1
Implementasi Filter Adaptif Least Mean Square
Pada TMS320C6713
Afifi Amiulloh, Arifin,Tribudi Santoso Politeknik Elektronika Negeri Surabaya Institut Teknologi Sepuluh Nopember (ITS) Surabaya
e-mail: [email protected]
Abstrak
Filter adaptif banyak digunakan untuk mengatasi
sinyal derau pada sinusoidal yang nilainya berubah-ubah. Algoritma adaptif filter yang digunakan pada paper ini adalah Least Mean Square (LMS). Sinyal sinusoidal ditambahkan dengan noise sebagai masukan dari adaptif filter,system berjalan dengan merubah beberapa parameter (laju konvergensi ,orde filter, delay)
Dari penelitian ini diperoleh hasil bahwa menurunkan laju konvergensi dapat meningkatkan nilai SNR sebesar 0,98659, dan nilai MSE turun secara konstan saat laju konvergensi diturunkan dari 9E-9
sampai dengan 3E-13, dimana nilai selisih
penurunannya hingga mencapai 0,64929.
Kata kunci: Adaptif filter, Least Mean Square, TMS320C6713
1. .Pendahuluan
Penelitian Renaldi Bonadr, Sumardi dan Sudjadi
yang berjudul “Perbandingan Kinerja Algoritma LMS
dan Algoritma Genetik untuk Filter adaptif Penghilang Noise”[1] mendasari pemilihan jenis algoritma dari
implementasi adaptif filter ini. Algoritma Least Mean
Square (LMS) diharapkan dapat menghilangkan noise
dari sinyal yang telah terkena noise.
Jenis algoritma LMS ini juga digunakan pada penelitian yang dilakukan oleh Sayed A.Hadei, dan M lotfizad yang berjudul ”A family of Adaptive Filter
Algorithm in Noise Cancellation For Speech Enhancement” [2].
Selain kedua Penelitian diatas penelitian tentang penghapusan noise dengan sistem adaptif ini juga dilakukan oleh Ikeda dan Sugiyama (1999)“An Adaptive Noise Canceller (ANC) with Low Signal Distortion For Speech Codecs ” [5], yang berkisar tentang penelitian mengenai efek nonlinier pada Least
Mean Square.
Filter adaptif merupakan sebuah filter dengan pengatur koefisien dimana parameter filter diatur sedemikian rupa sehingga dapat mengoptimalkan sinyal dari distorsi (cacat) seminimal mungkin [3].
Proses pembuatan implementasi filter adaptif ini dilakukan dengan bantuan perangkat lunak Code
Composer Studio,karena perangkat ini memiliki
banyak keunggulan,diantaranya kemudahan dalam pemrograman, dan mudah dalam proses desain rangkaian [4].Seperti board yang digunakan pula oleh E Kaymak , M A Atherton ,K R G Rotter dan B Millar
pada penelitiannya yang berjudul “Real-time adaptive
filtering of dental drill noise using a digital signal processor”[6] .
2. Gambaran Sistem 2.1. Filter FIR
Dalam pemrosesan sinyal, fungsi filter adalah untuk menghapus bagian yang tidak diinginkan dari sinyal,seperti gangguan acak,atau untuk mengambil bagian yang berguna dari sebuah sinyal yang berada di dalam rentang frekuensi tertentu [1].
