A-60
Kontrol Kestabilan Robot
Inverted Pendulum
Menggunakan Metode
Liniear Quadratic Regulator
Ahmadi
Jurusan Teknik Elektro, Politeknik SAKTI Surabaya [email protected]
Abstrak
Plant inverted Pendulum adalah system yang non-linier dan tidak stabil, sehingga membutuhkan kontroler yang mampu menangani kedua permasalah tersebut. Kontroler dengan metode Linier Quadratic Regulator (LQR) merupakan salah satu penyelesaian permasalahan system non-linier. Untuk menyelesaikan permasalahan diatas digunakan metode LQR .Untuk optimasi dirancang dua masukan yaitu sudut kemiringan dan kecepatan sudut, Dalam penelitian ini dirancang Robot inverted Pendulum beroda dengan kemampuan untuk menjaga keseimbangan dengan dua roda dan bekerja pada sudut kestabilan antara -150 sampai +150 untuk memperoleh keseimbangan. Hasil pengujian secara real time menunjukan bahwa metode LQR mampu untuk menjaga kekokohan sstem dari gangguan dengan rata-rata 3.71 detik, untuk simulasi diperoleh hasil settling time antara 3.2 detik.
Kata kunci : Sistem Inverted Pendulum, LQR, Matlab/Simulink
1. Pendahuluan
Sistem pendulum terbalik (Inverted Pendulum) adalah sistem yang mensimulasikan sebuah mekanisme kontrol untuk mengatur permasalahan kestabilan. Pendulum terbalik merupakan sistem plant yang dinamis dan nonlinier, sehingga pengaturanya menjadi rumit apabila digunakan sistem kontrol yang konvensional. Dari permaslahan yang ada perlu adanya pengendalian yang bekerja dengan baik pada kondisi yang memiliki banyak ketidakpastian. Berbagai ketidakpastian yang muncul dapat berupa gangguan eksternal, ketidakpastian model, ketidakpastian parameter, ataupun error yang muncul pada saat linierisasi.
Untuk mengontrol sistem balancing robot digunakan metode kontrol Linier Quadratic Regulator (LQR) sebagai umpan balik . Pada kontrol optimal LQR yang perlu dicari adalah konstanta nilai penguatan umpan balik K. Sistem kontrol LQR dirancang dengan dua masukan. Masukan pertama adalah sudut kemiringan robot sedangkan masukan kedua adalah percepatan sudut. Shiroma, et al, (1996); Rasool Kahani, et al, (2011)
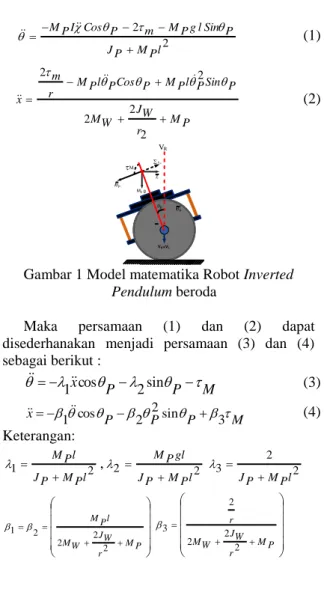
1.1 Model Matematik Inverted Pendulum Robot Inverted Pendulum ini dirancang dengan model segway berupa robot beroda dua yang mampu menyeimbangkan dirinya yang tegak lurus terhadap permukaan bumi di daerah bidang datar. Gaya yang bekerja pada roda dipengaruhi oleh jatuhnya robot kedepan atau kebelakang. Seperti gambar 1 merupakan Model matematika Robot Inverted Pendulum beroda dua dengan dinamika system yang dinyatakan dalam persamaan sebagai
berikut; Graser, et al, (2002); Purwo, (2009); Tri, et al, (2011); Kesama, (2011) : 2 2 l P M P J P Sin l g P M m P Cos I P M (1) P M r W J W M P Sin P l P M P Cos P l P M r m x 2 2 2 2 2 (2) VR Mp g VR+VL p SFxp Ip Ip 2 M
Gambar 1 Model matematika Robot Inverted Pendulum beroda
