i STARTING MOTOR INDUKSI 3 FASA BERBASIS
MIKROKONTROLER ARDUINO
OLEH
HAERUL HAKIM HASBAR HADA
105 82 1174 13 105 82 1186 13
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH MAKASSAR 2019
ii STARTING MOTOR INDUKSI TIGA FASA BERBASIS
MIKROKONTROLER ARDUINO
Skripsi
Diajukan sebagai salah satu syarat Untuk memperoleh gelar Sarjana Teknik
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Teknik
Disusun dan diajukan oleh
HAERUL HAKIM HASBAR HADA
105 82 1174 13 105 82 1186 13
PADA
UNIVERSITAS MUHAMMADIYAH MAKASSAR 2019
v Haerul Hakim1, Hasbar Hada2
1.2
Prodi Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Makassar Email: [email protected], [email protected]
ABSTRAK
Abstrak: Haerul Hakim dan Hasbar Hada (2019). Starting motor induksi 3 fasa berbasis mikrokontroler arduino. Motor induksi adalah mesin listrik yang mengubah energi listrik menjadi energi mekanik. Motor induksi tiga phase banyak digunakan karena konstruksi yang sederhana dan perawatan yang mudah. Kendala operasi motor induksi ini adalah arus pengasutannya mencapai lima sampai tujuh kali arus nominal, sehingga diperlukan suatu metode pengasutan untuk mengatasi hal tersebut. Penelitian ini bertujuan untuk mensimulasikan alat starting dengan metode way delta dimana proses perpindahan dari way ke delta akan di atur secara otomatis pada sebuah rangkaian arduino dan beberapa relay. Penelitian ini akan menciptakan suatu alat starting motor induksi dengan metode way delta yang diatur secara otomatis dimana hal sangat membantu pekerjaan terutama dalam hal efisiensi waktu.
vi Haerul Hakim1, Hasbar Hada2
1.2
Prodi Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Makassar Email: [email protected], [email protected]
ABSTRAK
Abstract: Haerul Hakim and Hasbar Hada (2019). Starting 3 phase induction motor based on Arduino microcontroller. An induction motor is an electric machine that converts electrical energy into mechanical energy. Three phase induction motor is widely used because of simple construction and easy maintenance. The operating constraints of this induction motor are that the starting current reaches five to seven times the nominal current, so a starting method is needed to overcome this problem. This study aims to simulate starting with the way delta method where the process of moving from way to delta will be set automatically on an Arduino circuit and several relays. This study will create a tool for starting an induction motor with the way delta method that is automatically regulated where things really help work, especially in terms of time efficiency.
vii KATA PENGANTAR
Assalamu’alaikum Warahmatullahi Wabarakatuh.
Alhamdulillah segala puji bagi Allah SWT , sang pemilik dunia dan seisinya, tiada Tuhan selain Allah dan hanya kepada-Nya lah kita patut memohon dan berserah diri. Hanya karena nikmat kesehatan dan kesempatan dari Allah SWT lah kami dapat menyelesaikan laporan skripsi ini. Dan tak lupa pula kita kirimkan salam dan shalawat selalu kita haturkan kepada junjungan kita Nabi Muhammad SAW. Sang kekasih Allah, dengan syafaat dari beliaulah kita dapat terbebas dari zaman kejahiliyaan.
Penulis menyadari sepenuhnya bahwa dalam dalam penulisan skripsi ini masih banyak kekurangan-kekurangan, hal ini disebabkan karena akami selaku penulis hanyalah manusia biasa yang tak lepas dari kesalahn dan kekurangan baik itu di tinjau dari segi tehnis penulisan maupun perhitungan. Oleh karena itu kami selaku penulis siap menerima dengan ikhlas segala koreksiserta perbaikan guna menyempurakan penulisan ini agar nantinya dapat bermanfaat
Tak lupa pada kesempatan kali ini kami sebagai penulis mengucapkan banyak terima kasih kepada pihak yang telah membantu dan mendukung penulisan skripsi ini. Ucapan terima kasih kami sampaikan kepada :
1. Allah SWT yang telah memberikan kehidupan, keselamatan dan kesehatan baik jasmani dan rohani.
viii 2. Nabi Muhammad SAW yang senantiasa menjadi panutan kita.
3. Ayah, ibu serta kakak adik, terima kasih atas doa dan dukungannya selama proses penulisan skripsi.
4. Bapak Hamzah Al Imran, ST. MT, sebagai Dekan Fakultas Teknuk UniversitasMuhamadiyah Makassar.
5. Ibu Adriani , ST, MT, sebagai Ketua Jurusan Teknik Elektro Fakultas Teknik Universitas Muhammadiyah Makassar.
6. Bapak Dr. Eng. Ir. H. Zulfajri Basri Hasanuddin, M.Eng selaku pembimbing I dan Bapak Ir. Abdul Hafid, MT, selaku pembimbing II, yang telah banyak meluangkan waktunya dalam membimbing kami.
7. Bapak dan Ibu dosen serta staff pegawai pada Fakultas Teknik atas segala waktunya telah mendidik dan melayani penulis selam menikuti proses belajar mengajar di Universitas Muhammadiyah Makassar
Semoga semua pihak tersebut di atas mendapat pahala yang berlipat ganda di sisi Allah SWT dan skripsi yang ederhana ini dapat bermanfaat bagi penulis, rekan-rekan, mayarakat serta bangsa dan Negara ini.
Makasssar,13 Juni 2019
ix Daftar Isi
Sampul...
