TERHADAP EFISIENSI DAN TORSI MOTOR DC PENGUATAN
KOMPON PANJANG DENGAN MOTOR DC
PENGUATAN KOMPON PENDEK
(Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU)
Rizky Hardiansyah, A. Rachman Hasibuan Konsentrasi Teknik Energi Listrik, Departemen Teknik Elektro
Fakultas Teknik Universitas Sumatera Utara (USU) Jl. Almamater, Kampus USU Medan 20155 INDONESIA
e-mail: [email protected]
Abstrak
Pengaturan posisi sikat berpengaruh pada kinerja dari suatu motor DC. Maka dengan mengatur letak sikat pada komutator, akan diperoleh efisiensi dan torsi yang paling baik dari motor DC tersebut sehingga dapat bekerja dengan lebih baik. Pada tulisan ini, penulis menganalisis perbandingan pengaruh posisi sikat terhadap efisiensi dan torsi motor DC penguatan kompon panjang dengan motor DC penguatan kompon pendek. Berdasarkan hasil penelitian, sudut sikat sebesar 30° di sebelah kanan dari posisi tengah menghasilkan efisiensi dan torsi tertinggi pada masing-masing jenis motor DC yang diuji. Pada motor DC penguatan kompon panjang diperoleh efisiensi dan torsi tertinggi sebesar 47,316 % dan 6,747 N-m. Sedangkan pada motor DC penguatan kompon pendek, diperoleh efisiensi dan torsi tertinggi sebesar 46,843 % dan 7,099 N-m.
Kata Kunci: motor DC kompon, posisi sikat
K
1. Pendahuluan
Motor DC sangat banyak digunakan dalam bidang industri. Penggunaan motor DC dapat dijumpai misalnya sebagai motor penggerak beban mekanik. Motor DC yang digunakan di bidang industri pada umumnya memiliki kapasitas daya yang relatif besar dan disesuaikan dengan beban mekanis serta jumlah produksi yang diinginkan. Untuk itu sebuah motor DC harus memiliki efisiensi dan torsi yang tinggi.
Salah satu jenis motor DC yang banyak digunakan adalah motor DC penguatan kompon. Motor DC penguatan kompon ada dua jenis yaitu motor DC penguatan kompon panjang dan motor DC penguatan kompon pendek.
Tujuan dari penelitian ini adalah untuk mengetahui perbandingan pengaruh posisi sikat terhadap efisiensi dan torsi motor DC penguatan kompon panjang dengan motor DC penguatan kompon pendek.
Pada penelitian ini rugi besi dan rugi-rugi gesekan pada motor dihitung berdasarkan data-data yang diperoleh dari hasil pengujian
pada kondisi tanpa beban, sedangkan rugi-rugi sikat pada motor diabaikan.
2. Motor DC Penguatan Kompon
Motor DC adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Berdasarkan fisiknya motor DC secara umum terdiri atas bagian yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat [1].
Motor DC bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Ketika kumparan medan dan kumparan jangkar dihubungkan dengan sumber tegangan DC, maka pada kumparan medan mengalir arus medan (If) pada kumparan medan, sehingga
menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan. Sedangkan
pada kumparan jangkar mengalir arus jangkar (Ia), sehingga pada konduktor kumparan jangkar
timbul fluksi magnet yang melingkar. Fluksi jangkar ini akan memotong fluksi dari kumparan medan sehingga menyebabkan perubahan kerapatan fluksi dari medan utama. Sesuai dengan hukum Lorentz, interaksi antara kedua fluksi magnet ini akan menimbulkan suatu gaya mekanik pada konduktor jangkar yang disebut gaya Lorentz. Besar gaya ini sesuai dengan persamaan 1 berikut [1]:
F = B . i . l (1) Dimana :
F = gaya yang bekerja pada konduktor (N) B = kerapatan fluks magnetik (Wb/m2) i = arus yang mengalir pada konduktor (A) l = panjang konduktor (m)
Arah gaya ini dapat ditentukan dengan kaidah tangan kiri Flemming. Kaidah tangan kiri menyatakan, jika jari telunjuk menyatakan arah dari vektor kerapatan fluks B dan jari tengah menyatakan arah dari vektor arus I, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut [2].
