2.1 Reliability (Keandalan)
Keandalan menurut L.C Kapoor dan L. R Lamberson didefinisikan sebagai probabilitas suatu item (sistem) untuk memiliki performansi sesuai dengan fungsi yang diharapkan dalam interval waktu dan operasi tertentu. Konsep keandalan juga merupakan probabilitas komponen dari sistem untuk menunjukkan fungsi yang diinginkan dan bebas dari failure dibawah kondisi tertentu, dimana failure merupakan ketidakmampuan peralatan (equipment) untuk melakukan fungsinya (Suwignjo, 2006). Dari definisi tersebut dapat diketahui bahwa keandalan sangat terkait sekali dengan waktu pemakaian item (sistem) yang diamati.
Berikut ini merupakan fungsi dari waktu kerusakan :
Dimana :
T merupakan waktu terjadinya kerusakan
f(t)∆(t) adalah probabilitas sebuah item rusak dalam interval (t, t+∆)
Sebelumnya telah disebutkan bahwa Reliability (R) didefinisikan sebagai probabilitas suatu sistem dapat beroperasi tanpa mengalami kerusakan selama rentang waktu t, sehingga untuk fungsinya adalah sebagai berikut :
( ) { } ( )tdt f t T P t F t
∫
= < = 0 ( ) { } ( ) ( ) ( )tdt f dt t f t F t T P t R t t∫
∫
∞ = − = − = > = 0 1 1Dimana nilai fungsi keandalan berkisar antara 0≤R(t)≤1
Sedang untuk fungsi kegagalan (Failure Rate) atau Hazard Rate adalah sebagai berikut :
Dimana :
λ(t) adalah failure rate atau hazard rate
f(t) adalah probabilitas PDF untuk umur suatu unit alat F(t) adalah probabilitas CDF untuk umur suatu unit alat
f(t)∆(t) adalah probabilitas suatu alat mengalami kerusakan dalam interval (t,t+∆t)
µ adalah mean time to failure (MTTF)
Dalam memprediksi atau menghitung Reliability, harus dapat membedakan apa yang disebut dengan Repairable dan Non-Repairable Items adalah sebagai berikut (Lewis, 1987) :
• Untuk Non-repairable item, keandalan merupakan probabilitas suatu item untuk dapat bertahan selama umur ekspektasinya, bila kerusakan terjadi hanya satu kali. Non-repairable item bisa saja merupakan komponen individu ataupun sebuah sistem yang terdiri atas bermacam komponen. Sehingga bila salah satu komponen mengalami kegagalan pada sistem Non-repairable ini maka sistem juga akan gagal dan keandalan sistem adalah fungsi waktu dari kegagalan komponen yang pertama kali.
• Untuk Repairable item, keandalan merupakan probabilitas kerusakan komponen tidak akan terjadi dalam periode yang dikehendaki, bila kerusakan dapat terjadi lebih dari satu kali. Sebuah komponen dapat berfungsi baik sebagai Non-repairable item maupun Repairable item, sebagai contoh sebuah misil dapat merupakan Repairable item ketika dia berada dalam gudang dan masih sebagai subjek untuk tes peluncuran, namun akan berubah menjadi Non-repairable item ketika dia mulai diluncurkan.
( )
( )
( )
( )
( )
t R t f t F t f t = − = 1 λDalam pengujian suatu konfigurasi mesin (equipment) terdapat dua hal yang harus menjadi pertimbangan yakni sebagai berikut (Jardine, 1973) :
1. Ketergantungan suatu mesin (equipment) dalam grupnya (sistem)
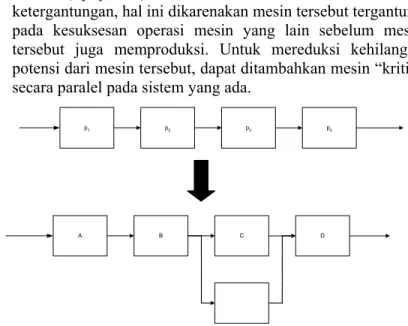
Mesin (equipment) dalam suatu sistem memiliki sikap ketergantungan, hal ini dikarenakan mesin tersebut tergantung pada kesuksesan operasi mesin yang lain sebelum mesin tersebut juga memproduksi. Untuk mereduksi kehilangan potensi dari mesin tersebut, dapat ditambahkan mesin “kritis” secara paralel pada sistem yang ada.