Halaman Judul……….. ii
Halaman Pengesahan……… iii
Abstrak……….. iv
Kata Pengantar ... vii
Daftar isi ... ix
Daftar gambar... xii
Daftar tabel ... xiv
Bab I Pendahuluan ... 1 1.1Latar belakang ... 1 1.2Rumusan masalah... 2 1.3Tujuan penulisan ... 2 1.4Batasan masalah ... 2 1.5Manfaat penelitian ... 2 1.6Sistematika penulisan ... 3
Bab II Tinjauan Pustaka……… 5
2.1 Mikrokontroler……….... 5
x
b. Pengertian arduino……… 6
2.2 Liquid Crystal Display (LCD)……… 7
2.3 Motor Induksi………. 9
a. Pengertian motor induksi………. 9
b. Prinsip kerja motor induksi………. 10
c. Konstruksi motor induksi……… 12
2.4 Lght Emitting Diode (LED)……….. 16
2.5 Software Arduino IDE……….. 17
2.6 Relay………. 18
Bab III Metode Penelitian……….. 20
3.1 Waktu dan Tempat Pelaksanaan……….. 20
3.1.1 Waktu………. 20
3.1.2 Tempat Pelaksanaan……….. 20
3.2 Diagram Proses Penelitian……… 22
3.3 Metode Penelitan……….. 23
3.4 Pengumpulan Alat/ Bahan……… 23
xi
3.6 Flowchart Program arduino...……….. 24
Bab IV Hasil dan Pembahasan………... 25
4.1 Pengujian Rangkaian Sistem Mikrokontroler……….. 26
4.4 Pengujian Alat……….. 26 4.5 Perhitungan Daya………. 27 Bab V Penutup……… 30 5.1 Kesimpulan………... 30 5.2 Saran………. 30 Daftar Pustaka……… 31 Lampiran……… 32
xii Daftar Gambar
Gambar 2.1 Jenis-jenis Arduino……….. 6
Gambar 2.2.1 Liquid Crystal Display (LCD)……….. 8
Gambar 2.3.1. Konstruksi motor induksi ……… 12
Gambar 2.3.2. Komponen stator motor induksi tiga fase……… 13
Gambar 2.3.4 Rotor Belitan………. 13
Gambar 2.3.5 Rangkaian Motor Induksi Rotor Belitan Terhubung Dengan Tahanan Luar……… 14
Gambar 2.3.6 Rotor Sangkar……….. 14
Gambar 2.3.7 Rangkaian Motor induksi Rotor Sangkar menggunakan ototransformator atau saklar λ-∆……….. 15
Gambar 2.4 Light Emitting Diode (LED)………... 16
Gambar 2.5. Software Arduino………... 18
Gambar 2.6. rangkaian relay 4 kaki……… 19
Gambar 2.6.1 rangkaian relay 4 kaki……….. 19
Gambar 2.6.2 rangkaian relay 5 kaki……….. 19
xiii
Gambar 3.2. Skema Rancangan……….. 23
Gambar 3.3 Skema Rangkaian………... 23
Gambar 3.4 Flowchart Program Arduino………... 24
xiv Daftar Tabel
Tabel 2.2.1 Deskripsi Pin LCD………. 8
Tabel 4.1 Indikator……… 27
Tabel 4.4.1 tegangan sebelum arduino aktif………. 27
1 BAB I
PENDAHULUAN 1.1. Latar Belakang
Motor Induksi 3 fasa merupakan alat penggerak yang banyak digunakan dalam dunia perindustrian. Hal tersebut dikarenakan motor ini mempunyai konstruksi yang sederhana, kokoh, harganya relatif murah, serta perawatannya yang mudah. Namun dalam pemakaiannya terdapat permasalahan awal. Yaitu lonjakan arus starting yang diterima lilitan atau rotor pada motor induksi tiga fasa secara terus menerus dan dalam waktu yang lama akan merusak belitan motor.
Pada kebanyakan motor induksi terutama motor induksi tiga fasa, arus starting bisa mencapai empat sampai tujuh kali dari besar arus nominalnya. Sehingga apabila hal ini terjadi di dunia perindustrian yang mayoritas menggunakan motor-motor dengan Horse Power yang besar, memungkinkan dapat terjadi lonjakan arus starting yang lebih besar dan ini tidak dapat diizinkan, karena dapat mengganggu jaringan dan dapat merusak motor itu sendiri.
Oleh karena itu dibutuhkan metode starting yang dapat megurangi lonjakan arus starting yang sangat besar. Metode starting untuk motor listrik ada beberapa macam. Diantaranya yaitu, DOL ( direct 2 on line ), star-delta, auto transformer, dan soft starting. Metode yang akan digunakan pada tugas akhir ini adalah metode starting motor dengan berbasis mikrokontroler.
2 Starting dengan metode ini adalah dengan cara memanfaatkan sebuah alat mikrokontroler
1.2. Rumusan Masalah
Adapun rumusan masalah sebagai berikut: a. Merakit alat starting motor induksi 3 fasa. b. Menganalisa tingkat keberhasilan alat.
1.3. Tujuan Penelitian
Adapun tujuan penulis melakukan penelitian ini yaitu:
1. Menciptakan alat starting motor induksi berbasis mikrokontroler. 2. Mendapatkan hasil dari pengujian alat yang telah di rancang.
1.4. Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
Menguji tingkat keberhasilan dari alat starting motor induksi tiga fasa berbasis mikrokonroler arduino yang di simulasikan dengan menggunakan lampu LED sebagai pengganti motor 3 fasa.
1.5. Manfaat Penelitian
• Memberikan informasi pada penulis dan pembaca mengenai perancangan serta proses perakitan alat starting motor yang akan di buat
3 • Dapat digunakan sebagai media pembelajaran dalam mata kuliah motor
induksi arus bolak-balik
• Sebagai referensi untuk penelitian-penelitian selanjutnya.
