Jurusan Teknik Elektro Fakultas Teknologi Industri
TE091399 TUGAS AKHIR – 4 SKS
Nama Mahasiswa : Handi Rahmannuri Nomor Pokok : 2211106037 Bidang Studi : Elektronika
Tugas Diberikan : Semester Genap 2012/2013
Dosen Pembimbing : 1. Ronny Mardiyanto, ST, MT, Ph.D 2. Dr. Ir. Djoko Purwanto, M.Eng.
Judul Tugas Akhir : Rancang Bangun Navigasi Robot Pengangkut Sampah Berbasiskan Garis Lantai
Uraian Tugas Akhir
Laporan ini menjelaskan bagaimana cara membangun sebuah navigasi secara otomatis dari robot pengangkut sampah. Cara kerja robot adalah, pertama robot belajar untuk mengenali kondisi lingkungan melalui tracking area yang dilintasi robot secara manual menuju titik dimana tempat sampah berada dan pada waktu yang bersamaan mengambil data berupa jumlah perpotongan garis vertikal dan horisontal dari ubin, metode ini dinilai paling mudah untuk proses mapping robot. Selanjutnya data hasil pembelajaran digunakan untuk menentukan arah pergerakan robot. Sensor yang digunakan untuk membaca lingkungan sekitar adalah web cam, jadi semua proses record data menggunakan metode pengolahan citra. Salah satu metode pengolahan citra yang ditekankan adalah template matching, jadi dengan meng-capture lantai secara keseluruhan kemudian meng-crop perpotongan garis yang nantinya akan dijadikan sebagai template referensi, kemudian pada saat kamera dijalankan maka secara otomatis akan mendeteksi jumlah perpotongan garis.
Kata kunci : Navigasi, Pengolahan Citra, Template Matching, Web cam, Vertikal, Horisontal ,Mapping dan Ubin.
Dosen Pembimbing I, Dosen Pembimbing II,
Roni Mardiyanto, ST, MT, Ph.D Dr. Ir. Djoko Purwanto, M.Eng. NIP : 198101182003121003 NIP : 196512111990021002
Mengetahui, Menyetujui,
Jurusan Teknik Elektro ITS Bidang Studi Teknik Elektronika
Ketua, Koordinator,
Dr. Tri Arief Sardjono, ST, MT. Ir. Tasripan, MT.
JUDUL TUGAS AKHIR
Rancang Bangun Navigasi Robot Berbasiskan Garis Lantai
A. RUANG LINGKUP digunakan untuk membantu pekerjaan manusia dalam banyak hal. Misal di dunia industri robot sudah menjadi bagian utama dalam proses industri tersebut bahkan peranan robot sudah meluas tidak hanya didunia industri saja. Salah satu usaha pengembangan di hal robotika salah satunya adalah membuat navigasi robot pengangkut sampah berbasiskan garis lantai, jadi robot akan dapat bergerak menuju target yang diinginkan tanpa dikontrol oleh manusia, misal digunakan untuk memindahkan atau mengangkut suatu barang didalam industri, sehingga apabila ini diterapkan dapat menambah efisiensi dan efektifitas kerja karyawan. Dalam aplikasi ini proses mapping menggunakan sensor web cam. Selanjutnya data yang diperoleh akan diproses menggunakan metode image processing.
C. RUMUSAN MASALAH
Rumusan masalah dalam tugas akhir ini adalah:
1. Bagaimana cara robot mengenali cross line (perpotongan garis lantai)? 2. Bagaimana cara mengestimasi jarak objek berdasarkan cross line? 3. Bagaimana cara membuat peta (mapping) dari data hasil tracking? D. BATASAN MASALAH
Batasan masalah pada tugas akhir ini adalah:
Algoritma pendekatan croos line (perpotongan garis lantai).
E. TUJUAN
Penelitian pada tugas akhir ini bertujuan sebagai berikut:
F. SISTEM SECARA UMUM dan TINJUAN PUSTAKA
Sistem Secara Umum
Deteksi Tepi
Deteksi tepi (Edge Detection) pada suatu citra adalah suatu proses yang menghasilkan tepi-tepi dari obyek-obyek citra, tujuannya adalah :
• Untuk menandai bagian yang menjadi detail citra
• Untuk memperbaiki detail dari citra yang kabur, yang terjadi karena error atau adanya efek dari proses akuisisi citra
Suatu titik (x,y) dikatakan sebagai tepi (edge) dari suatu citra bila titik tersebut mempunyai perbedaan yang tinggi dengan tetangganya. Gambar 1 berikut ini meng-gambarkan bagaimana tepi suatu gambar.
