BAB III
PARAMETER DAN TORSI MOTOR INDUKSI TIGA FASA
3.1. Parameter Motor Induksi Tiga Fasa
Parameter rangkaian ekivalen dapat dicari dengan melakukan pengukuran pada percobaan tahanan DC, percobaan beban nol, dan percobaan rotor tertahan ( block- rotor). Dengan penyelidikan pada setiap rangkaian ekivalen, percobaan beban nol motor induksi dapat disimulasikan dengan memaksimalkan tahanan
rotor s R
'2. Hal ini bisa terjadi pada keadaan normal jika slip dalam nilai yang minimum. Slip yang mendekati nol terjadi ketika tidak ada beban mekanis, dan mesin dikatakan dalam keadaan berbeban ringan.
Pengukuran rotor tertahan dilakukan dengan menahan rotor tetap diam.
Pada kondisi ini slip bernilai satu yang merupakan nilai slip tertinggi untuk
kondisi motor, jadi nilai s R
'2bernilai minimum. Untuk menentukan bentuk rangkaian ekivalen, pola fluksi dianggap sinusoidal, demikian juga rugi-rugi yang diukur proporsional terhadap fluksi utama, dan kejenuhan diabaikan
3.1.1 Percobaan DC
Untuk memperoleh harga R dilakukan dengan pengukuran DC yaitu
1dengan menghubungkan sumber tegangan DC (V
DC) pada dua terminal input dan
arus DC-nya (I
DC) lalu diukur. Di sini tidak mengalir arus rotor karena tidak ada tegangan yang terinduksi.
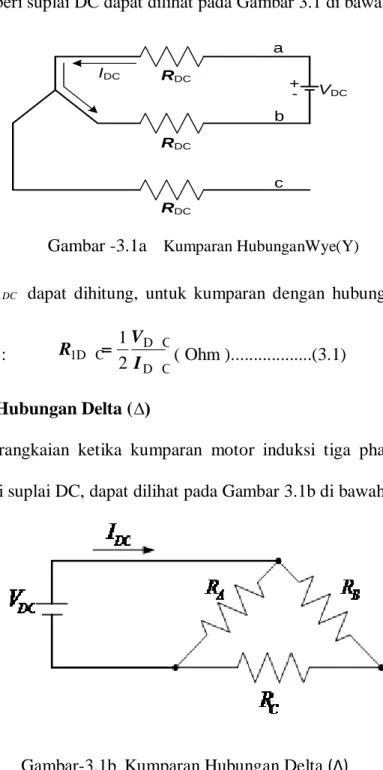
1. Kumparan hubungan Wye (Y)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung Y, dan diberi suplai DC dapat dilihat pada Gambar 3.1 di bawah ini.
a
b
c RDC
RDC
RDC
VDC
+- IDC
Gambar -3.1a
Kumparan HubunganWye(Y)Harga R
1DCdapat dihitung, untuk kumparan dengan hubungan Y, adalah
sebagai berikut :
D C D C D C
1
2
1
IR
=
V( Ohm )...(3.1)
2. Kumparan Hubungan Delta ( ∆)
Gambar rangkaian ketika kumparan motor induksi tiga phasa terhubung delta dan diberi suplai DC, dapat dilihat pada Gambar 3.1b di bawah ini.
Gambar-3.1b Kumparan Hubungan Delta (∆)
Diketahui bahwa tahanan pada kumparan pada masing – masing phasa dianggap sama, maka R
A= R
B= R
C= R .
Jadi gambar diatas dapat disederhanakan menjadi gambar berikut.
R
AR
PV
D CI
D CIA
Dimana R =
PR
B+ R
CJadi R =
A A DCI V
Dimana
P A
P
D C
A
R R
I R
I = × +
IA ID C
3
= 2
, maka
R
1dc=
DC DC
I V
23
=
DC DC
I
× V 2 3
Harga R
1ini dinaikkan dengan faktor pengali 1,1-1,5 untuk operasi arus bolak- balik, karena pada operasi arus bolak-balik resistansi konduktor meningkat karena distribusi arus yang tidak merata akibat efek kulit dan medan magnet yang melintasi alur.
dc
ac
k R
R
1= ×
1( Ohm )...(3.2)
Dimana k = faktor pengali, besarnya 1,1 – 1,5
Karena besar tahanan konduktor stator dipengaruhi oleh suhu, dan biasanya bila rugi-rugi motor ditentukan dengan pengukuran langsung pada motor, maka untuk mengetahui nilai tahanan yang paling mendekati, biasanya dilakukan dengan beberapa kali pengukuran dan mengambil besar rata-rata dari semua pengukuran yang dilakukan.
