APPLICATION OF DC MOTOR AS A PROPELLER MOVER OF TUGBOAT SHIP A.N. Afandi, Senior Member IAEng
Power System and Controlling Operation State University of Malang, East Java, Indonesia
[email protected], http:scienta.i8.com
Abstract
System of propeller mover is very important as a part of propeller for working the ship, besides that the pulling or pushing power for moving and resistance of ship was considered as the point to designing. Then the objects on direct current motor as propeller mover is to find the alternative mover that still have an ability moving on the sea, that are it have to use the method to fix power capacity and dynamic condition on operated speed. Based on analysis it got capacity of pulling power or pushing power is 70,54 kW, direct current motor capacity is 97,97 kW and rotation is 169,942 rad/s on operated speed 14,785 m/s.
Keywords: resistance, mover, gravitation, inertia and viscosity.
PENGGUNAAN MOTOR ARUS SEARAH
SEBAGAI PENGGERAK BALING-BALING KAPAL LAUT Abstrak
Sistem penggerak merupakan bagian yang sangat penting untuk menjalankan kapal, selain itu daya dorong atau daya tarik mesin penggerak dan tahanan yang berpengaruh pada kapal juga harus dipertimbangkan. Selanjutnya tujuan penggunaan motor arus searah ini adalah untuk memperoleh suatu penggerak alternatif kapal yang masih memenuhi kondisi olah gerak kapal di laut. Hal tersebut dilakukan dengan metode penentuan kapasitas daya mesin penggerak dan analisis manuver kapal pada kecepatan operasi. Berdasarkan hal tersebut diperoleh daya dorong kapal 70,54 kW, daya yang diperlukan motor arus searah 97,97 kW, serta diperoleh putaran 169,942 rad/s pada kecepatan operasi kapal 14,785 m/s.
Kata-kata kunci: hambatan, penggerak, gravitasi, inersia dan viskositas
1. Pendahuluan 1.1. Latar Belakang
Saat ini perkembangan teknologi perkapalan di Indonesia telah mencapai kemajuan tingkat internasional, perkembangan dibidang perkapalan tersebut merupakan bagian dari pengembangan teknologi pada umumnya di Indonesia. Usaha untuk mengembangkan, menerapkan dan menguasai teknologi perkapalan telah dilakukan secara terencana, tertib dan terarah dengan memanfaatkan semua sumber daya yang dimiliki. Pengembangan teknologi perkapalan ini sudah cukup maju dan merupakan indikasi kemampuan penguasaan teknologi dalam bidang kelautan.
Sesuai dengan teknologi perkapalan yang ada dan untuk menunjang kemajuan dibidang kelautan, maka untuk melayani transportasi jalur yang melalui laut banyak diproduksi kapal untuk memenuhi kebutuhan sebagai angkutan umum ataupun untuk sarana transportasi khusus. Dalam memenuhi fungsinya sebagai sarana transportasi tersebut, maka kapal harus mampu bertahan terhadap keadaan cuaca, serta hempasan gelombang ombak yang datang dari berbagai penjuru. Kapal juga harus mampu memadukan kekuatan dan kelenturan, memiliki tenaga yang cukup dan keseimbangan yang tepat untuk mengikuti hantaman gelombang ombak.
Umumnya kapal menggunakan mesin diesel sebagai tenaga penggerak baling-baling atau propeler, namun penggunaan mesin diesel sebagai tenaga penggerak baling-baling memiliki beberapa permasalahan dan kelemahan, antara lain: menimbulkan kebisingan, memerlukan peralatan pendukung yang banyak dan pemeliharaanya relatif sulit. Oleh karena itu untuk mengatasi permasalahan tersebut, perlu adanya alternatif mesin yang digunakan sebagai penggerak kapal. Sebagai salah satu alternatif pemecahan masalah tersebut, maka perlu dikaji penggunaan motor arus searah sebagai penggerak kapal.
1.2. Rumusan Masalah
Untuk menentukan motor arus searah yang akan digunakan dan dinamika kapal yang diinginkan, maka dapat dirumuskan suatu permasalahan sebagai berikut: Berapa kapasitas daya yang diperlukan motor arus searah yang akan digunakan sebagai penggerak baling-baling kapal, berapa putaran motor arus searah pada kecepatan operasi kapal, dan bagaimana cara mengatur kecepatan kapal.
