ISBN: 978-602-70570-5-0
http://eproceeding.itp.ac.id/index.php/pimimd2017
© 20XX ITP Press. All rights reserved. DOI 10.21063/PIMIMD4.2017.XX-XX
Kendali Temperatur Pada Rotary Kiln
Yuda Bakti Zainal*, Susanto Sambasri, Handoko Rusiana Iskandar
Jurusan Teknik Elektro, Universitas Jenderal Achmad Yani. Jl. Ters. Jend. Sudirman PO BOX 148, Cimahi, Indonesia
*Korespondensi dialamatkan melalui email [email protected]
Abstrak
Rotary kiln adalah perangkat pyroprocessing yang digunakan untuk memanaskan bahan pada suhu tinggi atau
kalsinasi dalam suatu proses berkelanjutan. Temperatur ini berkisar dari 1000 - 1350°C, dengan bahan bakar batu bara. Kendali temperatur pada rotary kiln menggunakan sistem orde 1, sehingga kenaikan temperatur memakan waktu yang cukup lama untuk mencapai steady state, oleh karena itu perlu ditambahkan kompensator atau pengendali. Sistem ini akan bekerja dengan optimal apabila digunakan sebuah pengendali atau kompensator yang dapat memperbaiki kinerja sistem rotary kiln hingga mendekati ideal dengan menggunakan karakteristik dari pengendali digital. Pendekatan pengendali digital yang dirancang harus mampu mencapai prosentase simpangan puncak kurang dari 5%. Metoda yang digunakan pada penelitian ini adalah metoda deskriptif yang memberikan penjelasan secara komprehensif semua informasi yang berkaitan dengan obyek penelitian dan metoda eksperimental dengan melakukan serangkaian pengujian yang dilakukan pada sistem pengendalian temperatur sistem rotary kiln yang ada di Laboratorium tekMIRA. Makalah ini membahas perancangan sistem kendali, simulasi dan implementasinya. Kompensator diancang secara digital sehingga memenuhi spesifikasi sistem yang telah ditetapkan dengan prosentase simpangan puncak < 5%.
Kata kunci: Kompensator, rotary kiln, temperatur
1. Pendahuluan
Proses reduksi bijih nikel dan besi mengacu pada diagram alir pembuatan spons ferro nickel dalam tungku putar skala pilot plant (160 kg/jam) yang telah berhasil dikembangkan Tekmira di Citatah Padalarang. Proses reduksi bijih nikel menjadi produk nugget Ferro Nickel dapat dijelaskan sebagai berikut :
Bijih nikel laterit dibuat pellet komposit dengan menggunakan campuran antrasit, fluks dan binder.
Pellet komposit dikeringkan dalam ruang panas di mana panas berasal dari gas buang dari rotary kiln.
Pellet kering kemudian direduksi dalam
rotary kiln selama 4 jam dengan suhu
1350oC.
Rotary kiln dilengkapi dengan scoope
feeder untuk mengumpankan batubara ke
dalam rotary kiln yang berputar. Posisi
scoope feeder 25% dari titik pengeluaran
produk. Reduksi berlangsung pada kondisi semi solid di mana Fe-Ni nugget terperangkap dalam slag yang kental.
Pemisahan antara slag dengan produk
nugget Fe-Ni menggunakan magnetic separator
Rotary kiln juga dilengkapi dengan system wet scrubber untuk menangkap debu, coal-oil burner, water pool-rake withdraw system, closes circuit spiral classifier-ball mill, magnetic separator dan control system[1][2].
Sistem kendali motor spiral clasifier untuk feeding batubara pada rotary kiln dalam proses pembuatan nugget ferronickle, bertujuan agar
nugget ferronickle dalam rotary kiln tersebut
tidak hancur tetapi tetap berbentuk seperti buah jengkol.
Penelitian ini difokuskan khusus pada pengendalian temperatur di rotary kiln, karena pada proses pembuatan nugget ferronickle sangat bergantung pada temperatur tinggi yang sudah dirancang sekitar 1350oC. Sistem spiral
clasifier yang akan dikendalikan dapat dilihat
pada Gambar 1, dimana pada kondisi ini berlaku spesifikasi sistem rancangan yaitu mendapatkan simpangan puncak, untuk masukkan undak < 5%. Sehingga perlu dirancang pengendali berorde 1 agar diperoleh response keluaran temperatur yang lebih cepat dan overshoot mencapai < 5%, jika pengendali orde 1 tidak dapat memenuhi kriteria desain, maka akan diujicoba menggunakan pengendali berorde 2[3][4].
