Pengolahan Citra di Ranah Frekuensi
Iwan Setyawan
Dept. Electronic Engineering, Satya Wacana Christian University
Pendahuluan
• Sama seperti pada ranah spatial, pengolahan citra pada ranah
frekuensi juga dapat digunakan untuk tujuan enhancement atau restorasi.
• Pada bagian ini akan dibahas bagaimana merepresentasikan
serta mengolah citra dalam ranah frekuensi.
• Alat utama yang akan digunakan pada bagian ini adalah
transformasi Fourier.
• Pembahasan transformasi Fourier pada bagian ini dibatasi pada
Transformasi Fourier: Intro
• Secara umum, transformasi Fourier digunakan untuk
menguraikan (decompose) sebuah sinyal menjadi komponen-komponen berupa gelombang sinusoida.
• Dalam konteks PCD, output transformasi Fourier adalah
representasi citra dalam ranah frekuensi.
• Dalam ranah frekuensi (ranah Fourier), setiap titik
Transformasi Fourier: Why?
• Transformasi Fourier memungkinkan dilakukannya beberapa hal
yang tidak dapat dilakukan pada ranah spatial.
• Banyak operasi dapat dilakukan dengan lebih cepat dalam ranah
Fourier dibandingkan dalam ranah spatial.
• Filtering dalam ranah Fourier jauh lebih efisien dibanding filtering
dalam ranah spatial, terutama untuk filter-filter besar.
• Dengan transformasi Fourier, kita dapat memproses
frekuensi-frekuensi spesifik. Dengan demikian, proses low- dan high-pass filtering dapat dilakukan dengan lebih presisi.
Transformasi Fourier: Basic Ideas (1)
• Sebuah fungsi periodik (atau fungsi non-periodik yang luasan
dibawah kurva fungsinya berhingga) dapat direpresentasikan sebagai jumlahan fungsi sinus dan cosinus dengan berbagai amplitudo dan frekuensi.
• Ada fungsi-fungsi yang tersusun oleh jumlah komponen yang
berhingga, ada fungsi-fungsi yang tersusun oleh jumlah komponen yang tidak berhingga.
Transformasi Fourier: Basic Ideas (3)
Transformasi Fourier: Kontinu (1)
• Transformasi Fourier dari sebuah fungsi kontinu 1-D f(x)
didefinisikan sebagai berikut:
F(u) =
∫ ∞
−∞ f(x)e
−j2πuxdx (1)
• Inverse transformasi Fourier didefinisikan sebagai berikut:
f(x) =
∫ ∞
−∞F(u)e
Transformasi Fourier: Kontinu (2)
• Dalam dua dimensi, pasangan persamaan tadi dapat ditulis
sebagai berikut: F(u, v) = ∫ ∞ −∞ ∫ ∞ −∞ f(x, y)e −j2π(ux+vy) dxdy (3) f(x, y) = ∫ ∞ −∞ ∫ ∞ −∞F(u, v)e j2π(ux+vy)dudv (4)
Transformasi Fourier: DFT 1-D (1)
• Discrete Fourier Transform (DFT) sebuah fungsi diskret 1-D, f(x), x =1, 2, . . . , M−1 adalah F(u) = M1 M−1
∑
x=0 f(x)e−j2πux/M untuk u=0, 1, 2, . . . , M−1 (5)• IDFT didefinisikan sebagai berikut:
f(x) = M−1
∑
u=0 F(u)e−j2πux/M −Transformasi Fourier: DFT 1-D (2)
• Faktor M1 kadang-kadang dituliskan bukan pada persamaan
transformasi Fourier tapi pada persamaan inverse-nya.
• Kadang-kadang, kedua persamaan dikalikan dengan faktor √1
M.
• Penghitungan DFT dilakukan sebagai berikut:
1 Set u=0
2 Lakukan summing untuk semua nilai x
3 Jika u<M, set u=u+1 dan kembali ke step 2. Jika u=M, proses
selesai.
• Proses ini membutuhkan kira-kira M2buah penjumlahan &
Transformasi Fourier: DFT 1-D (3)
• Proses penghitungan IDFT mirip dengan prosedur diatas.
• Salah satu sifat paling penting DFT dalam PCD adalah bahwa
semua citra memiliki DFT dan IDFT.
