INTEGRA
EXAMPL
a
Departm
b
Departmen
KEY WORD
ABSTRACT:
3D Laser scan Especially for appreciated so kind of standa In some cases existing data f merging of the the quality of t For a research by a team of r about building different laser provenance ha
The traditiona unknown par therefore not initiative of th cooperation b Jeddah and th established in and Analysis (DATARSA). traditional bu Therefore stud to detailed ana
In autumn 20 Traditional A Archaeology i of the coopera details of the methods for th side. Within t Balad, in the interdisciplina architects and traditional bui
ATION OF
LE OF A T
ment for Histo
nt of Architec
c
Depart
S: 3D Laser Sc
:
nning technolo r the survey o ources for resea ard procedure fo
more than one from a part of t e datasets may
the result. h about the trad researchers of th g archaeologica
r scanners. Usi as been develop
1. INTR al architecture rts of the w documented ye he Higher Min between King he Vienna Uni
2011 and with of Tradition The aim of uilt environmen
dies have been d alysis of the ma
011 the projec Architecture R in Saudi Arabia ational works w historic buildin he building arch this frame the historical part ary teams (a d an anthropo lt environment
F THREE D
TRADITIO
U. H
ory of Architec
cture, Faculty
tment of Geode
canning, data m
ogy gained mor f heterogeneou arch in architect or objects of dif e team records a
the object that c become challen
ditional architec he Vienna Univ al research has b ing these data ped which will b
RODUCTION of Saudi Ar orld’s architec et. Within the istry for Educa Abdul Aziz versity of Tech the research pr nal Architectur the project is nt following a done in scales f aterials and cons
ct started with Recorded by M
a (TRABASA) was the transfe ngs in Jeddah haeological res research of th of Jeddah has architects, geo
ologist) differ have been inve
DIMENSIO
ONAL RES
SA
Herbig a, I. May
cture and Buil
baugeschof Environme
hmo
esy and Geoinfo tpCom
merging, Saudi A
re and more im us surfaces and ture. Therefore fferent scale, sh an object with can’t be access nging, especiall
cture of Saudi A versity of Techn been conducted a possible app be outlined in th
N
rabia is one o ctural heritage frame of a res ation Saudi Ara University (K hnology (VUT roject Documen e of Saudi A
the research o a holistic appr from urban stru
struction of obj
the joint wor Means of Bu ) in Jeddah. Th r of knowhow from KAU sid search from the he architecture s been conduct
odesists, land ent aspects o estigated.
ONAL DAT
SIDENTIAL
AUDI ARAB
yer a, H. Mortad
lding Archaeo
[email protected]ental Design, K
[email protected]
ormation, Vienn pe_scathe@gmxmmission V, WG
Arabia
mportance for t d complex stru the integration hape, age and or different devic sed anymore, bu
ly if one survey
Arabia a buildin nology. Within d. A part of the
proach for the his paper.
of the e and search abia a KAU), T) was
ntation Arabia of the roach. uctures jects.
rkshop uilding he aim about de and e other in Al ted. In dscape of the
F
One resid build traini introd histor
TA FROM
L BUILDIN
BIA
da b, S. Rasztov
ology, Vienna
uwien.ac.atKing Abdul A
du.sa
na University o x.at
G V/2
the recording a uctures it is a n of laser scanni
rigin.
es using alterin ut is important y is not docume
ng in the histor this frame a w results consists
registration of
Figure 1. Resid centre of
important par ential building ding archaeolog
ing sessions, duced to recor ric architecture
M UNKOWN
NG IN
AL-vits c
University of
Aziz University
f Technology, A
and documentat fast and reliab ing as a part of
ng approaches. F to be integrate ented in detail,
ic part of Jedda orkshop for stu s of two sets of f scan data fro
dential building f Jeddah, KAU; © Irmengard
rt was the do in the heart of A gical survey.
staff and stu rding and docu used by the VU
N ORIGIN
-BALAD, J
f Technology,
ty, Jeddah, Sau
Austria -
ation of archite ble option for f the building su
For example a ed into the over in particular wh
ah has been sur udents of the Ki f laserscan data om different an
Al Nawar, in th ; 4 images stitc d Mayer
ocumentation o Al Balad as sta In theoretical udents of KA umentation met UT team. Ther
N ON THE
JEDDAH,
Austria -
udi Arabia -
ctural heritage. survey and so urvey became a
client provides rall survey. The hen it comes to
rveyed in detail ing Abdul Aziz a, recorded with nd/or unknown
he historic hed
of an ordinary arting point of a and practical AU have been thodologies for eafter the work . o a
s e o
l z h n
of building r collaborative w a joint campa object compile book mapping material will b
Beside further book, catalogu the terrestrial by tachometri was done. In done with a Le
The tachomet around the sur integration of tracks all nece with the Z+F The recording was done in s practice. The cross section special softwa Automated L University Bo all rooms and 5006i.