3.1.2 Percobaan Beban Nol
Motor induksi dalam keadaan beban nol dibuat dalam keadaan berputar tanpa memikul beban pada rating tegangan dan frekuensinya. Besar tegangan yang digunakan ke belitan stator perphasanya adalah V ( tegangan nominal), arus
1masukan sebesar I dan dayanya
0P . Nilai ini semua didapat dengan melihat alat
0ukur pada saat percobaan beban nol.
Dalam percobaan beban nol, kecepatan motor induksi mendekati
kecepatan sinkronnya. Dimana besar s 0, sehingga
s R2' ~ sehingga besar
impedansi total bernilai tak berhingga yang menyebabkan arus
I'2pada Gambar 3.2 bernilai nol sehingga rangkaian ekivalen motor induksi pada pengukuran beban nol ditunjukkan pada Gambar 3.3. Namun karena pada umumnya nilai kecepatan motor pada pengukuran ini n yang diperoleh tidak sama dengan n
r0 smaka slip tidak sama dengan nol sehingga ada arus I
2’yang sangat kecil mengalir
pada rangkaian rotor, arus
I'2tidak diabaikan tetapi digunakan untuk menghitung
rugi – rugi gesek + angin dan rugi – rugi inti pada percobaan beban nol. Pada
pengukuran ini didapat data-data antara lain : arus input (I
1= I ), tegangan input
0(V
1= V ), daya input perphasa (P
0 0) dan kecepatan poros motor ( n ). Frekuensi
r0yang digunakan untuk eksitasi adalah frekuensi sumber f, maka rangkaian pada saat beban nol adalah sepeti pada gambar di bawah ini.
Iφ
Zm
V1
I1 = Iφ
Im
Ic
Rc
jX1
R1
Xm
s R'2 2
X'
Gambar- 3.2
Rangkaian Ekivalen pada Saat Beban NolDengan tidak adanya beban mekanis yang terhubung ke rotor dan tegangan normal diberikan ke terminal, dari Gambar 3.2 didapat besar sudut phasa antara arus antara I dan
0V adalah :
0
=
−
0 0 1 0
0
V I
C o s P
θ ...(3.3)
Dimana: P
0= P
n l= daya saat beban nol perphasa
1
0
V
V = = tegangan masukan saat beban nol
=
= I
n lI
0arus beban nol
dengan P
0adalah daya input perphasa. Sehingga besar E
1dapat dinyatakan dengan
E1=V1∠0o −(Iϕ∠θ0) R1(+ j 1X)
(Volt )...(3.4)
n adalah kecepatan rotor pada saat beban nol. Daya yang didissipasikan oleh R
ro cdinyatakan dengan :
1 2 0 0
c P I R
P = −
( Watt )...(3.5) R didapat pada saat percobaan dengan tegangan DC.
1Harga R
cdapat ditentukan dengan
0 2 1
c
P
R = E (Ohm )...(3.6)
Dalam keadaan yang sebenarnya R lebih kecil jika dibandingkan dengan
1X
mdan juga R jauh lebih besar dari
cX , sehingga impedansi yang didapat dari
mpercobaan beban nol dianggap jX dan
1jX yang diserikan.
mZ
nl= 3
1
I
nlV
≅j ( X
1+ X
m) ( Ohm )...(3.7)
Sehingga didapat
1 1
3 X
I X V
n l
m
= − ( ohm )...(3.8)
3.1.3 Percobaan Rotor Tertahan
Pada pengukuran ini rotor dipaksa tidak berputar ( n = 0, sehingga s = 1)
rdan kumparan stator dihubungkan dengan tegangan seimbang. Karena slip s = 1,
maka pada Gambar 3.2, harga
'2'
2
R
R = s . Karena
R2'+
j X2'< <
Rc j Xmmaka arus yang melewati
Rc jXmdapat diabaikan.