Gambar1. Proses Deteksi Tepi Citra
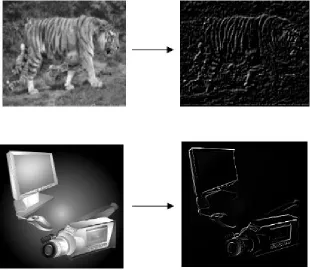
Gambar2. Hasil beberapa Deteksi Tepi
Pada gambar 2. terlihat bahwa tepi suatu gambar terletak pada titik-titik yang memiliki perbedaan tinggi. Berdasarkan prinsip-prinsip filter pada citra maka tepi suatu gambar dapat diperoleh menggunakan High Pass Filter (HPF), yang mempunyai karakteristik:
Contoh:
Diketahui fungsi citra f(x,y) sebagai berikut:
Bila digambarkan maka proses filter di atas mempunyai masukan dan keluaran sebagai berikut:
Catatan:
Untuk mencoba perhitungan di atas dapat dilakukan dengan cara manual menggunakan perhitungan konvolusi yang telah dibahas pada bab 5, atau dengan memanfaatkan program konvolusi.
Macam-macam metode untuk proses deteksi tepi ini, antara lain: 1. Metode Robert
2. Metode Prewitt 3. Metode Sobel
Metode yang banyak digunakan untuk proses deteksi tepi adalah metode Robert, Prewitt dan Sobel, Gonzalez[1].
Metode Robert
Metode Robert adalah nama lain dari teknik differensial yang dikembangkan di atas, yaitu differensial pada arah horisontal dan differensial pada arah vertikal, dengan ditambahkan proses konversi biner setelah dilakukan differensial. Teknik konversi biner yang disarankan adalah konversi biner dengan meratakan distribusi warna hitam dan putih [5], seperti telah dibahas pada bab 3. Metode Robert ini juga disamakan dengan teknik DPCM (Differential Pulse Code Modulation)
Kernel filter yang digunakan dalam metode Robert ini adalah:
Metode Prewitt merupakan pengembangan metode robert dengan menggunakan filter HPF yang diberi satu angka nol penyangga. Metode ini mengambil prinsip dari fungsi laplacian yang dikenal sebagai fungsi untuk membangkitkan HPF.
Kernel filter yang digunakan dalam metode Prewitt ini adalah:
Metode Sobel
Metode Sobel merupakan pengembangan metode robert dengan menggunakan filter HPF yang diberi satu angka nol penyangga. Metode ini mengambil prinsip dari fungsi laplacian dan gaussian yang dikenal sebagai fungsi untuk membangkitkan HPF. Kelebihan dari metode sobel ini adalah kemampuan untuk mengurangi noise sebelum melakukan perhitungan deteksi tepi.
Kernel filter yang digunakan dalam metode Sobel ini adalah:
Template Matching
Template matching merupakan sebuah teknik dalam pengolahan citra digital untuk menemukan bagian-bagian kecil dari gambar yang cocok dengan template gambar. Template matching merupakan salah satu ide yang digunakan untuk menjelaskan bagaimana otak kita mengenali kembali bentuk-bentuk atau pola-pola. Template dalam konteks rekognisi pola menunjuk pada konstruk internal yang jika cocok (match ) dengan stimulus penginderaan mengantar pada rekognisi suatu objek. Atau pengenalan pola terjadi jika terjadi kesesuaian antara stimulus indera dengan bentuk mental internal. Gagasan ini mendukung bahwa sejumlah besar template telah tercipta melalui pengalaman hidup kita. Tiap-tiap template berhubungan dengan suatu makna tertentu. Contoh identifikasi geometri :
Energi cahaya yang terpancar dari suatu bentuk mengena pada retina mata dan diubah menjadi energi neural yang kemudian dikirim ke otak. Selanjutnya terjadi pencarian di antara templatetemplate yang ada. Jika sebuah template ditemukan sesuai (match ) dengan pola tadi, maka subjek dapat mengenal bentuk tersebut. Setelah kecocokan antara objek dan template terjadi, interpretasi pada objek dapat terjadi.
Keunggulan:
(1) Jelas bahwa untuk mengenal bentuk, huruf atau bentuk-bentuk visual lainnya diperlukankontakdenganbentukinternal.
