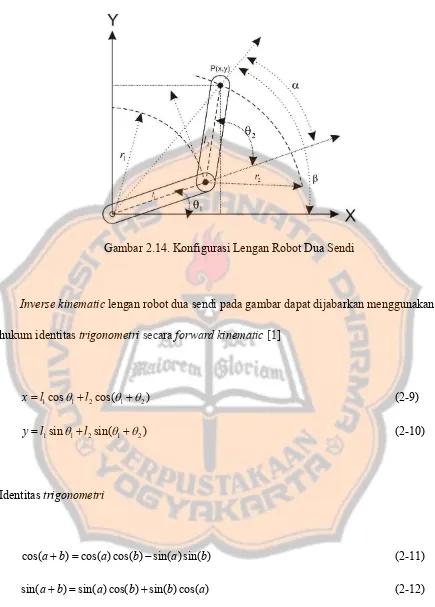
Gambar 2.14. Konfigurasi Lengan Robot Dua Sendi
Inverse kinematiclengan robot dua sendi pada gambar dapat dijabarkan menggunakan
hukum identitastrigonometrisecaraforward kinematic[1]
) cos(
cos 1 2 1 2
1
l l
x (2-9)
) sin(
sin 1 2 1 2
1
l l
y (2-10) Identitastrigonometri ) sin( ) sin( ) cos( ) cos( )
cos(ab a b a b (2-11)
) cos( ) sin( ) cos( ) sin( )
sin(ab a b b a (2-12)
Persamaan (1) dan persamaan (2) dapat ditulis kembali
) sin( ) sin( ) cos( ) cos( )
cos( 1 2 1 2 2 1 2
1 l l
l
x (2-13)
) sin( ) cos( ) cos( ) sin( )
sin( 1 2 1 2 2 1 2
1 l l
l
Dari persamaan diatas dapat dicari 2 dengan mengeluarkan cos2 dari kedua
persamaan dengan operasi pangkat dua pada keduanya sehingga didapat [1]
2 1 2 2 2 1 2 2 2 2 cos
x y
(2-15) Sehingga ) 2 ( cos 2 1 2 2 2 1 2 2 1 2
x y
(2-16)
Lalu sudut1didapat dari,
2 2 2 2 2 cos sin tan l l l dan x y tan (2-17) Sedangkan a
1 (2-18)
Dengan menggunakan identitastrigonometri
) tan( ) tan( 1 ) tan( ) tan( ) tan( b a b a b a (2-19) Didapatkan ) sin . ) cos ( sin . ) cos ( ( tan 2 2 2 2 1 2 2 2 2 1
1
l y l l x l x l l y (2-20)
) sin . ) cos ( sin . ) cos ( tan( 2 2 2 2 1 2 2 2 2 1
1
l y l l x l x l l y (2-21)
Dengan penjabaran trigonometri maka persamaan dan merupakan persamaan dari
inverse kinematicslengan robot dua sendi
) (123
(2-22)
Perhitungan Gir Reduksi
Untuk memperringan dari kerja motor stepper kita bisa menggunakan berbagai macam cara, salahsatunya adalah dengan cara mereduksi beban dengan gir atau roda gigi, dimana dalam penggunaanya harus memiliki minimal dua buah roda gigi. Roda gigi yang pertama nantiya akan diletakan pada beban dan roda gigi kedua akan diletakan pada penggerak. Roda gigi yang menempel pada penggerak juga sering disebutdriver gearataugear pinion
dan roda gigi yang terdapat pada beban juga sering disebutdriven gearatauspur gear.
perhitungan dari reduksi menggunakan dua buah roda gigi dapat dicari dengan cara
Ratio Gear Gear
Spur Gear
Pinion (2-23)
23
BAB III
PERANCANGAN SISTEM
Bab ini menjelaskan mengenai perancangan prototype lengan robot dengan penggerak motor stepper dengan 4 DOF yang dikendalikan oleh mikrokontroler Arduino Uno R3 berdasarkan masukan dari visual basic. Perancangan sistem ini ada dua bagian, yaitu perangkat keras ( hardware ) dan perangkat lunak ( software ). Perancangan pada bab ini dibagi menjadi dua bagian besar yaitu:
1. Perancangan Perangkat Keras
- Perancangan Mekanik Lengan Robot - Perancangan Elektrik Sistem Pengendali - PerancanganHoming sensor
2. Perancangan Perangkat Lunak Sederhana
- Perangkat lunak pengendali motor servo dan motor stepper dengan arduino IDE
3.1. Perancangan Perangkat Keras
Secara garis besar perancangan sistem terdiri dari 2 bagian penting yaitu, perancangan mekanik lengan robot dan perancangan rangkaian elektrik sistem pengendali. Pertama adalah merancang blok diagram keseluruhan sistem, kemudian merancang lengan robot secara matematis dengan menampilkan rancangan 3D dari lengan robot. Tujuannya adalah agar pergerakan mekanik lengan robot dapat terukur dengan baik, dari jangkauan hingga jarak berdasarkan dimensi. Yang ketiga adalah merancang rangkaian elektrik sebagai sistem pengendali dari lengan robot, yang nantinya akan menggerakan motor servo dan motor stepper sebagai keluarannya.