Sehingga rangkaian ekivalen motor induksi dalam keadaan rotor tertahan atau hubung singkat seperti ditunjukkan pada gambar 3.3
jX1+jX’2
R1 + R’2
V1
I1
Gambar- 3.3
Rangkaian Ekivalen Pada Saat Rotor Tertahan (s = 1)Impedansi perphasa pada saat rotor tertahan ( Z
BR) dapat dirumuskan sebagai berikut:
B
B R
' 2 1 '
2 1
B
R
RR j ( X X ) R j X
Z = + + + = + ( Ohm )...(3.9)
Pengukuran ini dilakukan pada arus mendekati arus rating motor. Data hasil pengukuran ini meliputi : arus input (I
1= I
BR), tegangan input (V
1= V ) dan
BRdaya input perphasa ( P = P
BR in). Karena adanya distribusi arus yang tidak merata
pada batang rotor akibat efek kulit, harga
R menjadi tergantung frekuensi. Maka 2'umumnya dalam praktek, pengukuran rotor tertahan dilakukan dengan mengurangi frekuensi eksitasi menjadi f
BRuntuk mendapatkan harga
R yang 2'sesuai dengan frekuensi rotor pada saat slip rating. Dari data-data tersebut, harga
R
BRdan X
BRdapat dihitung :
21 B R
B R
I
R = P (Ohm )...(3.10)
R
B R= R
1+ R
2'(Ohm )...(3.11)
B R B R
B R
I
Z = V (Ohm )...(3.12)
B2 R
2
B R
B R Z R
X = −
(Ohm )...(3.13)
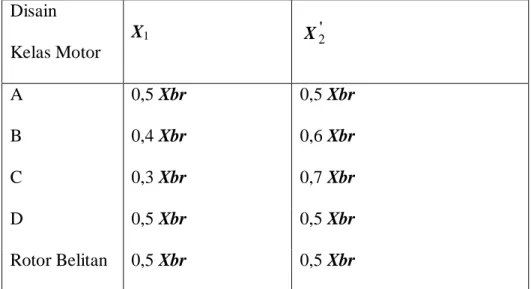
Untuk menentukan harga X
1dan X
2digunakan metode empiris berdasarkan IEEE standar 112. hubungan X
1dan X
2terhadap Xbr dapat dilihat pada Tabel 2.1
Tabel 2.1 Distribusi Empiris dari Xbr
Disain
Kelas Motor
X1 '
X 2
A 0,5 Xbr 0,5 Xbr
B 0,4 Xbr 0,6 Xbr
C 0,3 Xbr 0,7 Xbr
D 0,5 Xbr 0,5 Xbr
Rotor Belitan 0,5 Xbr 0,5 Xbr
di sini besar X
BRharus disesuaikan dahulu dengan frekuensi rating f.
'B R f XB R X f
B R
=
(Ohm )...(3.14)
1 '2
'
X X
X
B R= − (Ohm )...(3.15)
3.2 Torsi Motor Induksi Tiga Fasa
Suatu persamaan torsi pada motor induksi dapat dihasilkan dengan bantuan teori rangakaian thevenin. Dalam bentuk umumnya, teorema thevenin mengijinkan penggantian sembarang jaringan yang terdiri atas unsur – unsur rangkaian linier dan sumber tegangan fasor tetap. Rangkaian rotor direfrensikan terhadap stator. Misalkan V tegangan input motor, dengan melihat dari sisi
1terminal a-b, dapat dicari tegangan theveninnya. Perhatikan gambar berikut ini.
Gambar-3.4
Untuk mempermudah perhitungan maka pada gambar -3.4 terminal a-b dibuka.
Perhatikan gambar berikut.
Gambar-3.5
Dari gambar – 3.5 dapat dihitung tegangan thevenin ( V )
ThV =
ThV
1
+
+ (
1)
1 m
m
X X j R
j X
( Volt )………...(3.16)
Z =
ThR +
ejX =
e) (
) (
1 1
1 1
m m
X X j R
j X R j X
+ +
+
(Ohm )…………...(3.17)
Rangkaian ekivalen pada gambar – 3.5 berubah menjadi seperti pada gambar – 3.7 berikut.