Unfiltered filtered Signal Signal
Gambar 1. Blok diagram filter
Pada filter ideal semua sinyal yang memiliki komponen frekuensi dibawah nilai cut-off harus dilewatkan dan semua komponen frekuensi diatas frekuensi cut-off harus direject [1].Respon impulse pada filter ideal dapat dinyatakan sebagai berikut : ℎ [ ] = ( ) − ∞ < < ∞ (1)
dimana :
ωc = nilai frekuensi cut off
n = merupakan indek nilai sample waktu diskrit Dan selanjutnya dikenal sebagai filterInfinite
Impulse Response (IIR) .Filter ini memiliki respon
frekuensi [1] seperti berikut :
( ω) = 0, ω ≤ ω ≤ ω (2)
0, ω ≤ ω ≤ π
Namun Filter ideal semacam ini tidak mungkin
untuk direalisasikan secara fisis.Yang paling mungkin
adalah menyusun suatu filter yang memiliki
karakteristik mendekati filter ideal tersebut.[1].Cara
untuk memperoleh pendekatan adalah dengan
memotong respon impulse-nya mulai dari titik nol sampai dengan suatu nilai N tertentu [1].Dengan demikian persamaan (1) diatas harus dimodifikasi menjadi :
h( )= ℎ ( ), 0 ≤ ≤ N – 1 (3)
0, n yang lain
Respon ini merupakan bentuk respon impulse yang selanjutnya dikenal sebagai Finite Impulse
Response (FIR). Finite Impulse Response (FIR)
merupakan salah satu filter digital yang mempunyai
unit sample response yang berhingga[4]. Karakteristik
dasar dari filter FIR (Ifeachor, 1993) [1] adalah sebagai berikut :
dimana :
k = 0,1,….N-1 adalah koefisien respon impulse filter
N = panjang filter
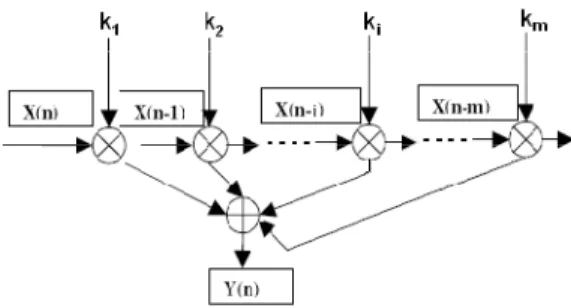
Gambar 2 Topology Filter FIR 2.2. Filter Adaptif LMS
Sistem adaptif merupakan suatu sistem yang mampu menyesuaikan dan dapat beadaptasi langsung dengan kondisi lingkunganya [2]-[3].
Least Mean Square (LMS) adalah algoritma
dalam filter adaptif digunakan untuk mengupdate koefisien filter (bobot) yang diharapkan [2]-[8].Yang nantinya akan menghasilkan error yang sekecil-kecilnya [8].Rumus dari algoritma LMS [1]-[2] adalah sebagai berikut :
= + µe(n) (n) (5) Dimana :
= update koefisien filter = koefisien filter yang lama
µ = rate convergence
e(n) = error yang dihasilkan
(n) = sinyal masukan
Gambar 3. FIR filter algoritma LMS
Bentuk pemodelan sistem pada algoritma LMS [8],
adalah sebagai berikut :
1. Menentukan sejumlah parameter atau bobot
hingga sebagai penentu karakteristik yang di
ubah-ubah dalam rangka pengadaptifan sistem 2. Membuat Algoritma yang mengatur prosedur
perubahan parameter- parameter tersebut
3. Membangkitkan sinyal yang berfungsi sebagai sinyal masukan yang berfungsi sebagai penggerak sistem adaptif ini.
4. Membandingkan sinyal pembanding (Sinyal yang
diharapkan) , dengan output dari sistem
adaptif ini
5. Membangkitkan sinyal galat €k untuk memantau dan menginisialisasi algoritma pengatur adaptasi nya
Respon filter FIR menghasilkan estimasi mean-square (akar rata-rata) yang minimum dari proses yang
diharapkan d(n) [2].Dan keluaran dari filter FIR adalah:
Dimana
= [wn(0), wn(1), ..., wn(p)]
T
= vektor koefisien filter pada waktu n, dan pada keadaan yang sebenarnya
Sinyal yang diinginkan d(n) tidak diketahui dan cenderung dinyatakan dengan fungsi random [8].Maka dimisalkan sinyal d(n) merupakan sinyal yang
dibentuk dari sinyal sinus dan beramplitudo
maksimum sama dengan satu. Disini diharapkan sinyal hasil keluaran dari proses adaptif e(n) akan mendekati sinyal yang diinginkan d(n) [2]-[8]. Semakin mirip dengan sinyal yang diinginkan maka MSE akan semakin minimum [1]-[2]-[8].Sehingga nilai estimasi-nya memiliki persamaan sebagai berikut :
Target mendapatkan nilai MSE minimum dikenal
sebagai algoritma LMS (Least Mean
Square).Algoritma LMS konvergen dalam rata-rata
jika ukuran langkah μ [1], memenuhi persamaan : Dimana :
= rate of convergency
2.3.DSK TMS320C6713
Dalam sistem ini digunakan sebuah kit / kartu DSP yang disebut dengan DSK (DSP Starter Kit) TMS32C6711 [4]. Seperti kit yang digunakan pula pada penelitian yang dilakukan oleh Gunawan Ariyanto, Nurgiyatna dan Endah Sudarmilah yang berjudul “Implementasi Filter Digital Finite Impulse