1.6. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan tentang starting motor induksi 3 fasa dengan menggunkan mikrokontroler, maka penulis membuat sistematika penulisan dalam penyusunan tugas akhir ini adalah sebagai berikut:
BAB I : PENDAHULUAN
Dalam bab ini berisi mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, manfaat penelitian yang dilakukan serta sistematika Penulisan dari hasil penelitian yang dilakukan.
BAB II : TINJAUAN PUSTAKA
Bab ini menjelaskan tentang teori-teori pendukung yang berkaitan dengan judul penelitian. Teori meliputi pengertian mikrokontroler, motor induksi, prinsip kerja motor induksi,dan konstruksi motor induksi 3 fasa,
BAB III : METODE PENELITIAN
Dalam bagian ini akan dibahas perancangan dari alat, yaitu waktu dan tempat pelaksanaan, diagram proses perancangan, dan metode penelitian.
4 BAB IV : HASIL DAN PEMBAHASAN
Hasil dan analisa dari penelitian akan dibahas pada bagian ini.
BAB V : PENUTUP (SIMPULAN DAN SARAN)
Kesimpulan dan saran dari hasil penelitian akan dibahas pada bab ini.
5 BAB II
TINJAUAN PUSTAKA 2.1Mikrokontroler
a. Pengertian Mikrokontroler
Mikrokontroler adalah sistem mikroprosesor lengkap yang terkandung di dalam sebuah chip. Mikrokontroler berbeda dari mikroprosesor serba guna yang digunakan dalam sebuah PC, karena di dalam sebuah mikrokontroler umumnya juga telah berisi komponen pendukung sistem minimal mikroprosesor, yakni memori dan antarmuka I/O, sedangkan di dalam mikroprosesor umumnya hanya berisi CPU saja.
Mikrokontroler ini pertama kali dibuat oleh Intel pada tahun 1976, yaitu mikrokontroler 8-bit seri Intel 8748. Mikrokontroler tersebut adalah bagian dari keluarga mikrokontroler MCS-48. Sebelumnya, Texas instruments telah memasarkan mikrokontroler 4-bit pertama yaitu TMS 1000 pada tahun 1974. TMS 1000 yang mulai dibuat sejak 1971 adalah mikrokomputer dalam sebuah chip, lengkap dengan RAM dan ROM.
Fungsi mikrokontroler ada banyak sekali sampai tidak bisa
disebutkan semua tapi ada beberapa yang penting – penting saja yaitu : a. Sebagai Counter
b. Sebagai Decoder dan Encoder
c. Sebagai Flip - Flop
d. Sebagai Pembangkit Osilasi
e. Sebagai Timer / Pewaktu
f. Sebagai ADC ( Analog Digital Converter )
6 a. AVR dimana mikrokontroler ini merupakan alat yang sering digunakan dalam pembuatan modul, project, dan pembelajaran. b. PIC
c. MCS51 d. ARM
b. Pengertian Arduino
Arduino merupakan pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri. Saat ini Arduino sangat populer di seluruh dunia. Ada beberapa jenis arduino yang dikenal di pasaran yaitu Arduino Nano,Arduino Uno,Arduino Mega dimana ketiganya memiliki fitur dan kelebihan masing-masing.
7 2.2Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah panel penampil yang dibuat dari bahan Kristal cair. Kristal dengan sifat-sifat khusus yang menampilkan warna lengkap yang berasal dari efek pantulan/transmisi cahaya dengan panjang gelombang pada sudut lihat tertentu. LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan.. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom.Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan.
Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pada sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa microampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan. Gambar berikut adalah contoh LCD 16 x 2yang umum digunakan :
8 Gambar 2.2.1 Liquid Crystal Display (LCD)
Tabel 2.2.1 Deskripsi Pin LCD
NO Nama Pin Deskripsi Port
1 VCC +5V VCC
2 GND 0V GND
3 VEE Tegangan Kontras LCD Trimpot 4 RS Register Select, 0=Input Instruksi, 1=Input
Data PD5 5 R/W’ 1=Read, 0=Write PD6 6 E Enable Clock PD7 7 D0 Data Bus 0 PC0 8 D1 Data Bus 1 PC1 9 D2 Data Bus 2 PC2 10 D3 Data Bus 3 PC3 11 D4 Data Bus 4 PC4 12 D5 Data Bus 5 PC5 13 D6 Data Bus 6 PC6 14 D7 Data Bus 7 PC7
15 Anode Teganga Positif Backlight vCC 16 Katode Tegangan Negatif Backlight Gnd
9 2.3Motor Induksi
a. Pengertian Motor Induksi
Motor induksi adalah motor listrik arus bolak-balik (AC) yang putaran rotornya tidak sama dengan putaran medan putar pada stator, dengan kata lain putaran rotor dengan putaran medan pada stator terdapat selisih putaran yang disebut slip.
Motor induksi merupakan motor yang memiliki konstruksi yang baik, harganya lebih murah dan mudah dalam pengaturan kecepatannya, Stabil ketika berbeban dan mempunyai efisiensi tinggi. Mesin induksi adalah mesin (AC) yang paling banyak digunakan dalam industri dengan skala besar maupun kecil, dan dalam rumah tangga. Alasannya adalah bahwa karakteristiknya hampir sesuai dengan kebutuhan dunia industri, pada umumnya dalam kaitannya dengan harga, kesempurnaan, pemeliharaan, dan kestabilan kecepatan. Mesin induksi (asinkron) ini pada umumnya hanya memiliki satu suplay tenaga yang mengeksitasi belitan stator. Belitan rotornya tidak terhubung langsung dengan sumber tenaga listrik, melainkan belitan ini dieksitasi oleh induksi dari perubahan medan magnetik yang disebabkan oleh arus pada belitan stator.