• Sifat diatas dikarenakan pasangan DFT dan IDFT pasti ada asal
f(x)memiliki nilai berhingga. Semua citra digital dapat
Transformasi Fourier: DFT 1-D (4)
• Konsep ranah frekuensi diperoleh dari rumus Euler sebagai
berikut:
ejθ =cosθ+j sinθ (7)
• Dengan mensubstitusikan persamaan ini ke Persamaan (5) (dan
karena cos(−θ) =cosθ), diperoleh
F(u) = M1
M−1
∑
x=0
f(x)[cos 2πux/M−j sin 2πux/M] (8)
• Ranah F(u)disebut dengan ranah frekuensi dan masing-masing
Transformasi Fourier: DFT 1-D (5)
• Karena F(u)adalah bilangan kompleks, maka sering dituliskan:
F(u) =|F(u)|ejϕ(u) (9) dengan magnitude (spektrum) transformasi Fourier didefinisikan sebagai:
|F(u)| = [ℜ2(u) +ℑ2(u)]1/2 (10) dan sudut fase transformasi didefinisikan sebagai:
ϕ(u) =tan−1 [ ℑ(u) ℜ(u) ] (11)
Transformasi Fourier: DFT 1-D (6)
• Besaran lain yang banyak digunakan adalah power spectrum,
yang didefinisikan sebagai berikut:
P(u) =|F(u)|2 (12)
Transformasi Fourier: DFT 2-D (1)
• DFT dari sebuah citra f(x, y)dengan ukuran M×N adalah
F(u, v) = 1 MN M−1
∑
x=0 N−1∑
y=0 f(x, y)e−j2π(ux/M+vy/N) (13)• IDFT 2-D didefinisikan sebagai berikut
f(x, y) = M−1
∑
u=0 N−1∑
v=0 F(u, v)ej2π(ux/M+vy/N) (14)Transformasi Fourier: DFT 2-D (2)
• Definisi magnitude, fase dan power spectrum DFT 2-D adalah
|F(u, v)| = [ℜ2(u, v) +ℑ2(u, v)]1/2 (15) ϕ(u, v) =tan−1 [ ℑ(u, v) ℜ(u, v) ] (16) P(u, v) =|F(u, v)|2 =ℜ2(u, v) +ℑ2(u, v) (17)
Transformasi Fourier: DFT 2-D (3)
• Biasanya, citra yang akan ditransformasikan dikalikan lebih
dahulu dengan(−1)x+y, karena
F[f(x, y)(−1)x+y] =F(u−M/2, v−N/2) (18)
• Persamaan ini menunjukkan bahwa titik awal transformasi
Fourier (yaitu, F(0, 0)) berada pada titik u= M/2 dan v= N/2.
• Agar koordinat hasil shifting ini tetap integer, M dan N harus
Transformasi Fourier: DFT 2-D (4)
• Nilai transformasi Fourier pada titik(u, v) = (0, 0)adalah
F(0, 0) = 1 MN M−1
∑
x=0 N−1∑
y=0 f(x, y) (19)• Dengan kata lain, jika f(x, y)adalah sebuah citra, nilai F(0, 0)
adalah nilai rata-rata nilai gray-level citra. Komponen ini disebut komponen DC.
• Jika f(x, y)real, maka F(u, v)conjugate symmetric, atau
F(u, v) =F∗(−u,−v) (20) Dari sini diperoleh bahwa
Transformasi Fourier: DFT 2-D (5)
Transformasi Fourier: DFT 2-D (6)
Transformasi Fourier: DFT 2-D (7)
Transformasi Fourier: DFT 2-D (9)
Konsep Frekuensi pada Citra Digital (1)
• Konsep “frekuensi” pada citra digital berkaitan dengan banyaknya
perubahan nilai pixel per derajat sudut pandang.
• Konsep “magnitude” pada citra digital berkaitan dengan besarnya
perubahan tersebut.
• Pada citra, besarnya frekuensi bergantung pada banyak hal, salah
satunya pada jarak antara sensor/mata dengan citra tersebut: Suatu daerah yang dianggap “high-frequency” pada jarak jauh bisa menjadi “low-frequency” pada jarak dekat.
Konsep Frekuensi pada Citra Digital (2)
• Daerah low-frequency kadang disebut daerah dengan energi
rendah dan daerah high-frequency disebut daerah dengan energi tinggi (misalnya pada bidang kompresi citra).
• Human Visual System (HVS) memiliki kepekaan yang lebih tinggi
terhadap daerah low-frequency dibandingkan terhadap daerah high-fequency (yaitu, manusia lebih peka terhadap
perubahan/gangguan yang terjadi pada daerah low-frequency dibanding high-frequency).
Filtering dalam ranah frekuensi: Intro (1)
• Pada umumnya, tidak mudah membuat hubungan bagian-bagian
tertentu dari suatu citra dengan hasil transformasinya.
• Meskipun demikian, dapat ditarik beberapa hubungan umum
antara komponen frekuensi dengan karakteristik spatial citra.
• Contohnya, kita dapat menghubungkan frekuensi dalam ranah
Fourier dengan pola perubahan perubahan luminance pada citra:
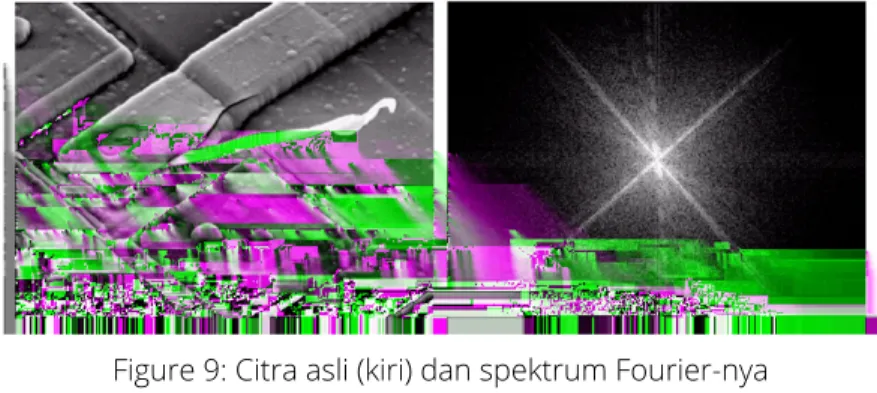
• Titik tengah spektrum menunjukkan nilai rata-rata luminance citra.