A team from hardly to surv narrow situatio with a Leica observed by th in the Leica p Leica Scan St to bring the da with a one-we
Figure 2.
research in th work of KAU s aign. The build ed in plans, a g each wall wi be the base for t
2. DATA r documentatio ue of features et
3D-Image-Sca ic survey with
addition to thi eica Scan Statio
tric survey sta rveyed resident
all other collec essary control p Imager 5006i a g of the polygon simple sketches horizontal sec
were measure are (TOTAL - Laser Measure ochum, German d facades have b
KAU surveyed vey by total sta on. The control
Scan Station he total station. proprietary form
ation and the a ata somehow in eek test license.
Point cloud of A Z+F Imag
he house was students and the ding survey cov catalogue of op ith its materials the restoration o
A AQUISITIO n (e.g. photo d tc.) a three dim anner Z+F Ima a motorized L s 3d-survey so on C10by KAU
arted with pol ial building as cted data. Startin points for the lat
and rectified im n track and the c s made by han ctions in all flo
ed with the to Tachometric O ement develop ny). Along the been scanned w
d the southern ation due to th l points used for
differed from The data were mat. Since the V associated softw nto a readable fo
Al Nawar hous ger 5006i © VU
done in inte e VUT research vers all parts o penings, and a s and damages of the building.
ON
documentation, mensional survey ager 5006i supp Leica TCRM 1 ome scans have U.
ygon tracks in base for the ge ng from this po ter 3D laser sca mages were surv control points o nd like it is com
oors as well a otal station us Object-Oriented ped by the
longitudinal se with the Z+F Im
staircase which he very comple
r the survey by m the control p
handed over to VUT does not o ware it was nece ormat. This was
e, surveyed wit UT
ensive hers in of the
room . This
room y with ported 1203+ e been
n and odetic olygon anning veyed. on site mmon as one sing a d Semi
Ruhr ection mager
h was ex and y KAU points o VUT own a essary s done
th
3
Thus first data targe each regis of th to be surve list ar
Since differ all th (sma room point With with spher one r (Figu simp appro resul some etc.). absol these consi aimin geod
3. PRECOND
s, each scannin all single TLS format like a ets has to be id scan at least t tration. The mo e registration w e exported int eyed by total st re named corre
4. THE e the obtained rent instrument hese data was n ll black/white ms for the resa
ts were also u hin a local coor a total statio rical. When per room) only a su ure 1). The docu
le sketches m oach and under
ted in drawin etimes inconsis This caused lute orientation e problems a fu idering geome ng to identify c etical survey or
Figure 3. Blu
Magenta - vi
Red - automat the contro
ITIONS AND ng company ha scans has to be scii(*.xyz). Af dentified inside
three targets ar ore targets are i will be. A targe
to an ascii-file tation (ascii-fil ctly an automat
E APPROACH d TLS and tot ts surveyed by ecessary. As m targets) were ampling of rec used for the re
dinate system a on and the co
rforming a sing ubset of all mea umentation of t made by diffe rstanding of the ngs of signific tency (identific many problem n of the single ull automatic ap etric informatio corresponding c
r other scans.
ue - control poin with total st sible control po to be regist tically aligned T l points surveye
DATA PREP as its proprieta e transformed i fter the export each single po re absolutely n identified the b et list for each p le (*.xyz). If le, *.xyz) and o
tic computation
H FOR TRABA tal station dat
different teams mentioned above installed at th ctified images. egistration of a polygon track ontrol points w gle scan (e.g. in asured control p the control poin erent people e importance of cantly deviatin cation problem ms at the comp TLS scans. In pproach was im on between c control points d
nt coordinates s station. oints in one sing stered.
TLS control po ed with total sta
ERATION ary file format,
into a common t, the installed oint cloud. For necessary for a better the result point cloud has the target list one scan-target n is possible.
ASA
ta derive from s, the merge of e control points he walls of all These control the TLS data. k was surveyed were measured n the corner of points is visible nts was done in with different f a sketch. This ng quality and ms, ambiguities, putation of the order to avoid mplemented by control points, deriving from a
surveyed
gle scan,
oints onto ation.
