BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Motor listrik merupakan beban listrik yang paling banyak digunakan di dunia, Motor induksi tiga fasa adalah suatu mesin listrik yang mengubah energi listrik menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara medan stator dengan medan rotor. Penamaan motor ini berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar yang dihasilkan arus stator.
Motor induksi memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat keadaan normal dan tidak membutuhkan perawatan yang banyak. Namun, motor induksi memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan tidak bisa dilakukan tanpa merubah efisensi.
2.2 Konstruksi Motor Induksi Tiga Fasa
Secara umum konstruksi motor induksi tiga fasa terdiri dari stator dan rotor.
Stator merupakan bagian dari mesin yang tidak berputar dan terletak pada bagian luar.
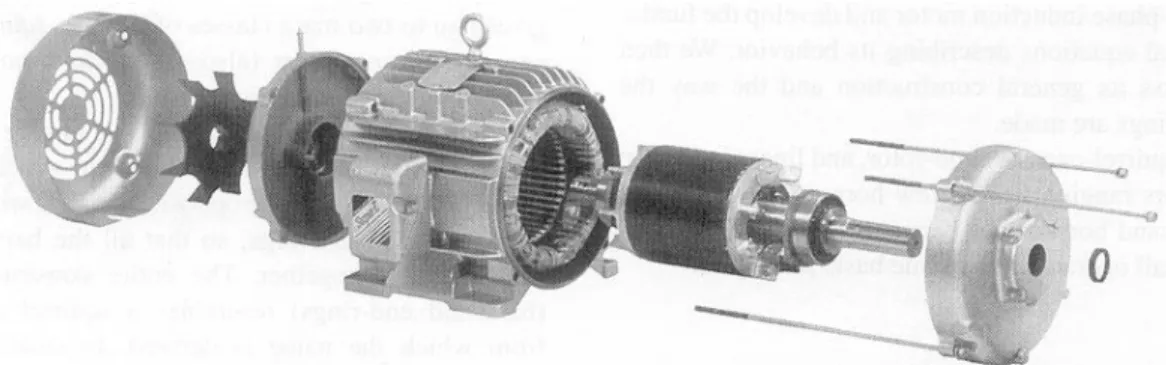
Sedangkan rotor merupakan bagian dari mesin yang berputar dan letaknya pada bagian dalam. Konstruksi motor induksi dapat dilihat pada gambar berikut.
Gambar 2.1 Konstruksi motor induksi tiga fasa
1. Stator
Stator adalah bagian dari mesin yang tidak berputar yang terletak pada bagian luar dan merupakan tempat mengalirkan arus beban. Stator terbuat dari besi bundar berlaminasi yang mempunyai alur – alur sebagai tempat meletakkan kumparan. Elemen laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)), tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan phasa dimana untuk motor tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2.(b)). Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, dan belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga phasa.
Gambar 2.2 Komponen stator motor induksi tiga fasa
(a) (b) (c)
(a) Lempengan inti
(b) Tumpukan inti dengan isolasi kertas
(c) Tumpukan inti dan kumparan dalam cangkang stator.
2. Rotor
Rotor adalah bagian dari mesin yang berputar dan letaknya pada bagian dalam.
Pada motor induksi terdapat dua tipe rotor yang berbeda yaitu rotor sangkar tupai dan rotor belitan. Kedua tipe rotor ini menggunakan laminasi melingkar yang terikat erat pada poros. Penampang rotor sangkar tupai memiliki konstruksi yang sederhana. Batang rotor dan cincin ujung sangkar tupai yang kecil merupakan coran tembaga atau aluminium dalam satu lempeng pada inti rotor. Pada motor yang lebih besar, batang rotor dibenamkan dalam alur rotor dan kemudian di las dengan kuat ke cincin ujung.
Apabila dilihat tanpa inti rotor, maka batang rotor ini kelihatan seperti kandang tupai.oleh karena itu motor induksi dengan rotor sangkar tupai dinamakan motor induksi sangkar tupai.