• Titik-titik yang jauh dari titik tengah spektrum menunjukkan daerah-daerah dengan perubahan level luminance yang besar, seperti edge, noise, dll.
Filtering dalam ranah frekuensi: Intro (2)
Filtering dalam ranah frekuensi: Basics (1)
Secara umum, proses filtering dalam ranah frekuensi adalah sebagai berikut: 1 Hitung f′(x, y) = f(x, y)(−1)x+y 2 Hitung F(u, v) =F[f′(x, y)] 3 Hitung G(u, v) =F(u, v)H(u, v). 4 Hitung ˆg(x, y) =F−1[G(u, v)] 5 Hitung g′(x, y) =ℜ[ˆg(x, y)] 6 Hitung g(x, y) =g′(x, y)(−1)x+y
Filtering dalam ranah frekuensi: Basics (2)
• Pada langkah ke-3, H(u, v)disebut filter karena berfungsi
menekan frekuensi-frekuensi tertentu dan meloloskan sisanya.
• Perkalian pada langkah ke-3 dilakukan per elemen
(masing-masing elemen F(u, v)dikalikan dengan masing-masing
elemen H(u, v)).
• Pada umumnya F(u, v)adalah besaran kompleks sedangkan
H(u, v)adalah besaran real. Dalam hal ini nilai H(u, v)dikalikan dengan bagian real dan imajiner F(u, v).
• Filter seperti diatas disebut dengan filter zero-phase-shift, karena
Filtering dalam ranah frekuensi: Basics (3)
• Hasil operasi IDFT pada umumnya kompleks. Tetapi dalam kasus
ini jika f(x, y)real, seharusnya ˆg(x, y)juga real (yaitu, semua komponen imajinernya 0).
• Pada prakteknya, ˆg(x, y)biasanya masih memiliki komponen
imajiner yang dihasilkan akibat error komputasi (round-off, dll). Oleh karena itu, perlu dilakukan langkah ke-5.
• Perkalian dengan(−1)x+ydilakukan untuk menghilangkan
Filtering dalam ranah frekuensi: Basics (4)
Filtering dalam ranah frekuensi: Basics (5)
• Misalkan kita hendak mem-filter suatu citra sedemikian sehingga
nilai rata-rata gray-level citra tersebut 0.
• Karena dalam ranah frekuensi F(0, 0)merupakan nilai rata-rata
gray-level citra, dengan membuat F(0, 0) =0 kita dapat membuat
sebuah citra yang nilai rata-rata gray-levelnya 0.
• Filter yang dapat digunakan untuk melakukan hal ini adalah
H(u, v) =
{
0 jika(u, v) = (M/2, N/2)
1 otherwise (22)
Filtering dalam ranah frekuensi: Basics (6)
Filtering dalam ranah frekuensi: Basics (7)
• Filter-filter spatial yang telah dibahas pada bab sebelumnya dapat
dikaitkan langsung dengan filter sejenis pada ranah frekuensi.
• Kaitan utama antara ranah spatial dan frekuensi diberikan oleh
teorema konvolusi.
• Proses konvolusi sudah dijelaskan pada pembahasan filter ranah
Filtering dalam ranah frekuensi: Basics (8)
• Hasil paling penting teorema konvolusi dalam hal ini adalah
hubungan:
h(x, y)⇔ H(u, v) (23)
• Persamaan diatas menyatakan bahwa filter spatial h(x, y)dan
filter ranah frekuensi H(u, v)adalah pasangan transformasi
Fourier.
• Dengan kata lain, jika kita memiliki sebuah filter dalam ranah
frekuensi, kita dapat memperoleh filter ranah spatial dengan cara mencari inverse transformasi Fourier-nya.
Filtering dalam ranah frekuensi: Basics (9)
• Pembuatan filter spatial secara langsung dari H(u, v)tidak efisien
karena masalah ukuran.
• Pada prakteknya hasil inverse transformasi Fourier digunakan
sebagai guideline (“prototipe”) pembuatan filter spatial dengan ukuran yang lebih kecil tapi dengan sifat yang hampir sama.