Pada bagian pertama diagram pada lengan robot akan dibuat meliputi beberapa komponen yaitu, komponen penyusun masukan atau pengendali berupa mikrokontroler ATMega 328 pada Arduino Uno R3. Kemudian pengendali dari motor servo dan motor stepper, dan bagian keluaran yaitu motor servo dan motor stepper itu sendiri.
yang menggunakan motorstepperdan motorservosecara lengkap.
Pada bagian ketiga adalah tentang perancangan sistem elektrik, yang digunakan untuk mengendalikan lengan robot, yaitu berupa mikrontroler ATMega 328 yang terdapat pada arduino Uno R3, pengendali motorservodan motorstepper, dan output yang berupa motor
[image:41.595.85.509.191.695.2]servodan motorstepper
3.1.1. Perancangan Mekanik Robot
Secara garis besar perancangan perangkat keras meliputi beberapa komponen utama yaitu masukan dan keluaran. Dimana masukan disini menggunakan mikronontroler ATMega 328 pada arduino Uno R3 dan nantinya diolah dan keluarannya adalah motor servo dan motor stepper. Berdasarkan dari dua komponen utama tadi piranti pengendali pada perangkat keras adalah mikrokontroler dan pengendali motor servo dan motor stepper.
Mikrokontroler sebagai pengendali pertama yang mengolah perintah yang telah diprogram agar dapat terbaca oleh pengendali motor servo dan pengendali motor stepper. Perintah akan diolah oleh mikrokontroler sehingga menjadi data - data berupa posisi gerakan motor servo dan motor stepper. Setelah data diolah pada mikrokontroler maka data tersebut akan dilanjutkan ke pengendali motor stepper atau driver motor stepper. Karena untuk pengendalian motor servo tidak memerlukan driver tambahan maka motor servo akan langsung terkoneksi pada mikrokontroler.
Untuk sumber tenaga pada servo akan dipisah dengan mikrokontroler sehingga tidak membebani kerja dari mikrokontroler. Berbeda dengan servo. Motor stepper harus menggunakan driver tambahan untuk membuatnya bekerja. Sehingga data dari mikrokontoler tadi akan dikomunikasikan ke driver dari motor stepper, dan nantinya akan diteruskan ke motor stepper sehingga motor stepper dapat bergerak.
Gambar 3.2. Blok Diagram Perangkat Keras
di komunikasikan lagi ke pengendali dari motor stepper yaitu driver motor GY-4988. Nantinya keluaran dari mikrokontroler adalah pulsa pulsa yang akan langsung dikirim ke motor servo dari mikrokontroler secara langsung tanpa melalui driver, karena motor servo disini sudah tidak membutuhkan driver lagi. Dan mikrokontroler juga akan mengirimkan sejumlah data step yang nantinya akan diolah oleh driver motor stepper dan akan dikirim ke motor stepper untuk dirubah menjadi sebuah gerakan yang sesuai dengan jumlah step atau pulse yang dikirimkan oleh mikrokontroler.
Motor servo merupakan bagian keluaran atau output dari sistem lengan robot, motor servo menggunakan masukan supply sebesar 5volt yang sudah diberikan secara tersendiri dan tidak menggambil sumber dari mikrokontroler. Masukan motor servo yang berupa pulsa pulsa akan diubah menjadi sebuah gerakan, motor servo berperan sebagai penggerak pada lengan robot, lebih tepatnya untuk menggerakan bagian pergelangan atau pitch yang tersambung pada bagian end effector yaitu bagian spidol atau alat tulis lainnya. Motor servo hanya bergerak naik dan turun agar nantinya bagian end effector dapat bekerja dengan baik
Pada lengan robot ini motor stepper berfungsi sebagai keluaran atau output yang digunakan untuk menggerakan sendi atau joint pada bagian dasar atau base lalu pada bagian bahu atau shoulder dan bagian siku atau elbow. Gerakan motor servo dan motor stepper pada sistem lengan robot memungkinkan untuk lengan robot bergerak dengan 4 derajat kebebasan atau4 DOFyaitu RRRR atauRotation
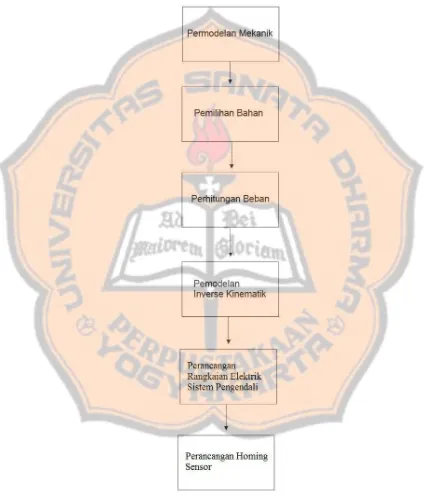
3.1.1.1.