Pada ujung cincin penutup delekatkan kipas yang berfungsi sebagai pendingin.
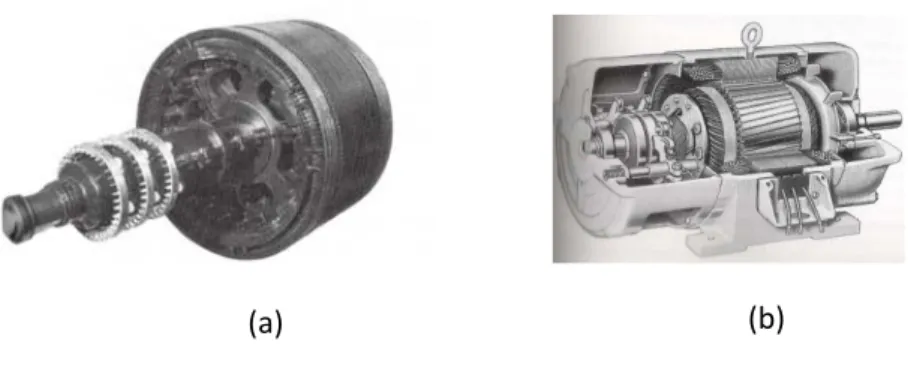
Rotor jenis ini tidak terisolasi, karena batangan dialiri arus yang besar pada tegangan rendah. Motor induksi dengan rotor sangkar tupai ditunjukkan pada Gambar 2.3.
Gambar 2.3 (a) tipikal rotor sangkar, (b) motor induksi rotor sangkar.
Batang poros
Cincin aluminium
aluminium
(a)
(b)
Pada tipe rotor belitan, slot rotor menampung belitan terisolasi yang mirip dengan belitan pada stator. Belitan rotor terdistribusi merata, biasanya terhubung bintang dan masing – masing ujung fasa terbuka yang terhubung pada cincin slip yang terpasang pada rotor. Pada motor rotor belitan, sikat karbon menekan cincin slip, oleh karena itu tahanan eksternal dapat dihubungkan seri dengan belitan rotor untuk mengontrol torsi start dan kecepatan selama pengasutan. Penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan torsi yang lebih besar dengan arus pengasutan yang lebih kecil dibanding rotor sangkar. Konstruksi motor induksi tiga fasa rotor belitan ditunjukkan pada Gambar 2.4.
Gambar 2.4 (a) tipikal rotor belitan, (b) motor induksi rotor belitan
2.3 Medan Putar
Perputaran rotor pada motor arus bolak – balik terjadi akibat adanya medan putar ( fluks yang berputar ) yang memotong rotor. Medan putar ini terjadi apabila kumparan stator dihubungkan dengan suplai fasa banyak, umumnya tiga fasa. Pada saat terminal tiga fasa motor induksi dihubungkan dengan suplai tiga fasa maka arus bolak – balik tiga fasa ia, ib, ic yang terpisah sebesar 1200 derajat satu sama lain akan mengalir pada kumparan stator. Arus – arus ini akan menghasilkan gaya gerak magnet yang kemudian menghasilkan fluks yang berputar atau disebut juga medan putar.