Cakupan bahasan dalam makalah ini antara lain adalah merancang pengendali berorde satu atau dua agar diperoleh response keluaran sistem yang memenuhi kriteria desain, jika dengan pengendali berorde 1 sudah memenuhi kriteria desain, maka tidak perlu lagi diujicoba menggunakan pengendali berorde 2 karena penambahan orde tersebut akan memperlambat kinerja sistem. Untuk itu untuk perlu dirancang sistem pengendali digital yang mampu mengendalikan temperatur sistem rotary kiln dengan mengendalikan motor spiral clasifier.
2. Metoda dan Bahan
Untuk merancang sebuah sistem diperlukan kriteria perancangan. Adapun kriteria perancangan sistem spiral clasifier untuk pengendali temperatur pada rotary kiln adalah prosentase simpangan puncak <5%, dimana pengendali ini kemudian diterapkan sesuai spesifikasi sistem menggunakan kompensator atau pengendali Phase Lag, Phase Lead dan pengendali Lag Lead Digital[5].
A. Perancangan Waktu dan Perioda
Sampling
Dari model analog sistem, sistem fungsi alih sistem nya adalah[6]
1
21
.
.
152
)
(
6 . 9
s
e
K
s
Gp
s (1)Karena konstanta waktu adalah kebalikan dari magnitude pole ril dalam bidang-s yaitu pada s = -1/21, maka konstanta waktunya adalah :
det 0476 . 0 21 1
(2)Jadi untuk pilihan konservatif, perioda sampling yang dipilih adalah sebesar
00476
.
0
1
.
0
T
det (3)Selain itu akan diuji perioda sampling dengan T = 0.00952 detik (1/5 ) dan T = 0.01904 detik (1/2.5 ).
B. Deskripsi Sistem Diskrit
Setelah mengetahui penguatan K, yaitu sebesar 1/76 maka selanjutnya kita bisa menyatakan, persamaan fungsi alih lup terbuka diskrit secara umum, yang besarnya tergantung pada perioda sampling T, sebagai berikut
1
21
152
1
)
76
(
1
)
(
6 . 9s
e
z
z
z
G
s (4) Hasil simulasi respon transien sistem untuk menentukan prosentase simpangan puncak dangalat keadaan tunak menggunakan MATLAB dapat dilihat dalam gambar 1, 2 dan 3.
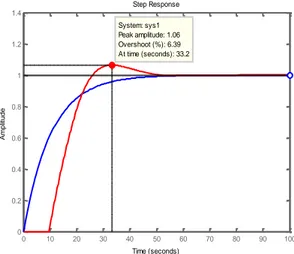
Gambar 1. Respon transient sistem kontinyu dengan overshoot 6.39%
Gambar 2. Respon transient sistem kontinyu dan sistem diskrit T = 0.01904 detik
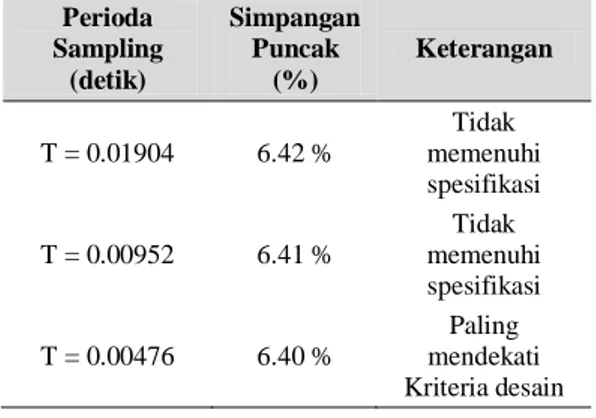
Gambar 3. Respon transient sistem dengan T = 0.00952 dan T = 0.00476 detik. Simpangan puncak k dengan masing – masing T di atas ditunjukkan dalam tabel 1.
