TUGAS MID
MK SISTEM KENDALI CERDAS
LAPORAN SISTEM BERBASIS PID DAN FLC
OLEH :
ABDULLAH KHALIFAH – D41107272
UNIVERSITAS HASANUDDIN
A. PENDAHULUAN
Pada zaman modern ini, masyarkat global tidak dapat terpisah dari teknologi. Kehidupan sehari-hari manusia pun selalu terkait dengan teknologi. Dari bangun pagi hingga tidur malam, selama 24 jam, teknologi selalu ada di dekat kita. Seiring bertambahnya waktu, teknologi terus berkembang untuk meringankan kehidupan manusia.
Sistem berbasis teknologi merupakan system buatan manusia yang bertujuan untuk membuat manusia lebih mudah, nyaman, dan aman. Untuk membangun sebuah system, kita memerlukan alat – alat yang dapat bekerja secara harmonic. Keharmonisan alat-alat merupakan kunci dari keberhasilan sebuah system. Itulah tugas dari Sistem Kendali. Sistem kendali merupakan suatu kumpulan alat yang mengendalikan, memerintah, dan mengatur keadaan dari suatu system.
Setiap system kendali akan menghasilkan respon yang bermacam-macam. Respon tersebut berasal dari pengaruh di luar system dan dalam system. Untuk menghasilkan system dengan respon yang cepat dan akurat, kita memerlukan sebuah komponen control PID (Proportional, Integral, Derivatif Controller). Tetapi, siapa saja yang ingin membuat sebuah system kendali yang lebih akurat dan presisi, maka kita memerlukan sebuah komponen control FLC (Fuzzy Logic Controller). Dengan kombinasi PID dan FLC di dalam sebuah system, diharapkan dapat membuat system tersebut memiliki respon yang cepat, akurat, presisi, dan stabil.
B. DASAR TEORI
a. PID Controller
PID (dari singkatan bahasa Inggris: Proportional–Integral–Derivative controller) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut.
1.Kontrol Proporsional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time.
2.Kontrol Integratif
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat dinyatakan sebagai Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem
3.Kontrol Derivatif
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai
b. Fuzzy Logic Controller
C. MODEL SISTEM PID DAN FLC DI SOFTWARE MATLAB
1. Pengaturan Sistem Pengendali PID
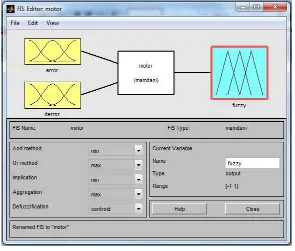
2. Pengaturan Sistem Pengendali FLC
Gambar FLC
Gambar Member Function Fuzzy
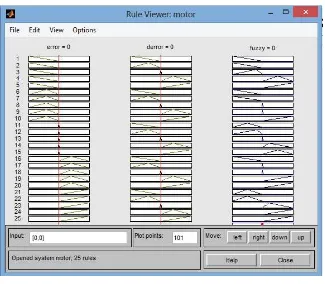
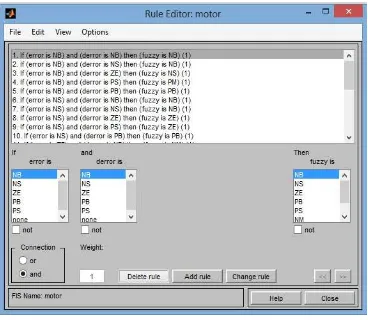
Gambar Rule Editor
D. HASIL DAN PEMBAHASAN
a. Pengendali PID
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0019 0,0022 0,0053 0,0321 0,27
Berdasarkan grafik di atas, overshoot pada pengendali PID cukup besar walaupun waktu respon cukup cepat.
b. Pengendali FLC
Hanya FLC yang terhubung ke LTI Sistem, sedangkan PID dan Gangguan tidak terhubung ke LTI Sistem.
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0068 0,0081 0,0132 Tak
Terdefinisi
0,782
c. PID + FLC
FLC dan PID terhubung ke LTI Sistem, sedangkan Gangguan tidak terhubung ke LTI Sistem.
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0018 0,002 0,0047 Tidak
terdefinisi
0,3133
d. PID + Gangguan
Pengendali PID dan input Gangguan terhubung ke LTI Sistem, sedangkan FLC tidak terhubung ke LTI Sistem.
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0017 0,0019 0,053 Tak
Terdefinisi
0,5119
e. FLC + Gangguan
Pengendali Fuzzy Logic (FLC) dan input STEP gangguan terhubung ke LTI Sistem, sedangkan Pengendali PID tidak terhubung ke LTI Sistem.
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0037 0,0039 0,9821 Tidak
terdefinisi
1666,68
f. FLC + PID + Gangguan
Pengendali Fuzzy Logic (FLC), Pengendali PID, dan Input STEP Gangguan terhubung ke LTI Sistem.
Td (s) Tr (s) Tp (s) Ts (s) Mp (%) Nilai 0,0016 0,0017 0,0047 Tidak
terdefinisi
0,5143
E. KESIMPULAN
Setelah mengamati hasil dari pengamatan pada software MATLABTM, kita dapat mengetahui
bahwa :
- Sistem dengan Pengendali PID sangat dipengaruhi oleh nilai P (Proportional), I (Integral), dan D (Derivative) – Kp, Ki, dan Kd. Nilai P dan I merupakan potongan dari NIM penulis. Sesuai grafik pengendali PID (saja), nilai overshoot cukup besar tetapi waktu respon cukup cepat.
- Sistem dengan Pengendali Fuzzy Logic (FLC) memiliki nilai overshoot yang rendah tetapi memiliki waktu respon yang besar.
- Gangguan merupakan sinyal STEP pada t=0.01 (sama dengan Nilai Input STEP). - Pengendali PID ditambah dengan Sinyal STEP Gangguan akan menghasilkan bentuk
sinyal yang mirip dengan Sistem Pengendali PID (saja), tetapi Nilai Hasil Akhir akan bernilai lebih dari 1. Hal ini disebabkan oleh Gangguan. Pengendali PID tidak secara signifikan terpengaruh oleh input STEP Gangguan.
- Pengendali Fuzzy Logic (FLC) sangat terpengaruh oleh input STEP Gangguan. Nilai Overshootnya sangat besar.