1.3. Batasan Masalah
Selanjutnya melihat permasalahan yang ada, maka dibatasi pada penggunaan sistem pengaturan putaran motor arus searah dengan Sistem Ward Leonard, hanya menentukan perencanaan segi teknis tanpa analisis investasi biaya, serta tiupan angin tidak diperhitungkan dan tegangan kerja pada kapal dengan catu daya AC 220 volt.
1.4. Tujuan
Tujuan utama pembahasan ini adalah untuk memperoleh suatu penggerak alternatif kapal yang masih memenuhi kondisi olah gerak kapal di laut, yaitu meliputi dinamika kapal, kecepatan operasi kapal yang diijinkan dan pengaturan manuver kecepatan kapal.
2. Tinjauan Pustaka 2.1. Tahanan Kapal
Tahanan kapal adalah suatu gaya fluida yang bekerja pada kapal sedemikian rupa, sehingga melawan gerakan kapal yang melaju dengan kecepatan tertentu. Dalam hidrodinamika, tahanan kapal merupakan jumlah seluruh tahanan yang bekerja pada kapal.
2.1.1. Komponen Tahanan Kapal
Dalam perencanaan sistem penggerak kapal atau sistem penggerak baling-baling, komponen tahanan kapal yang paling diperhitungkan adalah tahanan gesek, tahanan gelombang, tahanan udara dan tahanan Eddy. Namun biasanya tahanan Eddy diabaikan, karena memberikan pengaruh yang sangat kecil. Dengan demikian tahanan yang berpengaruh pada kapal hanya tahanan gesek, tahanan gelombang dan tahanan udara.
2.1.2. Penentuan Tahanan Kapal
Untuk menentukan tahanan kapal dapat digunakan Metode Froude, yaitu suatu metode yang digunakan hampir pada semua Towing Tank. Dalam metode ini, seluruh tahanan yang bekerja pada kapal dibagi menjadi dua bagian, yaitu tahanan gesek dan tahanan sisa. Pembagian ini didasarkan pada pengaruh gravitasi, inersia dan viskositas. Tahanan sisa dikarenakan pengaruh gaya gravitasi dan gaya inersia. Sedangkan tahanan gesek dipengaruhi oleh gaya inersia dan gaya viskositas.
Dengan mengacu pada Metode Froude maka didapatkan koefisien total tahanan (CT) yang
dikarenakan oleh pengaruh kedua tahanan tersebut. Jadi tahanan (Rk) yang dimiliki oleh
kapal ketika bergerak di air dapat ditentukan sebagai berikut [Harvald, 1992; 133]:
Rk = CT x 0,5 x Vk 2
x S x (1)
Dimana Rk adalah tahanan kapal (N), CT
koefisien total tahanan kapal, Vk kecepatan
kapal (m/s), S luas bidang atas kapal (m2) dan
adalah massa jenis air (kg/m3).