Gambar-3.6 Dengan demikian I dapat dihitung dengan persamaan
22
I'
=
)
( '2
2 '
X X s j
R R
V
e e
T h
+ +
+
( Ampere )………(3.18)
Torsi ( T
d) dapat juga dihitung dengan persamaan
T
d=
s
P
gω = s
I R
s
'2 2 2
3
'ω 1 × (Nm)………...(3.19)
subsitusikan persamaan (3.18) di atas ke persamaan (3.19), maka didapat
T
d=
+
'2 2+ +
'2 2 2' 2
) (
) (
) 3 (
X s X
R R
s V R
e e
T h
ω
s( Nm )…………...(3.20)
pada keadaan motor bekerja normal, rotor berputar pada arah putaran medan magnetik yang dihasilkan oleh arus stator, kecepatannya diantara nol sampai kecepatan serempak, dan slipnya diantara nol dengan satu. Lihat gambar – 3.7 berikut
Gambar-3.7
Kurva Daerah Motor dan GeneratorUntuk mendapatkan mesin induksi yang bekerja sebagai generator, maka
terminal stator dihubungkan pada suatu sumber tegangan dengan frekuensi tetap
dan rotornya digerakkan diatas kecepatan serempak dengan suatu penggerak
mula, seperti pada gambar diatas. Sumber tersebut menjaga supaya kecepatan serempak tetap dan mencatu masukan daya reaktif yang diperlukan untuk meneral medan magnetis celah udara. Karenanya slip berharga negatif.
3.2.1 Torsi Awal ( Torsi Start )
Pada saat pengasutan, ketika motor dalam keadaan diam, besar slip adalah satu, dan daya mekanis bernilai nol, torsi pengasutan didapat dengan mensubstitusikan besar s =1 ke persamaan (3.20), maka di dapat
T
start= [
'2 2 2 '2 2]
2 '
) (
) (
3
X X R
R
R V
e e
T h
s + + +
ω (Nm)…………..………...…(3.21)
Pada motor induksi tiga phasa rotor belitan torsi awal perlu diperbesar apabila torsi beban lebih besar dari torsi awal,maka untuk menggerakkan beban maka torsi awal perlu diperbesar.Torsi awal ( torsi start ) τ
startbesarnya dapat diatur ( diubah ) besarnya dengan menggunakan tahanan variabel dari luar (R
luar) yang dihubungkan secara seri ke kumparan rotor melalui sikat ( pada motor induksi tiga fasa rotor belitan ),
T
start= [
'2 2 2 '2 2]
2 '
) (
) (
) 3 (
X X Rluar
R R
Rluar R
V
e e
Th
s + + + +
+
ω (Nm)...(3.22)
3.2.2 Torsi Maksimum
Dari persamaan (3.19), torsi maksimum terjadi ketika daya celah udara bernilai maksimum. Karena daya celah udara sebanding dengan daya yang terpakai pada tahanan R
2’/s, maka torsi induksi maksimum terjadi ketika daya
yang dikonsumsi tahanan tersebut maksimum. Dengan berperinsip pada penyesuian impedansi dalamteori rangkaian, daya tersebut akan merupakan yang
terbesar bila impedansi s R
'2sama dengan besar impedansi diantaranya dan
tegangan V , atau pada harga
Ths
τmaxslip yang mempunyai hubungan
(
e 2' 2)
2 e max
2 '
) ( X X s R
R
T
+ +
= ...(3.23)
Untuk motor tiga fasa rotor belitan
= (
e 2' 2)
2
e
( X X )
R + + (Nm)...(3.24)
Dari sini didapat besar slip pada saat torsi maksimum s
τmaxadalah
(
e 2' 2)
2 e
2 '
max R (X X )
sT R
+
= +
...(3.25) Untuk motor tiga fasa rotor belitan
(
e 2' 2)
2 e
2 '
max R (X X )
R
sT R luar
+ +
= +
...(3.26)
Besar torsi maksimum didapat dengan mensubstitusikan slip pada torsi maksimum pada persamaan (3.23). Persamaan besar torsi maksimumnya didapat
Tmaks = 2
ω
s[
Re+ R3e2V+th2(Xe +X2')2] (Nm)...(3.27)
Untuk motor tiga fasa rotor belitan
[ e 2' 2]
2 e e s
2 th
maks 2 ( )
3
X X R R T V
+ +
= +
ω (Nm)...(3.28)
Persamaan (3.25) dan (3.26) menunjukkan bahwa slip yang terjadi saat torsi maksimum sangat bergantung pada besarnya harga R dan R
2' luar, tetapi pada persamaan (3.27) dan (3.28) yang mana persamaan ini mengindikasikan bahwa torsi maksimum T
maxtidak ada hubungan dengan R . Maksud dari hal ini bahwa
2'jika R ditambah besarnya dengan menggunakan tahanan luar yang terhubung
2'seri dengan kumparan rotor pada motor induksi jenis rotor belitan ( R
luar) , besar torsi maksimum yang dihasilkan tidak berpengaruh tetapi berpengaruh hanya pada nilai slip dimana terjadi torsi maksimum.