Gambar 2.1 Hubungan antar equipment dalam suatu sistem 2. Struktur fisik dari mesin (equipment) tunggal
Peralatan (equipment) tunggal secara umum dapat berubah sendiri menjadi beberapa subsistem yang dapat memiliki sikap ketergantungan seri maupun paralel. Alternatif konfigurasi peralatan (equipment) dapat memeberikan hasil yang berbeda pada biaya, rreliability (keandalan), ruang yang dibutuhkan, level keamanan, dan lain-lain.
Terdapat hubungan antar peralatan (equipment) dalan keandalan sistem yakni (Jardine, 1973) :
A B C D
• Sistem seri, dimana sistem akan rusak jika salah satu elemen penyusun sistem tersebut rusak. Pada hubungan ini setiap elemen dari sistem mempunyai reliability Ri dan sistem mempunyai n elemen sistem, maka reliability dari keseluruhan sistem (Rs) adalah sebagai berikut :
Gambar 2.2 Sistem yang dihubungkan secara seri
=
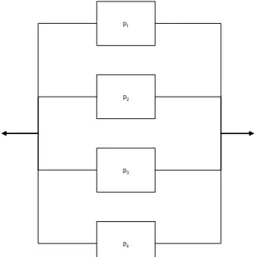
• Sistem Paralel, dimana sistem akan rusak apabila seluruh elemen penyusun sistem tersebut rusak. Sehingga dapat dituliskan probabilitas sistem rusak adalah sebagai berikut :
Gambar 2.3 Sistem yang dihubungkan secara paralel
A B C D p1 p2 p3 p4 n
p
p
p
p
Rs
=
1×
2×
3×
....
×
∏
= n ipi
1Rs = 1 – Probabilitas bahwa sistem berada dalam keadaan gagal = 1– (1 – p1) (1 – p2) …… (1 – pn) = 1 –
∏
= n i iq
1Dimana : qi = 1 – pi merupakan probabilitas kegagalan dari
komponen ke-i
• Kombinasi dari sistem seri dan sistem paralel
Keandalan sistem disini adalah probabilitas bahwa setidaknya salah satu komponen dapat berfungsi jika dibutuhkan pada masing-masing tahap. Rs =
∏
=
−
k i ni iq
11
dimana komponen pada masing-masing tahap adalah identik Untuk bagaimana penggambaran dari rangkaian sistem yang terjadi akan dijelaskan pada bagian selanjutnya.
2.2. Reliability Block Diagram (RBD)
Diagram Blok Sistem atau Keandalan menunjukkan semua peralatan yang terdapat didalam proses dan bagaimana keterkaitan diantaranya. Dalam kasus keterkaitan ini hanya menunjukkan pengaruh dari masing-masing peralatan (equipment) pada output akhir dari sistem ketika gagal. Sehingga tujuan dari pembuatan RBD ini adalah menunjukkan wawasan mengenai aset fisik dimana termasuk didalamnya performansi dan bagaimana mereka saling tergantung dan berhubungan. Dengan kata lain, RBD merupakan representasi skematis suatu sistem dimana koneksi merupakan simbol saling ketergantungan dan fungsinya masing-masing dalam sistem (Cochran, 2001)
Ada dua macam cara untuk menggambarkan macam-macam peralatan (equipment) ini saling berhubungan. Mereka dapat digambarkan dalam rangkaian seri atau rangkaian paralel.