(a) (b)
Untuk melihat bagaimana medan putar dihasilkan, maka dapat diambil contoh sebuah motor induksi tiga fasa yang dihubungkan dengan sumber tiga fasa sehingga pada stator mengalir arus tiga fasa yang kemudian menghasilkan medan putar, seperti berikut ini :
Pada kondisi t0 dan t4 :
ia = Imax Fa = Fmax
ib = Fb = Fmax
ic = Fc = Fmax
Pada kondisi t1 :
ia = 0 Fa = 0
ib = Fb = Fmax
ic = Fc = Fmax
Pada kondisi t2 :
ia = - Imax Fa = - Fmax
ib = Fb = Fmax
ic = Fc = Fmax
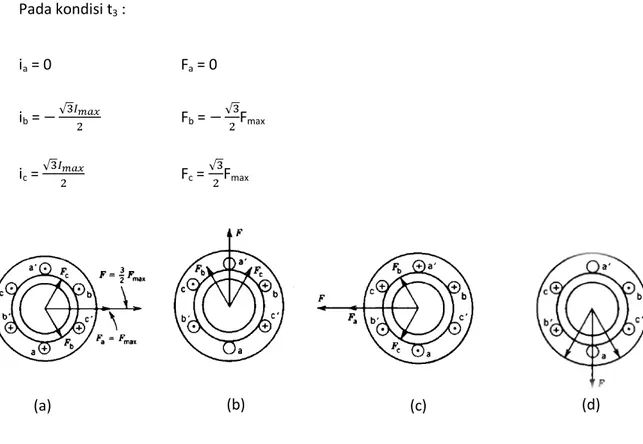
Pada kondisi t3 :
ia = 0 Fa = 0
ib = Fb = Fmax
ic = Fc = Fmax
Gambar 2.5 (a) kondisi t0 dan t4, (b) kondisi t1, (c) kondisi t2, (d) kondisi t3.
Kecepatan putaran medan putar stator dinamakan kecepatan sinkron, medan putar stator kemudian memotong konduktor pada batang rotor sehingga pada konduktor rotor timbul tegangan induksi yang mengakibatkan rotor ikut berputar setelah melalui beberapa proses. Arah putaran rotor motor induksi searah dengan arah putaran medan putar, namun kecepatan putaran rotor lebih rendah dari kecepatan sinkronnya. Perbedaan kecepatan putaran ini dinamakan slip motor induksi.
2.4 Slip
Kecepatan putaran rotor motor induksi harus lebih lambat dari kecepatan sinkronnya supaya konduktor pada rotor selalu dipotong oleh medan putar, sehingga pada rotor timbul tegangan induksi yang akan menghasilkan arus induksi pada rotor.
Arus induksi ini kemudian berinteraksi dengan fluks yang dihasilkan stator sehingga menghasilkan torsi. Selisih antara kecepatan putaran rotor dengan kecepatan
(a) (b) (c) (d)
(2.2) sinkronnya disebut slip (s). Pada umumnya slip dinyatakan dalam persen dari kecepatan sinkron,
Dimana :
Ns = kecepatan sinkron Nr = kecepatan putaran rotor
2.5 Prinsip Kerja Motor Induksi Tiga Fasa
Motor induksi adalah peralatan pengubah energi listrik ke bentuk energi mekanik. Listrik yang diubah merupakan listrik tiga fasa. Dalam motor induksi, tidak ada hubungan listrik ke rotor, arus rotor merupakan arus induksi. Tetapi ada kondisi yang sama seperti motor dc, dimana pada rotor mengalir arus. Arus ini berada dalam medan magnetik sehingga akan terjadi gaya (F) pada rotor yang akan menggerakkan rotor dalam arah tegak lurus medan.
Untuk memperjelas prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan dalam langkah – langkah berikut:
1. Apabila terminal stator motor induksi tiga fasa dihubungkan dengan sumber tegangan tiga fasa, maka pada kumparan stator mengalir arus tiga fasa.
2. Arus pada tiap fasa mengahasilkan fluksi bolak – balik yang berubah – ubah.
3. Penjumlahan atau interaksi ketiga fluksi bolak – balik tersebut menghasilkan medan putar yang berputar dengan kecepatan putar sinkron Ns. Besarnya nilai Ns ditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan dengan : ( rpm )
Dimana :
(2.3)
(2.4) f = frekuensi sumber
P = jumlah kutub
4. Fluksi yang berputar tersebut akan memotong konduktor pada batang rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar E2 yang besarnya adalah :
( Volt )
dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt) N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum(Wb)
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2
6. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor.
7. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator
8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron.
Perbedaan kecepatan medan stator (Ns) dan kecepatan rotor (Nr) disebut slip (s) dan dinyatakan seperti pada persamaan (2.1).