3 Response Metode Penjendelaan Blackman pada DSP TMS320C6711”[4].
Di dalam kartu tersebut berisi komponen utama, yaitu DSP TMS320C6711, dan beberapa peripheral tambahan sehingga kartu tersebut menjadi siap digunakan untuk berbagai percobaan yang berkaitan
dengan pengolahan isyarat digital [4]. DSK
TMS32C6711 selain berupa hardware (yaitu kartu
DSP itu sendiri) juga menyertakan software
pendukungnya, yaitu yang disebut dengan CCS (Code
Composer Studio) [4].
CCS adalah sebuah IDE (Integrated Development
Environment) yaitu sebuah program yang sudah
terpadu yang dikhususkan untuk pengembangan
software-software pengolahan isyarat digital yang
berbasis processor [4].CCS menyediakan banyak hal mulai dari editor untuk penulisan program, compiler, linker, berbagai tool untuk proses debugger dan manajemen sebuah project, serta sampai pada tool-tool untuk transfer data secara real-time antara host (PC) dan Target (DSK)[4].
Code Composer Studio, dibuat oleh Texas Instrument dimana CCS ini dilengkapi dengan IDE
(Integrated Development Environtment) yang dapat dipergunakan untuk meng-edit, build, dan men-debug program pada sebuah target project yang dibuat[4]-[9].Project adalah istilah untuk pembuatan suatu aplikasi dimana aplikasi ini adalah aplikasi yang ingin dibuat .dalam hal ini jenis aplikasi nya adalah adaptif
filter FIR.aplikasi ini dibuat dengan memasukan
file-file library dan juga source yang diperlukan ke dalam
project untuk mendapatkan hasil keluaran filter yang realtime yang ditampilkan pada osciloscope.
3. Rancangan Sistem
Untuk merealisasikan implementasi adaptif FIR filter secara real time diperlukan DSP TMS320C6713 yang didukung oleh personal komputer yang didalamnya sudah terinstall perangkat lunak Code
Composer Studio (CCS) [4] untuk mendrive DSP Card
tersebut.Sebagai sumber sinyal digunakan function
generator yang mampu bekerja pada frekuensi suara
(300 ~ 4000 Hz), dalam hal ini kita gunakan yang mampu membangkitkan sinyal sinus, dengan frekuensi kerja dari DC sampai 2 MHz[4]-[8]. Untuk menguji hasilnya kita gunakan sebuah osiloskop yang dapat dilengkapi dengan fasilitas storage system [4].Adapun langkah-langkah yang dilakukan dalam pembuatan sistem ini adalah sebagai berikut :
1. Inisialisasi board DSK TMS320C6713 2. Inisialisasi port serial McBSP0 3. Inisialisasi support file codec-DSK 4. Mengaktifkan interupsi port serial
5. Membaca (mengambil) sample dari port serial McBSP0 yang dihasilan oleh ADC atau IDE. 6. Melakukan operasi pemfilteran terhadap sample
yang telah diambil
7. Mengirimkan hasilnya ke port serial yang akan diolah oleh Code Composer Studio IDE
Semua prosedur diatas dikerjakan secara urut, setelah selesai sampai pada nomor 7 maka program akan kembali lagi (looping) ke no 5 dan demikian
seterusnya. Perlu juga diketahui bahwa cara
pembacaan data dan penulisan data dilakukan secara
polling, yaitu program menjadwal secara rutin waktu
waktu pembacaan dan pengiriman data dari dan ke
serial port yang terhubung dengan codec[4]. 4. Pengujian dan Analisa
Skema pengujian pada sistem ini ini ditunjukkan pada Gambar 4, dimana hasil akhir yang hendak diperoleh pada tahap pengujian adalah respon
frekuensi filter.