A
C
D B
A B C D
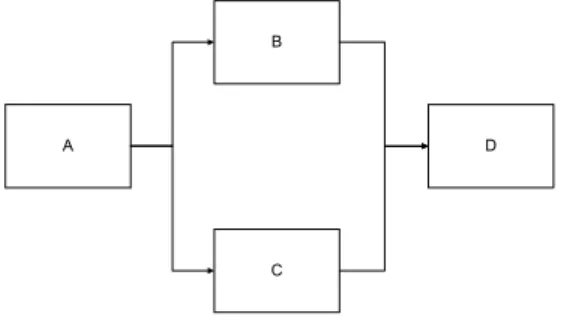
Jika peralatan (equipment) digambarkan dalam rangkaian paralel maka mereka bisa tidak menghentikan rantai rangkaian proses mereka namun mengurangi kapasitas pada rantai rangkaian proses yang diikuti. Hal ini dikarenakan node peralatan (equipment) yang disusun secara paralel tersebut yang mengalami kerusakan akan mengalami kemacetan pada kapasitas yang ditentukan. Hal tersebut dapat dilihat seperti pada gambar 2.4 :
Gambar 2.4 RBD dengan 4 komponen sistem (paralel) , dengan satu item redundant
Jika B dan C sama pentingnya untuk proses pada aktivitas selanjutnya dan menunjukkan fungsi yang sama, proses yang terjadi akan mengalami kegagalan ketika kedua proses B dan C gagal, proses akan berjalan dengan setengah dari kapasitas yang ada ketika B atau C gagal dan proses akan berjalan dengan kapasitas penuh jika kedua B dan C tidak mengalami kegagalan.
Jika peralatan (equipment) tersusun secara seri maka kegagalan pada setiap node yang ada akan menimbulkan kegagalan pada rantai rangkaian proses keseluruhan. Rangkaian yang terjadi dapat dilihat seperti pada gambar :
Jika salah satu blok pada rantai rangkaian mengalami kegagalan, maka tidak akan ada output yang akan melewati pada sisa rangkaian.
Jika seseorang membaca sebuah RBD yang mempunyai banyak aliran proses sehingga dapat menyebabkan kebingungan. RBD sebenarnya tidak menggambarkan fungsi nyata sari setiap peralatan (equipment) dalam perhitungan, hanya saja pengaruh dari kegagalan dari setiap peralatan (equipment) akan mempengaruhi sisa proses yang ada.
Keuntungan dari pemakaian RBD sebelum membangun sebuah model simulasi adalah arsitektur dari RBD dapat secara langsung ditiru kedalam model simulasi. Model simulasi juga memiliki beberapa layer dan divisi diantara section dan juga eksperimentasi dapat dilakukan pada level yang lebih tinggi atau pada bagian-bagian yang pabrik. Perbedaaan antara RBD dengan model simulasi adalah RBD hanya merupakan struktur gambar sedangkan dalam model simulasi terkandung : blok yang bisa berfungsi maupun gagal.
2.3. Model probabilitas untuk keandalan
Langkah pertama dalam menghitung keandalan suatu peralatan atau komponen yaitu dengan mengetahui model probabilitas peralatan atau komponen, dimana biasanya dinyatakan dalam distribusi statistik. Dalam analisa keandalan ada beberapa distribusi yang umum digunakan yaitu distribusi Eksponensial, distribusi Weibull, distribusi Lognormal, dan distribusi Normal.
2.3.1 Distribusi Weibull
Salah satu fungsi distribusi yang sering digunakan untuk menguraikan kerusakan yang disebabkan oleh adanya fatigue dari peralatan adalah distribusi Weibull tiga parameter.
Fungsi padat dari distribusi Weibull dengan 3 parameter adalah sebagai berikut:
− − − = − β β η γ η γ η β t t t f( ) exp 1
Fungsi keandalan dari distribusi Weibull adalah :
− − = β
η
γ
t t R( ) exp Fungsi kumulatif dari distribusi Weibull adalah:
− − − − = α
β
to to t e t F( ) 1 Rataan distribusi Weibull:
(
)
(
1
1)
αβ
µ
=
to
+
−
to
Γ
+
Standard deviasi: ( )[ (1 2) 2(1 1)]12 α αβ
σ
t = −to Γ + −Γ + Median: t median =to
+
(
β
−
to
)
ln
2
)
1λto atau
γ
= parameter lokasi/failure freetime/minimum life
α
= parameter bentukβ
atauη
= parameter skalanilai to disebut nilai jaminan untuk t karena nilai ini
membatasi nilai disribusi Weibull pada to.