, n d r a t s t t
Figure 3 is st between a sin needs to be e single TLS s transformation similarity tran point sets (A, B
A =
where m = R = T = t
Considering t unknown para number of thre
Figure 4.Ident a two
With the help targets were coordinates of Figure 4). The coordinate sys
F
tating the prob ngle TLS scan stimated. In or can to the tot n parameters n
nsformation b B) is given by (
m*R*B+T
a scaling factor the rotation ma the vector of sh
the euclidean ameters. They ee non collinear
tification of all o-storey room a
p of the open s selected in f these targets e coordinates of stem.
Figure 5. Descri
blem. The unkn and the realize rder to achieve tal station data needs to be p etween two g (Eq.1)[Kraus].
r, atrix hift.
3D space, (E can be estima r point correspo
visible targets and the adjacen
source software each single T
readout into a f these scans ar
iption of the alg
nown transform ed coordinate s
the orientation a, the estimati performed. Th given correspo
q.1) contains ated, if a min ondences are pr
in one single sc t court yard
e CloudCompar TLS scan and a text file (com re in the scanne
gorithm
mation system n of a ion of he 3D onding
(1)
seven nimum resent.
can of
are the d the mpare er own
Figur point betw coord is lin simp thresh corre facto stand Possi With mode trans comp numb the trans funct nonli taylo coord adjus param descr insid algor invol param
The p the c ment point unkn (B) a possi addit point In ou
Cons adjus The comp aimin ( ∑
wher
wher
The a estim elem insid ( causi
re 5 is describ t correspondenc een pairs of all dinate lists (A, nearly scaled b le lookup of co hold amount esponding rows or to be smaller dard deviation
ible correspond h those possib el of the sim formation para puted by adjusti ber of three co matching ma formation par tional model be inear, we need or series. Bec dinate frames stment with g meters. Therefo ription is give e the matchin rithm, by cons lved in the co meters.
points inside th coordinate syste tioned above, o ts (three R3 po nown transforma are now in a ible to find add tional correspon ts inside (A) an ur case, we chos
sidering those a stment, the initi refinements r puted considerin ng to minimize
→ ).
re A = jacobi x = vector l = observ v = correc
∗
re N^-1.. inv
accuracy of ind mated via the u ents inside the e (3). Consid increases ( ing a reduction
bing the algori ces in 3D spac possible comb B). The size of by the amount
rresponding dis , it is po inside both dis r than 2 ∗
of our TLS in dences are store le corresponde milarity transfo ameters, as wel ing all observat orresponding ra trix (M), a ameters can etween the param
a linearization ause high ang
can occur, it good initial e ore we used a q
n in [Horn]. D ng process, w sidering the re
omputation of
he TLS scan (B em (A) with th only the minim oints) was used ation parameter common coor itional points th ndence is assum d (B) is under a se to be 3∗
additional obser ial transformati respective para
ng the over-det the sum of sq
i matrix, r of unknowns
ation vector tion vector
∗ ∗ ∗
verted normal-m
dividual transfor unit weight coe e inverted norm ering more ob (enlargement o
of the unit we
ithm of autom ce. An euclidea binations is com f the resulting d of given data stances (B in A ossible to ide stance matrices
, where nstrument (in o ed in the matchi ences and the ormation, a so ll as residual v tions. By select andom sample solution of be estimated. meters and the of the function ngle rotations t is necessary estimates of quaternion trans
Due to distan we performed emaining point f the initial so
B) can now be he possible initi mum and necess d for the comp rs. Thus, points rdinate frame hat are close to umed, if the dis a certain thresh
.
rvations inside ion parameters ameter update termined equat quared observat
∗ ∗ ∗
matrix
rmation parame efficient (4) an mal-equation m observations, th of three per ob eight coefficient
matically match an 3D distance mputed for both distance matrix a points. Via a A) with a certain entify possible s. We chose the is the a priori our case 3mm). ing matrix (M). e mathematical olution of the vectors, can be ing a minimum matches inside the unknown Because the observations is nal model by a between both y to start the the unknown sformation – its ce ambiguities d a RANSAC ts that are not olution of the
transformed to ial solution. As sary amount of putation of the s inside (A) and and it is now each other. An stance between hold value ( .