Gambar 4. Blok Skema Pengujian adaptif filter FIR
Sinyal masukan filter adaptif secara real time ini adalah berupa sinyal sinusoida yang telah tercampur dengan sinyal Derau putih Gaussian dengan amplitudo sebesar 2Vpp. Bentuk sinyal derau Gaussian Putih adalah sebagai berkut :
Gambar 5. Sinyal sinusoidal (atas) dan sinyal Sinus tercampur noise Gaussian (bawah) pada
frekuensi 800 Hz,bobot 55 dan µ= 6E-10; T/div =
500µs V/div = 50 mV
Derau putih Gaussian merupakan sinyal derau
hasil dari proses stokastik yang memiliki
karakteristik rapat spektral daya noise merata di sepanjang range frekuensi. White noise ini memiliki daya atau energi yang sama untuk semua komponen frekuensinya.Tampilan sinyal sinusoidal yang telah tercampur derau Gaussian adalah sebagai berikut :
4
Gambar 6 Sinyal sinusoidal (atas) dan sinyal Sinus tercampur noise Gaussian (bawah) pada frekuensi
800 Hz,bobot 55 dan µ= 6E-10; T/div = 500µs V/div = 50 mV
Gambar 7. Sinyal Keluaran adaptif filter Y(n) pada
frekuensi 5 Khz
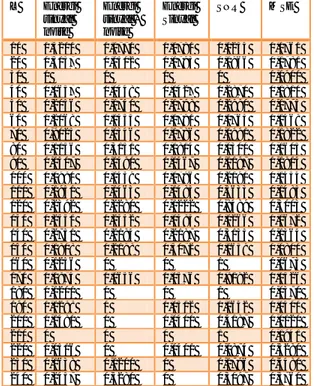
Tabel 1. Nilai perubahan energi sinyal ,energi noise dan energi sinyal + noise,MSE dan SNR pada adaptif filter FIR untuk setiap kenaikan nilai L dan µ = 6E-10 dan iterasi = 10000, delay = 4 L Energi sinyal noise Energi sinyal + noise Energi Sinyal SNR MSE 10 0,3200 0,1770 0,1790 0,0254 0,0760 20 0,3137 0,0502 0,1793 0,1966 0,1781 30 0 0 0 0 0,0900 40 0,0657 0,0448 0,1427 0,2870 0,1810 50 0,2056 0,1740 0,1798 0,2990 0,1775 60 0,2069 0,1455 0,1790 0,0763 0,1469 70 0,9025 0,0346 0,1786 0,0991 0,1822 80 0,1156 0,3151 0,1814 0,0300 0,1605 90 0,0407 0,1490 0,1467 0,1197 0,1814 100 0,0980 0,1439 0,1796 0,2190 0,1454 110 0,1951 0,1465 0,1485 0,5633 0,1485 120 0,2392 0,2280 0,1222 0,8489 0,3003 130 0,2551 0,2332 0,1485 0,1266 0,1672 140 0,2751 0,2184 0,2187 0,3135 0,1364 150 0,1808 0,2198 0,3072 0,1659 0,0800 160 0,1256 0 0 1 0,0673 170 0,0874 0,0656 0,0576 0,8192 0,0526 180 0,1201 0 0 1 0,0370 190 0,1288 0 0,0512 0,1642 0,0400 200 0,1480 0 0,0400 0,4187 0,0120 210 0 0 0 1 0,1941 220 0,0516 0 0,0401 0,0874 0,5280 230 0,1638 0,1200 0 0,1796 0,4480 240 0,2457 0,5280 0 0,3097 0,5760
nilai energi sinyal yang didapat pada pada setiap kenaikan L sangat fluktuatif, nilai energi sinyal
terbesar terjadi pada saat L = 140 yakni sebesar 0,2751. Energi noise mengalami kenaikan pada saat nilai L diperbesar dari 10 sampai 150, dimana nilai kenaikan yang terjadi sebesar 0,1282 namun kembali menurun pada saat L nya lebih besar dari 150, penurunannya bahkan hingga mencapai 0,36.