Maka persamaan (1) dan (2) dapat disederhanakan menjadi persamaan (3) dan (4) sebagai berikut : M P P x 1cos 2sin (3) M P P P x1cos 22sin 3 (4) Keterangan: 2 1 l P M P J l P M , 2 2 l P M P J gl P M 2 2 3 l P M P J P M r W J W M l P M 2 2 2 2 1 P M r W J W M r 2 2 2 2 3
A-61 Untuk persamaan (4) dan (5) masing-masing diturunkan terhadap fungsi :
1 1danF
F dimana turunan fungsi tersebut adalah
x,x,x,,,,M
kemudian masing-masing dilinierisasikan secara dependence. Sehingga FungsiF
1danF
2menjadi persamaan (7) dan (8) sebagai berikut:
OPx OP
M x OP ~ 3 cos 2 sin 1 ~ cos 1 ~
1sinOPx2cosOP
3~M (7)
2 2cos
~ 3~ (8) ~ 2 cos 2 cos 1 ~ cos 1 ~ M OP OP OP OP OP x Dari persamaan 7 dan 8 diperoleh bentuk matriks seperti pada persamaan 9 berikut :
M d M c x b a ~ 3 3 1 1 (9) ab ab ae ab da c 1 3 3 1 1 (10) (3.9) m ab b ab e ab bc d x 1 3 3 1 1 (11) (3.10) Keterangan: OP a1cos ,b1cosOP, OP OP x OP c1sin 2cos 2 2 sin 1 OP OP OP OP d OP OP e22 sin Misal : x1,x1x2,x2, x2
Maka persamaan (10) dan (11) membentuk persamaan state sistem dari proses linierisasi state dependence, seperti M B x x A A x x 2 0 2 1 22 21 1 0 2 1 (12) Keterangan :
OP
OP
OP OP OPx A cos cos 1 ) cos sin ( 1 1 2 1 21
OP
OP
OP OP OP OP OP cos cos 1 cos ) sin ( 1 1 1 2 2 1
OP
OP
OP OP A cos cos 1 cos cos 1 1 1 1 22 ,
OP
OP OP B cos cos 1 cos 1 1 3 1 3 2 1.2 Regulator Optimal (LQR)Linier Quadratic Regulator (LQR) merupakan salah satu metode dalam perencanaan sistem kontrol optimal. Plant diasumsikan bersifat sistem linier dalam bentuk persamaan state, dan fungsi obyektif adalah fungsi kuadratik dari state plant dan sinyal masukan kontrol. Permasalahan dapat
dirumuskan pada kawasan frekuensi menggunakan fungsi-alih. Aris et al.(2013); Rasool Kahani et al, (2011)
Keuntungan dari metode kontrol kuadratis optimal yaitu bentuk dari sistem kontrol dapat menyediakan cara yang sistematis untuk menghitung matriks gain state feedback (K) untuk masukan (u) sebanyak m. Bentuk dari sinyal kontrol, yaitu : ) ( ) (t Kxt u (13)
Dengan bentuk indeks kinerjanya, yaitu:
0 dt Ru T u Qx T x J (14)Dengan memasukan persamaan (13) ke persamaan umum keadaan, maka didapat
x BK A x BuK Ax x ( ) (15) Dengan memasukkan persamaan (13) kedalam persamaan (14), maka didapat persamaan sebagai berikut:
0 x'Qx x'K'RKxxdt
J (16)
Dimana P adalah matriks positif-definite Hermitian atau matriks simetris nyata, sehingga didapatkan persamaan, sebagai berikut :
A BK P P A BK
xx
(17)
Dari persmaan (17) disederhanakan dan menjadi persamaan (18), sebagai berikut :
=
ABK
PP
ABK
QKRK
(18) Jika system dalam kondisi stabil dan nilai eigen didapat bernilai negative, maka terdapat matrik P yang definite positif untuk memenuhi persamaan (18). Apabila nilai matrik P tidak definite positif maka system dikatakan tidak stabil. Indeks performance J dapat dievaluasi sebagai berikut :
0 x'Qx x'K'RKxdt J