Permodelan Mekanik
Pada lengan robot ini memiliki 4 bagian utama sebagai aktuator yang akan digerakan dengan motor servo dan motor stepper empat bagian penting itu berperan sebagai penggerak dari penghubung ataulink
Pada Gambar 3.3. Akan menampilkan keseluruhan desain perancangan mekanik secara 3D lengan robot beserta empat bagian utama pada robot yang berperan sebagai penghubung ataulinkyang meliputi :
4. Bagian pergelangan (pitch)
5. Bagianend effectorberupa spidol atau alat tulis lainnya (pointer)
Gambar 3.3. Tampilan Desain 3D Lengan Robot
Pada bagian base atau dasar dibuat berbentuk lingkaran yang memiliki diameter 25 cm. Base terhubung langsung dengan as dari motor stepper yang berada di bawah. Base, motor stepper yang berada dibawah base berfungsi sebagai penggerak dari base tersebut. Pergerakan base secara rotasi menyebabkan pergerakan pada lengan - lengan penghubung.
Bagian shoulder memiliki panjang 20 cm yang bergerak secara rotasi dan digerakan menggunakan motor stepper. Kemudian panjang dari elbow adalah 15 cm dan bergerak secara rotasi juga dan digerakan oleh motor stepper.
Pada bagian pitch memiliki panjang lengan 5 cm bergerak secara rotasi dan digerakan menggunakan motor servo. Pada bagian ujung terdapat end effector berupa griper yang disitu terdapat spidol atau alat tulis yang lain, panjang dari spidol tersebut secara keseluruhan adalah 15 cm, namun yang yang dihitung adalah mulai dari ujung spidol hingga batang spidol yang yang dicengkram oleh griper adalah 3 cm.
Keseluruhan dari lengan robot dari pangkal shoulder hingga pada ujung spidol adalah 43 cm. Besarnya dimensi berupa panjang link yang dimiliki lengan robot ini menentukan kemampuan jangkau dari lengan robot ketika sedang melakukan gerakan.
perbedaan sudut pada setiap link dari titik acuan atau shoulder.
Gambar 3.4. Tampilan Posisi Motor Stepper Pada Desain Lengan Robot
Pada Gambar 3.4. Menampilkan penempatan posisi motor stepper pada rancangan lengan robot
Gambar 3.5. Tampilan Posisi Motor Servo Pada Desain 3D Lengan Robot
Gambar 3.5. Menujukan letak dari motor servo yang ditempatkan pada bagian siku atau elbow motor servo disini bekerja sebagai penggerak dari bagian pitch atau bagian pergelangan.
Bagian motor servo ditunjukan pada nomor satu..
pada perancangan lengan robot motor stepper dan motor servo yang digunakan pada setiap joint, berdasarkan pada kemampuannya yang harus dimiliki setiap joint untuk mengangkat beban. Beban dapat berupa lengan penghubung atau link dan benda yang diangkat. Kemampuan motor dalam berputan dengan beban tersebut dinamakan torsi, perkiraan beban pada perancangan lengan robot dapat dilihat pada keterangan penghubung atau link seperti pada Tabel 3.1.
Tabel 3.1. Keterangan Lengan Penghubung (link)
No Link Panjang lengan Berat lengan Beban diangkat 1 Base 25 cm ( diameter ) 208 gr 208 gr 2 Shoulder 20 cm 135 gr 228 gr
3 Elbow 25 cm 75 gr 93 gr
4 Pitch 5 cm 8 gr 18 gr
Pada Tabel 3.1. Adalah perkiraan dari beban lengan yang merupakan total berat dari material lengan tanpa terbeban dari motor stepper, karena motor stepper diletakan pada base sehingga gerak lengan yang diangkat akan lebih ringan dan karena base ditumpu oleh frame dasar dan diberi bearing pada setiap penyangga maka beban kerja dari motor stepper penggerak base menjadi lebih ringan juga. Desain ini bertujuan agar kinerja motor stepper tidak menjadi berat, sehingga saat pemilihan spesifikasi dari motor stepper tidak diperlukan spesifikasi yang tinggi, sehingga biaya pembuatan juga bisa lebih menjadi terjangkau.
Bahan utama dari setiap lengan pada lengan robot ini menggunakan bahan acrylic yang ringan dam mudah dalam pembuatan bentuk dari setiap lengan.
