10
BAB II
LANDASAN TEORI
Perancangan robot crane melalui beberapa tahap, dimulai dari perancangan hardware berupa mekanik robot dan interface kemudian baru dilakukan perancangan software aplikasi desktop dan script mikrokontroler Arduino.
USB port Arduino&Relay Motor DC&Robot Crane
Elektronika Dasar 2.1
Kabel 2.1.1
Kabel merupakan salah satu dari sekian banyak komponen elektronika yang paling sederhana, karena kabel dengan sifatnya yang konduktor hanya berfungsi sebagai penghantar listrik. Pada rancangan pengendali Robot Crane ini, kabel digunakan sebagai : pengawatan PCB, penghubung antara rangkaian interface dan motor langkah, penghubung antara Arduino Board dan rangkaian interface.
Gambar 2.1 Kabel Serabut PCB (Printed Circuit Board)
2.1.2
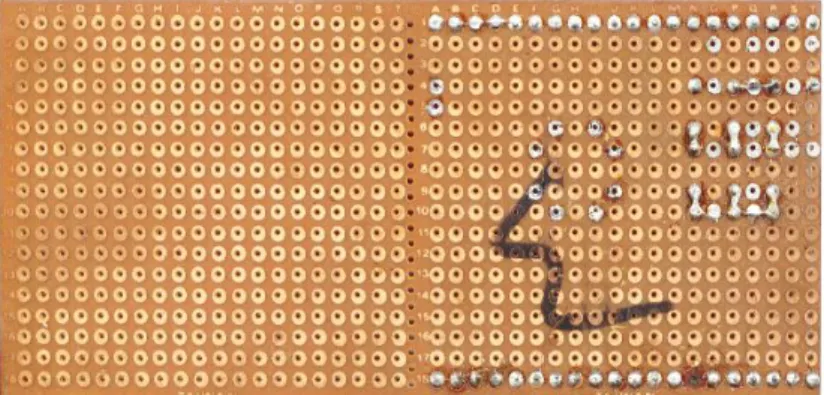
PCB (Printed Circuit Board), merupakan sebuah papan dimana komponen - komponen elektronika akan dirangkai atau disolder, dimana papan tersebut telah tercetak jalur - jalur konduktor yang membentuk sirkuit yang diinginkan perancang elektronika tersebut.
PCB terbagi menjadi dua bagian, yaitu: PCB Polos, yang merupakan PCB yang belum tercetak jalur sirkuit, sehingga pada sisi konduktor pada PCB tersebut hanya terdapat lempengan konduktor yang siap dicetak dengan bantuan spidol anti air atau sejenisnya untuk menutupi jalur sirkuit yang akan dibuat, dan cairan fericlorida yang berfungsi untuk melunturkan tembaga yang tidak tertutup oleh sepidol anti air atau sejenisnya.
Dan ada juga PCB Bolong, yaitu PCB yang telah dilubangi, sehingga komponen elektronika dapat langsung dipasang. Untuk membuat jalur pada PCB Bolong ini digunakan bantuan kawat, sehingga tidak periu merancang jalur sirkuit.
PCB bolong dapat digunakan pada rangkaian elektronika yang memerlukan jalur - jalur sirkuit yang sederhana, sehingga PCB ini cocok untuk pembuatan rangkaian interface Pengendali Robot Crane.