Sekarang yang berpengaruh terhadap torsi maksimum adalah tegangan masukan pada kumparan stator V ,
1R yang sebanding dengan tahanan pada
ekumparan stator ( R ) , induktansi pada kumparan rotor (
1X ) dan
2'X yang
emana sebanding dengan induktansi kumparan stator ( X ). Dalam tinjauan yang
1sebenarnya, persamaan (3.24) menunjukkan bahwa:
1. T
maxsebanding dengan besar tegangan masuk ( input ) pada stator.
2. T
maxdipengaruhi oleh besarnya tahanan stator ( R ).
13. T
maxdipengaruhi oleh dua induktansi, yaitu induktansi pada kumparan
stator ( X ) dan induktansi pada kumparan rotor (
1X ).
2'Hubungan antara torsi dan slip untuk motor induksi dengan adanya penambahan tahanan luar pada belitan rotor ditunjukkan oleh gambar berikut.
Untuk kurva torsi beban seperti yang ada pada gambar, dengan kecepatan n pada
1tahanan rotor sebesar r , kecepatan yang dihasilkan
2n pada tahanan rotor
2r .
2'Dimana r >
2'r dan seterusnya.
2Dan T
1<T
2<T
3...dan seterusnya
Gambar-3.9 Hubungan Antara Torsi dan Slip Dimana ( R
2>R
2’>R
2’’>R
2’’’) Dari gambar diatas, kita dapat menyimpulkan untuk motor induksi rotor belitan bahwa:
1. kecepatan motor dapat diatur dengan variasi tahanan rotor tetapi torsi maksimum tidak dapat dipengaruhi.
2. torsi awal motor induksi dipebesar dengan menambah tahanan rotor.
3. Penambahan tahanan luar mengkibatkan torsi maksimum semakin cepat diperoleh.
4. arus awal dapat diperkecil dengan mengubah – ubah tahan rotor.
5. faktor daya motor pada saat start dapat diperbaiki dengan tahanan rotor.
6. Torsi maksimum terjadi pada slip yang berbeda-beda.
3.2.3 Torsi Beban Penuh
Telah diketahui bahwa persamaan untuk mendapatkan nilai dari torsi yaitu
T
d=
+
'2 2+ +
'2 2 2' 2
) (
) (
) 3 (
X s X
R R
s V R
e e
T h
ω
s(Nm)………(3.29)
Pada saat motor berbeban penuh ( full-load ), motor berputar dengan kecepatan
nrfl( kecepatan dengan beban penuh ). Maka akan dihasilkan slip pada beban penuh (
sfl) sebesar
sfl
=
s rfl s
n n n −
Dengan menggunakan persamaan (3.29) dimana s digantikan dengan
sfl, maka didapat torsi pada saat beban penuh ( τ
fl) sebesar
Tfl =
+
'2 2+ +
'2 2 2' 2
) (
) (
) ( 3
X s X
R R
s V R
e f l
e
f l T h
ω
s(Nm)……….………(3.30)
Di bawah ini gambar kurva karva karakteristik torsi- kecepatan motor induksi
100 200 300
20 40 60 80 100
Torsi Maksimum
Kecepatan
beban penuh Kecepatan sinkron Torsi
beban penuh Torsi start
Kecepatan (% Kecepatan sinkron)
Torsi (% Torsi beban penuh)
0
Torsi beban nol
Gambar- 3.10 Kurva Karakteristik Torsi-Kecepatan Motor Induksi
Kurva torsi kecepatan tipikal motor induksi ditunjukkan pada Gambar 3.9 Karakteristik penting yang terdapat dalam kurva tersebut adalah kurva Torsi- Kecepatan. Dari gambar tersebut dapat dijabarkan :
5. Jangkauan motor meliputi slip yang berada di 0<s<1. Kecepatan putaran antara diam (s = 1) sampai kecepatan sinkron (s = 0), dan putaran memiliki arah yang sama dengan putaran medan magnetik. Mesin menjadi motor ditandai dengan daya mekanis keluaran yang bernilai positif.