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya
( Volt )
dimana :
E2s=tegangan induksi pada rotor dalam keadaan berputar (Volt)
V1 Rc Xm E1
I1
Im
I0
+
- -
+
Ic
jX1
R1
''
I2
f2=s.f = frekuensi rotor (frekuensi rotor dalam keadaan berputar)
10. Bila Ns = Nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika Nr <
Ns. Apabila Nr > Ns maka mesin induksi akan beroperasi sebagai generator induksi yang akan menghasilkan energi listrik.
2.6 Rangkaian Ekivalen Motor Induksi Tiga Fasa
Sebuah motor induksi identik dengan sebuah transformator. Oleh sebab itu, rangkaian ekivalen motor induksi mirip dengan rangkaian ekivalen transformator.
Perbedaannya hanyalah bahwa kumparan rotor dari motor induksi berputar, yang berfungsi untuk menghasilkan daya mekanik. Rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut mempunyai nilai- nilai perfasa hal ini dimaksudkan untuk mempermudah analisis.
2.6.1 Rangkaian Ekivalen Stator
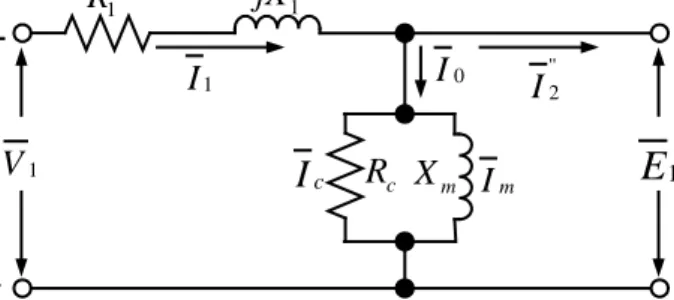
Putaran gelombang fluks pada celah udara membangkitkan ggl lawan tiga fasa yang seimbang pada belitan stator. Rangkaian ekivalen stator, seperti gambar 2.6 berikut ini.
Gambar 2.6. Rangkaian ekivalen stator per-fasa motor induksi.
(2.5) Besarnya tegangan terminal stator manjadi penjumlahan ggl lawan . ) dan jatuh tegangan pada impedansi bocor stator , dapat dinyatakan sebagai berikut :
dimana:
= tegangan terminal stator (Volt)
= ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt) = arus stator (Ampere)
= tahanan efektif stator (Ohm) = reaktansi bocor stator (Ohm)
Sebagaimana halnya pada transformator, arus stator terdiri dari dua komponen. Komponen pertama adalah komponen beban yang akan menghasilkan fluks yang akan melawan fluks yang dihasilkan oleh arus rotor. Komponen lainnya yaitu , arus ini terbagi lagi menjadi dua komponen yaitu komponen rugi-rugi inti yang sefasa dengan komponen rugi-rugi inti dan komponen magnetisasi yang menghasilkan fluks magnetik pada inti dan celah udara yang tertinggal dari .
2.6.2 Rangkaian Ekivalen Rotor
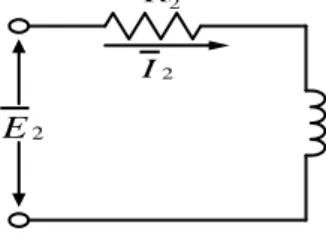
Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelum bergerak, kecepatan relative diantara putaran medan magnet dengan konductor rotor adalah kecepatan sinkron Ns. Pada kondisi ini tegangan induksi yang dibangkitkan pada rangkaian rotor adalah . karena seluruh belitan rotor dihubung-singkat maka akan mengalir arus akibat ggl induksi pada rotor. Sehingga dapat dituliskan persamaannya sebagai berikut :
(2.6)
(2.7) (2.8)
(2.9)
Dari bentuk persamaan di atas, rangkaian ekivalen rotor perfasa dalam keadaan diam digambarkan seperti gambar berikut.