Gambar 2.2 PCB (Printed Circuit Board) Bolong Dioda
2.1.3
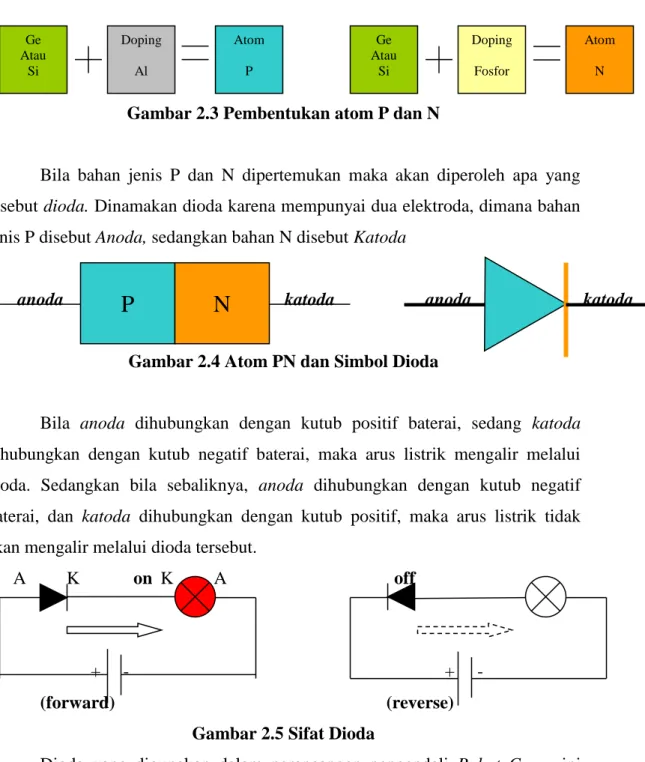
Dalam keadaan sebenarnya, germanium dan silikon merupakan benda isolator. Kemudian oleh pabrik germanium dan silikon, masing - masing diberi
"kotoran" yang disebut dengan doping. Bila germanium atau silikon diberi
kotoran alumunium, maka akan diperoleh bahan semi konduktor jenis P. Sebab bahan ini sekarang menjadi tidak netral lagi, karena germanium atau silikon sekarang menjadi kekurangan elektron, sehingga bersifat positif. Sedangkan bila germanium atau silikon diberi kotoran fosfor, maka akan diperoleh bahan semi konduktor jenis N, sebab bahan ini kelebihan elektron, sehingga bersifat negatif.
Gambar 2.3 Pembentukan atom P dan N
Bila bahan jenis P dan N dipertemukan maka akan diperoleh apa yang disebut dioda. Dinamakan dioda karena mempunyai dua elektroda, dimana bahan jenis P disebut Anoda, sedangkan bahan N disebut Katoda
anoda katoda anoda katoda
Gambar 2.4 Atom PN dan Simbol Dioda
Bila anoda dihubungkan dengan kutub positif baterai, sedang katoda dihubungkan dengan kutub negatif baterai, maka arus listrik mengalir melalui dioda. Sedangkan bila sebaliknya, anoda dihubungkan dengan kutub negatif baterai, dan katoda dihubungkan dengan kutub positif, maka arus listrik tidak akan mengalir melalui dioda tersebut.
A K on K A off
+ - + -
(forward) (reverse) Gambar 2.5 Sifat Dioda
Dioda yang digunakan dalam perancangan pengendali Robot Crane ini adalah dioda tipe 1N4148 yang terbuat dari silicon yang dapat mengalirkan arus
Atom P
Ge Atau
Si
Doping Fosfor
Atom N Ge
Atau Si
Doping Al
P N
listrik sebesar 12V secara searah, dan dioda cahaya atau LED yang berfungsi sebagai indikator motor apa yang sedang digerakkan.
Gambar 2.6. Dioda 1N4148 dan LED
Pada dioda bertegangan maju, elektron bebas melintasi persambungan dan jatuh ke dalam lubang (hole). Pada saat elektron ini jatuh di tingkat energi yang lebih tinggi ke tingkat energi yang lebih rendah, ia memancarkan energi. Pada LED pancaran energi ini dipancarkan sebagai cahaya.
Relay 2.1.4
Relay adalah suatu sistem yang terdiri dari saklar dan penggerak saklar.
Nama relay tergantung dari energi penggerak saklar yang terdapat dalam relay tersebut. Sehingga ada beberapa jenis relay, diantaranya adalah relay panas dan relay magnetik.