(2) Template matching adalah prosedur pengenalan pola yang sederhana yang didasarkan pada ketepatan konfigurasi informasi penginderaan dengan “konfigurasi” pada otak. (Contohnya:barcode)
Kelemahan :
Jika perbandingan eksternal objek dgn internal objek 1:1, maka objek yang berbeda sedikit saja dengan template tidak akan dikenali. Oleh karena itu, jutaan template yang spesifik perlu dibuat agar cocok dengan berbagai bentuk geometri yang kita lihat dan kenal. Jika memang penyimpanan memori di otak seperti ini, otak tentu seharusnya sangat kewalahan dan pencarian informasi akan memakan waktu, padahal kenyataanya tidak.
Template Matching dapat dibagi antara dua pendekatan, yaitu : pendekatan berbasis fitur dan pendekatan berbasis template. Pendekatan berbasis fitur menggunakan fitur pencarian dan template gambar seperti tepi atau sudut, sebagai pembanding pengukuran matrik untuk menemukan lokasi template matching yang terbagus di sumber gambar. Pendekatan Berbasis Fitur
Sebuah pendekatan berbasis fitur dapat dianggap; pendekatan dapat membuktikan lebih berguna, jika template gambar memiliki fitur yang kuat jika pencocokan di pencarian gambar bisa diubah dengan cara tertentu. Karena pendekatan ini tidak mempertimbangkan keseluruhan dari template gambar, komputasi dapat lebih efisien ketika bekerja dengan sumber gambar beresolusi lebih besar, sebagai pendekatan alternatif, berbasis template, mungkin memerlukan pencarian titik – titik yang berpotensi untuk dapat menentukan dimana lokasi pencocokan yang terbaik dan matching. Pendekatan Berbasis Template
Untuk template tanpa fitur yang kuat, atau ketika sebagian besar template gambar merupakan gambar yang cocok, sebuah pendekatan berbasis template mungkin efektif. Seperti disebutkan di atas, karena berbasis template, template matching berpotensi memerlukan sampling dari sejumlah besar poin, untuk mengurangi jumlah sampling poin dengan mengurangi resolusi pencarian dan template gambar oleh faktor yang sama dan melakukan operasi pada perampingan gambar yang dihasilkan (multiresolusi, atau piramida, pengolahan citra), menyediakan pencarian titik data dalam pencarian gambar sehingga template tidak harus mempunyai pencarian titik data, atau kombinasi keduanya. Motion dan Oklusi
berbeda.
Hal ini juga memungkinkan gambar yang cocok untuk menjadi dikaburkan, atau oklusi oleh obyek, dalam kasus ini, memungkinkan untuk menyediakan banyak template untuk menutupi kemungkinan setiap oklusi. Dalam kasus di mana objek lunak atau poseable, motion juga menjadi masalah, dan masalah yang melibatkan motion dan oklusi menjadi ambigu. Dalam kasus ini, salah satu solusi yang mungkin adalah membagi template gambar ke dalam beberapa sub-foto dan melakukan pencocokan pada setiap subdivisi. Pencocokan Berbasis Template dan Konvolusi
Sebuah metode dasar template matching menggunakan konvolusi bayangan (template), disesuaikan dengan fitur tertentu dari template matching, yang ingin kita deteksi. Teknik ini dapat dengan mudah dilakukan pada gambar abu-abu atau tepi gambar. Hasil konvolusi akan di tempat tertinggi di mana struktur gambar sesuai dengan struktur bayangan, di mana nilai-nilai gambar besar dapat dikalikan dengan nilai-nilai bayanganbesar.
Metode ini biasanya diimplementasi dengan terlebih dahulu memilih sebuah bagian dari pencarian gambar untuk digunakan sebagai template: Kita akan memanggil pencarian gambar S (x, y), dimana (x, y) mewakili koordinat setiap pixel dalam pencarian gambar. Kita akan memanggil template T (x t, y t,), dimana (x t, t y) merupakan koordinat dari setiap pixel dalam template. Kemudian kita hanya memindahkan pusat (atau asal) dari template T (x t, x t,) atas setiap titik (x, y) dalam pencarian gambar dan menghitung jumlah produk antara koefisien dalam S (x, y) dan T (x t, y t,) atas seluruh wilayah dari template. Karena semua kemungkinan posisi dari template yang berkenaan dengan pencarian gambar dianggap posisi terbaik. Metode ini kadang-kadang disebut sebagai 'Linear Spasial Filtering' dan template yang disebut juga sebagai masker penyaring.