Hampir semua motor (AC) yang digunakan adalah motor induksi, Sebagian besar alat industri menggunakan tenaga listrik sebagai energi penggerak utamanya, dan di berbagai perindustrian banyak menggunakan mesin-mesin dengan penggerak uatamanya adalah Motor AC Phasa Satu.
10 Motor induksi satu fase banyak dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga kelemahannya.
Keuntungan motor induksi satu fase :
a. Lebih efisien. Sebagaimana dijelaskan diatas, bahwa listrik 3 fasa akan mengeluarkan arus yang lebih ringan. Begitupun pada motor listrik;
b. Lebih bertenaga. Ini adalah yang paling utama. Mesin yang menggunakan 3 fasa akan berenergi lebih besar karena dialiri dengan 3 fasa berbeda gelombang sekaligus;
c. Lebih mudah diutak atik. Pada umumnya, sebuah motor listrik 3 fasa memiliki 6 terminal, meskipun ada yang 3 terminal, terminal tersebut sebenarnya ada 6 namun direkayasa dan dimudahkan sehingga menghasilkan 3 terminal 9 kontak Hubung).
Kelemahan motor induksi satu fase : a. Kecepatan tidak mudah dikontrol b. Power faktor rendah pada beban ringan
c. Arus start biasanya 5 sampai 7 kali dari arus nominal b. Prinsip Kerja Motor Induksi
Motor induksi bekerja berdasarkan induksi elektromagnetik dari kumparan stator kepada kumparan rotornya. Apabila sumber tegangan satu fase dipasang pada kumparan stator, timbullah medan putar yang berputar
11 dengan kecepatan sinkron (Ns), besarnya Ns ditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan dengan :
Ns = 120 x f (rpm) p
Medan putar stator tersebut akan memotong batang konduktor pada rotor, sehingga pada kumparan rotor akan timbul tegangan induksi atau gaya gerak listrik (ggl) per fase sebesar : 𝐸𝑟 = 4,44𝑓𝑠𝑁𝑟𝑚 (volt)
Er = Tegangan induksi pada rotor saat rotor dalam keadaan diam (volt)
Nr = Jumlah lilitan kumparan rotor
𝑚 = Fluksi maksimum (Wb)
Karena kumparan rotor merupakan rangkaian yang tertutup ggl (E) akan menghasilkan arus (I). Adanya arus (I) di dalam medan magnet menimbulkan gaya (F) pada rotor. Bila kopel mula yang dihasilkan oleh gaya Lorenz (F) pada rotor cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator. Seperti yang sudah disebutkan sebelumnya bahwa tegangan induksi timbul karena terpotongnya batang konduktor rotor oleh medan magnet putar stator. Artinya agar adanya tegangan terinduksi maka diperlukan relatif antara kecepatan medan magnet putar stator (Ns) dan kecepatan putar rotor (Nr). Dan perbedaan antara Ns dan Nr ini disebut dengan slip (S) yang dinyatakan dengan :
( )
Bila Nr = Ns maka slip bernilai nol, tidak ada fluks yang memotong belitan rotor sehingga pada belitan rotor tidak diinduksikan tegangan, maka
12 tidak ada arus yang mengalir pada belitan rotor, dengan demikian tidak dihasilkan kopel. Kopel motor akan timbul bila Nr < Ns. Dilihat dari cara kerjanya, motor induksi disebut juga sebagai motor tak serempak atau asinkron.
c. Konstruksi Motor Induksi
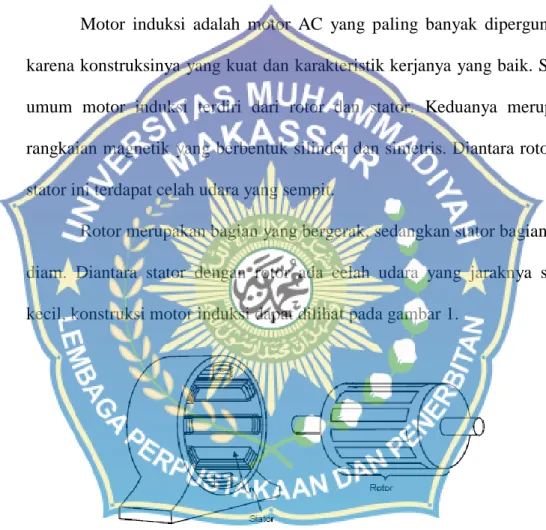
Motor induksi adalah motor AC yang paling banyak dipergunakan, karena konstruksinya yang kuat dan karakteristik kerjanya yang baik. Secara umum motor induksi terdiri dari rotor dan stator. Keduanya merupakan rangkaian magnetik yang berbentuk silinder dan simetris. Diantara rotor dan stator ini terdapat celah udara yang sempit.
Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan rotor ada celah udara yang jaraknya sangat kecil, konstruksi motor induksi dapat dilihat pada gambar 1.
Gambar 2.3.1. Konstruksi motor induksi
Stator merupakan bagian yang diam sebagai rangka tempat kumparan stator yang terpasang. Stator terdiri dari : inti stator, kumparan stator, dan alur stator. Motor induksi dilengkapi dengan dua kumparan stator yang dipasang terpisah, yaitu kumparan utama (main winding) atau sering disebut
13 dengan kumparan berputar dan kumparan bantu (auxiliary winding) atau sering disebut dengan kumparan start.
Gambar 2.3.2. Komponen stator motor induksi tiga fase
Komponen stator motor induksi satu fase terdiri dari : (a) Lempengan inti, (b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya, (c) Tumpukan inti dan kumparan dalam cangkang stator.