0 0 0 x Px x Px Px x (19)Karena system diasumsikan stabil dimana seluruh nilai eigen bernilai negative dengan
0 0x , maka didapat
0Px0x
J (20)
Dengan demikian indeks performansi didapat saat kondisi inisial
x
0
dan P. karena R diasumsikan bernilai definite positif Hermitian, maka R dapat dirumuskan sebagai berikut :T T
R (21)
Dimana T merupakan matrik non-singular, sehingga persamaan (18) dapat diubah menjadi persamaan (19), sebagai berikut :
A-62 Dengan minimisasi J terhadap K, maka K membutuhkan minimalisasi dari persamaan (17) sebagai berikut : x
TK
T BP
TK
T BP
x 1 1 (20)Karena bentuk persamaan diatas tidak negative, maka nilai minimum timbul saat nol, atau pada saat
T BPTK , sehingga
T BP R BPT
K 1 1 1 (21) Matrik P dalam persamaan (21) harus memenuhi persamaan (19), maka dapat disederhanakan pada persamaan (22), sebagai berikut : 0 1 P PA PBR BP Q A (22) 2. Metodologi
2.1 Pemodelan Sistem Inverted Pendulum
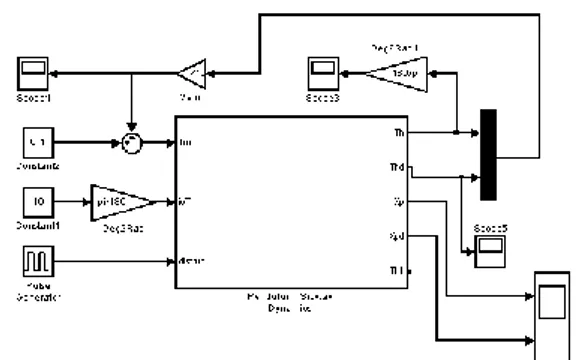
Pada pemodelan sistem Inverted Pendulum ini dirancang dari beberapa bagian diantaranya model sistem dinamik roda, model dinamik chassis robot dan model dinamik robot. Hasil pemodelan tersebut kemudian disederhanakan dengan blok diagram sistem seperti gambar 2 sehingga dapat disimulasikan dengan simulink MATLAB serta diimplementasikan dalam sistem yang real time.
Gambar 2 Diagram blok control Inverted Pendulum
2.2 Perancangan Hardware
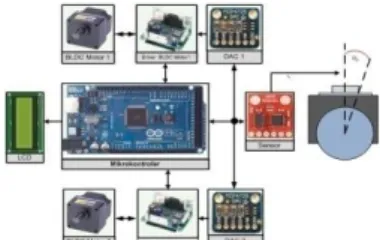
Perancangan hardware pada sistem ini didasarkan pada model yang compac dan simple. Pada model mekaniknya sendiri berdasarkan konsep inverted pendulum. Dengan plant yang dirancang vertical sehingga dapat menyeimbangkan pendulum. System mekanik yang menggunakan motor Brushless DC sebagai penggerak yang terpasang pada titik tengah pendulum, sehingga pendulum memiliki center dalam keseimbangan. Secara detail digambarkan pada gambar 3 dan gambar 4
Gambar 3 Blok Diagram Perancangan Harware
Gambar 4 Bentuk Robot Keseluruhan
Tabel 1 Parameter Robot Inverted Pendulum N o Parameter Pendulum Nilai 1 Gaya Gravitasi (g) 9,8 Kgm2 2 Masa Pendulum (MP) 2.661 Kg 3 Masa Roda (MW) 0,29 Kg 4 Radius Roda (r) 0.075 m
5 Titik Berat Pendulum (l)
0,17 m
6
Moment Inersia Roda (JW)
0,000728 Kgm2
7
Moment Inersia Robot (JP)
0,002661 Kgm2
2.3 Perancangan Software
Sistem kontrol elektronik terbagi atas tiga bagian yaitu sensor, mikrokontroler dan aktuator. Sensor yang digunakan adalah sensor IMU (Inertial Measurement Unit) Dalam system ini digunakan sensor IMU (Inertial Measurement Unit), Accelerometer ADXL345 digunakan untuk mengukur static dan dynamic acceleration dan gyroscope ITG3200 Sedangkan gyroscope digunakan untuk mengukur pitch rate. Accelorometer digunakan untuk mengukur static dan dynamic acceleration. Mikrokontroler arduino mega2560, untuk penggerak dipasang 2 buah motor Brushless DC yang memiliki torsi yang kuat dan dipasang pada sisi kanan dan kiri chassis robot.