Gaya yang timbul pada konduktor jangkar tersebut akan menghasilkan momen puntir atau torsi. Torsi yang dihasilkan motor dapat ditentukan dengan persamaan 2 berikut [3]:
Ta = F . r (2)
Dimana:
a
T = torsi jangkar (Newton-meter) r = jari-jari rotor (meter)
Apabila torsi start lebih besar dari torsi beban, maka motor akan berputar.
Prinsip kerja motor DC dapat dilihat pada Gambar 1 berikut:
Gambar 1. Prinsip perputaran motor DC [1] Berdasarkan sumber tegangan penguatnya, motor DC dibagi menjadi dua, yaitu motor DC penguatan terpisah (penguatan luar) dan motor DC penguatan sendiri. Salah satu jenis motor DC penguatan sendiri adalah motor DC penguatan kompon. Motor DC penguatan
kompon merupakan gabungan motor DC penguatan seri dan motor DC penguatan shunt. Motor DC penguatan kompon dapat dibagi menjadi dua yaitu sebagai berikut:
1) Motor DC Penguatan Kompon Panjang Pada motor DC penguatan kompon panjang, kumparan medan serinya terhubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt. Rangkaian ekivalen motor DC penguatan kompon panjang dapat dilihat pada Gambar 2:
+ -Vt E a Ra Ia IL + -Rsh Ish Is Rs
Gambar 2. Rangkaian ekivalen motor DC penguatan kompon panjang [1] Dari Gambar 2 di atas, diperoleh persamaan tegangan terminal motor DC penguatan kompon panjang seperti ditunjukkan oleh persamaan 3:
Vt = Ea + Ia (Rs + Ra) (3)
2) Motor DC Penguatan Kompon Pendek Pada motor DC penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medan shunt. Rangkaian ekivalen motor DC penguatan kompon pendek dapat dilihat pada Gambar 5:
+ -Vt E a Ra Ia IL + -Rsh Ish Is Rs
Gambar 3. Rangkaian ekivalen motor DC penguatan kompon pendek [1] Dari Gambar 3 di atas, diperoleh persamaan tegangan terminal motor DC penguatan kompon pendek seperti ditunjukkan oleh persamaan 4:
Vt = Ea + Is.Rs + Ia.Ra (4)
Dimana:
Vt = tegangan terminal jangkar motor arus
searah (Volt)
Ea = gaya gerak listrik lawan motor arus
searah (Volt)
Is = arus kumparan medan seri (Ampere)
Rs = tahanan medan seri (Ohm)
Ia = arus jangkar (Ampere)
3. Mengubah Posisi Sikat Pada Motor DC Salah satu faktor yang paling penting agar motor DC dapat bekerja dengan memuaskan adalah kemampuan untuk meneruskan arus-arus yang diperlukan oleh jangkar melalui kontak sikat pada komutator tanpa terjadi bunga api dan tanpa rugi-rugi serta pemanasan yang berlebihan pada sikat dan komutator. Bunga api dapat menyebabkan kerusakan dan keausan baik pada komutator maupun sikat [4].
Bunga api ini timbul akibat adanya reaksi jangkar pada motor DC. Reaksi jangkar adalah reaksi yang ditimbulkan pada jangkar akibat adanya interaksi antara fluks magnetik di kumparan medan dengan fluks magnetik di kumparan jangkar. Salah satu cara yang dapat dilakukan untuk mengurangi reaksi jangkar adalah dengan mengubah posisi sikat pada motor DC tersebut. Untuk menentukan sudut peletakan posisi sikat pada komutator dapat dilihat seperti Gambar 4 berikut :
0° +20° +10° +30° -10° -20° -30°
Gambar 4. Posisi sikat pada motor DC [5] Pada keadaan normal, biasanya sikat ditempatkan pada posisi 0°. Posisi sikat pada motor DC dapat diletakkan di sebelah kanan sudut 0° ataupun di sebelah kiri sudut 0° sesuai sudut yang diinginkan. Pengaturan letak posisi sikat selain dapat mengantisipasi reaksi jangkar, juga berpengaruh pada unjuk kerja serta efisiensi dari motor tersebut [6].