Mempercepat Proses
Di masa lalu, tipe spasial filtering biasanya hanya digunakan dalam solusi hardware khusus karena kompleksitas komputasi operasi, namun kita dapat mengurangi kompleksitas ini dengan penyaringan dalam domain frekuensi dari gambar itu, disebut sebagai ' frekuensi domain filtering', hal ini dilakukan melalui penggunaan teorema konvolusi.
Cara lain untuk mempercepat proses pencocokan adalah melalui penggunaan dari suatu gambar piramida. Ini adalah serangkaian gambar, pada skala yang berbeda, yang terbentuk dengan berulang kali menyaring dan subsampling gambar asli agar menghasilkan gambar resolusi berkurang berurutan. Gambar resolusi lebih rendah dapat dicari untuk template (dengan mengurangi resolusi yang sama), untuk menghasilkan posisi semula yang memungkinkan untuk mencari pada skala yang lebih besar. Foto yang lebih besar kemudian dapat dicari dalam jendela kecil di sekitar posisi mulai menemukan lokasi template terbaik. Metode lain untuk mengatasinya yaitu terjemahan, skala, dan rotasigambar.
Implementasi
di atas diterapkan pada gambar abu-abu: karena abu-abu digunakan sebagai intensitas piksel.
G. METODELOGI
Metodelogi yang digunakan dalam rancang bangun Navigasi Robot Pengangkut Sampah Berbasiskan Garis Lantai adalah sebagai berikut:
(a) Referensi Data dan Perancangan Sistem
Pada tahap ini dilakukan pencarian data dan referensi sebagai penunjang dalam Rancang Bangun Navigasi Robot Pengangkut Sampah Berbasiskan Garis Lantai. Sistem dirancang berdasarkan spesifikasi yang dibutuhkan untuk bisa men-tracking lingkungan sekitar.
(b) Perancangan Perangkat
Perangkat pendukung seperti komunikasi serial, mikrokontroller, serta mekanik robot diperlukan pada tahap ini agar robot dapat melakukan tracking secara otomatis. Perancangan perangkat disesuaikan pada datasheet yang telah didapat dari referensi data. Strategi perancangan juga didukung oleh hasil compile dari software Visual C++.
(c) Perakitan dan Pengukuran Perangkat
Setelah sistem pengolahan citra dibuat, selanjutnya akan dilakukan perakitan perangkat. Setelah perangkat berhasil dibuat, akan diadakan pengukuran kinerja masing-masing bagian (sub-sistem) dari perangkat-perangkat tersebut sebelum dilakukan integrasi.
(d) Integrasi dan Pengujian Sistem
Pada tahap ini, hasil dari pengolahan citra akan diintegrasikan dengan mekanik robot melalui komunikasi serial. Setelah diintegrasi akan dilakukan pengujian perangkat untuk mengetahui kinerja yang telah dikembangkan.
(e) Percobaan dan Analisa Kinerja Perangkat
Gambar 3. Diagram Alur Metodelogi Rancang Bangun Navigasi Robot Berbasiskan Garis Lantai.
H. JADWAL KEGIATAN
Untuk menyelesaikan penelitian ini sebagai Tugas Akhir, berikut jadwal kegiatan yang akan dilakukan.
KEGIATAN MINGGU
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
dan Perancangan Sistem
Perancangan Perangkat Perakitan dan Pengukuran Perangkat Integrasi dan Pengujian Sistem Percobaan dan Analisa Kerja Perangkat Penulisan Buku Tugas Akhir
I. RELEVANSI
Hasil yang diperoleh dari tugas akhir ini diharapkan dapat memberi manfaat berikut:
Memberikan rekomendasi mengenai Rancang Bangun Navigasi Robot Pengangkut Sampah Berbasiskan Garis Lantai.
Merealisasikan Navigasi Robot Pengangkut Sampah Berbasiskan Garis Lantai untuk dapat diaplikasikan ke hal yang bermanfaat yang dapat membantu pekerjaan manusi misal dibidang industry,kedokteran,militer, dll.
J. REFERENSI
[1]. http://abikindo.blogspot.com/2010/06/template-matching.html [2]. http://lecturer.eepis-its.edu/~riyanto/citra-bab8.pdf
[3]. http://digilib.its.ac.id/ITS-NonDegree-3100011044182/16145