I2
R2
E2 jX2
Gambar 2.7. Rangkaian ekivalen per-fasa rotor motor induksi keadaan diam dimana :
= arus rotor dalam keadaan diam (Ampere) = ggl induksi rotor dalam keadaan diam (Volt) = resistansi rotor (Ohm)
= reaktansi rotor dalam keadaan diam (Ohm)
Setelah rotor berputar maka ggl rotor perfasa dan reaktansi rotor perfasa masing-masing dipengaruhi oleh frekuensi, nilai reaktansi rotor dapat dijelaskan dari persamaan di bawah ini dimana nilainya tergantung dari induktansi dan frekuensi rotor.
= ωrL2 = 2πf2L2
Dengan f2 = sf, Maka:
= 2πsfL2 = s(2πfL2) =sX2
(2.10)
(2.11)
(2.12) Dengan demikian nilai dan X2 bergantung terhadap slip s, sementara nilai resistansi rotor perfasa tidak dipengaruhi oleh frekuensi sehingga tidak tergantung terhadap nilai slip s. Sehingga dari persamaan di atas dapat dibuat persamaannya menjadi :
Dengan membagi pembilang dan penyebut pada persamaan di atas dengan s, maka nilai arus rotor diperoleh seperti berikut :
Nilai dari sekarang lebih besar dari R2 dikarenakan s memiliki nilai dalam bentuk
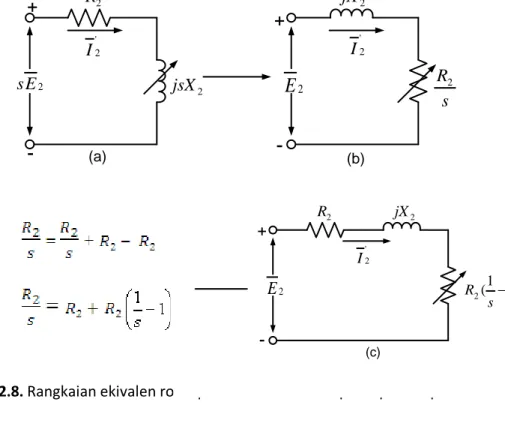
pecahan. Untuk itu, dapat dipecah menjadi sebuah bagian yang bernilai konstan R2
dan sebuah bagian yang variabel ( ), yaitu:
= + –
=
−11 s
Bagian pertama R2 merupakan tahanan rotor/fasa dan mewakilkan rugi tembaga. Bagian
kedua R2
−11
s merupakan sebuah beban tahanan-variabel. Daya yang dikirim ke beban ini mewakilkan daya mekanik keseluruhan yang dibangun di rotor. Untuk itu beban mekanik pada motor dapat digantikan dengan sebuah beban tahanan-variabel
dengan nilai R2
−11
s . Ini diketahui sebagai tahanan beban RL.
(2.13)
(2.14) RL = R2
−11 s
Dengan demikian persamaan (2.11) dapat dirubah menjadi :
−11
2 s
R
Dari persamaan (2.10), (2.11), (2.12) dan (2.14) di atas maka dapat digambarkan rangkaian ekivalen rotor seperti gambar 2.8. di bawah ini.
R2
E2
s
s R2 jsX2
jX2
'
I2 '
I2
(a) (b)
E2
+ +
- -
Gambar 2.8. Rangkaian ekivalen rotor per-fasa keadaan berputar pada slip = s
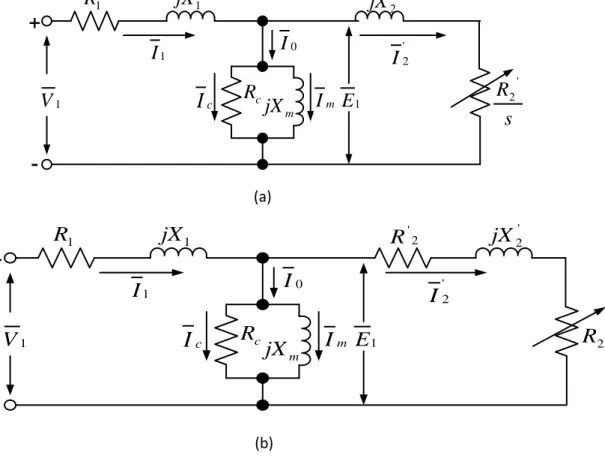
2.6.3 Rangkaian Ekivalen Lengkap
Dari penjelasan rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen perfasa motor induksi tiga fasa pada masing – masing fasa, seperti halnya seperti rangkaian ekivalen sebuah transformator.