Dimana untuk relay panas saklarnya akan bergerak bila ada suhu tertentu tergantung dari tipe relay tresebut. Sedangkan untuk relay magnetik, saklar akan bergerak bila pada kumparan kawat dialiri arus listrik sehingga menghasilkan elektromagnetik yang menggerakkan saklar.
Jenis - jenis yang terdapat dalam sistem relay terdiri dari 3 jenis yaitu, saklar normal ON, saklar normal OFF dan saklar normal ON/OFF. Hal tersebut menyatakan jika kondisi relay dalam keadaan normal atau tidak difungsikan saklar berada pada kondisi ON atau OFF. Ada beberapa jenis susunan kontak relay, yaitu:
a) Normally Open Relay, akan menutup bila dialiri arus listrik.
b) Normally Close Relay, akan membuka bila dialiri arus listrik
c) Normally Over Relay, akan menutup dengan kutub lain (bukan normalnya) bila dialiri arus listrik, bila tidak dialiri arus listrik maka akan menutup dengan kutub normalnya.
(a) (b)
Gambar 2.7. (a) Simbol Normally Over Relay (b) Bentuk Relay
Pada rancangan pengendali Robot Crane ini, relay digunakan sebagai pengontrol motor DC agar putaran motor tidak bersamaan.
Motor DC 2.1.5
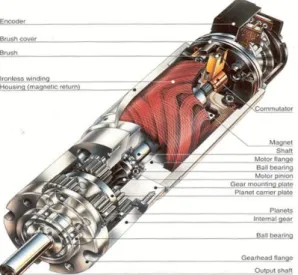
Dalam motor pengerak listrik dikenal dua macam motor penggerak, yaitu motor penggerak DC/AC dan motor langkah. Motor DC/AC terdiri dari dua buah koil sebagai stator, dan inti magnet yang bisa berputar di sumbunya sebagai motor.
Karenanya putaran motor DC/AC ini merupakan putaran kontinyu. Gambar 2.8 dan 2.9 menunjukkan motor DC yang telah dilengkapi dengan gearbox dimana fungsi gearbox untuk memberikan torsi besar pada putaran motor DC.
Gambar 2.8 Motor DC internal gearbox
http://www.beechservices.com/ref_breakdownofdcmotor.asp
Gambar 2.9 Motor DC external gearbox
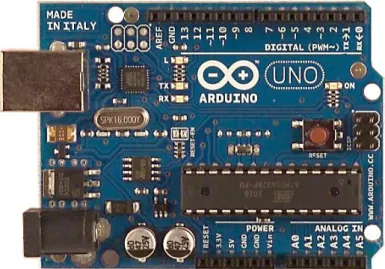
Arduino UNO 2.2
Arduino adalah sebuah mikrokontroler terintegrasi yang terdiri dari prosesor Atmel AVR, Input/Output, converter USB/Serial, boot loader dan perangkat elektronik lainya yang diubungkang pada board PCB. Arduino dirancang untuk tujuan edukasi, simulasi bahkan proyek-proyek multi-disiplin lain dengan berbagai kemudahan dan fitur yang ditawarkan.
Perangkat lunak Arduino menggunakan bahasa yang berbasis syntax dan library yang mirip dengan bahasa pemrograman C++ dengan beberapa penyederhanaan dan modifikasi. Program Arduio sudah mendukung IDE
(Integrated Development Environment) dimana kebutuhan pemrograman dijadikan satu tempat; mulai dari text editor, compiler, sistem help.
Perangkat keras dan lunak Arduino merupakan open source. Artinya Arduino terbuka untuk siapapun baik individu maupun korporasi untuk memodifikasi perangkat keras maupun lunak nya. Rancangan atau skema diagram tersedia bagi mereka yag ingin merakit Arduino secara manual.