Rotor merupakan bagian yang berputar. Bagian ini terdiri dari : inti rotor, kumparan rotor dan alur rotor. Pada umumnya ada dua jenis rotor yang sering digunakan pada motor induksi yaitu, rotor belitan (wound rotor) dan rotor sangkar (squirrel cage rotor).
a. Rotor Belitan
Gambar 2.3.4 Rotor Belitan
Motor induksi jenis ini mempunyai rotor dengan belitan kumparan tiga fase sama seperti kumparan stator. Kumparan stator dan rotor juga
14 mempunyai jumlah kutub yang sama. Penambahan tahanan luar sampai harga tertentu dapat membuat kopel mula dapat mencapai harga kopel maksimumnya. Kopel mula yang besar memang diperlukan pada waktu start.
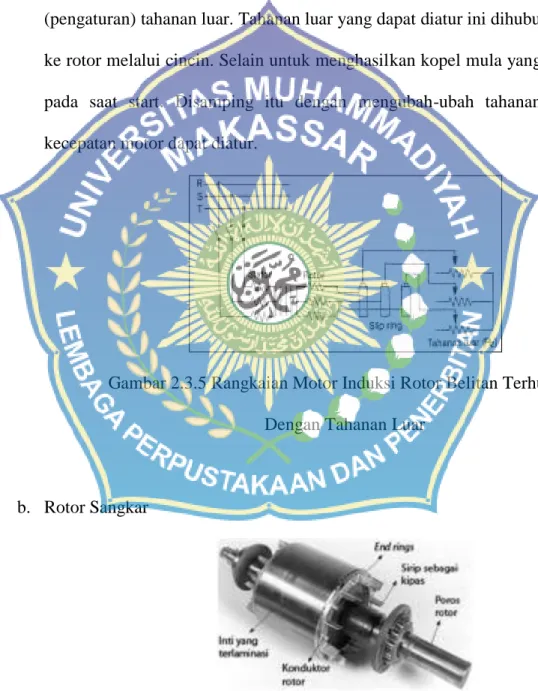
Motor induksi dengan rotor belitan memungkinkan penambahan (pengaturan) tahanan luar. Tahanan luar yang dapat diatur ini dihubungkan ke rotor melalui cincin. Selain untuk menghasilkan kopel mula yang besar pada saat start. Disamping itu dengan mengubah-ubah tahanan luar, kecepatan motor dapat diatur.
Gambar 2.3.5 Rangkaian Motor Induksi Rotor Belitan Terhubung Dengan Tahanan Luar
b. Rotor Sangkar
15 Motor induksi jenis ini mepunyai rotor dengan kumparan yang terdiri dari beberapa batang konduktor yang disusun sedemikian rupa hingga mempunyai sangkar tupai. Konstruksi rotor seperti ini sangat sederhana bila dibandingkan dengan rotor mesin listrik lainnya.
Dengan demikian harganya pun murah. Karena konstruksinya yang demikian, padanya tidak mungkin diberikan pengaturan tahanan luar seperti pada motor induksi dengan rotor belitan.
Untuk membatasi arus mula yang besar, tegangan sumber harus dikurangi dan biasanya digunakan ototransformator atau saklar λ-∆. Tetapi berkurangnya arus akan berakibat berkurangnya kopel mula. Untuk mengatasi hal ini dapat digunakan rotor jenis sangkar ganda.
Gambar 2.3.7 Rangkaian Motor induksi Rotor Sangkar menggunakan ototransformator atau saklar λ-∆
16 2.4Light Emitting Diode (LED)
Lampu LED adalah produk diode pancaran cahaya (LED) yang disusun menjadi sebuah lampu. Lampu LED memiliki usia pakai dan efisiensi listrik beberapa kali lipat lebih balik daripada lampu pijar dan tetap jauh lebih efisien daripada lampu neon, beberapa chip bahkan dapat menghasilkan lebih dari 300 lumen per watt. Pasar lampu LED diperkirakan akan meningkat hingga 12 kali lipat dalam satu dekade ke depan, dari US$2 milyar diawal tahun 2014 menjadi US$25 milyar pada tahun 2023.Lampu LED hanya butuh energi sebesar 10% dari energi yang dibutuhkan lampu pijar.
Tidak seperti lampu pijar dan lampu neon, lampu LED akan menghasilkan terang sepenuhnya tanpa perlu waktu pemanasan (warm-up); usia pakai lampu neon juga berkurang jika sering menyalakan dan mematikan lampu.Biaya awal lampu LED umumnya lebih mahal. Degradasi pewarna LED dan material pembungkus mengurangi keluaran cahaya seiring waktu.
17 2.5Software Arduino IDE
Arduino IDE dibuat dari bahasa pemrograman JAVA. Arduino IDE juga dilengkapi dengan library C/C++ yang biasa disebut Wiring yang membuat operasi input dan output menjadi lebih mudah. Arduino IDE ini dikembangkan dari software Processing yang dirombak menjadi Arduino IDE khusus untuk pemrograman dengan Arduino.
IDE itu merupakan kependekan dari Integrated Developtment
Enviroenment, atau secara bahasa mudahnya merupakan lingkungan
terintegrasi yang digunakan untuk melakukan pengembangan. Disebut sebagai lingkungan karena melalui software inilah Arduino dilakukan pemrograman untuk melakukan fungsi-fungsi yang dibenamkan melalui sintaks pemrograman. Arduino menggunakan bahasa pemrograman sendiri yang menyerupai bahasa C. Bahasa pemrograman Arduino (Sketch) sudah dilakukan perubahan untuk memudahkan pemula dalam melakukan pemrograman dari bahasa aslinya. Sebelum dijual ke pasaran, IC mikrokontroler Arduino telah ditanamkan suatu program bernama Bootlader yang berfungsi sebagai penengah antara compiler Arduino dengan mikrokontroler.