R2
) 1 1
2( − s R jX2
'
I2
(c)
E2
+
-
V1 Rc E1
I1
Im
+
-
Ic E2
jX2
''
I2 I'2
R1 jX1
jXm
I0
s R2
Gambar 2.9. Rangkaian Ekivalen Motor Induksi Tiga Fasa
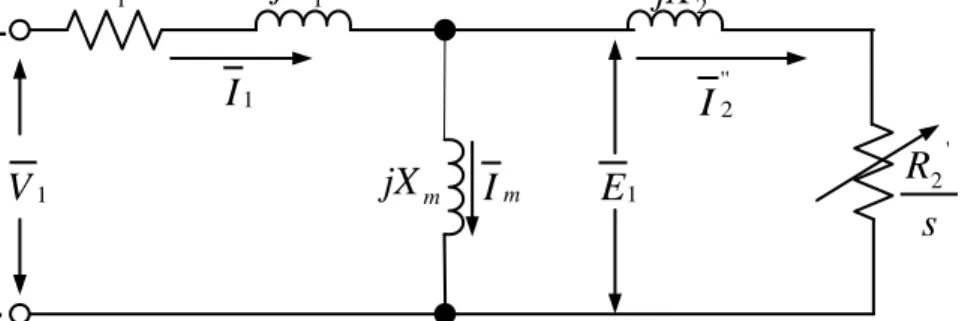
Untuk mempermudah perhitungan maka rangkaian ekivalen pada gambar di atas dapat dilihat dari sisi stator, seperti gambar rangkaian ekivalen berikut.
Rc
Im
Ic
I0
I1
V1 E1
s R2'
R1 jX1 '
jX2
jXm
'
I2
+
-
Rc Im Ic
I0
I1
) 1 1
'(
2 −
R s
2
R'
V1 E1
R1
'
I2
'
jX2
jX1
jXm
+
-
Gambar 2.10. Rangkaian ekivalen per-fasa motor induksi dengan bagian rangkaian rotor dinyatakan terhadap sisi stator
(a) dengan tahanan konstan s R2'
(a)
(b)
(b) dengan tahanan variabel 1 1)
'(
2 −
R s
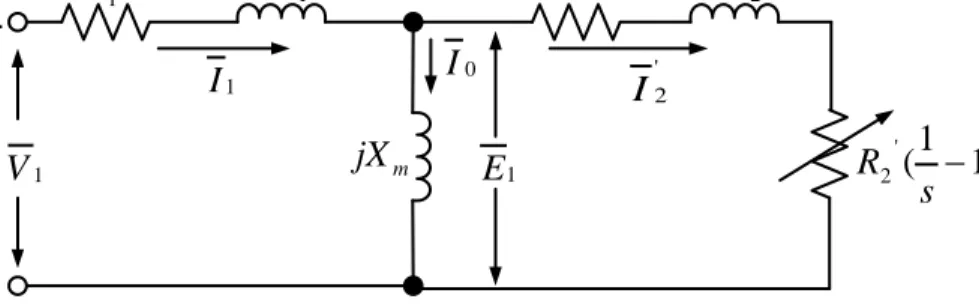
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi inti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari rangkaian ekivalen motor induksi. Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi inti yang konstan harus diikut-sertakan dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta (stray-load losses) dan angin. Dengan penyederhanaan ini, maka dapat digambar rangkaian ekivalen baru (gambar 2.11) seperti berikut ini.