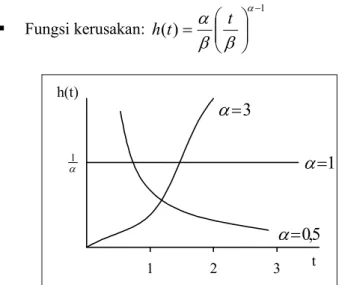
Fungsi kerusakan: 1 ) ( − = α
β
β
α
t t h h(t) t 1 =α
3 =α
5 , 0 =α
1 2 3 α1Gambar 2.6 Laju kerusakan distribusi Weibull
Distribusi Weibull memiliki beberapa kelebihan yang dapat dilihat dari parameter bentuknya
(
β
)
, yaitu:• Jika
α
= 1, didapatkan fungsi keandalan eksponensial dengan laju kerusakan tetap.• Jika
α
< 1, didapatkan fungsi keandalan dengan laju kerusakan menurun.• Jika
α
> 1, didapatkan fungsi keandalan dengan laju kerusakan meningkat.Jika 3,3<
α
<3,5 didapatkan fungsi keandalan yang mendekati distribusi Normal.2.3.2 Distribusi Normal
Distribusi Normal terutama sekali berguna untuk menggambarkan pengaruh pertambahan waktu ketika kita dapat menspesifikasikan waktu antar kerusakan berhubungan dengan ketidakpastian.
Distribusi Normal mempunyai PDF sebagai berikut :
f(t) =
−
2 2)
(
2
1
xp
e
2
1
σ
µ
πσ
t
Keandalan dari distribusi normal didapatkan sebagai berikut : R(t) = 1 - φ
σ
µ
-t
MTBF = µ Untuk CDF F(t) =∫
∞ − t dt 2 ) --(t 2 2e
2
1
σ µπσ
Atau dengan bantuan tabel normal standard dapat dinyatakan dengan : F(t) = φ
σ
µ
-t
Karena laju kerusakan adalah hasil dari f(t) dibagi R(t), maka :
λ (t) = -1 2 2 -t -t 2 ) -(t -e 2 1 t σ µ φ σ µ
πσ
2.3.3 Distribusi Lognormal
Distribusi Lognormal adalah distribusi yang berguna untuk menggambarkan distribusi kerusakan untuk situasi yang bervariasi.
Fungsi kepadatannya adalah : f(t) = 2 2 ln 2s 1 -exp 2 ) -(t 1 med t t
πσ
θ
untuk t > θ > 0 Dimana : s = shape parametertmed = parameter lokasi (waktu median terjadinya
kerusakan)
Fungsi keandalannya adalah : R(t) =
−
medt
t
ln
s
1
-1
φ
Untuk t > 0 MTBF = 2 exp 2 s tmedDan laju kerusakannya adalah :
λ(t) = [ ] [ ] dt e ) -t ( 1 e ) -t ( 1 2 2 2 2 2 ) -(t ln -2 ) -(t ln - ∞
∫
σ µ θ σ µ θθ
θ
t( )
{
a axx
f
=
exp− 0)
(
2.3.4 Distribusi EksponensialDistribusi eksponensial menggambarkan situasi dimana rata-rata kerusakannya adalah konstan. Dari proses Poisson yang men-generate rata-rata kerusakan konstan dimana p.d.f-nya adalah sebagai berikut :
Karena rata-rata kerusakan merupakan fungsi dari waktu, maka kita akan memasukkan variablel independen t menggantikan x. Dan rata-rata kerusakan yang konstan dinotasikan dengan
λ
. Sehingga rata-rata waktu antar kerusakannya (MTTF) adalahλ
1 , fungsi p.d.f-nya dapat dituliskan sebagai berikut :
Probabilitas tidak adanya kerusakan yang terjadi sebelum waktu t dapat diperoleh dengan mengintegrasikan persamaan diatas dan waktu antara 0 dan t, fungsi Reliability-nya adalah seperti dibawah ini :
2.4. Sistem
Beberapa definisi sistem yang telah banyak diberikan oleh ahli-ahli yang terdapat dalam buku karangan Simatupang (1995) antara lain, Geoffrey Gordon (1987) mendefinisikan sistem sebagai suatu agregasi atau kumpulan obyek-obyek yang terangkai dalam interaksi dan saling ketergantungan yang teratur. Sedangkan Schmidt dan Taylor (1970) memberikan definisi yang lebih luas lagi. Mereka menyatakan bahwa sistem adalah suatu kumpulan komponen-komponen (entiti-entiti) yang berinteraksi dan bereaksi antar atribut komponen-komponen atau entiti-entitinya untuk mencapai suatu akhir yang logis. Hick mendefinisikan sistem sebagai sekumpulan komponen yang saling berinteraksi dan beroperasi di dalam suatu batasan.