Sedangkan untuk nilai SNR juga mengalami perubahan yang tidak menentu dan fluktuatif saat mengalami kenaikan nilai panjang filter. Nilai SNR tertinggi dicapai pada saat nilai panjang filter nya 120 yakni sebesar 0,8489. Nilai MSE nya terus bertambah pada saat nilai pnjang filter nya diperbesar sampai 120 yakni sebesar 0,3003 kemudian nilai ini menurun menjadi 0,1941 panjang filter nya terus ditambah sampai dengan 210, namun kenaikan nilai MSE terjadi kembali pada saat nilai panjang filter nya dinaikkan menjadi 220 dan akhirnya mencapai nilai MSE tertinggi pada saat nilai panjang filter dinaikkan menjadi 240 yakni sebesar 0,5760.
Hal ini menunjukkan bahwa kenaikan panjang filter tidak terlalu mempengaruhi nilai energi dari sinyal dan juga noise, namun kenaikan panjang filter ini mempengaruhi nilai SNR dan juga MSE, dimana nilai SNR bertambah besar dan juga nilai MSE nya.
Gambar 8. Nilai perubahan energy sinyal ,energy noise dan energy sinyal bertambah noise pada adaptif filter FIR untuk setiap kenaikan nilai L dan µ = 6E-10 dan iterasi = 10000,delay 4
Didapatkan nilai energi sinyal dan energi noise masih sangat fluktuatif pada saat mengalami kenaikan nilai panjang filter, hal ini membuktikan bahwa kenaikan panjang filter tidak terlalu mempengaruhi nilai energi dari sinyal baik itu derau atapun derau + sinyal. Pada saat nilai panjang filter nya diperbesar dari 10 hingga menjadi 30 nilai energi sinyal dan energi sinyal + derau menurun hingga menjadi 0, kemudian nilai energy ini naik secara perlahan – lahan kembali ketika nilai panjang filternya dinaikkan hingga menjadi 160, nilai kenaikan energy sinyal hingga mencapai 0,1645 watt, nilai ini kemudian kembali menurun saat nilai panjang filter nya diperbesar hingga menjadi 220, nilai penurunan energy sinyal nya cukup besar yakni
20 40 60 80 100 120 140 160 180 200 220 240 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
perubahan Nilai energi noise dan energi sinyal + noise tiap kenaikan panjang filter
Panjang filter En e rg i s in y a l(w a tt ) Energi noise Energi sinyal + noise energi sinyal
5
mencapai 0,2671.kemudian pada saat nilai panjang filter dinaikkan menjadi 230 nilai energy nya menjadi konstan 0 sampai pada kenaikan panjang filter berikutnya.
Gambar 9 . Nilai SNR dan MSE adaptif filter FIR untuk setiap kenaikan nilai L dan µ = 6E-10 dan iterasi = 10000,delay 4
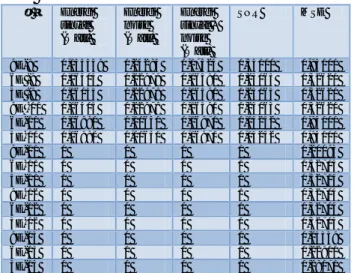
Tabel 2. perubahan nilai energi sinyal dan energi
sinyal + noise , SNR dan MSE saat L=120, iterasi=1000, delay=4 µ Energi sinyal (Watt) Energi noise (Watt) Energi sinyal + noise (Watt) SNR MSE 9E-9 0,155559 0,24284 0,17324 0,34100 0,93000 6E -9 0,16405 0,22979 0,16591 0,23063 0,32620 3E -9 0,16045 0,22979 0,16591 0,23063 0,32620 9E -10 0,16405 0,22979 0,16591 0,23063 0,32620 6E-10 0,16981 0,11630 0,16971 0,14252 0,94000 3E-10 0,16981 0,11630 0,16971 0,14252 0,94000 9E-11 0 0 0 1 0,20093 6E-11 0 0 0 1 0,32704 3E-11 0 0 0 1 0,32704 9E-12 0 0 0 1 0,32704 6E-12 0 0 0 1 0,32704 3E-12 0 0 0 1 0,32704 9E-13 0 0 0 1 0,23339 6E-13 0 0 0 1 0,22900 3E-13 0 0 0 1 0,28071
Dari Tabel 2 didapatkan perbaikan sinyal yang cukup baik. Dimana laju konvergensi diubah untuk mengupdate konvergensi koefisien filter. Didapatkan nilai SNR naik apabila nilai laju konvergensi nya diturunkan. Pada nilai µ < 3E-10 nilai SNR yang didapat tetap kontinyu bernilai 1, nilai SNR terbaik adalah pada saat µ > 9E-11 yakni sebesar 1.Nilai MSE naik saat nilai laju konvegensi diturunkan dari 9E-9 sampai dengan 3E-10 ,nilai selisih kenaikan MSE ini
hingga mencapai 0,8470. Nilai MSE terbaik
didapatkan pada saat nilai laju konvergensi nya 3E-10 dan 6E-10 yakni sebesar 0,9400,nilai MSE turun secara konstan pada saat nilai konvergensi rate nya diturunkan 9E-9 sampai dengan 3E-13, dimana nilai selisih penurunannya hingga mencapai 0,64929.