Arduino board menggunakan sebagian besar pin I/O mikrokontroler untuk digunakan oleh sirkuit lain. Diecimila yang sekarang digantikan oleh
Duemilanove misalnya, menyediakan 14 digital I / O pin, enam pin dapat
menghasilkan sinyal PWM, dan enam input analog. Pin ini berada di atas papan, melalui pin female header 0,1 inci. Beberapa plug-in aplikasi "shield" yang juga tersedia secara terpisah. Beberapa komparasi Arduino dapat dilihat pada gambar 2.10. Dan contoh Arduino UNO dapat dilihat pada gambar 2.11
Gambar 2.10 Komparasi Arduino
Gambar 2.11 Arduino UNO
Kecerdasan Buatan 2.3
Kecederdasan Buatan adalah suatu studi khusus dimana tujuannya adalah membuat komputer berpikir dan bertindak seperti manusia. Kecerdasan buatan mempelajari bagaimana membuat komputer melakukan sesuatu pada suatu kejadian/peristiwa sebagaimana orang melakukannya dengan baik.
Banyak implementasi kecerdasan dalam bidang komputer, misalnya Decision Support System (Sistem Pendukung Keputusan), Natural Language (Bahasa Alami), Neural Network (Jaringan Saraf), Expert System (Sistem Pakar), dan lain - lain. Adapun implementasi Kecerdasan Buatan lainnya adalah Robotik, yang akan dibahas pada sub-bab berikutnya.
Kecerdasan Buatan yang akan diaplikasikan pada sistem pengendali Robot Crane adalah bagaimana Robot Crane dapat belajar gerakan-gerakan yang diperintahkan oleh user, sehingga Robot Crane tersebut dapat mengulang kembali gerakan-gerakan yang telah diajarkan oleh user.
Kecerdasan buatan tersebut menggunakan metode Teach Pendant dan Robotic Control Language, yakni dengan metode setiap gerakan yang dilakukan oleh robot, gerakan - gerakan tersebut akan dicatat di suatu tabel. Sehingga pada saat robot diberikan perintah untuk mengulangi gerakan, maka sistem akan membaca kembali catatan-catatan gerakan yang telah tersimpan dalam tabel.
Robotik 2.4
Berawal dari khayalan dan imajinasi sebuah novel atau cerita anak - anak, teknologi robot dikembangkan. Seperti kita ketahui kini, robot telah banyak dibuat, disimulasikan dan bahkan telah diterapkan. Tidak aneh lagi bahwa telah banyak robot yang dikomersilkan untuk dijual di kalangan masyarakat luas.
Gambar 2.12. Robot khayalan di sebuah Film
Gambar 2.13. Robot Asimo buatan Jepang
Ini bukti bahwa teknologi robot telah semakin canggih. Upaya manusia untuk menciptakan mesin mendekati kecerdasan makhluk hidup itu terus dipikirkan dan dirisetkan. Lengan robot untuk kegiatan nuklir telah digunakan, mesin robot pada industri elektronik telah banyak membantu, mekanisme robot dalam dunia kesehatan telah digunakan. Ini adalah sebagian contoh robot yang telah ada di masyarakat.
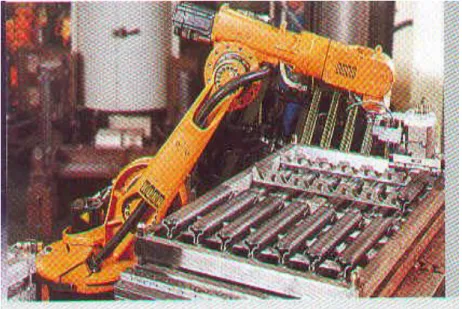
Gambar 2.14. Robot Industri
Robot pada awalnya hanyalah sebuah mesin yang dibuat untuk dapat digerakkan oleh manusia, kemudian berkembang dengan pergerakan manual yang dibantu oleh program komputer, seperti Robot Crane yang dapat mengambil dan menaruh barang di tempat yang ditentukan. Robot tidak hanya terpaku pada program, namun robot juga bergerak berdasarkan mekanisme mesin. Yang berarti bahwa ilmu mekanik juga diterapkan bersamaan ilmu komputer.