Gambar 3.6. TampilanEnd EffectorBerupaPointerDengan Spidol
Pada Gambar 3.6. Menunjukan beban yang diangkat pada bagian pointer adalah spidol atau alat tulis lainya yang ber ukuran sedang dan menurut Tabel 3.1. Beban pointer memiliki berat sekitar 10 gram
Pada bagian pitch beban yang nantinya akan diangkat adalah sekitar 18 gram. Karena selain mengangkat beban pada bagian pitch sekitar 8 gram juga mengangkat beban pointer sekitar 10 gram, sehingga beban total dari bagian pitch adalah 18 gram . Serta panjang dari pangkal pitch hingga pointer adalah 8 cm
menggerakan bagian pitch berdasarkan persamaan (2-3) dan (2-4) : Kg.cm 0,1472 cm 8 Kg 0,0184 L W Kg 0,0184 N 18 , 0 / 10 Kg 0,018 cm 8 Kg 0,018 gram 8 1 m 2 s m g m W L
Pada bagian elbow beban yang harus diangkat adalah 93 gram, sedangkan panjang dari pangkal elbow hingga ke ujung pointer adalah 33 cm maka kebutuhan torsi pada motor stepper yang digunakan pada bagian elbow dapat dihitung menggunakan persamaan (2-3) dan (2-4) Kg.cm 3,128 cm 33 Kg 0,0948 L W Kg 0,0948 N 93 , 0 / 10 Kg 0,093 cm 3 3 Kg 0,093 gram 3 9 m 2 s m g m W L
Karena pada bagian elbow menggunakan gir reduksi maka perhitungan ratio gear dapat dihitung menggunakan rumus dari persamaan (2-23)
2 : 1 Gear Ratio 2 1 118 59 spur Gear pinion Gear Gear Ratio 118 spur Gear 59 pinion Gear
Karena ratio gear 1:2 , 1 adalah bagian elbow dan 2 adalah bagian motor stepper maka perhitungan torsi menjadi :
cm kg. 564 ,1 2 128 , 3
(2-3) dan (2-4) sebagai berikut : Kg.cm 804 , 9 cm 3 4 Kg 0,228 L W 0,228Kg N 28 , 2 / 10 Kg 228 , 0 cm 43 Kg 0,228 gram 228 m 2 s m g m W L
Karena pada bagian shoulder menggunakan gir reduksi maka perhitungan ratio gear dapat dihitung menggunakan rumus dari persamaan (2-23)
3 : 1 Gear Ratio 3 1 177 59 spur Gear pinion Gear Gear Ratio 177 spur Gear 59 pinion Gear
Karena ratio gear 1:3 , 1 adalah bagian shoulder dan 3 adalah bagian motor stepper maka perhitungan torsi menjadi :
cm kg. 2 , 3 3 8 , 9
Beban maksimal yang bisa diangkat adalah
Gambar 3.7. Tampilan Sumbu Axis (X,Y,Z)
pada Gambar 3.7. Menunjukan tampilan sumbu koordinat dari lengan robot untuk melakukan gerakan rotasi, yaitu rotasi terhadap sumbu X,Y dan Z. Pada base, rotasi yang terjadi menimbulkan perubahan pada sumbu Y kemudian rotasi pada shoulder, pitch dan
elbowmenimbulkan perubahan pada sumbu X dan Z. Keempat bagian itu tadi menunjukan bahwa lengan robot ini memiliki 4 DOF atau4 degree of freedomatau 4 derajat kebebasan. Jarak antara base lengan robot hingga ke meja penggambar sekitar 5cm, jarak ini bisa dipakai sebagai titik referensi untuk menggambar. Spesifikasi dari meja yang dipakai untuk menggambar akan ditunjukan pada Gambar 3.8.
3.1.1.2.
Pemodelan
Inverse Kinematics
Berdasarkan pemodelan mekanik dari lengan robot yang sebelumnya, maka pemodelan kinematik dapat dibuat. Perbedaan dari masing masing lengan dan masing masing sudut padajointdapat dimanfaatkan pada sebuah model perhitungan padainverse kinematicsuntuk menentukan titik koordinat pada ujungend effectoryaitu alat tulis spidol. Pada lengan robot, pergerakan dari lengan dibatasi oleh maksimum sudut yang bisa dicapai oleh motor stepper dan dari desain mekanik lengan robot. Pada Gambar 3.8. Memberikan gambaran dari gerakan lengan robot untuk menentukan batas jangkauan lengan robot. Batas gerakanjointlengan robot berdasarkan putaran motor servo ditetapkan pada Tabel 3.2
Tabel 3.2. Tabel Batasan Gerakan Lengan Robot Berdasarkan Putaran MotorStepperDan Desain Lengan
No. Lengan Panjang (cm) Total Mak. Min.
1 Base - 180° 90° -90°
2 Shoulder 20 90° 90° -0°
3 Elbow 25 180° 90° -90°
4 Pitch 5 180° 90° -90°
5 Pointer 3 0° 0° 0°
Titik referensi dibutuhkan sebagai titik awal mulai membuat gambar pada area kerja. Titik yang diperlukan pada gambar tergantung dari ukuran dimensi gambar. Rencana dari gambar yang akan dibuat sebagai test pada lengan robot ini ada pada Gambar 3.10.
Gambar 3.10. Rencana Gambar Yang Digunakan Sebagai Test Dari Lengan Robot
Berdasar Gambar 3.10. Titik titik hitam adalah referensi saat membuat gambar dari bidang yang diinginkan.