Step Response Time (seconds) A m p lit u d e 0 10 20 30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1 1.2 1.4 System: sys1 Peak amplitude: 1.06 Overshoot (%): 6.39 At time (seconds): 33.2 Step Response Time (seconds) A m p li tu d e Step Response Time (seconds) A m p li tu d e 0 10 20 30 40 50 60 0 0.5 1 1.5 System: sys3 Peak amplitude: 1.06 Overshoot (%): 6.39 At time (seconds): 33.2 0 10 20 30 40 50 60 70 0 0.5 1 1.5 System: sys4 Peak amplitude: 1.06 Overshoot (%): 6.42 At time (seconds): 33.2 Sistem Kontinyu T=0.01904 detik Step Response Time (seconds) A m p lit u d e Step Response Time (seconds) A m p lit u d e 0 10 20 30 40 50 60 70 0 0.5 1 1.5 System: sys4 Peak amplitude: 1.06 Overshoot (%): 6.41 At time (seconds): 33.2 0 10 20 30 40 50 60 70 0 0.5 1 1.5 System: sys5 Peak amplitude: 1.06 Overshoot (%): 6.4 At time (seconds): 33.2 T=0.00952 detik T=0.00476 detik
Tabel 1. Kriteria spesifikasi sampling T detik Perioda Sampling (detik) Simpangan Puncak (%) Keterangan T = 0.01904 6.42 % Tidak memenuhi spesifikasi T = 0.00952 6.41 % Tidak memenuhi spesifikasi T = 0.00476 6.40 % Paling mendekati Kriteria desain
3. Hasil dan Diskusi
Sebelum masuk ke perancangan
kompensator, sebaiknya kita uji terlebih dahulu sistem lup tertutup dengan mencoba beberapa nilai untuk variable penguatan K dengan T = 0.00476 detik.
C. Pengujian Respons Transient
Gambar 4 merupakan hasil uji respon transient pada sistem dengan nilai K = 1/80 menunjukkan bahwa sistem sudah tidak sesuai dengan kriteria desain yang diinginkan. Pengujian lain yang digunakan adalah menambah variabel K, dimana jika nilai K diperkecil dengan K = 1/85.
Gambar 5. Menunjukkan bahwa walaupun nilai overshoot mengecil dibawah 5% tetapi nilai set pointnya semakin mengecil dibawah 1 atau sekitar 0.95, sehingga untuk nilai K = 1/85 tetap diluar kriteria desain.
D. Kompensator Phase-Lag Diskrit
Dalam merancang kompensator phase lag diskrit dapat ditempuh dengan beberapa langkah kerja, antara lain adalah menentukan besar frekuensi
w1 dimana sudut phase) (j w
G
adalah kira-kira (-180º +
m + 5º).Phase margin dari sistem terkompensasi
kira-kira akan berada pada frekuensi ini, pilih dan gunakan persamaan (5).
1 0 0.1 w
w
(5) Kemudian pada
w1 kita inginkan1
)
(
)
(
j
w1G
j
w1
D
. Besar penguatankompensator pada frekuensi tinggi adalah 0
0 wp/ w
a
(dimanaa
0 adalah penguatan DC kompensator), yang selanjutnya berlaku persamaan (6). ) ( 1 . 0 1 0 1 w w wp j G a
(6)Dengan memenuhi persyaratan di atas, perancangan sistem telah lengkap, jika diketahui penguatan DC kompensator
a
0, letak pole, dan letak zero. Kemudian Sebelum memulai perancangan sistem terlebih dahulu harus ditentukan phase margin (
m), agar dapat,Gambar 4. Respon transient sistem diskrit pada K = 1/80 dan T = 0.00476 detik.
Gambar 5. Respon transient sistem diskrit pada K = 1/85 dan T = 0.00476 detik. diperoleh prosentase simpangan puncak (%) sesuai dengan spesifikasi sistem yang ditentukan, adapun cara yang dipakai adalah sama dengan mencari prosentase simpangan puncak pada bagian I di atas. Pilih prosentase simpangan puncak < 5 %, misalnya 4.5 %, Prosentase simpangan puncak adalah.
(Mp) = 1 2
4
.
5
%
e
(7) Step Response Time (seconds) A m p lit u d e 0 10 20 30 40 50 60 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 System: sys4 Peak amplitude: 0.981 Overshoot (%): 3.95 At time (seconds): 35.6 K = 1/857025 . 0 974383176 . 1 974383176 . 0 974383176 . 0 1 101 . 3 1 101 . 3 045 . 0 ln 1 045 . 0 2 2 2 2 1 2 e
Setelah mendapatkan nilai , maka phase
margin dapat dicari menggunakan persamaan
(8) berikut.