• Karena transformasi Fourier adalah sebuah proses linear,
Filtering dalam ranah frekuensi: Basics (10)
• Sebagai contoh, misalkan sebuah filter Gaussian (1-D) pada ranah
frekuensi, yaitu
H(u) =Ae−u2/2σ2 (24)
• Inverse transformasi Persamaan (24) (dengan kata lain, filter
spatial yang ekuivalen) adalah sebagai berikut
h(x) =√2πσAe−2π2σ2x2 (25)
Filtering dalam ranah frekuensi: Basics (11)
Filtering dalam ranah frekuensi: Basics (12)
Beberapa hal yang dapat diamati dari Gambar 12 adalah:
• Filter H(u)adalah sebuah low-pass filter.
• Bentuk filter h(x)dapat digunakan sebagai dasar pembuatan
kernel filter spatial yang lebih kecil.
• Kedua filter memiliki koefisien yang semuanya positif. Jadi dalam
ranah spatial kita dapat membuat kernel LPF dengan koefisien yang semuanya positif.
Filtering dalam ranah frekuensi: Basics (13)
• Contoh lain filter pada ranah frekuensi adalah sebuah high-pass
filter sebagai berikut
H(u) =Ae−u2/2σ12−Be−u2/2σ22 (26)
Dalam persamaan ini A ≥B danσ1 >σ2.
• Filter spatial yang ekuivalen dengan filter ini adalah
h(x) =√2πσ1Ae−2π
2σ2
1x2−√2πσ2Be−2π2σ22x2 (27)
Filtering dalam ranah frekuensi: Basics (14)
Filtering dalam ranah frekuensi: Basics (15)
• Pada Gambar 13 dapat diamati bahwa bentuk filter spatial yang
dihasilkan dariF−1[H(u)]mirip dengan filter spatial yang sudah
dibicarakan pada bab yang lalu.
• Dari kedua contoh ini dapat dilihat bahwa pengembangan filter
dapat dilakukan dalam ranah frekuensi karena lebih “intuitif”.
• Setelah filter dalam ranah frekuensi diperoleh, penerapan
filtering dapat dilakukan dalam ranah spatial seperti pada bab sebelumnya.
Smoothing Frequency Domain Filters: Intro
• Seperti sudah dibahas sebelumnya, perubahan gray-level yang
tajam (misalnya pada edge atau noise) memberi kontribusi pada komponen frekuensi tinggi spektrum Fourier suatu citra.
• Jadi efek smoothing atau blurring dapat diperoleh dengan
menekan komponen frekuensi tinggi (dalam range tertentu) transformasi Fourier suatu citra.
• Dalam bagian ini akan dibahas 3 jenis filter smoothing yaitu filter
Smoothing Frequency Domain Filters: ILPF (1)
• LPF paling sederhana adalah filter yang membuang semua
komponen frekuensi tinggi yang jaraknya dari titik pusat
transformasi lebih dari suatu jarak tertentu, D0.
• Filter ini disebut LPF ideal (ILPF) 2-D, yang diberikan oleh
persamaan H(u, v) = { 1 jika D(u, v)≤ D0 0 jika D(u, v) >D0 (28)
• Dengan asumsi bahwa transformasi Fourier “centered”, untuk
sebuah citra berukuran M×N kita peroleh hubungan
Smoothing Frequency Domain Filters: ILPF (2)
Smoothing Frequency Domain Filters: ILPF (3)
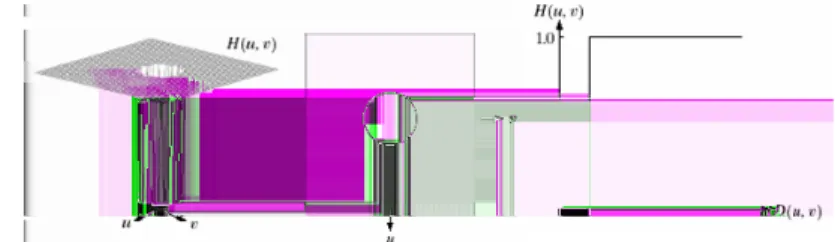
• Filter ini merupakan filter ideal karena semua frekuensi dalam
lingkaran dengan radius D0diloloskan sementara semua
frekuensi diluar lingkaran tersebut dihilangkan.
• Pada sebuah LPF ideal, titik perubahan antara H(u, v) =1 dan
H(u, v) =0 disebut dengan frekuensi cutoff.
• Transisi yang sedemikian tajam tidak dapat direalisasikan dengan
komponen elektronik, tetapi dapat diterapkan menggunakan komputer.
Smoothing Frequency Domain Filters: ILPF (4)
• Semakin kecil radius D0, semakin sedikit frekuensi yang
diloloskan sehingga citra output akan semakin blur.
• Salah satu cara menentukan frekuensi cutoff adalah dengan
menghitung seberapa besar energi citra yang akan dipertahankan.
• Jumlah total energi suatu citra dihitung dengan menjumlahkan
nilai semua komponen power spectrum untuk tiap titik(u, v),
yaitu PT = M−1
∑
u=0 N−1∑
v=0 P(u, v) (30)Smoothing Frequency Domain Filters: ILPF (5)
• Sebuah lingkaran dengan radius r dari titik pusat spektrum
transformasi Fourier akan mengandungα persen energi citra,
atau α=100 [
∑
u∑
v P(u, v)/PT ] (31)• Sebagai contoh, gambar berikut menunjukkan spektrum sebuah
citra berukuran 500×500 pixel.