Gambar 3.11. Lengan Robot Tampak Atas
Gambar 3.12. Penyederhanaan Gambar Lengan Robot Dengan Analisa Geometri Untuk Mencari1
alat tulis ujung sampai 3 2 1 pitch l BC elbow l AB shoulder l OA
Pada pembahasan perancangan menurut Gambar 3.12. Panjang dari lengan l1 l2dan l3
tidak ditulis panjangnya karena mengukur inverse kinematics yang diperlukan adalah posisi dari end effector lengan robot yang berada pada koordinat sumbu X dan Y dimana C(Px,Py) cm CD Py cm OD Px 10 20
Dengan aturan segitiga siku - siku menggunakan trigonometri seperti pada persamaan (2-8) sebagai berikut
565 , 26 ) 20 10 ( tan ) ( tan 1 1 1 1 1
PxPy
Dari hasil perhitungan, diperoleh sudut 1 pada koordinat sumbu X dan sumbu Y
Gambar 3.13. Lengan Robot Tampak Samping (X,Z)
Pada Gambar 3.13. Menunjukan Posisi lengan robot tampak samping yaitu pada sumbu X dan Z sehingga panjang dari lengan yang digunakan berdasarkan dari Tabel 3.2. Sebagai berikut
cm pitch
cm elbow
cm Shoulder
8 pointer
25 20
Gambar 3.14 Penyederhanaan Lengan Robot Tampak Samping Pada Sumbu X,Y,Z Untuk Analisis Geometri
Gambar 3.13. Diketahui bahwa cm l spidol pitch BC cm l elbow AB cm l shoulder OA 8 25 20 3 2 1
P(XY,Z) = posisi end effector pada sumbu (X,Y,Z) saat ujung spidol menempel pada papan gambar
Gambar 3.15. Analisa Geometri Lengan Robot Untuk Mencari2 dan3
Perancangan lengan robot pada Gambar 3.15. Berdasarkan end effector di koordinat )
, (XtYt Zt
P yaitu P(20,5). Untuk mencari sudut (2,3,4) diperlukan analisisinverse
kinematics. Sebenarnya banyak solusi untuk menentukan titik akhir yang ditentukan tergantung dari desain lengan robot. Sulosi pertama adalah menggunakan analisia pada konfigurasi lengan robot 2 sendi dengan persamaan (2-16 dan (2-21) pertama dengan cara menentukan posisiend effectorpada lengan 2 (l2) yaitu pada koordinat P(xy,z) penentuan posisi lengan 2 diperlukan untuk mendapatkan sudut. Setelah didapat nilai dari sudut -sudut joint maka selanjutnya dapat dilakukan solusi kedua yaitu dengan analisa -sudut pada konfigurasi langan robot 3 sendi menggunakan persamaan (2-22)
Solusi pertama: cm BD cm OD l effector end P z xy P 5 15 pada koordinat ) 5 , 15 ( ) , ( 2
digunakan untuk mencari besarnya sudut2. Jika persamaan (2-16) digunakan untuk
mencari besarya sudut3 maka hasilnya :
80 , 140 ) 775 , 0 ( cos ) 25 . 20 . 2 25 20 5 15 ( cos ) 2 ( cos 3 1 3 2 2 2 2 1 3 2 1 2 2 2 1 2 2 1 3
xy zll l l
Jadi besarnya sudut 3 yang terletak padajointantarashoulderdanelbowadalah sebesar140,80. Sehingga motor stepper akan berputar keposisi sudut
3
Berikutnya mencari besarnya sudut2 berdasarkan persamaan (2-21)
289 . 69 ) 645 , 2 ( tan ) 80 , 140 sin 25 . 5 ) 80 , 140 cos 25 20 ( 15 80 , 140 sin 25 . 15 ) 80 , 140 cos 25 20 ( 5 ( tan ) sin . ) cos ( sin . ) cos ( ( tan 2 1 2 1 2 3 2 3 2 1 3 2 3 2 1 1 2
xyz ll ll xyzll
Jadi besarnya sudut 2 yang terletak pada joint antara base dan shoulder negatif
karena berada dibawah garis 0°, hasilnya sebesar -69,289°. Sehingga motor stepper pada bagian shoulder akan berputar ke posisi sudut2
Gambar 3.16. Analisa Geometri Lengan Robot untuk mencari 4
Berdasarkan Gambar 3.16. Analisa geometri inverse kinematics digunakan untuk mencari besarnya sudut pada4 dengan persamaan (2-22), sehingga yang diperlukan terlebih dahulu adalah mencari sudut terbesar ditarik darijointpada titik 0 menuju ke setiap lengan (l1,l2,l3) yang terdapat pada titik ABC. Sudut yang terbentuk yaitu sudut 2,
sudut a dan sudut . Pada Gambar 3.16. Sudut terbesar pada ujung lengan 2 (l2) yang terletak pada titik B
Pada analisis sebelumnya menurut Gambar 3.15. Posisi titik P sudah ditetapkan yang berada di titik B yaitu pada koordinat (15,5) sehingga besar sudut dapat dicari dengan persamaan (2-8) 434 , 18 ) 15 5 ( tan ) ( tan 1 1 xy z
Setelah diperoleh besar sudut yaitu 18,434° maka penyelesaian dariinverse kinematicsdapat ditentukan menggunakan pencarian besar sudut 4 yang terdapat pada
jointantara bagianelbowdanpitch. Besarnya sudut sama dengan total sudut2,3,4
sehingga diperoleh besarnya sudut berdasarkan pada Gambar 3.16. Dengan persamaan (2-22) sebagai berikut