) exp( ) (t t f =
λ
−λ
∫
= − − = t t dt t f t R 0 ) exp( ) ( 1 ) (λ
Dalam sistem sendiri terdapat beberapa komponen yang perlu untuk dijelaskan, yakni :
1. Entity adalah objek amatan dalam sistem. Entity bergerak, berubah status, mempengaruhi atau dipengaruhi entity yang lain, serta mempengaruhi ukuran performansi output.
2. Attribute adalah properti atau karakteristik dari entity yang nilainya melekat pada entity secara spesifik.
3. Activity adalah operasi dan prosedur yang diawali oleh tiap event.
4. State Variable kumpulan variabel yang menggambarkan sistem pada setiap waktu dan tidak melekat secara spesifik pada entity.
5. Event adalah peristiwa seketika yang mengubah state dari sistem.
Sebagai contoh kasus, dalam sistem produksi yang merupakan entity adalah mesin, attribute-nya kapasitas mesin dan breakdown rate, activity-nya welding, event-nya breakdown dan state variable-nya adalah status mesin (busy, idle, atau down).
Tujuan dari banyak studi mengenai sistem adalah untuk memprediksikan bagaimana sistem tersebut akan bekerja sebelum sistem tersebut dibangun. Suatu alternatif kadang-kadang digunakan untuk membangun sejumlah prototype dan melakukan test, tetapi hal tersebut sangat mahal dan menghabiskan waktu. 2.5 Model
Dalam pembuatan simulasi ini diperlukan sebuah model sehingga proses simulasi atas kondisi nyata yang terjadi dilapangan maupun eksperimen yang diinginkan untuk mencari solusi lewat simulasi dilakukan pada model tersebut. Terrdapat beberapa definisi tentang model yakni sebagai berikut :
• Model sistem didefinisikan sebagai bagan informasi mengenai sebuah sistem yang dikumpulkan dengan tujuan untuk mempelajari sistem tersebut (Gordon Geoffrey, 1980)
• Model dapat didefinisikan sebagai representasi dari sistem baik secara kualitatif dan kuantitif yang mewakili suatu proses atau kejadian dimana dapat menggambarkan secara jelas hubungan interaksi antara berbagai faktor penting yang akan diamati (Wilson, 1984). Model yang ada dikembangkan untuk melakukan investigasi pengembangan yang mungkin pada sistem yang nyata atau dapat juga untuk mengetahui pengaruh kebijaksanaan yang berbeda.
Merujuk pada bagian sebelumnya dimana sangat tidak memungkinkan untuk bereksperimen dengan menggunakan sistem yang nyata, sehingga studi tentang sistem ini biasanya dilakukan dengan menggunakan model. Model tidak hanya berfungsi sebagai pengganti dari sistem tetapi juga penyederhanaan terhadap sistem tersebut (Gordon Geoffrey, 1980)
Beberapa tujuan dari permodelan sistem antara lain : o Memperkecil biaya dan tenaga yang harus dikeluarkan. o Mempersingkat waktu percobaan.
o Memperkecil resiko.
o Model dari sistem dapat berguna dalam menjelaskan, memahami dan memperbaiki sistem tersebut.
o Dapat mengetahui performansi dan informasi yang ditunjukkan oleh sistem
Beberapa karakteristik model yang baik adalah sebagai berikut :
o Meliputi semua elemen yang langsung menunjang pemecahan masalah
o Valid, yaitu merepresentasikan sistem secara tepat o Mudah dimodifikasi dan diperluas
o Cepat dan tidak mahal dibuat o Dapat dipergunakan kembali o Mudah dimengerti
2.6 Antrian
Suatu proses antrian (queueing process) adalah suatu proses yang berhubungan dengan kedatangan seorang pelanggan pada suatu fasilitas pelayanan, kemudian benda yang akan diproses akan menunggu dalam suatu baris (antrian) apabila fasilitas layanan sedang sibuk.