Selanjutnya untuk olah gerak kapal, besaran geometrik kapal dianggap tetap dan tahanan kapal didekati ketika kapal bermanuver dengan konstanta tahanan kapal krk, dan dapat
ditentukan sebagai berikut [Lewis, 1988; 253]: Rk = krk x Vk
2
(2)
2.1.3. Penentuan Kapasitas Daya Dorong
Penentuan kapasitas daya dorong kapal dapat dilakukan dengan metode diagram dan hitungan. Bila daya dorong kapal ditentukan dengan metode diagram, maka harus menggunakan diagram daya dari jenis kapal yang sesuai dan disesuaikan dengan bobot mati kapal (DWT) pada kecepatan operasi kapal yang diinginkan. Tapi bila daya dorong kapal
ditentukan dengan metode hitungan, maka harus ditentukan semua besaran yang berpengaruh pada tahanan kapal. Bila PB
adalah daya dorong/tarik kapal (watt), Rk
tahanan kapal (N) dan Vk kecepatan kapal
(m/s), maka daya dorong/tarik kapal dapat ditentukan sebagai berikut [Harvald, 1992; 135]:
PB = Rk x Vk (3)
Selanjutnya dengan memperhatikan semua sistem mekanis untuk menggerakan baling-baling kapal dan semua efisiensi yang berpengaruh yaitu efisiensi baling-baling (B),
efisiensi hull kapal (H) dan efisiensi roda gigi
(S), maka kapasitas mesin penggerak dapat
ditentukan sebagai berikut [Harvald, 1992; 300]: PE = S B H B
η
x
η
x
η
P
(4)2.2. Sistem Penggerak Kapal
Sistem penggerak kapal merupakan suatu mekanisme yang akan memutar baling-baling. Sistem penggerak yang paling sederhana adalah dengan menggunakan tenaga manusia yang disalurkan lewat dayung, perkembangan berikutnya menggunakan tenaga angin yang dipekerjakan melalui layar. Dan kini sistem penggerak kapal lebih maju dari sebelumnya, yaitu menggunakan alat mekanis atau mesin untuk memutar baling-baling. Selanjutnya dalam pembahasan ini sistem penggerak kapal akan menggunakan motor arus searah sebagai penggeraknya.
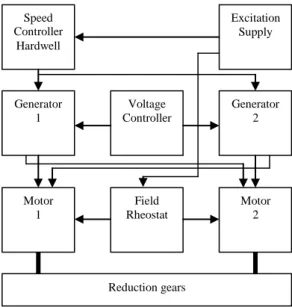
Pada gambar 1 adalah rangkaian sistem penggerak baling-baling kapal secara elektris dan menggunakan dua motor arus searah, dua generator arus searah. Pada sistem penggerak baling-baling kapal tersebut, baling-baling akan diputar melalui poros yang terhubung secara mekanis ke roda gigi, putaran motor arus searah akan dikurangi pada rangkaian mekanis roda gigi (reduction gear).
Arus penguatan medan motor arus searah diberikan melalui sumber arus searah (excitation supply). Tahanan medan (field rheostat) digunakan untuk mengatur arus penguatan medan yang mengalir pada belitan medan motor arus searah. Pengaturan berapa besar arus yang mengalir melalui belitan medan ke motor arus searah 1 dan motor arus
searah 2 digunakan tahanan variabel (field rheostat) yang terpasang diantara kedua belitan medannya. Begitu juga untuk generator searah, arus penguatan medan diberikan melalui sumber arus searah tersendiri (excitation supply). Pengaturan putaran motor arus searah dapat dilakukan melalui pengaturan kecepatan (speed controller hardwell) yang mengendalikan arus penguatan medan generator searah, sehingga tegangan pencatu motor arus searah dapat berubah-ubah.
Gambar 1. Sistem elektris penggerak kapal Sumber: DNSSC, 1967: 9
2.3. Motor Arus Searah
Motor arus searah adalah suatu mesin listrik yang berfungsi untuk mengubah energi listrik arus searah menjadi energi mekanik atau gerak, dimana energi gerak tersebut berupa putaran pada rotornya.
2.3.1. Klasifikasi
Pada motor arus searah, rangkaian medan dan rangkaian jangkar dapat dihubungkan dengan beberapa cara agar memberikan karakteristik yang berbeda-beda, hal ini merupakan kelebihan motor arus searah dibandingkan dengan motor jenis yang lain. Berdasarkan cara menghubungkan belitan medan dan belitan jangkar, maka motor arus searah dapat dibedakan menjadi motor shunt, kompon dan seri. Sedangkan berdasarkan sumber yang mencatu belitan medan, maka motor arus searah dapat dibagi menjadi motor arus searah penguatan sendiri dan penguatan terpisah.
Speed Controller Hardwell Excitation Supply Voltage Controller Generator 1 Generator 2 Field Rheostat Motor 1 Motor 2 Reduction gears
2.3.2. Karakteristik
Karakteristik motor arus searah dalam hal ini adalah karakteristik yang menunjukan unjuk kerja motor arus searah penguatan terpisah yang akan digunakan sebagai penggerak kapal. Sehingga menjadi pertimbangan bagi manuver gerakan kapal ketika melaju dengan kecepatan operasi tertentu di permukaan air. Biasanya karaktersitik ini sangat tergantung pada tegangan (U), arus jangkar (Ia), tahanan
jangkar (Ra) dan medan magnet ().