I0
I1
) 1 1
'(
2 −
R s
2
R'
V1 E1
R1 jX1 jX2'
jXm
'
I2
+
-
Gambar 2.11. Rangkaian ekivalen per-fasa motor induksi tanpa rugi inti
2.7 Analisis Rangkaian ekivalen
Semua karakteristik kinerja motor induksi tiga fasa dapat ditentukan dari rangkaian ekivalennya. Dalam menganalisis rangkaian ekivalen sebuah transformator, bagian parallel dari rangkaian yang terdiri dari Re dan XØ dapat diabaikan atau menggeser bagian parallel tersebut ke arah terminal primer. Namun cara ini tidak diijinkan dalam menganalisis rangkaian ekivalen motor induksi. Hal ini dikarenakan kenyataan bahwa arus penguatan pada transformator berkisar antara 2% sampai 6%
dari arus beban penuh dan juga reaktansi bocor primer per unitnya juga sangat kecil.
Sedangkan pada motor induksi, arus penguatan berkisar antara 30% sampai 50% dari
(2.15)
(2.16)
(2.17) arus beban penuh dan juga reaktansi bocor primer per unit cukup besar. Oleh sebab itu, apabila komponen parallel rangkaian ekivalen motor induksi diabaikan maka akan terdapat kesalahan yang besar dalam hal perhitungan daya dan torsi motor induksi.
Im
I1
V1 E1
s R2'
R1 jX1 '
jX2
jXm
''
I2
+
-
Gambar 2.12. Rangkaian ekivalen motor induksi
Dari gambar rangkaian ekivalen diatas, arus stator dan rotor juga impedansi dapat ditentukan seperti berikut.
+
=
Dari nilai arus stator dan rotor di atas maka daya celah udara dan torsi internal per fasa dapat ditentukan. Daya celah udara adalah daya yang ditransfer dari stator ke rotor sepanjang celah udara. Daya celah udara Pg dapat dituliskan seperti berikut.
21
(2.18)
(2.19)
(2.20)
(2.21)
Pg = rugi ohmic rotor + daya mekanik internal yang dibangkitkan di rotor (Pm)
Pg = s Pg + (1-s) Pg
Sedangkan torsi internal yang dibangkitkan per fasa adalah :
=
2.8 Penentuan Parameter Rangkaian Ekivalen Motor Induksi
Parameter rangkaian ekivalen motor induksi dapat ditentukan dari percobaan beban nol, percobaan rotor tertahan (blocked rotor), dan percobaan tahanan dc belitan stator. Salah satu tujuan penentuan parameter motor induksi adalah untuk menguji kebenaran data – data yang ada pada name plate motor induksi tersebut.
(a). Percobaan beban nol. Tujuan percobaan beban nol adalah untuk memperoleh nilai rugi inti, rugi rotasional dan menentukan parameter Xm. Pada percobaan ini, motor induksi dioperasikan memeikul beban nol pada rating tegangan dan frekuensinya. Besar tegangan yang disuplai pada belitan stator per fasa adalah Vn1, arus input In1, dan daya input Pn1. Nilai ini dapat dilihat pada alat ukur pada saat melakukan percobaan beban nol.
(2.22)
(2.23)
(2.24) Kecepatan rotor motor induksi pada saat memikul beban nol mendekati atau hampir sama besar dengan kecepatan sinkronnya. Oleh sebab itu, slip (snl) motor induksi pada saat beban nol adalah sangat kecil atau mendekati nol, sehingga nilai sangat
besar bila dibandingkan dengan XØ . pada keadaan ini arus yang mengalir ke rotor sangat kecil. Dari pernyataan di atas, rangkaian ekivalen motor induksi pada saat memikul beban nol adalah sebagai berikut.
V n jXm
I n
+
jX1
R1
Gambar 2.13 rangkaian ekivalen motor induksi beban nol
Dari gambar 2.12 di atas, reaktansi beban nol Xnl dilihat dari terminal stator adalah :
Xnl = X1 + Xm
Impedansi stator beban nol dapat ditentukan dari pembacaan alat ukur pada saat percabaan beban nol.
Dan tahanan stator beban nol adalah :
Maka,
(2.25)
(2.26)
(2.27) Sedangkan rugi – rugi putaran PR biasanya dapat dianggap konstan dan dapat ditentukan dari persamaan berikut :
m adalah jumlah fasa stator dan r1 adalah tahanan stator per fasanya.