Sistem antrian merupakan himpunan pelanggan, pelayanan, dan suatu aturan yang mengatur kedatangan pelanggan proses pelayanannya.
Elemen yang terdapat pada antrian adalah sebagai berikut : 1. Entity : yaitu material yang menunggu untuk diproses. 2. Server : yaitu penyedia pelayanan yang memproses entity. 3. Antrian : yaitu kumpulan entity yang menunggu untuk
diproses.
Karakteristik daripada antrian adalah sebagai berikut : 1. Pola kedatangan entity/pelanggan
2. Pola pelayanan 3. Jumlah server
4. Kapasitas fasilitas dalam memproses entity 5. Disiplin antrian
2.7 Simulasi
Simulasi merupakan salah satu cara untuk mempelajari sistem sehingga dapat dikatakan simulasi merupakan salah satu sistem pendukung keputusan yang menawarkan pada pengambil keputusan suatu kemampuan yang mampu mencari solusi terhadap permasalahan yang ada dengan model yang terkomputerisasi (Reggy, 2001). Tujuan dilakukannya simulasi adalah untuk mendapatkan gambaran yang jelas tentang suatu sistem yang nyata sehingga dapat dipahami karakteristiknya dan pada akhirnya dapat dilakukan suatu perbaikan jika memang diperlukan.
Menurut Reggy, 2001, simulasi dapat didefinisikan sebagai berikut :
1. Proses desain suatu model matematis-logis dari sebuah sistem nyata dan melakukan percobaan pada model ini dengan sebuah komputer
2. Proses merencanakan suatu model dari sebuah sistem nyata dan melakukan eksperimen dengan model tersebut dengan tujuan memahami tingkah laku sistem.
Menurut Kelton, et al 2005 simulasi dapat diklasifikasikan dalam tiga dimensi yakni :
o Statis vs Dinamis: Kedua jenis model merupakan jenis model yang mewakili situasi yang berhubungan terhadap waktu. Model statis menjelaskan sebuah hubungan yang tidak berubah terhadap waktu. Sedangkan model dinamis berhubungan dengan interaksi yang berubah terhadap waktu. o Kontinyu vs Diskrit: Dalam model kontinyu, state variable
dapat berubah setiap waktu sedangkan pada diskrit simulasi perubahan terjadi secara acak dan tersebar pada suatu titik dari waktu
o Deterministik vs Stokastik: Model yang tidak memilki data random adalah deterministik sedangkan unutk model stokastik setidaknya beberapa inputnya memiliki sifat random.
2.8 Computer Simulation
Salah satu cara untuk melakukan simulasi dengan lebih baik adalah dengan menggunakan komputer atau dikenal dengan Computer Simulation. Computer Simulation merupakan metode untuk mempelajari model yang bervariasi dari sistem nyata dengan evaluasi numerik yang dilakukan oleh software yang didesain untuk meniru karakteristik operasi dari sistem (Kelton, David, R. Sadowski, D. Sadowski. 2000).