• Masing-masing lingkaran memiliki radius 5, 15, 30, 80 dan 230.
• Masing-masing lingkaran tersebut mencakup 92%, 94.6%, 96.4%,
Smoothing Frequency Domain Filters: ILPF (6)
Smoothing Frequency Domain Filters: ILPF (7)
Smoothing Frequency Domain Filters: ILPF (8)
Smoothing Frequency Domain Filters: ILPF (9)
Smoothing Frequency Domain Filters: ILPF (10)
• Hasil filtering dengan D0=5 bisa dikatakan tidak banyak
berguna. Dari sini dapat dilihat bahwa informasi detail citra terdapat dalam 8% energi citra yang dihilangkan.
• Citra yang difilter dengan D0=15, 30 dan 80 memiliki ciri khas
berupa “ringing”. Hal ini adalah konsekuensi penggunaan filter ideal. Fenomena ini makin berkurang jika semakin banyak energi citra yang dilalukan.
• Citra yang difilter dengan D0=230 hampir identik dengan citra
asli. Hal ini menunjukkan bahwa 0.5% energi yang dibuang tidak banyak mengandung informasi edge.
Smoothing Frequency Domain Filters: ILPF (11)
Fenomena blurring dan ringing dapat dijelaskan sebagai berikut:
• Dalam ranah frekuensi dan spatial, hubungan antara citra input
dan output masing-masing adalah:
G(u, v) =H(u, v)F(u, v) (32)
g(x, y) =h(x, y)∗f(x, y) (33)
Smoothing Frequency Domain Filters: ILPF (12)
Smoothing Frequency Domain Filters: ILPF (13)
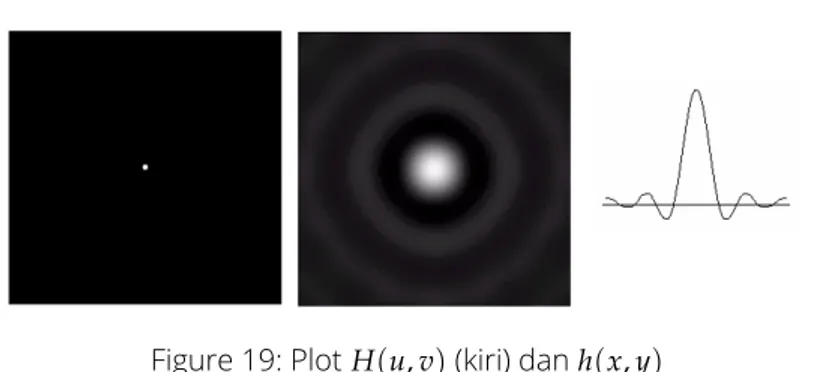
• Dari gambar terlihat bahwa filter h(x, y)memiliki ciri khas berupa
komponen utama pada titik pusat dan lingkaran-lingkaran konsentris disekeliling komponen utama.
• Komponen utama menyebabkan efek blurring, sedangkan
lingkaran-lingkaran konsentris mengakibatkan efek ringing.
• Dapat dilihat pula bahwa filter h(x, y)memiliki komponen negatif,
Smoothing Frequency Domain Filters: ILPF (14)
• Hasil yang lebih ekstrim ditunjukkan pada contoh berikut.
Misalkan citra input, f(x, y)adalah citra yang berisi 5 buah “impulse”.
• Hasil filtering citra ini menunjukkan dengan jelas efek blurring
serta efek ringing yang terjadi.
• Hasil dalam contoh ini dapat digunakan untuk menjelaskan efek
ringing dan blurring pada citra yang lebih kompleks, yaitu dengan menganggap masing-masing pixel sebagai impulse-impulse.
Smoothing Frequency Domain Filters: ILPF (15)
Figure 20: Citra asli (kiri), hasil filtering (tengah), cross-section hasil filtering (kanan)
Smoothing Frequency Domain Filters: BLPF (1)
• Sebuah BLPF orde n dengan frekuensi cutoff pada jarak D0dari
titik asal didefinisikan sebagai berikut:
H(u, v) = 1
1+ [D(u, v)/D0]2n
(34)
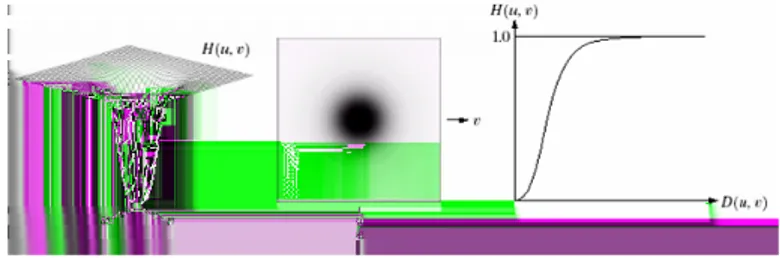
• Berbeda dengan ILPF, BPLF tidak memiliki transisi yang tajam
pada frekuensi cutoff.