a least squares can be refined. s (3) can be ion system (2), tion corrections
(2)
∗ ∗ ∗ (3)
eters (5) can be nd its diagonal matrix N ( ) he redundancy bserved point), t respective the h e h x a n e e i . . l e e m e n e s a h e n s s C t e
o s f e d w n n .
s . e , s
)
where v = c P = W n =n u =n
where qxk qkk
Selected targe matched to th the total-statio algorithmic (e scan), those a transformation
As mentioned distances in tw that the distrib are nearly un approach wou the resulting parameters. In project, the d unique per eac
5
This chapter from the appro
Fig
Starting with g by a single TL parameters a unknown tran magenta line), vectors of a coordinate list
∗ ∗
correction vecto Weighting matr number of obser number of unkn
∗
= mean error o = diagonal elem
et coordinates ( e list of total s on coordinate e.g. the target
dditional point n parameters of
d above, the wo lists of coo bution of distan nique. Consider uld run fail in o non-unique n practice as w distance pattern ch scan.
5. RESULTS shows some a oach mentioned
gure 6.Automati
given manually LS scan) (Fig. 6 are computed nsformation par
, a matching/co single scan w t are computed. or rix rvations nowns
f one single unk ment of the inve
(from a single station coordina list (A). When coordinates of s can support t f further scans.
approach trie ordinates. There
nces inside the ring (e.g.) vert order to the dis solution of well as the hand n of the targe
AND SIMULA chieved results d above .
ically aligned T
y selected contr 6 blue dots), the in automatic rameters (Fig. 6 rrespondence li with reference
known erted normal m
scan), that wer ates, are append n applying the f an additional the estimation
es to find ide efore, it is nece two coordinat tices of a cube stance ambiguit the transform dled data insid t points was n
ATION s that were obt
TLS points
rol points (origi e final transform cally manner. 6 represented b ist as well as re
to the total s (4)
(5)
matrix
re not ded to same l TLS
of the
entical essary te lists e, this ty and mation de this nearly
tained
inated mation The by the esidual station
Fig
After comp comp three
Figu
In or way, rando point rotati norm done axis distan selec scena
gure 7. Comput ap transformatio
r the estimation pleted, final re puted. Figure 7 e coordinate axi
ure 8. Length o
rder to check t we designed omly selected p ts are then tra ion matrix. To mal distributed
by applying a and a linear sc nce between th cted points) and
arios by conside
ed components pplying the fina on between corr
n of the unknow esiduals of po
shows the coor s for each point
f the residual ve points
the described a some test-cases points out of the nsformed by a o achieve real noise to the se standard-devia cale factor [ppm
he center of gr d each single po ering five rando
s of the residual al (adjusted) rresponding poi
wn transformat oint correspond ordinate differen t correspondenc
vector between c s
algorithm in a s. Therefore, w e whole tachym a random shift conditions, w elected coordin ation of 3[mm] m], that was co gravity (with re oint. Figure 8 sh om point corres
l vectors after
nt pairs.
tion parameters dences can be nces among the ce.
corresponding
more detailed we chose some meter list. Those ft vector and a we added some nates. This was per coordinate orrelated by the eference to the hows some test spondences.
s e e
The final imp with target po photogrammet angles and di process.
The described transformation coordinates an well among t potential to be in already exis
This work w Prince Abdul A
For the buildin special acknow this distinctive Eng. Sami Na also as the rep for his tremen of this special
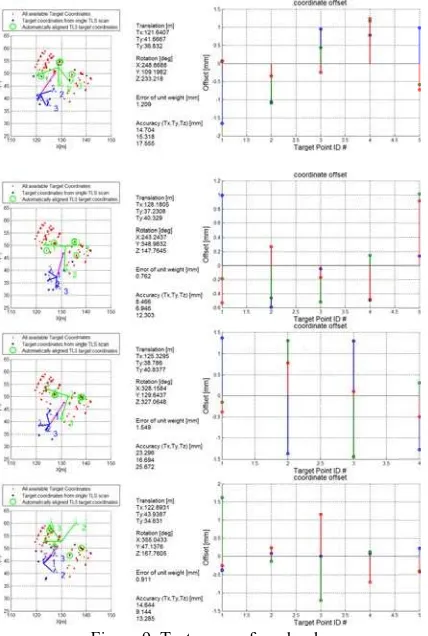
Figure 9. Tes selected co
6. CO plementation of oints with diffe
tric point clou istance ratios c
d approach (c n parameters nd totalstation the considered e realized in a s sting software t
Ackno was financed b Aziz University
ng survey on th wledgements fo e building. A s awar as the repr
presentative of ndous support i example of Jed
st-cases of rando oordinate subse
ONCLUSION f the algorithm erent scale (e.g uds). Instead o can be used f
hapter 4) estim between s target coordina d data inside t
tandalone appli ools to support
owledgement by the Kingdo
y in Jeddah.