Untuk menentukan karakterisk putaran motor arus searah penguatan terpisah, maka perlu diperhatikan persamaan dasar yang ada kaitannya dengan putaran n =
C.
.R
I
U
a a . Karena umumnya penguatan motor arus searah penguatan terpisah disuplai sendiri atau arus penguatannya diatur pada nilai tertentu, maka fluksi magnetnya juga konstan. Dengan demikian karakteristik putarannya sangat tergantung pada tegangan pencatunya.Untuk menentukan karakteristik torsi motor arus searah penguatan terpisah harus memperhatikan fungsi dasar T = k. Ia. .
Dimana fluksi magnet pada motor ini adalah konstan, karena arus penguatannya tetap. Jadi karakteristiknya sangat terpengaruh pada arus jangkar.
Karakteristik mekanis motor arus searah menunjukan interaksi antara beban dan motor, atau antara penggerak dan kapal. Dalam hal ini akan berpengaruh pada putaran motor arus searah atau kecepatan motor pada setiap beban atau torsi.
2.3.3. Membalik Putaran
Dengan mengacu pada T = k. Ia. , maka torsi
motor arus searah dipengaruhi oleh arus jangkar dan medan magnet. Membalik putaran artinya membalik torsi semula atau membuat torsi semula menjadi negatif. Dengan demikian dapat dilakukan dengan cara membalik salah satu dari arus jangkar atau medan magnet. Jadi dilakukan dengan membalik arah arus jangkar semetara itu fluksi magnet dibuat tetap. Membalik arah putaran motor arus searah juga dapat dilakukan dengan cara membalik arah fluksi magnet sementara itu arus jangkar dibuat tetap, pada pembalikan
arah fluksi magnet dilakukan dengan cara membalik arah arus penguatan medan magnet. Membalik arah putaran motor arus searah tidak dapat dilakukan dengan cara membalik secara bersamaan arus jangkar dan medan magnet, karena akan menghasilkan torsi yang tetap atau putarannya tidak berubah.
2.3.4. Pengasutan
Pengasutan (start) motor arus searah bertujuan untuk memperkecil arus jangkar, karena pada saat diasut motor belum berputar, sehingga tegangan lawannya nol. Dengan demikian arus jangkar yang mengalir melalui rangkaian jangkar akan besar dan dapat menyebabkan kerusakan, oleh karena itu harus dibatasi. Hal ini dapat dilakukan dengan cara menambahkan tahanan asut pada rangkaian jangkar atau dengan tegangan asut yang variabel mulai kecil hingga tegangan nominalnya.
2.3.5. Pengaturan Putaran
Penggunaan motor arus searah sangat sesuai untuk keperluan yang putarannya dapat diatur dalam rentang yang lebar, karena pengaturan putaran motor arus searah dapat dilakukan dengan mudah. Selanjutnya untuk mengatur putaran motor arus searah dapat dilakukan dengan cara mengatur tegangan yang mencatu, mengatur tahanan jangkar dan mengatur fluksi magnet.
2.3.6. Pengereman
Pengereman motor arus searah dapat dilakukan dengan tiga cara, yaitu pengereman secara regeratif, dinamis dan plugging. Pengereman secara regeratif berarti mengembalikan energi listrik ke jala-jala yang mencatu motor arus searah, yaitu membuat GGL lawannya lebih besar dari tegangan yang mensuplai. Sehingga motor arus searah yang semula dioperasikan sebagai motor kini harus dioperasikan sebagai generator. Pengereman secara dinamis dilakukan dengan mengubah energi listrik menjadi energi panas melalui tahanan. Hal ini terjadi karena sewaktu tegangan pencatu diputus, motor tidak langsung berhenti tetapi masih berputar, sehingga sisa energi yang ada harus dibuang agar motor cepat berhenti. Pengereman secara plugging dilakukan dengan cara membalik arah putaran motor arus searah, pembalikan arah putaran ini dapat dilakukan dengan membalik arah arus jangkar atau membalik arah arus penguatan medan magnet.