• Dalam kasus seperti ini, biasanya frekuensi cutoff didefinisikan
sebagai titik tempat nilai H(u, v)turun sampai level tertentu dibandingkan nilai maksimumnya.
Smoothing Frequency Domain Filters: BLPF (2)
Smoothing Frequency Domain Filters: BLPF (3)
• Contoh hasil filtering menggunakan BLPF dapat dilihat pada
gambar berikut.
• Perhatikan bahwa dalam gambar berikut tidak teramati adanya
efek ringing.
• Hal ini disebabkan karena transisi yang tidak tajam pada
Smoothing Frequency Domain Filters: BLPF (4)
Smoothing Frequency Domain Filters: BLPF (5)
Smoothing Frequency Domain Filters: BLPF (6)
Smoothing Frequency Domain Filters: BLPF (7)
• BLPF orde 1 tidak memiliki efek ringing. BLPF orde 2 sudah
memiliki efek ringing, tetapi pada umumnya tidak teramati.
• Fenomena ringing semakin parah jika orde BLPF semakin tinggi.
• BLPF dengan orde 20 sudah memiliki efek ringing yang mirip
dengan ILPF.
• Pada umumnya, digunakan BLPF orde 2 sebagai kompromi
antara efektifitas filter dan fenomena ringing.
• Plot BLPF dengan berbagai orde ditunjukkan pada gambar
Smoothing Frequency Domain Filters: GLPF (1)
• Sebuah GLPF 2-D diberikan oleh hubungan
H(u, v) =e−D2(u,v)/2σ2 (35)
• Dalam Persamaan (35),σ adalah ukuran “spread” kurva Gaussian.
Jika kita definisikanσ =D0maka dapat dituliskan
H(u, v) =e−D2(u,v)/2D20 (36)
• Dalam persamaan (36), D0adalah frekuensi cutoff. Jika
D(u, v) =D0, magnitude filter memiliki nilai 0.607 kali nilai
Smoothing Frequency Domain Filters: GLPF (2)
• Seperti telah disebutkan di depan, filter spatial
h(x, y) =F−1H(u, v)dalam kasus ini juga berupa kurva Gaussian.
• Dari sini dapat disimpulkan bahwa implementasi GLPF tidak akan
menimbulkan fenomena ringing.
Smoothing Frequency Domain Filters: GLPF (3)
Smoothing Frequency Domain Filters: GLPF (4)
• Gambar-gambar berikut menunjukkan contoh output GLPF.
• Dari gambar-gambar ini terlihat bahwa efek smoothing GLPF
tidak sebaik BLPF untuk nilai frekuensi cutoff yang sama. (Dengan kata lain, GLPF tidak terlalu “selektif”).
• Meskipun demikian, GLPF memiliki keunggulan karena terdapat
jaminan tidak munculnya ringing. Hal ini sangat penting pada aplikasi-aplikasi yang tidak mengijinkan adanya artifact dalam bentuk apapun.
Smoothing Frequency Domain Filters: GLPF (5)
Smoothing Frequency Domain Filters: GLPF (6)
Smoothing Frequency Domain Filters: GLPF (7)
Sharpening Frequency Domain Filters: Intro (1)
• Operasi sharpening dalam ranah frekuensi merupakan kebalikan
operasi smoothing/blurring.
• Operasi sharpening dilakukan dengan menekan
komponen-komponen frekuensi rendah dan meloloskan komponen frekuensi tinggi.
• Jadi secara umum sebuah HPF dapat diperoleh dengan
menggunakan hubungan
Hhp(u, v) =1−Hl p(u, v) (37)
• Pada bagian ini akan dibahas HPF ideal (IHPF), Butterworth
Sharpening Frequency Domain Filters: Intro (2)
Sharpening Frequency Domain Filters: Intro (3)
Sharpening Frequency Domain Filters: Intro (4)
Sharpening Frequency Domain Filters: Intro (5)
• Sama seperti pada LPF ranah frekuensi, representasi spatial HPF
diatas dapat diperoleh dengan menghitungF−1[H(u, v)].
• Bentuk representasi masing-masing filter dalam ranah spatial
Sharpening Frequency Domain Filters: IHPF (1)
• HPF ideal 2-D didefinisikan sebagai berikut:
H(u, v) =
{
0 jika D(u, v)≤ D0
1 jika D(u, v) >D0
(38)
• Sama seperti ILPF, IHPF juga tidak dapat direalisasikan secara
fisik.