Start Inisialisasi Data Sensor LQR Robot Stabil End Y T
Gambar 5 Flowchart System
Dari gambar 5 dapat dijelaskan bahwa input dari sensor akan diproses dalam
A-63 Mikrokontroler dengan metode LQR, kemudian hasil dari pengolahan merupakan sinyal kontrol untuk mengendalikan system menuju kesetabilan.
2.4 Perancangan Kontrol Linier Quadratic
Regulator (LQR)
Metode kontrol optimal Linier Quadratic Regulator (LQR) digunakan untuk mendapatkan sistem yang stabil, yaitu mendekati setpoint, pada kontrol optimal Linier Quadratic Regulator (LQR) yang perlu dicari adalah konstanta Gain State Feedback (K). perhitungan nilai Gain State Feedback (K) adalah sebagai berikut:
K lqr
A,B,Q,R
; (23) Dalam perhitungan Linier Quadratic Regulator (LQR) terlebih dahulu yang harus dilakukan adalah menentukanmatriks pembobot Q dan R. Untuk mendapatkan nilai matriks Q dan R dengan mempertimbangkan hirarki kestabilan pada sekitar titik setimbang, yaitu kestabilan kecepatan sudut lebih utama dari kestabilan posisi sudut dan energi yang digunakan untuk kestabilan lebih dipetingkan dibanding energi drive. Oleh karena itu pertimbangn tersebut yang mendasarii nilai matriks pembobot Q dan R sehingga mampu melakukan proses optimasi berdasarkan hasil identifikasi, dengan syarat matrik Q adalah matrik simetris semidefinit positif dan real (Q0).Pada penelitian ini digunakan matriks Q dengan ordo 2x2 sebagai berikut:
10 0 0 100 Q dan R
1Kontrol kestabilan pada penelitian ini dirancang dengan tujuh titik kerja operating point yang masing-masing adalah sebagai berikut :
rad 0.261799 0 15 x , rad 0.174533 0 10 x
rad
0.087266
0 5
x
, 00
rad
0
x
Dari persamaan (1) dan (2) diperoleh persamaan model matematis dengan hasil linierisasi seperti persamaan (12) dan dinyatakan sebagai persamaan state space, maka diperoleh model nilai state space pada masing-masing sudut Operating Pointt pendulum adalah sebagai berikut:
a. Proses linierisasi pada sudut (150))
0 87.3742 1 0 1 A 115.407 0 1 B
b. Proses linierisasi pada sudut (10o)
0 92.7431 -1 0 2 A 121.5573 0 2 B
c. Proses linierisasi pada sudut (50)
0 96.2375 1 0 3 A 125.5663 0 3 B
d. Proses linierisasi pada sudut 0 radian (
0
0) 0 97.4524 1 0 4 A 126.9610 0 4 B
Adapun nilai-nilai K yang didapat pada masing-masing persmaan state adalah sebagai berikut :
30.8747 10.0267
5 1 K
30.8690 10.0254
10 K
30.8656 10.0246
5 K
30.8645 10.0243
0 K3 Hasil dan Pembahasan 3.1 Hasil Simulasi
Pada sub bab kali ini telah dilakukan simulasi dan pembahasan mengenai hasil yang didapatkan dari simulasi yang sudah dilakukan pada software simulink MATLAB seperti Gambar 6 pada plant Inverted Pendulum yang real.
Hasil simulasi digunakan untuk mengetahui kehandalan dan kerja sistem untuk mengetahui sejauh mana sistem dapat menuju ke titik kestabilan. Simulasi dilakukan dengan linierisasi plant Inverted Pendulum pada titik operasi antara
0 15
dengan 0 .0
Gambar 6 Simulink pengujian LQR terhadap model nonlinier
Hasil simulasi berdasarkan perancangan algoritma kontrol LQR dengan menentukan setpoint padainisialisasi sudut 0 ,±50 0, ±100, ±150 diberikan gangguan dengan amplitudo 10, periode 10 detik, phase delay 1 /det dengan konstanta torsi motor 0.1Nm.