4. Analisis Perbandingan Pengaruh Posisi Sikat Terhadap Efisiensi dan Torsi Motor DC Kompon Panjang Dengan Motor DC Kompon Pendek
Efisiensi motor DC adalah persentase keefektifan suatu motor DC untuk mengubah energi listrik menjadi energi mekanis yang berupa putaran. Sedangkan torsi motor DC adalah putaran atau pemuntiran dari suatu gaya terhadap poros motor DC.
Untuk menganalisis hubungan antara posisi sikat terhadap efisiensi dan torsi pada motor DC kompon panjang dan motor DC kompon pendek, maka dilakukan pengujian dengan mengubah
posisi sikat motor pada kondisi tanpa beban dan kondisi berbeban. Untuk mengubah posisi sikat pada motor, perlu ditentukan beberapa titik sudut perubahan posisi sikat. Pada penelitian ini, dilakukan pengujian dengan tujuh titik sudut, yaitu titik di posisi tengah atau 0° diikuti tiga titik di sebelah kiri (-30°, -20° dan -10° dari posisi tengah) dan tiga titik di sebelah kanan (+10°, +20° dan +30° dari posisi tengah).
Motor yang digunakan pada pengujian ini adalah motor DC AEG tipe Gd 110/110 G-Mot Nr. 7983745 dengan penguatan kompon yang terdapat di Laboratorium Konversi Energi Listrik FT-USU dengan spesifikasi sebagai berikut: V = 220 V P = 1,2 kW IL = 7,1 A Ish = 0.177 A n = 1400 rpm Jumlah Kutub = 2 Kelas Isolasi = B
Tahanan Medan Shunt (J-K) = 1,25 k Tahanan Medan Seri (E-F) = 0,6 Tahanan Jangkar (GA-HB) = 3,8
Dari pengujian yang dilakukan pada kondisi tanpa beban, diperoleh data-data pada Tabel 1 dan Tabel 2 berikut ini:
Tabel 1. Data hasil pengujian perubahan posisi sikat motor DC penguatan kompon panjang pada kondisi tanpa beban
Posisi Sikat IL (A) Ia = Is (A) Ish (A) n (rpm) -30° 2,66 2,46 0,20 2000 -20° 2,73 2,53 0,20 1900 -10° 2,81 2,61 0,20 1780 0° 2,87 2,67 0,20 1700 +10° 3,06 2,86 0,20 1650 +20° 3,09 2,89 0,20 1550 +30° 3,32 3,12 0,20 1500
Tabel 2. Data hasil pengujian perubahan posisi sikat motor DC penguatan kompon pendek pada kondisi tanpa beban
Posisi Sikat
IL = Is
(A) Ia (A) Ish (A)
n (rpm) -30° 2,72 2,54 0,18 1950 -20° 2,77 2,59 0,18 1850 -10° 2,84 2,66 0,18 1750 0° 2,92 2,74 0,18 1650 +10° 3,06 2,88 0,18 1600 +20° 3,12 2,94 0,18 1500 +30° 3,36 3,18 0,18 1450
Dari pengujian yang dilakukan pada kondisi berbeban, diperoleh data-data pada Tabel 3 dan Tabel 4 berikut ini:
Tabel 3. Data hasil pengujian perubahan posisi sikat motor DC penguatan kompon panjang pada kondisi berbeban Posisi Sikat IL (A) Ia = Is (A) Ish (A) n (rpm) Eg (V) -30° 5,24 5,04 0,20 1750 210 -20° 5,46 5,26 0,20 1600 215 -10° 5,77 5,57 0,20 1500 226 0° 6,08 5,88 0,20 1430 236 +10° 6,71 6,51 0,20 1350 250 +20° 7,14 6,94 0,20 1300 262 +30° 8,63 8,43 0,20 1280 287 Tabel 4. Data hasil pengujian perubahan posisi sikat motor DC penguatan kompon pendek pada kondisi berbeban Posisi Sikat IL = Is (A) Ia (A) Ish (A) n (rpm) Eg (V) -30° 5,27 5,09 0,18 1700 213 -20° 5,47 5,29 0,18 1550 218 -10° 5,81 5,63 0,18 1500 229 0° 6,16 5,98 0,18 1400 240 +10° 6,80 6,62 0,18 1300 255 +20° 7,16 6,98 0,18 1250 264 +30° 8,64 8,46 0,18 1200 290 Berdasarkan data-data yang diperoleh dari hasil pengujian pada kondisi tanpa beban dan kondisi berbeban, maka dilakukan analisis perhitungan untuk mendapatkan efisiensi dan torsi yang dihasilkan motor DC kompon panjang dan motor DC kompon pendek yang diuji yaitu sebagai berikut:
a. Untuk Motor DC Penguatan Kompon Panjang dengan Posisi Sikat -30°
Pada Kondisi Tanpa Beban
(Pin)o = Vt x IL (5) = 220 x 2,66 (Pin)o = 585,2 Watt (Pcu-total)o = (Ia)2 x Ra + (Is)2 x Rs + (Ish)2 x Rs (6) = (2,46)2 x 3,8 + (2,46)2 x 0,6 + (0,20)2 x 1250 = 22,996 + 3,631 + 50 (Pcu-total)o = 76,627 Watt Pkonstan = (Pin)o – (Pcu-total)o (7) = 585,2 – 76,627 Pkonstan = 508,573 Watt
Pada Kondisi Berbeban Pin = Vt x IL = 220 x 5,24 Pin = 1152,8 Watt Pcu-total = (Ia) 2 x Ra + (Is) 2 x Rs + (Ish) 2 x Rsh = (5,04)2 x 3,8 + (5,04)2 x 0,6 + (0,20)2 x 1250 = 96,526 + 15,241 + 50 Pcu-total = 161,767 Watt
Pout = Pin – Pcu-total – Pkonstan (8)
= 1152,8 – 161,767 – 508,573 Pout = 482,46 Watt η = x 100% P P in out (9) = x 100% 1152,8 482,46 η = 41,851 % Ea = Vt – Ia x (Rs + Ra) = 220 – 5,04 x (0,6+ 3,8) = 220 – 22,176 Ea = 197,824 Volt Ta = 9,55 x n I Ea a (10) = 9,55 x 1750 04 , 5 824 , 197 Ta = 5,441 N-m Ta – Tsh = 9,55 x n Gesek Rugi Besi Rugi (11) 5,441 – Tsh = 9,55 x 1750 573 , 508 5,441 – Tsh = 2,775 Tsh = 2,666 Newton-meter
b. Untuk Motor DC Penguatan Kompon Pendek dengan Posisi Sikat -30°
Pada Kondisi Tanpa Beban (Pin)o = Vt x IL
= 220 x 2,72 (Pin)o = 598,4 Watt
(Pcu-total)o = (Ia)2 x Ra + (Is)2 x Rs + (Ish)2 x Rs = (2,54)2 x 3,8 + (2,72)2 x 0,6 + (0,18)2 x 1250 = 24,516 + 4,439 + 40,5 (Pcu-total)o = 69,455 Watt Pkonstan = (Pin)o – (Pcu-total)o = 598,4 – 69,455 Pkonstan = 528,945 Watt