• Kinerja IHPF ditunjukkan pada gambar berikut. Sama seperti ILPF,
IHPF juga menunjukkan fenomena ringing yang parah untuk nilai
Sharpening Frequency Domain Filters: IHPF (2)
Sharpening Frequency Domain Filters: BHPF (1)
• Fungsi alih sebuah BHPF dengan orde n dan freqkuensi cutoff D0
adalah
H(u, v) = 1
1+ [D0/D(u, v)]2n
(39)
• Kinerja BHPF orde 2 ditunjukkan pada gambar berikut. Terlihat
Sharpening Frequency Domain Filters: BHPF (2)
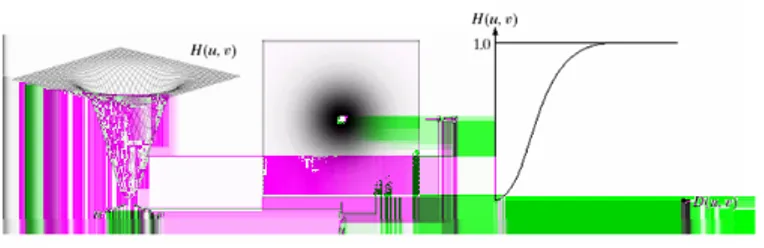
Sharpening Frequency Domain Filters: GHPF (1)
• Fungsi alih GHPF dengan frekuensi cutoff D0adalah
H(u, v) =1−e−D2(u,v)/2D02 (40)
• Kinerja GHPF ditunjukkan pada gambar berikut. Dari gambar
terlihat bahwa hasil filtering GHPF lebih halus dibandingkan kedua filter sebelumnya.
• GHPF dapat juga dibuat berdasarkan selisih 2 buah GLPF.
Pendekatan ini memungkinkan pengaturan yang lebih baik terhadap bentuk filter.
• Akan tetapi, biasanya GHPF diterapkan menggunakan Persamaan
Sharpening Frequency Domain Filters: GHPF (2)
Laplacian in the Frequency Domain (1)
• Dapat dibuktikan bahwa
F [ dnf(x) dxn ] = (ju)nF(u) (41)
• Oleh karena itu, dapat diturunkan
F [ ∂2f(x, y) ∂x2 + ∂2f(x, y) ∂y2 ] = (ju)2F(u, v) + (jv)2F(u, v) =−(u2+v2)F(u, v) (42)
Laplacian in the Frequency Domain (2)
• Atau dengan kata lain
F[∇2f(x, y)] =−(u2+v2)F(u, v) (43)
• Persamaan (43) menyatakan bahwa Laplacian dapat
diimplementasikan dalam ranah frekuensi menggunakan filter
H(u, v) =−(u2+v2) (44)
• Jika transformasi Fourier “centered”, maka Persamaan (44)
menjadi
Laplacian in the Frequency Domain (3)
• Output filter Laplacian, dalam ranah spatial, diperoleh dengan
menghitung
∇2f(x, y) =F−1{−[(u−M/2)2+ (v−N/2)2]F(u, v)} (46)
• Sama seperti dalam ranah spatial, citra yang sudah dipertajam
menggunakan filter Laplacian dapat diperoleh dengan menghitung
Laplacian in the Frequency Domain (4)
• Operasi diatas dapat juga dilakukan dengan kernel tunggal
sebagai berikut
Unsharp Masking & High-boost Filtering (1)
• Sama seperti dalam ranah spatial, filter unsharp masking dan
high-boost diperoleh masing-masing dengan menghitung
fus(x, y) = f(x, y)− fl p(x, y) (49) fhb(x, y) =A f(x, y)− fl p(x, y) (50)
• Dalam ranah frekuensi, operasi unsharp masking dapat dilakukan
menggunakan filter komposit sebagai berikut
Hus(u, v) =1−Hl p(u, v) (51)
Unsharp Masking & High-boost Filtering (2)
• Sedangkan operasi high-boost filtering dapat dilakukan dengan
filter komposit sebagai berikut
Hhb(u, b) = (A−1) +Hhp(u, v) (52)
dengan Hhp(u, v)merepresentasikan sebuah filter high-pass.
• Secara umum, kinerja filter unsharp masking dan high-boost
pada ranah frekuensi setara dengan filter-filter pada ranah spatial.
High-Frequency Emphasis Filter
• Filter ini akan menonjolkan (accentuate) kontribusi komponen
frekuensi tinggi pada image enhancement.
• Hal ini dapat dicapai menggunakan filter sebagai berikut
Hh f e(u, v) =a+bHhp(u, v) (53)
dengan a≥0 dan b>a.
• Nilai-nilai a dan b yang sering digunakan masing-masing masing
antara 0.25 sampai 0.5 dan antara 1.5 sampai 2.0.
• Dapat dilihat bahwa filter ini sama dengan filter high-boost jika
Frequency Domain Denoising Filters: Intro
• Proses denoising dapat juga dilakukan di ranah frekuensi.
• Noise yang cocok ditangani di ranah frekuensi adalah noise yang
bersifat periodik.
• Dalam bab ini akan dibahas filter-filter ranah frekuensi yang
dapat digunakan untuk menghilangkan noise periodik, yaitu filter band-reject (BRF), band-pass (BPF) dan notch.