Gambar 10. Nilai SNR dan MSE pada adaptif filter FIR untuk setiap kenaikan nilai µ pada iterasi = 1000, delay= 4 dan L = 120
Gambar 10 menunjukkan nilai kenaikan SNR akibat penurunan nilai laju konvergensi dimana kenaikannya mencapai 0,98659. pada nilai µ < 3E-10 nilai SNR yang didapat tetap kontinyu bernilai 1,nilai SNR terbaik adalah pada saat µ > 9E-11 yakni sebesar 1.Nilai MSE naik saat nilai konegensi rate diturunkan dari 9E-9 sampai dengan 3E-10, nilai selisih kenaikan MSE ini hingga mencapai 0,8470. Nilai MSE terbaik didapatkan pada saat nilai laju konvergensi nya 6E-13 yakni sebesar 0,22900 , dimana kemudian nilai MSE ini turun secara konstan saat laju konvergensi nya diturunkan dari 9E-9 sampai dengan 3E-13, dimana nilai selisih penurunannya hingga mencapai 0,65929.
Gambar 11. Nilai perubahan energi sinyal ,energi noise dan energi sinyal bertambah noise pada adaptif filter FIR untuk setiap kenaikan nilai µ pada iterasi = 1000, delay= 4 dan L
= 120
Pada saat nilai iterasi nya diturunkan nilai energy sinyal,noise dan sinyal + noise nya meningkat pada saat nilai konvergensi rate nya diturunkan,hal ini dibuktikan dari gambar 4.20 ,dimana nilai energi noise dan meningkat saat laju konvergensi nya diturunkan dari 9E-9 sampai dengan 3E-10, selisih kenaikannya hingga mencapai 0,014251. Energi sinyal dan energy
20 40 60 80 100 120 140 160 180 200 220 240 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
perubahan SNR dan MSE tiap kenaikan panjang filter
Panjang filter E n e rg i s in y a l( w a tt ) SNR MSE 1 2 3 4 5 6 7 8 9 x 10-9 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
perubahan SNR dan MSE tiap kenaikan panjang filter(L=120,iterasi=1000)
Konvergensi rate E n e rg i s in y a l( w a tt ) SNR MSE 1 2 3 4 5 6 7 8 9 x 10-9 0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28
perubahan nilai energi sinyal dan energi sinyal + noise (L=120,iterasi=1000)
Konvergensi rate E n e rg i s in y a l( w a tt ) Energi sinyal Energi Noise energi sinyal + noise
6
sinyal + noise perlahan turun saat nial laju konvergensi nya diturunkan dari 9E-9 sampai 3E-10 ,selisih penurunannya masing – masing mencapai 0,09654 dan 0,000353 .sedangkan pada saat nilai konvergensi rate < 9E-11 nilai energi nya masing- masing mulai kontstan bernilai 0.Berikut Ini adalah tampilan dari sinyal keluaran adaptif filter dimana didapatkan sinyal yang semakin mendekati sinyal yang diharapkan (d(n)) pada saat nilai laju konvergensi nya diperbesar dari 6E-9 menjadi 6E-10.