Pada Kondisi Berbeban Pin = Vt x IL = 220 x 5,27 Pin = 1159,4 Watt Pcu-total = (Ia)2 x Ra + (Is)2 x Rs + (Ish)2 x Rsh = (5,09)2 x 3,8 + (5,27)2 x 0,6 + (0,18)2 x 1250 = 98,451 + 16,668 + 40,5 Pcu-total = 155,619 Watt
Pout = Pin – Pcu-total – Pkonstan
= 1159,4 – 155,619 – 528,945 Pout = 474,836 Watt η = x 100% P P in out = x 100% 1159,4 474,836 η = 40,955 % Ea = Vt – Is x Rs – Ia x Ra = 220 – 5,27 x 0,6 – 5,09 x 3,8 = 220 – 3,162 – 19,342 Ea = 197,496 Volt Ta = 9,55 x n I Ea a = 9,55 x 1700 09 , 5 496 , 197 Ta = 5,647 N-m Ta – Tsh = 9,55 x n Gesek Rugi Besi Rugi 5,647 – Tsh = 9,55 x 1700 945 , 528 5,647 – Tsh = 2,971 Tsh = 2,676 Newton-meter
Dengan melakukan cara perhitungan yang sama untuk posisi sudut sikat -20°, -10°, 0°, +10°, +20°, dan +30°, maka diperoleh efisiensi
dan torsi yang dihasilkan motor DC kompon panjang dan motor DC kompon pendek yang diuji seperti pada Tabel 5 dan Tabel 6 berikut: Tabel 5. Perbandingan hasil analisis data pengaruh posisi sikat terhadap efisiensi
Posisi Sikat Efisiensi (%) Motor DC Kompon Panjang Motor DC Kompon Pendek -30° 41,851 40,955 -20° 42,210 41,533 -10° 42,907 42,593 0° 43,768 43,375 +10° 44,799 44,496 +20° 45,699 45,175 +30° 47,316 46,843
Tabel 6. Perbandingan hasil analisis data pengaruh posisi sikat terhadap torsi
Posisi Sikat Torsi (N-m) Motor DC Kompon Panjang Motor DC Kompon Pendek -30° 2,666 2,676 -20° 3,062 3,088 -10° 3,393 3,476 0° 3,950 4,020 +10° 4,720 4,902 +20° 5,317 5,449 +30° 6,747 7,099
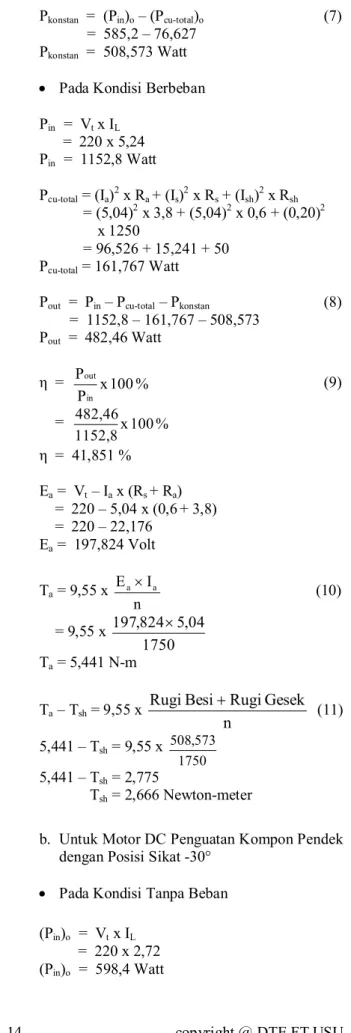
Perbandingan grafik hasil pengujian pengaruh posisi sikat terhadap efisiensi motor DC kompon panjang dengan motor DC kompon pendek ditunjukkan oleh Gambar 5 berikut:
Gambar 5. Grafik perbandingan posisi sikat vs efisiensi motor DC kompon panjang dengan motor DC kompon pendek
40 41 42 43 44 45 46 47 48 -30 -20 -10 0 10 20 30 Ef isi en si (% )
Posisi Sikat (Derajat)
Posisi Sikat vs Efisiensi
Kompon Panjang Kompon Pendek
Dari Gambar 5 dapat dilihat bahwa semakin positif sudut pergeseran sikat, maka semakin besar pula efisiensi yang dihasilkan oleh kedua jenis motor DC yang diuji. Dari Gambar 5 juga dapat dilihat bahwa efisiensi yang dihasilkan motor DC kompon panjang lebih besar daripada efisiensi yang dihasilkan motor DC kompon pendek.