Frequency Domain Denoising Filters: BRF (1)
• Filter band-reject menghilangkan atau menekan satu pita
frekuensi disekeliling titik pusat transformasi Fourier.
• Sebuah filter band-reject ideal didefinisikan sebagai berikut:
H(u, v) = 1 jika D(u, v) <D0−W2 0 jika D0− W2 ≤ D(u, v)≤ D0+W2 1 jika D(u, v) >D0+W2 (54)
Frequency Domain Denoising Filters: BRF (2)
• Sebuah filter band-reject Butterworth orde-n didefinisikan
sebagai berikut: H(u, v) = 1 1+ [ D(u,v)W D2(u,v)−D2 0 ]2n (55)
• Sebuah filter band-reject Gaussian didefinisikan sebagai berikut:
H(u, v) =1−e− 1 2 [ D2(u,v)−D20 D(u,v)W ]2 (56)
Frequency Domain Denoising Filters: BRF (3)
Figure 38: Plot BRF ideal (kiri), Butterworth orde 1 (tengah) dan Gaussian (kanan)
Frequency Domain Denoising Filters: BRF (4)
• BRF tepat digunakan untuk menghilangkan noise jika letak
komponen noise dalam ranah Fourier kurang lebih diketahui.
• Dalam contoh berikut, sebuah citra mengalami degradasi karena
noise sinusoidal. Komponen noise ini tampak jelas dalam spektrum Fourier.
• Untuk menghilangkan noise tersebut, dirancang sebuah filter
band-reject Butterworth orde 4 dengan pilihan radius dan lebar pita sedemikian sehingga semua titik spektrum noise tersebut dapat terlingkupi.
Frequency Domain Denoising Filters: BRF (5)
Frequency Domain Denoising Filters: BRF (6)
Frequency Domain Denoising Filters: BPF (1)
• Sebuah filter band-pass melakukan operasi yang berlawanan
dengan filter band-reject.
• Filter band-pass Hbp(u, v)dapat dibuat berdasarkan sebuah filter
band-reject Hbr(u, v)dengan hubungan
Hbp =1−Hbr(u, v) (57)
• Penggunaan BPF secara langsung terhadap suatu citra tidak
lazim karena hal ini pada umumnya akan menyebabkan hilangnya terlalu banyak detail citra.
• Biasanya, BPF digunakan untuk mengisolasi sinyal derau agar
Frequency Domain Denoising Filters: BPF (2)
Figure 41: Hasil filtering citra dengan noise sinusodal, menunjukkan bentuk sinyal noise tanpa “gangguan” isi citra.
Frequency Domain Denoising Filters: Notch (1)
• Sebuah filter notch menekan (atau melalukan) frekuensi yang
berada pada suatu lingkup tertentu disekeliling sebuah frekuensi tengah.
• Karena sifat simetri transformasi Fourier, filter notch harus
muncul sebagai pasangan yang simetris terhadap titik pusat transformasi (jumlah pasangan sembarang).
• Perkecualian dari aturan diatas adalah jika frekuensi tengah ada
pada titik pusat transformasi.
• Plot filter notch ideal, Butterworth dan Gaussian ditunjukkan
Frequency Domain Denoising Filters: Notch (2)
Frequency Domain Denoising Filters: Notch (3)
• Fungsi alih sebuah filter notch-reject dengan radius D0dan
frekuensi tengah pada(u0, v0)dan(−u0,−v0)adalah
H(u, v) = { 0 jika D1(u, v)≤D0atau D2≤ D0 1 lainnya (58) dengan D1(u, v) = [ (u−M/2−u0)2+ (v−N/2−v0)2 ]1/2 (59) dan [ − 2 − 2]1/2
Frequency Domain Denoising Filters: Notch (4)
• Fungsi alih suatu filter notch-reject Butterworth orde n adalah
sebagai berikut: H(u, v) = 1 1+ [ D2 0 D1(u,v)D2(u,v) ]2 (61)
• Fungsi alih sebuah filter notch-reject Gaussian adalah sebagai
berikut: H(u, v) =1−e− 1 2 [ D1(u,v)D2(u,v) D20 ] (62)
Frequency Domain Denoising Filters: Notch (5)
• Sama seperti pada pembahasan yang lalu, sebuah filter notch
untuk melalukan (pass) frekuensi tertentu dapat dibuat dengan berdasarkan filter notch-reject menggunakan hubungan
Hnp(u, v) =1−Hnr(u, v) (63)
• Jika u0 =v0 =0 sebuah filter notch-pass menjadi HPF.
• Contoh penggunaan filter notch ditunjukkan pada
Frequency Domain Denoising Filters: Notch (6)
Frequency Domain Denoising Filters: Notch (7)
Figure 44: Spektrum citra (kiri); spektrum sebuah notch-pass filter yang ditumpangkan pada spektrum citra (kanan)
Frequency Domain Denoising Filters: Notch (8)
Figure 45: Derau yang telah dipisahkan dari citra (kiri); hasil notch-reject filtering (kanan)