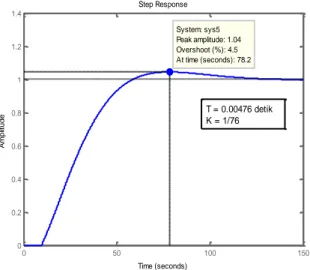
Gambar 6. Respon transient sistem diskrit pada K = 1/76 dan T = 0.00476 detik. Tabel 2. Hasil uji sistem terkompensasi Phase
Lag Jenis Kompensato r Simpanga n Puncak Keterangan Phase-Lag 4.5 % Setpoint temperatur 1350°C.
2 2 12
1
4
2
tan
m (8) 66 ) 7025 . 0 ( 2 1 ) 7025 . 0 ( 4 ) 7025 . 0 ( 2 tan 2 2 1 m Perancangan sistem kendali ekstruder dimulai dengan menentukan frekuensi
w1 , dengan menggunakan phase margin (
m ) terpilih, sebagai berikut:diinginkan yang in m phase m m arg 109 5 66 180 5 180 (9)
Dengan menggunakan kompensator Phase
Lag, diperoleh nilai overshoot di bawah 5%
atau tepatnya 1.33% dan hasil ini tidak mempengaruhi nilai setpoint yang sudah ditetapkan atau setara dengan nilai temperatur 1350°C.
4. Simpulan
Suatu perancangan kendali temperatur pada sistem rotary kiln telah diperoleh dengan kompensator Phase Lag dipilih untuk memenuhi spesifikasi perancangan dimana prosentase simpangan puncaknya < 5% atau tepatnya 4.5%, nilai overshoot ini diperoleh pada kondisi penguatan K = 1/76 dan waktu T = 0.00476 detik, dan Prosentase simpangan puncak, memenuhi spesifikasi yang telah ditetapkan dengan tetap mempertahankan setpoint di temperatur 1350°C. dengan nilai
phase margin
m sebesar 66°. Nilai phasemargin sebesar 66° tersebut, menandakan bahwa sistem ini stabil.
Ucapan Terima Kasih
Penulis berterima kasih kepada panitia Seminar Nasional PIMIMD-4 Intitut Teknologi
Padang, yang telah membantu
mempublikasikan tulisan hasil penelitian ini, Laboratorium tekMira Bandung, dan tim yang terlibat dalam proses pengujian dalam penelitian ini.
Referensi
[1] A. Baikadi, V. Runkana, and S.
Subramanian, “ScienceDirect
Operability Operability Analysis Analysis of of Direct Direct Reduction Reduction of of Iron Coal in an Industrial Iron Ore by Coal in an Industrial Rotary Kiln,” IFAC-PapersOnLine, vol. 49, no. 1, pp. 468–473, 2016.
[2] Puslitbang Tekmira, “Puslitbang Tekmira, kajian temperatur pada rotary kiln untuk pembuatan spons ferronickle.” pp. 1–18, 2015.
[3] BPPT, “Pembuatan nugget ferronickle sangat bergantung pada besar dan
Step Response Time (seconds) A m p lit u d e 0 50 100 150 0 0.2 0.4 0.6 0.8 1 1.2 1.4 System: sys5 Peak amplitude: 1.04 Overshoot (%): 4.5 At time (seconds): 78.2 T = 0.00476 detik K = 1/76
konsistensi temperatur pada rotary kiln 1350˚C,” 2015.
[4] A. A. Boateng, Rotary Kilns: Transport
Phenomena and Transport Processes.
Elsevier Science, 2015.
[5] A. Navarro, I. Cañadas, and J. Rodríguez, “Thermal Treatment of Mercury Mine Wastes Using a Rotary Solar Kiln,”
Minerals, vol. 4, pp. 37–51, 2014.
[6] H. Gu, P. He, S. Mei, and J. Xie, “Simulation on Different Proportions of Coal and Natural Gas Co-combustion in a Rotary Lime Kiln,” Int. J. Intelegent
Syst. Appl., vol. 6, no. June, pp. 17–24,