Robotik adalah ilmu yang mematerikan kecerdasan terhadap energi, artinya pengendalian secara cerdas terhadap gerakan yang terkoordinasi secara nyata.
Robot berasal dari bahasa shekoslovakia 'robota' yang artinya tenaga kerja.
Robot adalah hubungan perangkat lunak (software) dengan perangkat keras (hardware), di mana perangkat lunak tersebut merupakan kecerdasan yang dibuat oleh programmer yang berada dibalik mesin itu yang mengendalikan seluruh gerak-gerik mesin tersebut dan dari kecerdasan inilah yang membedakan sebuah robot dengan bentuk-bentuk otomatis lainnya.
Gambar 2.15. Tangan Robot Pemindah Benda
Robot diharapkan dapat melakukan seperti yang dilakukan oleh manusia, seperti: melihat, mendengar, meraba, mengangkat benda, dan lain sebagainya.
Namun pada pengembangan pengendali Robot Crane ini, hanya dapat mengangkat benda, memindahkan benda, dan meletakkan benda tersebut di tempat yang telah ditentukan.
Terdapat 3 aturan asimov pada robotic :
1. Tidak boleh melukai manusia.
2. Harus patuh terhadap perintah manusia, kecuali yang bertentangan dengan aturan no.1.
3. Harus mempertahankan diri, kecuali bertentangan dengan aturan no. 1 dan 2.
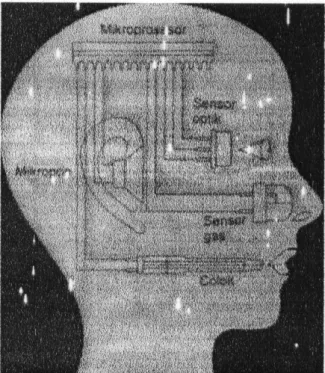
Gambar 2.16. llustrasi Sensor Buatan
Terdapat dua cara dalam menggerakan / mengajarkan robot :
Teach Pendant 2.4.1
Teach Pendant merupakan metode yang paling banyak digunakan untuk mengajarkan robot bergerak. Bentuk dan fungsi teach pendant mirip dengan remote kontrol mobil-mobilan. Teach pendant digunakan untuk mengontrol setiap titik dari Robot Crane. Misalkan kita ingin agar robot menutup gripe-nya, maka yang perlu kita iakukan adalah menekan tombol yang telah difungsikan untuk menutup gripe Robot Crane tersebut. Walaupun setiap pembuat robot tidak akan sama persis bentuk teach pendant-nya, namun prinsip kerja semua teach pendant adalah sama. Teach pendant tidak terhubung secara langsung ke robot, tetapi terhubung secara keseluruhan ke komputer kendali Robot Crane.
Jika diinginkan mengajari robot sebuah proses dapat digunakan teach pendant untuk membimbing robot ke rangkaian pergerakan yang membentuk proses tersebut. Setiap pergerakan robot akan direkam oleh komputer, sehingga komputer dapat melanjutkan pergerakan yang telah terekam secara otomatis.
Bahasa Kendali Robotik (Robotic Control Language) 2.4.2
Bahasa Kendali Robotik (Robotic Control Language) adalah bahasa komputer yang secara khusus dirancang untuk mengendalikan sebuah robot.
Terkadang dalam Robotic Control Language terdapat tambahan perintah-perintah baru, seperti kendali perulangan (Loop Control) dan statemen kondisional (conditional statement). Sebuah robot dikendalikan oleh bahasa yang berisi sebuah basis data yang telah tersedia (built in database), di mana digunakan untuk menyimpan informasi tentang setiap gerakan yang akan dilakukan oleh robot.
Dalam dunia robotik ada suatu teknologi Autonomous Robot. Autonomous robot ini merupakan robot otomatis yang dapat beroperasi dalam lingkungan tak terkendali pada dunia manusia, maka robot ini membutuhkan berbagai keahlian buatan. Misalkan saja diperlukan sensor agar robot dapat melihat, mendengar, meraba, dan lain sebagainya.