6. Kurva torsi-kecepatan hampir mendekati linier antara keadaan beban nol dengan keadaan beban penuh. Pada daerah ini tahanan rotor jauh lebih besar dibanding reaktansi rotor, sehingga arus rotor, medan magnetik rotor, dan torsi meningkat linier seiring dengan naiknya slip.
7. Ada titik maksimum torsi yang terjadi ketika kenaikan putaran tidak lagi menaikkan besar torsi. Titik ini disebut sebagai titik torsi maksimum yang mampu dihasilkan motor.
8. Torsi pengasutan motor lebih besar dibanding torsi beban penuh motor
3.3 Disain Motor Induksi Tiga Fasa
Motor asinkron yang sering kita temukan sehari-hari misalnya adalah : kipas angin, mesin pendingin, kereta api listrik gantung, dan lain sebagainya.
Untuk itu perlu diketahui kelas-kelas dari motor tersebut untuk mengetahui unjuk kerja dari motor tersebut. Adapun kelas-kelas tersebut adalah sebagai berikut :
4. Kelas A : Torsi start normal, arus start normal dan slip kecil
Tipe ini umumnya memiliki tahanan rotor sangkar yang rendah. Slip pada beban penuh kecil atau rendah namun efisiensinya tinggi. Torsi maksimum biasanya sekitar 21% dari torsi beban penuh dan slipnya kurang dari 21%.
Motor kelas ini berkisar hingga 20 Hp.
5. Kelas B : Torsi start normal, arus start kecil dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A tetapi arus startnya berkisar 75%I
fl. Slip dan efisiensi pada beban penuh juga baik. Kelas ini umumnya berkisar antara 7,5 Hp sampai dengan 200 Hp. Penggunaan motor ini antara lain : kipas angin, boiler, pompa dan lainnya.
6. Kelas C : Torsi start tinggi dan arus start kecil
Kelas ini memiliki resistansi rotor sangkar yang ganda yang lebih besar dibandingkan dengan kelas B. Oleh sebab itu dihasilkan torsi start yang lebih tinggi pada arus start yang rendah, namun bekerja pada efisisensi dan slip yang rendah dibandingkan kelas A dan B.
7. Kelas D : Tosi start tinggi, slip tinggi
Kelas ini biasanya memiliki resistansi rotor sangkar tunggal yang tinggi
sehingga dihasilkan torsi start yang tinggi pada arus start yang rendah
BAB IV
PERHITUNGAN PARAMETER DAN PENGGUNAAN TAHANAN LUAR UNTUK MEMPERBESAR TORSI AWAL MOTOR INDUKSI TIGA FASA
ROTOR BELITAN
4.1 Umum
Untuk mendapatkan parameter dari rangkaian ekivalen motor induksi tiga fasa, maka dapat dihitung dari data yang didapat dari percobaan beban nol, rotor tertahan ( block rotor ), dan percobaan tahanan DC. Pada percobaan beban nol dimana tidak ada beban yang terhubung pada poros rotor sehingga putaran rotor dikatakan maksimum. Percobaan rotor tertahan ( block rotor ) harus dilakukan jauh dibawah keadaan nominal, karena dengan tegangan stator yang kecil sudah menghasilkan arus yang besar pada rotor. Dipercobaan rotor tertahan putaran rotor dikatakan dalam keadan minimum ( n = 0 ). Untuk percobaan tahanan DC dimana
rpada percobaan ini akan mengukur besarnya tahanan DC pada kumparan motor.
Percobaan penggunaan tahanan luar untuk mendapatkan torsi awal yang
besar dilakukan untuk mendapatkan nilai torsi awal yang berubah nilainya akibat
bertambahnya tahanan rotor. Adakalanya suatu motor induksi tiga fasa dibebani
dengan suatu beban, dimana torsi beban yang dipikul lebih besar dari torsi awal
yang dihasilkan oleh motor induksi, untuk menanggulangi masalah ini maka pada
motor induksi tiga fasa rotor belitan ditambahkan tahanan luar yang diserikan
dengan belitan rotor melalui sikat untuk memperbesar torsi awal dan memperkecil
arus awal. Data yang didapat dari percobaan penggunaan tahanan luar terhadap
torsi awal yang dihasilkan akan dibandingkan dengan besar torsi dan arus hasil dari perhitungan.