4 3
2
077 . 53 ) 80 , 140 289 , 69 ( 434 , 18 ) ( 4 4 3 2 4
[image:59.595.84.523.211.644.2]Jadi besarnya sudut 4 adalah sebesar -53,077°. Hasil yang didapat negatif karena posisi sudut 4 berada dibawah garis 0° dan motorstepperpada bagianlinkdipitchakan berputar ke posisi sudut4
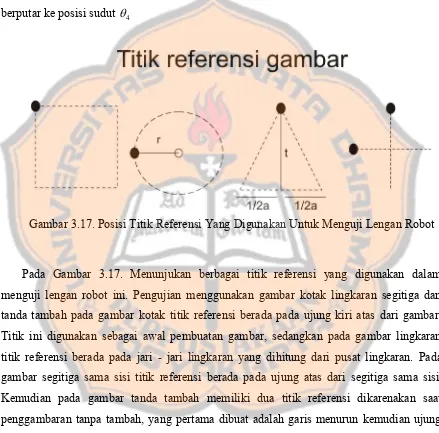
Gambar 3.17. Posisi Titik Referensi Yang Digunakan Untuk Menguji Lengan Robot
Pada Gambar 3.17. Menunjukan berbagai titik referensi yang digunakan dalam menguji lengan robot ini. Pengujian menggunakan gambar kotak lingkaran segitiga dan tanda tambah pada gambar kotak titik referensi berada pada ujung kiri atas dari gambar. Titik ini digunakan sebagai awal pembuatan gambar, sedangkan pada gambar lingkaran titik referensi berada pada jari - jari lingkaran yang dihitung dari pusat lingkaran. Pada gambar segitiga sama sisi titik referensi berada pada ujung atas dari segitiga sama sisi. Kemudian pada gambar tanda tambah memiliki dua titik referensi dikarenakan saat penggambaran tanpa tambah, yang pertama dibuat adalah garis menurun kemudian ujung alat tulis diangkat dan menuju titik referensi kedua untuk membuat garis mendatar. Jika hanya memiliki satu garis referensi maka garis yang dilalui akan menjadi dua kali dan menjadi tidak efisien.
jarak pada bagian kiri adalah 2,5cm pada bagian kanan 2,5cm kemudian pada bagian atas dan bawah adalah 2,5cm
3.1.2. Perancangan Elektrik Sistem Pengendali
Perancangan rangkaian elektrik sistem pengendali lengan robot berbasis motorstepper
dan motor servo terdiri dari beberapa bagian penyusun. Yaitu komponen masukan, komponen pengendali dan komponen keluaran. Perangkat masukan berupa arduino UNO
dan kontroler berupajoystick,kemudian komponen pengendali adalah driver motorstepper
yaituGy-4988 A4988 Stepper Motor Driver Module,sedangkan untuk komponen keluaran adalah motorstepperdan motorservo.
[image:60.595.85.527.206.604.2]Joystick berfungsi sebagai masukan ke arduino yang nantinya akan dilanjutkan ke kontroler driver stepper dan dilanjutkan ke motor stepper dan motor servo dalam bentuk gerakan.
Gambar 3.18. Gambar Rangkaian Elektrik Sistem Pengendali
Keterangan Gambar 3.18.
1. Joystick
2. Arduino UNO R3
3. Gy-4988 A4988 Stepper Motor Driver Module
4. Motorstepper
3.1.3. Perancangan Homing Sensor
[image:61.595.83.533.215.660.2]Homing sensor dibutuhkan karena motor stepper tidak memiliki control close loop atau tidak adanya feedback dan memori posisi sehingga stepper tidak dapat kembali ke posisi semula, maka dibutuhkan sensor untuk menuju posisi home
Gambar 3.19. Gambar sensor homing pada shoulder.
Gambar 3.20. Gambar Sensor Homing Pada Elbow
Keterangan dari gambar 3.20. 1. Trigger sensor 1 2. Trigger sensor 2 3. Sensor homing 4. Sensor warning
Pada bagian elbow hampir sama dengan shoulder. Trigger sensor diberikan pada roda gigi
yang berputar lalu sensor akan diposisikan disamping dari roda gigi yang sudah diberi trigger sensor. Sehingga saat posisi trigger sensor berada tepat didepan sensor, maka akan mengaktifkan sensor homing dan sensor warning pada sistem
3.2. Perancangan Perangkat Lunak Sederhana
Diagram Alir dari sistem perangkat lunak sederhana dapat dilihat pada Gambar 3.22. Perangkat lunak yang digunakan adalahsoftware arduino IDEsebagai mikrokontroler. Dengan komunikasi serial menggunakan USB sebagai sarana pengirim program dari PC ke
Gambar 3.21. Diagram alir Sistem Perangkat Lunak Sederhana
3.2.1.
Software
pengendali motor
servo
dan
stepper
dengan arduino IDE
Gambar 3.22. Merupakan perancangan program tester untuk melakukan test pada lengan robot dengan cara menggambar bidang yang sudah ditentukan. Software Arduino IDE digunakan untuk menuliskan program ke Arduino Uno R3 yang nantinya program akan diolah dan dilanjutkan ke driver motor stepper untuk diubah menjadi gerakan. Program yang nantinya akan dikirim keArduinosudah ada sebelumya, yaitu program yang sudah diubah dari G-code menjadi Program arduino sehingga tinggal memanggil untuk dijalankan.