Perbandingan grafik pengujian pengaruh posisi sikat terhadap torsi motor DC kompon panjang dengan motor DC kompon pendek ditunjukkan oleh Gambar 6 berikut:
Gambar 6. Grafik perbandingan posisi sikat vs torsi motor DC kompon panjang dengan motor DC kompon pendek
Dari Gambar 6 dapat dilihat bahwa semakin positif sudut pergeseran sikat, maka semakin besar pula torsi yang dihasilkan oleh kedua jenis motor DC yang diuji. Dari Gambar 6 juga dapat dilihat bahwa torsi yang dihasilkan motor DC kompon pendek lebih besar daripada torsi yang dihasilkan motor DC kompon panjang.
6. Kesimpulan
Dari pembahasan yang dilakukan, maka diperoleh kesimpulan sebagai berikut:
1. Efisiensi dan torsi pada motor DC kompon panjang dan motor DC kompon pendek akan meningkat seiring dengan bergesernya posisi sikat ke arah kanan dari posisi tengah (posisi 0°).
2. Pada masing-masing jenis motor DC yang diuji, efisiensi dan torsi tertinggi diperoleh pada posisi sikat +30° yaitu sebesar 47,316 % dan 6,747 N-m pada motor DC kompon panjang, sedangkan pada motor DC kompon pendek sebesar 46,843 % dan 7,099 N-m. 3. Pada posisi sikat dan beban yang sama,
efisiensi yang dihasilkan motor DC kompon
panjang lebih besar dibandingkan efisiensi yang dihasilkan motor DC kompon pendek. Sedangkan torsi yang dihasilkan motor DC kompon panjang lebih kecil dibandingkan torsi yang dihasilkan motor DC kompon pendek.
7. Ucapan Terima Kasih
Penulis mengucapkan terima kasih kepada Ayahanda (Ardi Kesuma) dan Ibunda (Zahara) selaku orang tua penulis, Ir. A. Rachman Hasibuan, MT selaku dosen pembimbing, juga Ir. Syamsul Amien, M.Si, Ir. Raja Harahap, MT dan Ir. Eddy Warman selaku dosen penguji penulis yang sudah membantu penulis dalam menyelesaikan tulisan ini, serta teman-teman penulis yang sudah memberikan dukungan selama pembuatan tulisan ini.
8. Referensi
[1]. Purba, Richard N. 2010. Analisa Perbandingan Pengaruh Tahanan Pengereman Dinamis Terhadap Waktu Antara Motor Arus Searah Penguatan Kompon Panjang Dengan Penguatan Kompon Pendek. Medan: Departemen
Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
[2]. Theraja, B.L. 1989. A Text Book of
Electrical Technology. New Delhi: Nurja
Construction & Development.
[3]. Rijono,Yon. 1997. Dasar Teknik Tenaga
Listrik. Yogyakarta: Andi.
[4]. Fitzgerald, A.E., Charles Kingsley, Jr., dan Stephen D. Umans. 1990. Mesin-Mesin
Listrik. Edisi Keempat. Trans. Djoko
Achyanto. Jakarta: Erlangga.
[5]. Ananda, Stephanus Antonius dan Edhi Tanaka Soewangsa. 2003. Studi Karakteristik Motor DC Penguat Luar Terhadap Posisi Sikat. Jurnal Teknik
Elektro Vol. 3 No. 2 Hal 51-56. Surabaya: Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Kristen Petra.
[6]. Fabanyo, A. Muid. 2008. Analisa Perbandingan Efisiensi Motor DC Dengan Penguat Luar Terhadap Posisi Sikat. Jurnal
Dinamis Vol. 2 No. 12 Hal 1-10. Jayapura: Fakultas Teknologi Industri dan Kebumian, Universitas Sains dan Teknologi Jayapura. 2 3 4 5 6 7 8 -30 -20 -10 0 10 20 30 To rsi (N-m )
Posisi Sikat (Derajat)
Grafik Torsi vs Posisi Sikat
Kompon Panjang Kompon Pendek
![Gambar 1. Prinsip perputaran motor DC [1]](https://thumb-ap.123doks.com/thumbv2/123dok/4521270.3277239/2.918.496.830.42.1158/gambar-prinsip-perputaran-motor-dc.webp)