3.2 Respon Sudut dan Kecepatan Sudut Pendulum dengan gangguan Sudut awal 00
0 1 2 3 4 5 6 7 8 9 10 -10 -5 0 5 10 waktu (detik) su d u t (D e ra ja d )
A-64 Gambar 7 Respon sudut
pendulum dengansudut awal 0 0
Hasil simulasi pada Gambar 7 dapat dilihat bahwa dari gangguan yang diberikan terjadi maksimal overshoot sebesar
9
.
92
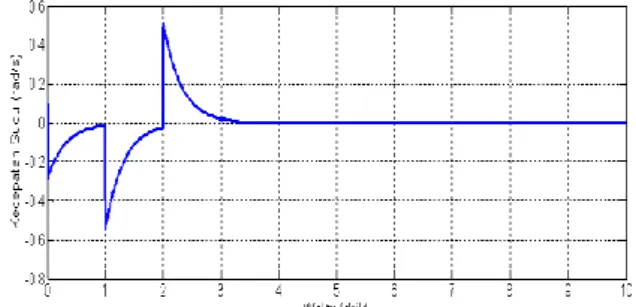
0, sedangkan maksimal undershoot sebesar 9.5240, dan berhasil kembali pada titik tengahnya dengan respon transient dengan settling time 3.2 detik.Gambar 8 Respon kecepatan sudut
pada sudut awal 0 0Dengan penyimpangan sudut yang terjadi setelah mendapat gangguan , maka yang terjadi pada kecepatan sudut seperti Gambar 8 dapat diamati bahwa terjadi kecepatan sudut sebesar maksimal 0.51 rad/s dan maksimal -0.52 rad/s. respon transient terjadi pada settling time 3.2 detik.
3.4 Respon Sudut dan Kecepata Sudut Pendulum dengan gangguan sudut awan ±50
Berdasarkan hasil simulasi pada Gambar 9 sebagai hasil uji respon pendulum terhadap gangguan, terlihat keseimbangan robot Inverted Pendulum untuk menuju ke titik
0
0 membutuhkan settling time sebesar 3.2 detik, setelah diberikan gangguan terjadi maksimal overshoot sebesar0
92
.
9
dan maksimal undershoot
9
.
52
0, dengan konstanta torsi motor 0.1 NmGambar 9 Respon sudut
pendulum dengan sudut awal ±50Untuk kecepatan sudut seperti Gambar 10 dapat diamati bahwa terjadi maksimal overshoot sebesar 0.52 rad/s dan maksimal undershoot pada 0.53 rad/s terlihat respon transient pada settling time 3.2 detik.
Gambar 10 Respon kecepatan sudut
pada sudut awal ±503.5 Respon Sudut dan Kecepatan Sudut Pendulum dengan gangguan Sudut awal ±100
Hasil simulasi pada Gambar 11 dapat dilihat bahwa dari gangguan yang diberikan terjadi maksimal overshoot sebesar 10.200, sedangkan maksimal undershoot sebesar
9
.
824
0. dan berhasil kembali pada titik tengahnya dengan settling time 3.2 detikGambar 11 Respon sudut
pendulum dengan sudut awal ±100Untuk kecepatan sudut seperti Gambar 12 dapat diamati bahwa pada kecepatan sudut terjadi maksimal overshoot sebesar 0.55 rad/s dan maksimal undershoot pada 0.58 rad/s pada settling time 3.2 detik.