[image:64.595.86.522.223.623.2]Pemanggilan G-code yang sudah diubah menjadi program arduino dilakukan menggunakan kontroler manual untuk pengujiannya, kontroler disini mempergunakan sebuah joystick yang sudah diubah menjadi kontroler untuk disambungkan ke arduino, yang nantinya akan digunakan untuk memanggil program yang sudah ada.
Gambar 3.23. Gambar Konfigurasi Kontroler
48
BAB IV
HASIL DAN PEMBAHASAN
Bab ini menjelaskan tentang pengamatan dan implementasi dari lengan robot dengan penggerak motor stepper menggunakan mikrokontroler arduino Uno R3. Hasil implementasi dan pembahasan akan dibagi menjadi dua topik, yaitu hasil pengujian aktuator atau penggerak dan perangkat lunak ( source code arduino ), kemudian hasil perancangan pada perangkat keras dan hasil dari pengamatan berupa pengujian dengan menggunakan kontroler
4.1. HASIL PENGUJIAN PENGGERAK
Pada pengujian penggerak akan menjelaskan tentang penggunaan software arduinoIDE
yang dikoneksikan menggunakan kabelUSB kePC. Pada PCaplikasi yang digunakan untuk memprogram arduino adalah aplikasi arduino IDE, data akan dikirim ke mikrokontroler arduino secara serial yaitu berupa data pulsa - pulsa digital yang dapat menggerakan motor
stepper dan juga motor servo. Secara keseluruhan hasil dari pengujian penggerak ini memiliki beberapa tahap yaitu pencocokan antara driver motor stepper yang digunakan untuk menggerakan motorstepper, penyesuaian source code arduino dengan gerakan yang akan dipakai.
Kendala yang muncul adalah cara penyesuaian driver motor stepper yang digunakan dengan motor stepper yang digunakan, penyesuaian yang dilakukan adalah dengan membatasi atau mencari arus keluaran yang pas dengan spesifikasi motor stepper yang digunakan agar nantinya motorsteppertidak kekurangan tenaga ataupun kelebihan tenaga, yang nantinya akan membuat motorstepper tidak dapat bergerak atau malah rusak akibat arus yang keluar daridrivermotorstepperberlebih.
Pada bagian ini faktor utamanya adalah bagaimana menggerakan bagian penggerak atau aktuator pada lengan robot dengan penggerak motor stepper dan motor servo
4.1.1. Pembahasan Pada Program Perangkat Lunak Arduino IDE
Pada penelitian dengan sistem lengan robot dengan penggerak motor stepper dan motor servo, program perangkat lunak arduino IDE digunakan untuk menulis program, pembacaan data serial dilakukan dari perangkat lunak arduinoIDEyang akan dikirimkan ke mikrokontroler arduino. Pengiriman berupa data pulsa - pulsa digital ke mikrokontroler arduino dan nantinya akan diolah dan dikirimkan lagi ke driver motor stepper untuk menggerakan motorstepper. Program yang ditulis pada perangkat lunak arduinoIDE selain pembacaan dan pengiriman data adalah program untuk mengatur kecepatan motorstepper, kemudian step yang digunakan yang mempengaruhi berapa derajat yang dibuat dalam satu step, karena motor stepper dapat menghasilkan step dari full step yang memiliki derajat 1,8° dalam setiap stepnya, kemudian ada half step yaitu setengah dari full step, 1/4 step yaitu setengah dari half step, 1/8 step yaitu setengah dari 1/4 step, 1/16 step yaitu setengah dari 1/8 step, dan terakhir 1/32 step yaitu setengah dari 1/16 step. Karena driver motor
[image:66.595.84.529.273.712.2]stepper yang digunakan bisa mencapai 1/32 step maka nantinya yang akan digunakan adalah 1/32 step sehingga pergerakan akan bisa lebih teliti. Gambar 4.1. Merupakan tampilan umum dari perangkat lunak arduino IDE yang akan digunakan dalam menulis program pada mikrokontroler arduino Uno R3
Sebelum melakukan penulisan program utama untuk menjalankan sistem. Seluruh dungsi dan variable yang digunakan dalam proses pengoperasian program harus dideklarasikan terlebih dahulu. Pendefinisian fungsi dan variable pada sistem lengan robot dengan penggerak motorstepper dan motorservoini merupakan program inisiasi. Inisiasi pada sistem adalah inisiasi untuk library motorservo dan driver motor stepper yang akan digunakan. Inisiasi batasan mapping pulsa pulsa digital yang dapat dibaca motorservodan
[image:67.595.84.516.211.620.2]drivermotorstepper.
Gambar 4.2. di bawah ini adalah contoh dari program untuk menggerakan motor stepper
dengan konfigurasi full step dan berputar searah jarum jam sebanyak 200 step.
Gambar 4.2. Contoh Program Full Step
Dari percobaan yang dilakukan berhasil membuat motorstepperberputar searah jarum jam sebanyak 200 kali dengan radius setiap step adalah 1,8° pada titik pusatnya. Dari hasil yang diamati maka untuk motorstepper dapat berputar satu putaran penuh adalah 200 step jika menggunakan konfigurasi full step.