Dalam hal ini terdapat rancangan Autonomous Robot yang terdiri dari beberapa bagian , yaitu:
a) Perception, Perception (persepsi) meliputi interpretasi penglihatan (sight), suara (sound), rasa (smell) dan meraba (touch).
b) Cognition, Cognition merupakan langkah tindak lanjut dari langkah persepsi.
Robot melakukan pengertian dari hasil persepsi.
c) Action, merupakan langkah tindak lanjut setelah persepsi telah dimengerti oleh robot. Action (aksi) meliputi kemampuan mengendalikan / navigasi alam atau dunia dan memanipulasi objek.
d) The Physical World, The Physical World merupakan dunia manusia, objek operasi yang akan berhubungan dengan robot.
Gambar 2.17. Rancangan Robot Otomatis
Pesawat Sederhana 2.5
Pesawat adalah alat yang memudahkan kita untuk melakukan usaha. Ada dua jenis pesawat, yaitu pesawat sederhana dan pesawat rumit. Contoh pesawat sederhana adalah tuas, katrol, dan bidang miring. Pesawat rumit adalah pesawat yang terdiri dari susunan beberapa pesawat sederhana.
2.5.1 Tuas
Tuas adalah alat yang dapat digunakan untuk mengangkat beban dengan gaya yang lebih kecil. Tuas disebut juga penjungkit. Pada lengan robot terdapat tuas yang berfungsi mengangkat beban suatu benda.
Gambar 2.18. Tuas memudahkan untuk mengangkat beban
2.5.2 Katrol
Katrol adalah pesawat sederhana yang dapat mengubah arah gaya sehingga gaya tarik yang arahnya ke bawah menjadi gaya angkat yang arahnya ke atas.
Katrol ada 3 jenis, yaitu katrol tetap, katrol bergerak dan sistem katrol.
Pada katrol tetap, titik tumpu terletak pada titik O. Titik kuasa di titik A, sedangkan titik beban pada titik B. Dengan demikian, katrol juga memiliki lengan kuasa (Ik) sepanjang BO dan lengan beban (lb) sepanjang AO. Pada katrol tetap, berlaku lb = lk. Jadi persamaan katrol tetap adalah :
F = w.lb/lk F = w.lb/lb F = w
Keuntungan mekanik katrol tetap ialah:
Beban / kuasa = w / F = 1
Gambar 2.19. Katrol Tetap
Pada katrol bergerak, letak titik tumpu berada pada titik B, kuasa di titik A dan beban di titik O. Adapun lengan beban terletak pada OA, sedangkan lengan kuasa terletak pada BA. Pada katrol bergerak berlaku lk=2lb. Dengan demikian, persamaan katrol bergerak adalah:
F = w.lb/lk F = w.lb/2.Ib F = ½ w
Keuntungan mekanik katrol tetap ialah:
Beban /kuasa = w/F = 2
Gambar 2.20. Katrol Bergerak
Sistem katrol merupakan suatu susunan dari beberapa katrol tetap dan katrol bergerak. Gaya yang dibutuhkan untuk mengangkat suatu benda adalah hasil perkalian dari hasil gaya masing masing katrol. Karena gaya pada katrol tetap sama dengan beban maka katrol tetap dapat diabaikan. Jika dimisalkan ada 3 buah katrol tetap dan 3 buah katrol bergerak maka diperoleh persamaan sebagai berikut :
F = Fb1 X Fb2 X Fb3 X Ft1 X Ft2 X Ft3 F = ( ½ X ½ X ½ X 1 X 1 X 1 )w
F = ( ½ X ½ X ½ X 1 )w F = 1/8 w
Keuntungan mekanik sistem katrol diatas ialah:
Beban/kuasa = w/F = 8
Gambar 2.21. Sistem Katrol