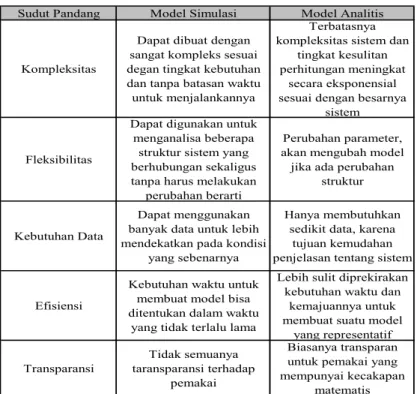
Model simulasi komputer adalah suatu model dimana pada model ini dibuat sedemikian rupa sehingga dapat menggambarkan sistem sesungguhnya dan dapat dilakukan proses eksperimen dengan model ini pada komputer (Pritsher, 1986). Pembangunan model simulasi harus mencakup beberapa elemen sistem, dimana elemen-elemen tersebut saling mempengaruhi elemen lainnya. Alasan utama penggunaan simulasi adalah karena terbatasnya teknik-teknik matematika standard untuk menganalisa suatu model (Tim Peneliti FTI, 1995). Hal ini terjadi apabila interaksi antara variabel sistem tidak linier atau apabila faktor acak merupakan karakteristik dari sistem. Model simulasi digunakan apabila suatu sistem mempunyai kompleksitas atau tingkat kesulitan yang tinggi dan sulit diselesaikan dengan model matematika. Penjelasan lebih lanjut mengenai perbandingan antara model simulasi dan model analitis diuraikan pada tabel 2.1 berikut ini:
Tabel 2.1. Perbandingan antara Model Simulasi dan Model Analitis (sumber : Tim Peneliti FTI, Perancangan Model Simulasi
Komputer Sebagai Alat Bantu Analisis Perencanaan Kebutuhan Fasilitas dan Terminal Peti Kemas, 1995)
Sudut Pandang Model Simulasi Model Analitis
Kompleksitas
Dapat dibuat dengan sangat kompleks sesuai degan tingkat kebutuhan dan tanpa batasan waktu untuk menjalankannya
Terbatasnya kompleksitas sistem dan
tingkat kesulitan perhitungan meningkat
secara eksponensial sesuai dengan besarnya
sistem
Fleksibilitas
Dapat digunakan untuk menganalisa beberapa
struktur sistem yang berhubungan sekaligus tanpa harus melakukan
perubahan berarti
Perubahan parameter, akan mengubah model jika ada perubahan
struktur
Kebutuhan Data
Dapat menggunakan banyak data untuk lebih mendekatkan pada kondisi
yang sebenarnya
Hanya membutuhkan sedikit data, karena
tujuan kemudahan penjelasan tentang sistem
Efisiensi
Kebutuhan waktu untuk membuat model bisa ditentukan dalam waktu
yang tidak terlalu lama
Lebih sulit diprekirakan kebutuhan waktu dan
kemajuannya untuk membuat suatu model
yang representatif Transparansi Tidak semuanya taransparansi terhadap pemakai Biasanya transparan untuk pemakai yang mempunyai kecakapan
matematis
2.9 Activity Cycle Diagram
Activity Cycle Diagram / ACD adalah salah satu cara yang dipakai untuk memodelkan interaksi dari suatu entity pada sistem dengan struktur antrian yang cukup besar dan dominan. Activity Cycle Diagram dilengkapi dengan gambar gambar yang mampu mendeskripsikan interaksi-interaksi antara entity dan mampu menggambarkan kondisi sistem dari tiap entity, selain itu ACD mampu menunjukan logic / cara kerja dari suatu sistem.
Dalam ACD hanya terdapat 2 macam simbol, yaitu seperti yang ditunjukan oleh gambar 1.
Live / Active State merupakan kondisi dimana entity sedang berada dalam proses atau dilayani oleh server, serta aktifitas entity lainnya yang merupakan kategori event aktif dalam sistem.
Dead State merupakan state dimana entity tidak sedang mengalami proses pelayanan dalam server, serta menggambarkan kondisi antrian – antrian entity dalam sistem dan elemen non entity saat tidak sedang berfungsi melayani entity, atau dalam kondisi set-up, breakdown, serta kondisi failure dan shift.
Gambar 2.7 Simbol live state ACD dan Simbol Dead State ACD 2.10 Verifikasi dan Validasi Model
Salah satu masalah penting dalam penggunaan model simulasi sebagai alat analisis sistem menentukan apakah model merupakan representasi yang akurat dalam memodelkan sistem yang menjadi obyek studi. Proses verifikasi dilakukan untuk menentukan apakah model simulasi berjalan sesuai keinginan pembuat model, misalnya dengan melakukan proses “debug” program komputer. Sedangkan validasi digunakan untuk menentukan apakah model simulasi mampu mewakili sistem riil secara akurat.