Didapatkan perolehan sinyal keluaran adaptif filter yang baik.Karena sudah mirip dengan sinyal yang diharapkan yakni berupa sinyal masukan sinusoidal yang telah tercampur sinyal derau Gaussian putih (sinyal yang diharapkan d(n)).
5. Kesimpulan
Dari pengujian dan analisa yang dilakukan dapat disimpulkan sementara bahwa :
Hasil simulasi yang dirancang dengan matlab menghasilkan MSE minimum sebesar 0.0684 dengan panjang filter 5 pada µ (mu) atau ukuran langkah 0,1.
Pengamatan sinyal keluaran tidak dapat dilakukan sampai batas frekuensi cut off karena keterbatasan alat ukur yang digunakan,yang hanya mampu mengamati sinyal ≥ 20 mV.
Nilai energi pada saat konvergensi ratea 9E-10 , iterasi = 10000 menurun hingga 0,06641, untuk energi noise, 0,17157 untuk energi sinyal + noise dan 0,8620 untuk energi sinyal. Hal ini menunjukkan bahwa penurunan nilai konvergensi rate juga membuat nilai energi sinyal ,noise dan sinyal + noise menurun.
Selain penurunan konvergensi rate yang
mepengaruhi nilai energi jumlah iterasi yang digunakan juga sangat mempengaruhi nilai energi , SNR dan juga MSE dimana nilai MSE turun secara konstan pada saat nilai konvergensi rate nya diturunkan sampai dengan 3E-13 untuk nilai iterasi = 1000, dimana nilai selisih penurunannya hingga mencapai 0,65929
Saat iterasi =1000 dan nilai µ < 3E-10 nilai SNR yang didapat tetap kontinyu bernilai 1,nilai SNR terbaik adalah pada saat µ > 9E-11 yakni sebesar 1 .
6. Daftar Pustaka
[1] Renaldi Bonadr, Sunardi, Sujadi,”Perbandingan kinerja algoritma genetik untuk filter adaptif
penghilang noise “ ,Simposium Nasional I Rapi
2002
[2]. Sayed A. Hadei and M lotfizad,”A family of
Adaptive Filter Algorithm in Noise Cancellation For Speech Enhancement”, International Journal of Computer and Electrical Engineering, Vol. 2, No. 2, April 2010. 1793-8163 307
[4] Gunawan Ariyanto, Nurgiyatna,Endah udarmilah ,“Implementasi Filter Digital Finite Impulse
Response Metode Penjendelaan Blackman pada
DSP TMS320C6711”, JURNAL TEKNIK
ELEKTRO EMITOR Vol. 2, No. 1, Maret 2002. [5] Ikeda, Sugiyama, “An Adaptive Noise Canceller
(ANC) with Low Signal Distortion For Speech Codecs ”,
[6]
E Kaymak , M A Atherton ,K R G Rotter and B Millar “Real-time adaptive filtering of dental drill
noise using a digital signal processor”.Applied
Mechanics Group, Brunel University
[7] Uma Rajaram, Raja Paul Perinba†, Bharghava,”EHW Architecture for Design of FIR Filters for Adaptive Noise Cancellation”,
IJCSNS International Journal of Computer Science and Network Security, VOL.9 No.1, January 2009
[8] Sri Arttini, Dwi Prasetyowati,Adhi
Susanto,Thomas Sri Widodo dan Jazi Eko Istiyanto,”Hubungan antara galat hasil algoritma penghapusan bising adaptif LMS dengan derau gaussian putih (White gaussian Noise)”,Forum Teknik Vol.32,no 2,Mei 2008.
[9] Rio Harlan, Fajar Dwisatyo, Hafizh Fazha, M. Suryanegara, Dadang Gunawan, ”Analysis Of Real Time Audio Effect Design Using TMS320
C6713 DSK”. Rekayasa Aplikasi dan
Perancangan Industri – RAPI 2004 Fakultas Teknik Universitas Muhammadiyah Surakarta Surakarta.