Gambar 12 Respon kecepatan sudut
pada sudut awal ±1003.6 Respon Sudut dan Kecepatan Sudut Pendulum dengan gangguan Sudut awal ±150
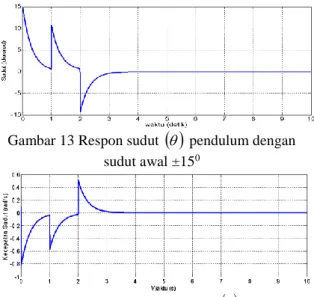
Berdasarkan hasil simulasi pada Gambar 13 sebagai hasil uji respon pendulum terhadap gangguan, dan Gambar 14 sebagai respon kecepatan sudut dapat jelaskan bahwa setelah diberikan gangguan terjadi maksimal overshoot sebesar 10,20 dan maksimal undershoot -9,80 terlihat respon transient sudut robot Inverted
A-65 Pendulum untuk menuju ke titik 00 membutuhkan settling time sebesar 3.2 detik, sedangkan untuk keceptan sudut yang terjadi sebesar maksimal overshoot 0.57 rad/s dan maksimal undershoot -0.58 rad/s perlu diketahui bahwa hasil simulasi seperti Gambar 13 dan 14 diberi nilai konstanta torsi motor 0.1 Nm.
Gambar 13 Respon sudut
pendulum dengan sudut awal ±150Gambar 14 Respon kecepatan sudut
pada sudut awal±1503.7 Hasil Implementasi Pengujian Kestabilan Robot Inverted Pendulum
Pada pengujian ini dilakukan secara real time dengan memberikan gangguan pada robot, adapun gangguan yang diberikan secara variatif, ini dilakukan dengan tujuan untuk melihat kehandalan sistem serta respon sudut setelah mengalami gangguan.
Gambar 15 Pengujian Kestabilan Robot
Dari Gambar 15 terlihat bahwa dengan variasi gangguan yang dilakuakan sebanyak 7 kali. Dari gangguan pertama terlihat robot membutuhkan waktu 4, detik untuk mencapai kestabilan. Kemudian pada gangguan ke dua osilasi terjadi selama 3 detik untuk mencapai kestabilan walaupun terjadi undershoot sebesar 32 derajad, dan robot dapat mencapai kestabilan selama 3.71 detik pada 3400 iterasi dengan waktu per-iterasi 10ms.
3. Kesimpulan dan Saran
Dari hasil pengujian dengan simulasi dan pengujian secara real time dapat dianalisa dengan
melihat transient dalam mencapai staeady state. Untuk pengujian pada implementasi rata-rata waktu yang dibutuhkan untuk mencapai steady state adalah 3.71 detik dan tidak jauh beda pada pengujian secara simulasi yaitu 3.2 detik. ini jelas bahwa kontroler Metode LQR dapat dan mampu menstabilkan dari berbagai ganggaun dan ketidakpastian system. adapun saran dari penulis untuk pengembangan penelitian selanjutnya, disarankan menggunakan metode kontrol Robust berbasis performansi
H
.Daftar Pustaka
Aris Triwiyatno, sumardi. “Desain Kontrol Inverted Pendulum Dengan Metode Robust Fuzzy“.Jurusan Teknik Elektro Universitas Diponegoro Transient, Vol2, No1, Maret 2013, ISSN.
Grasser, F., D’Arrigo, A., Colombi, S., Rufer, A.C. (2002). JOE: A Mobile, Inverted pendulum. IEEE Transactions on Industrial Electronics. 49(1):107-114
Kesama Purnam Wijaya, Putu, (2011). “Disain Fuzzy Sliding Mode Control Pada Robot Mobile Inverted Pendulum Beroda Dua”, Surabaya. Institut Teknologi Sepuluh Nopember.
Purwono Yusuf, “Perancangan dan Implementasi Embedded PID kontroler menggunakan mikrokontroler untuk pengaturan kestabilan robot Segway Mini, Institut Teknologi Sepuluh Nopember, (2009).
Rasool Kahani,”Control of Two-Wheels Inverted Pendulum Using Parallel Distributed Compensation and Fuzzy Linear Quadratic Regulator”3rd IEEE International Conference on Computer Modeling and Simulation (ICCMS 2011).
Shiroma, N, Matsumoto, O, Kajita, S. & Tani, K, 1996 ‘Cooperative Behaviour of a Wheeled Inverted pendulum for Object Transportation’, Proceedings of the 1996 IEEE/RSJ International Conference on Intelligent Robots and Systems '96, IROS 96, Volume: 2 , 4-8 Nov. 1996 Page(s): 396 -401 vol.
Tri Hendrawan Budianto, “Perancangan Kontroler Fuzzy Prediktif Robot Model Segway” Institut Teknologi Sepuluh Nopember Surabaya, (2012).