4.2. Peralatan Yang Digunakan 1. motor induksi tiga fasa
tipe : rotor belitan
spesifikasi motor: - AEG Typ C AM 112MU 4RI - ∆/Y 220/380 V 10,7 / 6,2 A - 2,2 Kw, cosφ 0,67
- 1410 rpm, 50 Hz -Kelas B
2. Amperemeter 3. Volt Meter 4. Tahanan Geser 5. Watt Meter 3φ
6. sumber tegangan AC dan DC
4.3 Percobaan Untuk Mendapatkan Parameter – Parameter Motor Induksi Tiga Fasa
Untuk dapat menentukan parameter motor induksi tiga fasa jenis rotor belitan,
maka dapat dilakukan dengan percobaan berikut ini:
4.3.1 Percobaan Tahanan DC
4.3.1.1 Percobaan Tahanan DC Pada Belitan Stator 1. Rangkaian Percobaan
Gambar – 4.1 Rangkaian Percobaan Tahanan DC pada Stator 2. Prosedur Percobaan
1. Hubungkan belitan stator dengan hubungan Y dan yang akan diukur adalah dua dari ketiga tahanan belitan stator.
2. Belitan stator dihubungkan dengan suplai tegangan DC 3. Tegangan DC dinaikkan sampai pada nilai tertentu.
4. Ketika tegangan menunjukkan pada besaran 13,6 Volt, nilai voltmeter dan amperemeter dicatat
5. Pecobaan selesai,rangkaian dilepas.
3. Data Hasil Percobaan R
u=R
v=R
w=R
1dcPhasa V(volt) I(Ampere)
U-V 13,6 4,3
U-W 13,6 4,3
V-W 13,6 4,3
4.3.1.2 Percobaan Tahanan DC pada Belitan Rotor 1. Rangnkaian Percobaan
Gambar – 4.2. gambar percobaan tahanan DC pada Rotor
2. Prosedur Percobaan
1. Hubungkan belitan rotor dengan hubungan Y dan yang akan diukur adalah dua dari ketiga tahanan belitan rotor..
2. Belitan rotor dihubungkan dengan suplai tegangan DC
3. Tegangan DC dinaikkan sampai pada nilai tertentu
4. Ketika tegangan menunjukkan pada besaran 4,0 Volt, nilai voltmeter dan amperemeter dicatat
5. Pecobaan selesai,rangkaian dilepas
3. Data Hasil Percobaan R
k=R
l=R
m=R
2dcPhasa V(volt) I(Ampere)
K-M 4,0 5,4
K-L 4,0 5,4
L-M 4,0 5,4
4.3.2 Percobaan Rotor Tertahan ( Block Rotor ) 1. Rangkaian Percobaan
Dari data pengukuran motor dalam keadaan rotor tertahan atau hubung singkat dapat dihitung X
1dan X
2'.
Gambar – 4.3. gambar rangkaian percobaan rotor tertahan
2. Prosedur Percobaan
Prosedur yang dilakukan untuk memperoleh data hubung singkat adalah : 1. Motor induksi dikopel dengan mesin DC
2. Semua switch dalam keadaan terbuka, pengatur tegangan dalam kondisi nol.
3. Switch S
1ditutup, PTAC
1dinaikkan sehingga motor induksi mulai berputar.
4. Switch S
3kemudian ditutup, PTDC
1dinaikkan sampai penunjukan amperemeter A
3mencapai harga arus penguat nominal mesin arus searah
5. Catat harga V
2, kemudian naikkan teganganV
3sampai V
3=V
26. Switch S
2ditutup dan PTDC
2dinaikkan sehingga mesin arus searah memblok putaran motor induksi dan putaran berhenti.
3. Data Hasil Percobaan Rotor Tertahan
V ( Volt )
BRI
BR( Ampere ) P ( Watt )
BR94 6,1 550
4.3.2 Percobaan Beban Nol 1. Rangkaian percobaan
Gambar 4.4 Rangkaian Percobaan Beban Nol
2. Prosedur Percobaan
1. Semua switch terbuka, tegangan pada posisi minimum
2. Switch S
1kemudian ditutup, PTAC
1dinaikkan perlahan sampai tegangan 370 Volt.