18 Gambar 2.5. Software Arduino
2.6Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
19 Normally Open (NO) yaitu kondisi awal sebelum
diaktifkan akan selalu berada di posisi OPEN (terbuka)
Gambar 2.6. Rangkaian relay 4 kaki
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila Kumparan Coil diberikan arus listrik, maka akan timbul gaya Elektromagnet yang kemudian menarik Armature untuk berpindah dari Posisi sebelumnya (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). Posisi dimana Armature tersebut berada sebelumnya (NC) akan menjadi OPEN atau tidak terhubung.
20 BAB III
METODE PENELITIAN
Metode penelitian yang digunakan dalam penyusunan tugas akhir ini adalah:
3.1. Waktu Dan Tempat Pelaksanaan 3.1.1. Waktu
Penelitian tugas akhir ini dilakukan selama 2 bulan, dimulai pada bulan September 2018 sampai dengan bulan Desember 2018. Penulis memulai dengan studi literatur yaitu, mencari buku-buku, jurnal dan situs-situs internet yang berkaitan dengan judul alat yang akan di rancang.
Pada bulan Oktober 2018 penulis mengumpulkan alat dan bahan yang diperlukan, setelah alat dan bahan sudah dikumpulkan penulis memulai melakukan perancangan alat pendeteksi kecepatan motor induksi dengan menggunakan mikrokontroler dan rotary encoder.
Pada bulan Desember 2018 penulis memulai menguji alat yang telah dirancang dan mencatat hasil yang didapatkan.
3.1.2. Tempat Pelaksanaan
Tempat pelaksanaan dilakukan di Universitas Muhammadiyah Makassar
21
Perakitan
Alat
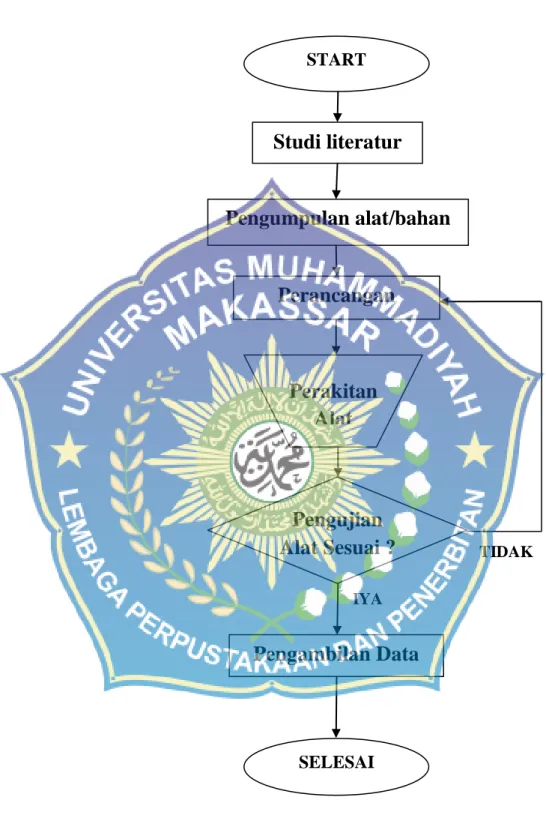
3.2. Diagram Proses PenelitianGambar 3.2. Bagan Alir dari Proses Penelitian
Studi literatur
Pengumpulan alat/bahan
Perancangan
Pengambilan Data
START SELESAIPengujian
Alat Sesuai ?
TIDAK22 Penulis memulai penelitian dengan mengumpulkan referensi atau teori yang berkaitan dengan perancangan alat yang akan di buat kemudian mulai mengumpulkan alat dan bahan yang dibutuhkan. Setelah alat dan bahan tersedia, selanjutnya dilakukan perancangan alat dan untuk proses akhir menguji alat yang telah dirancang untuk pengambilan data.
3.3. Metode Penelitian
Metode dalam penelitian ini, penulis mengumpulkan data dengan cara mencari buku, jurnal dan modul yang berkaitan dengan judul penelitian sebagai referensi untuk alat yang kami rancang.
3.4. Pengumpulan Alat / Bahan
Spesifikasi perangkat lunak yang digunakan dalam penelitian ini yaitu ; 1. sistem operasi yang digunakan dalam penelitian ini adalah windows 7 2. perangkat lunak yang digunakan sebagai penulisan kode starting motor
induksi adalah Software Arduino V1.8.7
Sedangkan perangkat keras utama yang digunakan dalam penelitian ini yaitu : 1. PC/Laptop
2. Led pengganti motor induksi 3. Lcd 16x2 sebagai indicator 4. Relay
23 3.5. Skema Perancangan dan gambar rangkaian
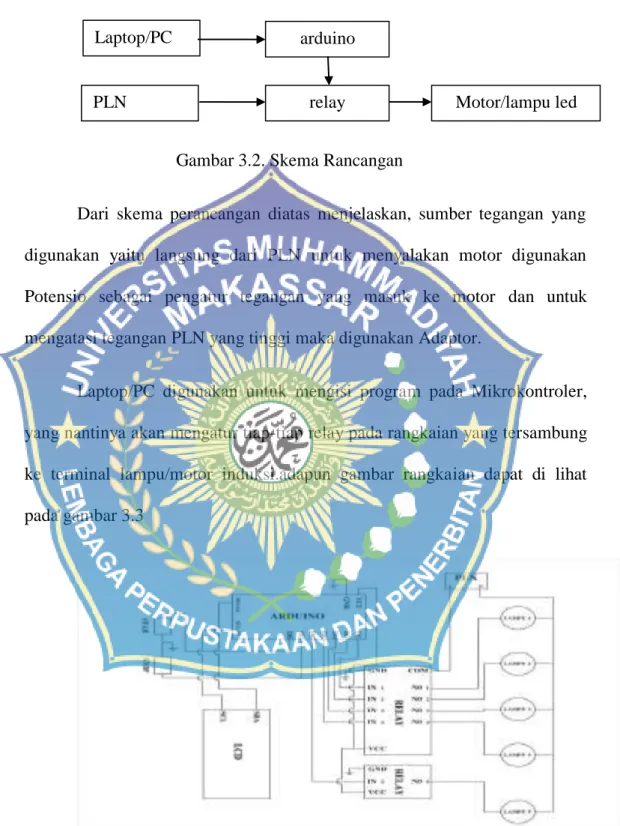
Gambar 3.2. Skema Rancangan
Dari skema perancangan diatas menjelaskan, sumber tegangan yang digunakan yaitu langsung dari PLN untuk menyalakan motor digunakan Potensio sebagai pengatur tegangan yang masuk ke motor dan untuk mengatasi tegangan PLN yang tinggi maka digunakan Adaptor.