0 50 100 150 200 250 300 1 2 3 4 5 6 7 8 Kecepatan (m/s) D a y a (k W )
Daya Dorong Daya Penggerak
3. Hasil dan Pembahasan
Pembahasan pada olah gerak kapal yang merupakan dinamika penggerak kapal dengan menggunakan motor arus searah ini menggunakan spesifikasi kapal yang meliputi panjang kapal di air 29,5 meter, tinggi kapal 10 meter dan lebar kapal 4,8 meter, serta baling-baling yang digunakan memiliki 4 buah sayap dan berdiameter 1,42 meter.
3.1. Kapasitas Daya Dorong
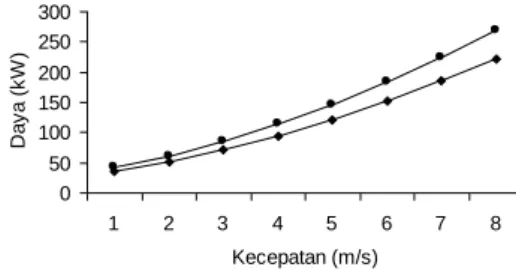
Dengan memperhatikan spesifikasi teknis kapal yang digunakan, maka diperoleh daya dorong kapal pada berbagai kecepatan dasar yang diinginkan seperti pada tabel 1.
Tabel 1. Daya dorong kapal
Vk (m/s) RK (N) PB (kW) PE (kW) 3.3 10.549 34.812 42.044 3.8 13.386 50.867 61.433 4.3 16.405 70.54 85.198 4.8 19.558 93.88 113.382 5.3 22.088 120.847 145.95 5.8 26.088 151.311 182.742 6.3 29.374 185.054 223.494 6.8 32.613 221.771 267.839 Sumber: Hasil dan analisa data
Dengan demikian dapat digambarkan hubungan daya dorong kapal dengan kecepatan kapal sebagaimana pada grafik 1.
Grafik 1. Hubungan kecepatan dan daya Sumber: Hasil analisa
Dengan mempertimbangkan desain dan spesifikasi teknis kapal, serta kecepatan awal yang direncanakan (4,3 m/s), maka kapasitas
daya mesin penggerak yang dibutuhkan adalah 58,198 kW. Selanjutnya penyesuaian kapasitas daya mesin penggerak baling-baling ini dimaksudkan untuk memperoleh daya motor arus searah, yaitu dengan mempertimbangkan 15% fluktuasi yang dimungkinkan, jadi kapasitas motor arus searah tersebut sekitar (1 + 0,15) x 85,198 kW atau sekitar 97,97 kW. Kemudian dengan memperimbangkan tegangan yang berlaku pada kapal, maka dipilih tegangan operasional bagi motor 220 volt. Namun dengan penyesuaian kapasitas daya yang ada, maka dapat dipilih kapasitas 100 kW dengan tegangan 220 volt dan putaran 2000 rpm.
3.2. Kecepatan Operasi
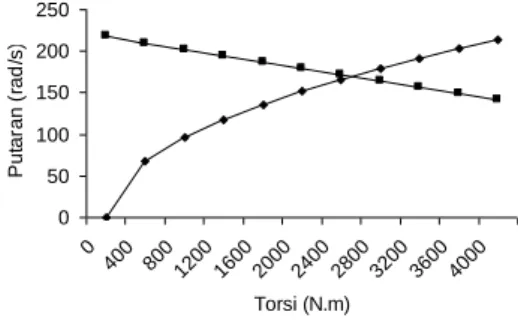
Kecepatan operasi kapal menunjukan interaksi antara beban dan baling-baling, dan kecepatan operasi kapal ini adalah kecepatan keadaan mantab yang ditentukan berdasarkan perpotongan kurva karakteistik mekanis baling-baling dan motor arus searah. Untuk menentukan kecepatan operasi kapal, maka titik operasi ditentukan dengan meninjau baling-baling dan motor arus searah secara terpisah, bukan sebagai suatu interaksi secara langsung pada mekanisme penggerak kapal. Hasil interaksi kedua hal tersebut seperti pada tabel 2.