(b). Percobaan rotor tertahan. Tujuan percobaan rotor tertahan adalah untuk menentukan nilai impedansi bocor. Pada percobaan ini poros rotor dipaksa untuk tidak berputar dimana terminal stator terhubung sumber tegangan seimbang sesuai ratingnya. Nilai tegangan per fasa Vbr, arus masukan Ibr, dan daya masukan Pbr didapat dengan melihat alat ukur pada saat melakukan percobaan rotor tertahan. Rangkaian ekivalen motor induksi pada percobaan rotor tertahan adalah sebagai berikut :
Ibr
Vbr r2
R1 jX1 jX2
jXm
+
-
Gambar 2.14 rangkaian ekivalen motor induksi rotor tertahan
Dari pembacaan alat ukur pada saat percobaan, dapat ditentukan parameter motor induksi sebagai berikut :
Impedansi rotor tertahan,
(2.28)
(2.29)
(2.30) Dan tahanan rotor tertahan,
Reaktansi rotor tertahan,
(c). Percobaan DC. Percobaan dc dilakukan untuk memperoleh nilai R1 yaitu dengan menghubungkan sumber tegangan dc (Vdc) pada dua terminal input kemudian arus dc nya diukur. Pada kondisi ini arus tidak mengali pada rotor karena tidak ada arus yang terinduksi pada rotor.
Kemudian dari pembacaan alat ukur selama melakukan percobaan dapat diperoleh:
Gambar 2.15 Rangkaian percobaan dc
(2.31) 2.9 Aliran Daya dan Efisiensi Motor Induksi
2.9.1 Aliran Daya
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor.
Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
Pin =3 IV1 1cosθ ( Watt )
dimana :
V1 = tegangan sumber perfasa (Volt)
I1 = arus masukan perfasa (Ampere)
θ = sudut phasa antara arus masukan dengan tegangan sumber.
Daya listrik yang diinputkan pada terminal stator kemudian diubah menjadi daya mekanik pada poros rotor. Namun selama proses konversi energy listrik menjadi energy gerak terdapat berbagai rugi – rugi yang terjadi pada belitan, inti magnet, dan lain – lain.
Rugi – rugi tersebut antara lain :
1. Rugi – rugi tetap, terdiri dari : a) Rugi inti stator, (watt)
b) Rugi gesek dan angin.
2. Rugi – rugi variable, terdiri dari :
a) Rugi tembaga stator (Pts), (watt) b) Rugi tembaga rotor (Ptr), (watt)
(2.32)
(2.33) Apabila daya yang disuplai pada terminal stator dikurangi dengan rugi – rugi tembaga dan rugi – rugi inti, maka akan diperoleh besar daya listrik yang diubah menjadi daya mekanik pada poros rotor.
Pmek = Pin – Pi – Pts – Ptr (watt)
Gambar berikut menunjukkan aliran daya pada motor induksi tiga fasa.
Gambar 2.16 Aliran daya motor induksi
2.9.2 Efisiensi
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan antara daya keluaran dan daya masukan. yang dapat dirumuskan seperti berikut :
in loses in
loses in
in out
p p p
p p p
p − = −
=
= 1
η
Bila dinyatakan dalam persen, maka :
%
×100
=
in out
p η p
Dari persamaan terlihat bahwa efisiensi motor bergantung pada besar rugi-ruginya.
Rugi-rugi pada persamaan tersebut adalah penjumlahan keseluruhan komponen rugi- rugi yang dibahas pada sub bab sebelumnya, yaitu :
Ploses = Pts + Ptr + Pi + Pa&g
Dimana :
Pts = Rugi tembaga stator
Ptr = Rugi tembaga rotor
Pi = Rugi inti stator
Pa&g = Rugi gesek dan angin
Pada motor induksi pengukuran efisiensi motor induksi ini dapat dilakukan dengan beberapa cara seperti:
- Mengukur daya listrik masukan dan daya mekanik keluaran.
- Mengukur seluruh rugi-rugi dan daya masukan.