he Al Nawar ho or direct involve
pecial thank ha resentative of t
the owners of in the work for ddah’s architect
omly ets
mic should work g. relative orien of distances, re for the identific
mates the unk ingle TLS ates. It works this project an ication or as a p
further process
m of Saudi-A
ouse we want ex ement in the wo as to be expres the municipality
the Al Nawar r the building s tural history.
k also ntated elative cation
known target pretty nd has
plugin sing.
Arabia,
xpress ork on sed to y, and house survey
Bokh of Je
the M
Camb Plann
Harro
Howe
Herb Herit
Herit
Saud Antiq
Herb Aydı recor Work
Photo Scien Symp
King L.B.
Krau
Infor
de Gr
Horn orien
Socie
642
Siegh
Saud
Tech Build
Styhl Part o Herit
Cultu
07.11
Toub Yam M., UNE docu Budd
Yutak Prese Oct.
hari, Abdulla Y ddah. In Adapti
Modern Urban
bridge, Mass. ning, USA.
ow, L., Larkin
ell’s Jiddah, Sc
ig, U., 2012. tage and their
tage: Research
di Commission quities, Damma
ig, U., Jäger-K ın, G., 2013. rded by Means kshop in Jed
ogrammetry, R nces, Volume X posium, 2-6 Sep
g, G. 1998.The Tauris& Co Lt
us K., 2004. Pho
rmationen aus P
ruyter, Berlin, G
n B. K.P., 1987. ntation using un
ety of America,
hartsleitner, A
di Arabiens,
hnology, Depa ding Archaeolo
ler-Aydın, G., of an Integrativ tage; Invited P
ural Heritage a
1.2012, in print
bekis, G., May auchi, K., Tan Jansen, M., 20 ESCO world
mentation and dha figures an
ka (Ed.): 'Dig entation of Cul
2009 in Kyoto,
Referen ., 1983. Conser
ive Reuse: Integ Fabric. Marg
: MIT Labor
n, C., 1984. C corpion Publish
Interdisciplina Role for World
hpapers on A
for am, 1434H, 201
Klein, C., May TRABASA of Building A ddah. In: Inte
Remote Sensin XL-5/W2, 2013 ptember 2013, S
Traditional A
d., London, GB
otogrammetrie B Photographien u
Germany.
Closed-form s nit quaternions. Vol.4, 1987, W
A., 2010. Trad Diploma The rtment for H gy, Vienna, Au
Mayer, I., 201 ve Building Surv Paper at: 17th
and New Techno
yer, I., Döring iguchi, Y., Mo 009. Preservati heritage site d virtual recon nd the archaeo
gital Docume ltural Heritage'
Japan
nces
rvation in the H
grating Traditio
garet Bentley S ratory of Arc
City of the Re
hing Ltd., Londo
ary Approache ld Heritage Site
Architectural H
Tourism 12, page 263-28
yer, I., Mortad – Traditiona Archaeology in
ernational Arc ng and Spatia 3, XXIV Inter Strasbourg, Fra
Architecture of
B.
Band 1.Geome und Laserscann
solution of abso In: Journal of t Washington D.C
ditionelleBaufo
esis, Vienna History of Arc
ustria.
2. 3D Laser M vey for the Rec
International nologies, Vienn
g-Williams, M orimoto, S., Pet ion and mana of Bamiyan nstruction of ological remai
entation, Inte ' , CIPA Sympo
Historic District
onal Areas into
Sevcenko, (ed). chitecture and
ed Sea, David
on, GB.
s to the Built es Research &
Heritage/ The
m and 85
da, H., Styhler-l Architecture n Saudi Arabia:
chives of the al Information national CIPA ance
f Saudi Arabia,
trische neraufnahmen,
olute
the Optical
C, page
629-ormenimWesten
University of chitecture and
Measurement as cording of Built
Conference on
a, 05.11.2012
-M., Maeda, K., tzet, M., Jarke, gement of the n: Laser scan the destroyed ins.In: Takase,
erpretation & osium , 11 - 15
t
o
. d
d
t
&
e d
-e
:
e n A
,
n
f d
s t
n
-
, , e n d