Laptop/PC digunakan untuk mengisi program pada Mikrokontroler, yang nantinya akan mengatur tiap-tiap relay pada rangkaian yang tersambung ke terminal lampu/motor induksi.adapun gambar rangkaian dapat di lihat pada gambar 3.3
Gambar 3.3 Skema rangkaian
Motor/lampu led Laptop/PC arduino
24 3.6 Flowchart Program arduino
Start Tombol Start ditekan Inisialisasi Liquid crystal,Tombol, Relay, Program Program berjalan Rangkaian way aktif, 2 lampu menyala Rangkaian delta aktif, 3 lampu menyala Selesai
25 BAB IV
HASIL DAN PEMBAHASAN
Hasil penelitian dan pembahasan dalam skripsi ini berupa deskripsi mengenai mekanisme menghidupkan motor induksi 3 fasa menggunakan mikrokontroller, dimana terminal-terminal motor 3 fasa saya ubah ke lampu LED sebagai contoh pada saat push button yang ada pada alat penelitian ditekan dan lampu LED menyala itu menandakan bahwa motor 3 fasa sudah berjalan.
Pengujian terhadap keseluruhan sistem berguna untuk mengetahui bagaimana kinerja dan tingkat keberhasilan dari sistem tersebut, dan hasil dari perancangan dan pembuatan alat pun dapat di lihat pada gambar 4.1:
26 4.1Pengujian Rangkaian Sistem Mikrokontroller
Pada pengujian ini dilakukan program penyalaan LED yang bertujuan untuk mengetahui pin-pin input atau output (I/O) pada port berfungsi dengan baik atau tidak. Dengan listing program LED akan menyala sesuai dengan input yang diberikan, maka nantinya dapat dipastikan bahwa port I/O pada mikrokontroller sudah bekerja dengan baik atau tidak.
4.2Pengujian Alat
Pada tahap ini sumber listrik yang digunakan adalah milik PLN.Mula-mula dihubungkan arus listrik bertegangan 220V sebagai daya untuk menghidupkan Lampu, kemudian untuk menghidupkan mikrokontroler digunakan sebuah adaptor kecil bertegangan 5V, setelah semua jalur rangkaian terpasang,lalu menginput program yang telah dibuat sebelumnya menggunakan software Arduino.
Setelah proses penginputan selesai, mulai mengamati apakah program yang telah di buat dapat berjalan dengan baik atau masih ada error. Sesuai dengan perkiraan program pun dapat berjalan dengan baik dimana pada kondisi awal, saklar pada hubungan star dan delta berada pada posisi off,saat tegangan sudah di masukan hubungan yang pertama kali aktif adalah hubungan star (Y) setelah itu baru terhubung ke delta (Δ),,untuk jelasnya dapat dilihat pada table 4.1
27 Tabel 4.1 indikator
Y1 Y2 Δ1 Δ2 Δ3
OFF OFF OFF OFF OFF
ON ON OFF OFF OFF
OFF OFF ON ON ON
Dari tabel 4.4.di buat sebuah pogram arduino untuk mengatur perpindahan hubungan way (Y) ke delta (Δ) secara otomatis dengan menambahkan timer pada program tersebut.
4.3Perhitungan Daya
Tabel 4.2 Tegangan sebelum arduino aktif
No Chanel Pada Relay
Rangkaian Lampu
Tanpa Beban Dengan Beban
Way (Y) Delta (Δ) Way (Y) Delta (Δ)
1 Relay 1 222 VAC 222 VAC 217 VAC 217 VAC
2 Relay 2 222 VAC 222 VAC 217 VAC 217 VAC
3 Relay 3 222 VAC 222 VAC 217 VAC 217 VAC
4 Relay 4 222 VAC 222 VAC 217 VAC 217 VAC
28 Dari tabel 4.2 dapat dilihat pada saat rangkaian diberikan tegangan tanpa beban, setiap output relay yang diukur dengan avometer menunjukan angka 220 VAC dan saat di beri beban lampu maka tegangan berkurang menjadi 217 VAC. Kondisi ini terjadi pada saat rangkaian arduino belum di aktifkan. Pada saat arduino di aktifkan maka kondisi tegangan akan berubah sesuai dengan program yang telah di buat. Adapun kondisi tegangan dapat dilihat pada tabel 4.3.