Gambar 4.3 Konfigurasi Untuk 1/32 step
Tabel 4.1 Konfigurasi Masukan sinyal MS1 MS2 dan MS3
M0/MS1 M1/MS2 M2/MS3 Mikrostep
Low Low Low Full step
High Low Low Half step
Low High Low 1/4 step
High High Low 1/8 step
Low Low High 1/16 step
High Low High 1/32 step
Low High High 1/32 step
High High High 1/32 step
Penempatan kontroler joystick pada arduino adalah pada pin analog 0 (A0) analog 1 (A1) dan analog 2 (A2) pada masing masing pin analog telah dihubungkan ke kontroler sebagai berikut, untuk sudut X maka pin kontroler X dihubungkan ke pin analog 0 (A0) pada arduino, kemudian untuk sudut Y maka pin kontroler Y dihubungkan ke pin analog 1 (A1) Pada arduino sedangkan untuk sudut Z maka pin kontroler Z dihubungkan ke pin analog 2 (A2) pada arduino. Karena pada satu controler hanya terdapat 2 pin analog yaitu Pin X dan Y maka kontroler yang digunakan ada 2 buah kontrolerjoystick pada kontroler pertama akan digunakan sebagai sudut X dan sudut Y sedangkan pada kontroler kedua pin X akan digunakan sebagai sudut Z. Pada gambar 4.4 adalah konfigurasi dari kontroler
joystickpada arduino
Gambar 4.4 konfigurasi kontroler pada arduino
Pada gambar 4.5 akan ditunjukan konfigurasi dari pin MS1 MS2 dan MS3 pada arduino.
sedangkan untuk MS3 pada ketigadriverjuga dijadikan satu yaitu pada pin 6 pada arduino sehingga lebih hemat dalam penggunaan pin pada arduino. Karena pin pada arduino hanya terbatas pada pin digital sebanyak 13 pin dan analog sebanyak 8 pin
Gambar 4.5 konfigurasi dari MS1 MS2 dan MS3 pada pin arduino
Pada gambar 4.6 adalah konfigurasi untuk pin direction pin step dan pin sleep untuk ketiga driver stepper, untuk driver pertama pin direction dihubungkan ke pin digital 2 sedangkan pin step pada driver pertama dihubungkan ke pin digital 3 dan pin sleep pada
driver pertama dihubungkan ke pin digital 7. Konfigurasi untuk driver kedua adalah pada pin direction driver kedua dihubungkan ke pin digital 9 kemudian pin step pada driver
kedua dihubungkan ke pin digital 8 dan pin sleep pada driver kedua dihubungkan ke pin digital 10. Kemudian untuk konfigurasi untukdriver ketiga adalah pada pin directiondriver
ketiga dihubungkan ke pin digital 12 kemudian untuk pin step pada driver ketiga dihubungkan ke pin digital 11 sedangkan untuk pin sleep pada driver ketiga dihubungkan ke pin digital 13.
Gambar 4.6 konfigurasi pin direction, step dan sleep ketigadriver
menggerakan motor stepper maka dibuat jika nilai analog kurang dari 300 maka motor akan berputar CW dan jika joystick dilepas maka motor akan berhenti berputar. Dan jika nilai analog diatas 400 maka motorstepperakan berputar CCW.
Gambar 4.7 program utama penggerak motorstepper
4.2. HASIL PERANCANGAN PERANGKAT KERAS
Pada hasil perancangan perangkat keras akan menjelaskan tentang bentuk mekanik sesungguhnya sistem lengan robot, komponen elektrik sistem lengan robot dan pengujian gerakan mekanik lengan robot. Bentuk mekanik meliputi tampilan dari keseluruhan lengan robot yaitu lengan - lengan (link), posisi motor stepper dan posisi joint sebagai sendinya, kemudian posisi gerakan lengan robot berdasarkan sudut sudutnya. Sedangkan pada komponen elektrik adalah menunjukan komponen komponen pengendali dari motor
4.2.1.
Bentuk Mekanik sistem Lengan Robot
Gambar 4.8 Bentuk Mekanik Lengan Robot
Pada gambar 4.8 ditunjukan bahwa posisi servo yang tadinya digunakan sebagai penggerak pointer ataru alat tulis sudah dihilangkan dan tidak digunakan kembali, penghilangan dari motorservoditujukan agar menghemat pin output dari arduino dan agar lebih mudah dalam pembuatan lengan robot. Penghilangan motor servo juga dinilai lebih menguntungkan dari segi pergerakan. Keberadaan motor servo telah digantikan dengan sistem mekanik yang nantinya akan membuat pointer atau alat tulis dapat berada pada sudut kemiringan 0° walaupun lengan bergerak naik maupun turun, sehingga nantinya
Gambar 4.9 Bentuk Mekanik Lengan (link)
Tabel 4.2 SpesifikasilinkLengan Robot No Lengan Penghubung (link) Panjang lengan
1 Base 25 cm ( diameter )
2 Shoulder 20 cm
3 Elbow 25 cm
4 Pitch 5 cm
Gambar 4.10 Posisi motorsteppersebagai penggerak lengan robot
Keterangan :
Gambar 4.11 posisi motorstepperpenggerakBase
Keterangan
3. MotorBase 4,4Kg.cm ( 2,8 volt )
Posisi motor stepper secara mekanik ditampilkan pada gambar 4.10 dan gam