Tabel 2. Torsi dan putaran
Tmotor=Tbaling-baling baling-baling motor
0 0 217.68 400 67.81 210.08 800 95.89 202.48 1200 117.44 194.88 1600 135.61 187.28 2000 151.62 179.68 2400 166.09 172.08 2800 179.4 164.48 3200 191.79 156.88 3600 203.42 149.28 4000 214.42 141.68 Sumber: Hasil dan analisa data
Dengan demikian untuk menentukan kecepatan operasi kapal digunakan karakteristik torsi motor arus searah dan baling-baling sebagaimana pada grafik 2.
Grafik 2. Karakteristik titik operasi kapal Sumber: Hasil analisa
Dengan menggunakan perhitungan matematis, maka berdasarkan hasil perpotongan kurva karakteristik mekanis baling-baling dan motor arus searah diperoleh titik operasi pada putaran 196,942 rad/s atau menghasilkan kecepatan kapal sebesar 14,785 m/s.
3.3. Pengaturan Kecepatan Kapal
Pengaturan kecepatan kapal dapat dilakukan dengan mengatur kondisi baling-baling secara mekanis, tetapi hal ini sangat sulit dilakukan karena menyangkut kondisi fisik baling-baling itu sendiri yang tidak mungkin setiap saat harus dirubah-rubah besarnya. Oleh karena itu yang paling mudah adalah dengan mengendalikan penggeraknya. Dimana pengaturan kecepatan kapal atau putaran baling-baling itu merupakan kondisi peralihan gerak kapal yang berkaitan dengan motor arus searah dan baling-baling, serta dapat dikendalikan dengan menggunakan Sistem Ward Leonard yang diatur melalui tahanan
rheostat (RsvfG) sebagai pengatur seperti yang
ada pada tabel 3.
Tabel 3. Pengaturan kecepatan kapal
RsvfG UM=UG Vk 41.71 225.25 5.85 30.64 275.25 6.75 22.73 325.25 7.57 16.8 375.25 8.35 12.19 425.25 9.07 11.02 440 9.28 Sumber: Hasil dan analisa data
Grafik 3. Pengaturan kecepatan kapal Sumber: Hasil analisa
4. Penutup 4.1. Kesimpulan
Berdasarkan hasil analisa didapatkan daya dorong kapal 70,54 kW, daya yang diperlukan motor arus searah 97,97 kW. Dengan penyesuaian kapasitas yang ada, maka digunakan kapasitas daya 100 kW untuk motor arus searah. Selanjutnya berdasarkan perpaduan kurva karakteristik mekanis baling-baling dan motor arus searah, maka diperoleh putaran 169,942 rad/s atau kecepatan operasi kapal 14,785 m/s. Untuk pengaturan kecepatan kapal dilakukan dengan cara mengatur tahanan sisipan (RsvfG) pada berbagai nilai.
4.2. Saran
Untuk pertama kali menjalankan kapal dari posisi diam, sebaiknya memperhatikan arus jangkar maksimum yang diijinkan pada motor arus searah dan harus memperhatikan kondisi beban kapal, serta keadaan angin yang bertiup.
5. Daftar Pustaka
Department of Naval Sea System Command (DNSSC). 1967. Electric Propulsion Installation. Washington DC. --- 0 50 100 150 200 250 0 400 800 1200 1600 2000 2400 2800 3200 3600 4000 Torsi (N.m) P u ta ra n ( ra d /s) Baling-baling Motor 0 1 2 3 4 5 6 7 8 9 10 41.71 30.64 22.73 16.8 12.19 11.02 Rheostat (ohm) K e ce p a ta n ka p a l (m /s)
Harvald, Sv. Aa. 1992. Tahanan dan Propulsi Kapal. Terj. Sutomo, Jusuf. Airlangga Press. Surabaya.
Lewis, Edward V. 1988. Principles of Naval Architectures. USA. Jersey City Pub. Se, P.C. 1989. Principles of Electric Machines
and Power Electronics. Singapore. John Wiley & Son Inc.