2.10.1 Verifikasi Model Simulasi
Pada sub bab ini akan diuraikan teknik-teknik yang digunakan dalam melakukan proses verifikasi program komputer dari model simulasi (Law & Kelton, 1983).
Live / Active State
1. Menulis dan “debug” program komputer untuk tiap modul atau sub-program. Pertama kali lebih baik dibuat suatu model yang sederhana dan kemudian secara bertahap dibuat lebih kompleks sesuai kebutuhan.
2. Pengembangan model simulasi dilakukan dalam 1 tim yang terdiri dari beberapa anggota yang memiliki tugas-tugas tertentu yang berbeda.
3. Melakukan “tracing” sehingga dapat menelusuri state sistem yang disimulasikan secara jelas.
4. Menjalankan model dengan melakukan penyederhanaan asumsi pada karakteristik model yang sudah diketahui.
5. Membuat suatu display grafis yang mampu menampilkan output simulasi pada saat simulasi sedang berjalan.
2.10.2 Validasi Model Simulasi
Validasi merupakan suatu proses perbandingan parameter antara model simulasi dengan sistem yang disimulasikan (Pidd, 1992). Sebuah model dapat diterima sebagai model yang memadai apabila model tersebut berhasil melewati uji validasi. Pendekatan yang biasa digunakan dalam melakukan uji validasi adalah validasi kotak hitam (black box validation) dan validasi kotak putih (white box validation).
Validasi kotak hitam dilakukan dengan melakukan observasi perilaku sistem riil pada suatu kondisi tertentu dan menjalankan model pada kondisi yang sedapat mungkin mendekati kondisi sistem riil. Model dianggap valid jika tidak ada perbedaan yang signifikan antara observasi model dengan sistem riil. Metodologi yang dapat dilakukan untuk melakukan perbandingan tersebut adalah dengan menetapkan suatu hipotesa awal dan selanjutnya melakukan pengujian statistik terhadap nilai rata-rata sistem riil dan hasil observasi model. Selanjutnya dilakukan analisa bahwa kurang dari x% kemungkinan bahwa hipotesa tersebut diterima atau ditolak.
Validasi kotak putih dilakukan dengan mengamati cara kerja inteval model simulasi, misalnya input distribusi dan logika sistem, baik statis maupun dinamis.
2.11 Analisa Output Simulasi
Penelitian yang dilakukan oleh Law & Kelton (1983) menyatakan bahwa sebagian besar studi simulasi yang menghabiskan banyak biaya dan waktu dalam pengembangan model melakukan analisa output simulasi dengan cara yang kurang tepat. Cara yang biasa dilakukan adalah membuat suatu single run experiment dalam panjang simulasi tertentu dan menggunakan nilai performansi simulasi tersebut sehingga jawaban benar dari model. Namun output simulasi tersebut mungkin menyimpang dari jawaban benar karena input simulasi berasal dari nilai variabel random yang mempunyai variansi besar. Untuk itulah, pada sub bab ini akan diuraikan analisa output simulasi dengan teknik-teknik statistik.
Berdasarkan analisa outputnya, simulasi dapat dibedakan menjadi dua, yaitu simulasi tipe terminating dan simulasi steady state. Simulasi terminating adalah simulasi dengan menetapkan ukuran peformansi sistem relatif dengan interval waktu simulasi [0, TE], dimana TE adalah waktu dimana suatu event E terjadi.
Sedangkan simulasi steady state adalah simulasi yang menetapkan suatu batasan ukuran performansi sistem karena panjang simulasi cenderung tidak terbatas. Karena tidak adanya kejadian alami E untuk mengakiri simulasi, maka panjang simulasi dibuat cukup besar untuk mendapatkan estimasi yang lebih baik. Kondisi steady state bukan berarti menyatakan bahwa suatu ukuran performansi menjadi konstan setelah waktu tertentu, tetapi distribusinya cenderung menjadi invariant.