Tabel 4.3 Tegangan saat arduino aktif
No Chanel Pada Relay
Rangkaian Lampu
Tanpa Beban Dengan Beban
Way (Y) Delta (Δ) Way (Y) Delta (Δ)
1 Relay 1 222 VAC 0 VAC 217 VAC 0 VAC
2 Relay 2 0 VAC 222 VAC 0 VAC 217 VAC
3 Relay 3 0 VAC 222 VAC 0 VAC 217 VAC
4 Relay 4 0 VAC 222 VAC 0 VAC 217 VAC
5 Relay 5 222 VAC 0 VAC 217 VAC 0 VAC
Pada tabel 4.5.2 ini rangkaian arduino sudah ditambahkan sehingga di dapatkan hasil pengukuran dimana relay 1 dan relay 5 yang merupakan rangkaian Way (Y) mendapat hasil tegangan 222 VAC tanpa beban dan
29 rangkaian Delta mendapat tegangan 0 VAC. Kondisi ini memang sudah diatur pada program arduino dimana relay 1 dan relay 5 adalah terminal yang menjalankan rangkaian Way pada motor 3 fasa. Saat diberi beban berupa lampu, avometer menunjukan hasil tegangan 271VAC. Saat 5 detik berselang pengukuran pada ralay 2,3, dan 4 mendapat tegangan 222 VAC yang menandakan rangkaian Delta sudah aktif sedangkan relay 1 dan 5 yang merupakan rangkaian Way sudah tidak mendapat tegangan lagi.
Relay yang digunakan ada 5 relay dimana spesifikasi dari tiap-tiap relay adalah 220 VAC dengan arus maksimal 10A, dengan kata lain setiap relay mampu mengangkat beban daya sampai dengan 2200 watt, jadi daya pada tiap-tiap terminal pada motor induksi yang terhubung dengan relay bisa dihubungkan dengan baik.
30 BAB V
PENUTUP 5.1 Kesimpulan
Dalam pembuatan tugas akhir ini, maka penulis dapat menyimpulkan beberapa hal, antara lain :
1. Ketika sumber tegangan belum di masukan maka posisi dari rangkaian star dan delta dalam keadaan off yang ditandai dengan lampu yang tidak mnyaala.
2. Saat sumber tegangan dimasukan, mikrokontroler mulai menganalisa program yang telah di input dan mualai menjalankan setiap perintah-perintah yang ada.
3. Rangkaian yang pertama kali aktif saat tegangan tersambung adalah rangkaian star (Y) yang ditandai dengan adanya 2 buah lampu led sebagai indikator yang menyala .
4. Setelah berselang waktu 5 detik program secara otomatis memindahkan rangkaian star yang pertama aktif ke rangkaian delta
5.2Saran
Masih diperlukan Pemahaman yang lebih baik tentang motor induksi 3 fase dengan menggunakan mikrokontroler agar pengontrolan motor induksi 3 fase yang dilakukan dapat lebih mudah dipahami agar hasil yang diperoleh dapat ditingkatkan.
31 DAFTAR PUSTAKA
Budiono, Rangkaian Listrik, Bandung, ITB: 1995
Daryanto. 2002. Pengetahuan Teknik Listrik. Jakarta. PT Bumi Aksara
Djoko Santoso, Teori Dasar Rangkaian Listrik, Yogyakarta: Aswaja Pressindo, 2003
Drs. Kismet Fadillah, Drs. Wurdono. 1999. Instalasi Motor-motor Listrik. Penerbit Angkasa, Bandung.
Kadir, Abdul. 2000. Distribusi dan Utilisasi Tenaga Listrik. Jakarta : Universitas Indonesia
Taufik Barlian, Rangkaian Listrik, Yogyakarta: Andi Offset, 2013
32
Lampiran
Berikut ini adalah program yang akkan digunakaan untuk menyalakan rangkaian tersebut: #include<LiquidCrystal_I2C.h> #define y1 5 //IN4 => 5 #define y2 6//IN => 6 #define d1 2 //IN1 => 2 #define d2 3 //IN2 => 3 #define d3 4 //IN3 => 4 #define pb_start 7 #define pb_stop 8 LiquidCrystal_I2C lcd(0x27,16,2); void setup() { lcd.begin(); Serial.begin(9600); pinMode(y1,OUTPUT); pinMode(y2,OUTPUT); pinMode(d1,OUTPUT); pinMode(d2,OUTPUT); pinMode(d3,OUTPUT); pinMode(pb_start,INPUT_PULLUP); pinMode(pb_stop,INPUT_PULLUP); digitalWrite(y1,HIGH); digitalWrite(y2,HIGH);
33 digitalWrite(d1,HIGH); digitalWrite(d2,HIGH); digitalWrite(d3,HIGH); lcd.setCursor(2,0); lcd.print("START MOTOR"); lcd.setCursor(0,1); lcd.print("TUGAS AKHIR 2019"); delay(5000); lcd.clear(); lcd.setCursor(3,0); lcd.print("TEKAN START"); lcd.setCursor(2,1); lcd.print("UNTUK MEMULAI"); } void loop() { if(digitalRead(pb_start)==LOW){ Serial.println("STARTING Y"); lcd.clear(); lcd.setCursor(1,0); lcd.print("MODE STARTING"); lcd.setCursor(0,1); lcd.print("STARTING Y"); digitalWrite(y1,LOW);
34 digitalWrite(y2,LOW); digitalWrite(d1,HIGH); digitalWrite(d2,HIGH); digitalWrite(d3,HIGH); delay(5000); lcd.clear(); lcd.setCursor(1,0); lcd.print("MODE STARTING"); lcd.setCursor(0,1); lcd.print("SWITCHING"); Serial.println("SWITCHING"); delay(2000); lcd.clear(); lcd.setCursor(1,0); lcd.print("MODE STARTING"); lcd.setCursor(0,1); lcd.print("STARTING DELTA"); Serial.println("STARTING DELTA"); digitalWrite(y1,HIGH); digitalWrite(y2,HIGH); digitalWrite(d1,LOW); digitalWrite(d2,LOW); digitalWrite(d3,LOW); } else if(digitalRead(pb_stop)==LOW){
35 lcd.clear(); lcd.setCursor(1,0); lcd.print("MOTOR STOP"); digitalWrite(y1,HIGH); digitalWrite(y2,HIGH); digitalWrite(d1,HIGH); digitalWrite(d2,HIGH); digitalWrite(d3,HIGH); } }