3. Ketika tegangan 370 Volt, nilai amperemeter masing masing phasa dan wattmeter dicatat
4. Percobaan selesai
3. Data Hasil Percobaan
V ( Volt )
0P ( watt )
0I (Ampere)
0370 325 3,45
4.4 Percobaan Penggunaan Tahanan Luar Untuk Mendapatkan Torsi Awal yang Besar
1. Rangkaian Percobaan
Gambar-4.5 Rangkaian Percobaan
2. Prosedur Percobaan
1. Rangkai rangkaian percobaan seperti gambar di atas.
2. tahanan luar dibuat dalam hubungan Y.
3. hubungkan tahanan luar ke terminal rotor.
4. tutup saklar S1 yang menghubungkan PTAC1 dengan terminal stator motor.
5. tutup switch S
2dan S
3.
6. tahanan luar buat pada harga 0 Ohm.
7. PTDC1 dan PTDC2 dinaikkan tegangannya sampai pada nilai tertentu.
8. naikan tegangan PTAC1 sampai pada tegangan 360 Volt.
9. pada saat tegangan dinaikkan maka catat arus dan torsi awalnya.
10. setelah itu turunkan tegangan , nikkan tahanan luar menjadi 1 Ohm.
11. naikkan kembali tegangan PTAC1, catat torsi dan arus awal yang dihasilkan.
12. lakukan kembali prosedur itu untuk harga tahanan luar 2,3,4,5,dan 6 Ω 13. percobaan selesai.
3. Data Hasil Percobaan
Data Percobaan Pengaruh Penambahan Tahanan Luar Terhadap Torsi Awal V
1= 370 Volt
R
Luar( Ohm ) τ
AWAL( Nm ) I
Rotor( Ampere )
I
Stator( Ampere )
0 3,19 25,6 16,7
1 3,48 22,7 13,3
2 4,35 21,3 10,9
3 5,64 19,8 8,3
4 8,75 18,2 6,2
5 11,22 17,5 5,8
6 13,98 16,1 4,9
4.5 Percobaan Pengaruh Tahanan Luar Terhadap Torsi dan Kecepatan 1. Rangkaian Percobaan
Gambar-4.6 Rangkaian Percobaan 2. Prosedur Percobaan
1. Rangkailah rangkaian percobaan seperti gambar – 4.6 di atas.
2. buat hubungan tahanan luar dalam hubungan Y.
3. hubungkan tahanan luar ke terminal rotor.
4. tutup S1 yang menghubungkan PTAC1 dengan terminal stator.
5. tutup switch S
2dan S
3.
6. tahanan luar buat pada harga 0 Ohm.
7. PTDC1 dan PTDC2 dinaikkan tegangannya sampai pada nilai tertentu.
8. naikan tegangan PTAC1 sampai pada nilai 360 Volt.
9. catat kecepatan, torsi, arus, dan daya.
10. tambahkan beban yang dipikul motor, lalu catat kecepatan ,torsi, arus, dan daya. ulangi percobaan ini sampai 3 kali.
11. setelah menghasilkan 5 buah data, maka turunkan tegangan.
12. naikkan tahanan luar menjadi 1 Ohm. Dan ulangi prosedur 8 – 11.
13. lakukan posedur 8 s/d 11 untuk tahanan luar sebesar 2,3,4,5, dan 6 Ohm.
14. percobaan selesai.
3. Data percobaan
1.R
Luar= 0 Ohm, V
1= 370 Volt
rotor
n (rpm)
slip P (KWatt)
inTorsi (Nm)
I
stator(Ampere)
I
Rotor(Ampere)
1445 0,0378 1,52 3,42 3,6 2,35
1440 0,0402 1,57 4.05 3,7 2,69
1435 0,0441 1,59 5.21 3,73 3,98
1430 0,0480 1,63 7,63 3,92 4,70
1425 0,0514 1,69 8,90 4,21 5.07
2. R
Luar= 1 Ohm, V
1= 370 Volt
rotor
n (rpm)
slip P (KWatt)
inTorsi (Nm)
I
stator(Ampere)
I
Rotor(Ampere)
1345 0,1038 1,43 3,33 3,42 2,74
1320 0,1213 1,44 4,12 3,61 3,43
1310 0,1268 1,52 5,34 3,69 4,17
1295 0,1367 1,58 6,81 3,84 4,53
1285 0,1421 1,63 8.32 4,06 6,72
3. R
Luar= 2 Ohm, V
1= 370 Volt
rotor
n (rpm)
slip P (KWatt)
inTorsi (Nm)
I
stator(Ampere)
I
Rotor(Ampere)
1300 0,1339 1,42 3,24 3,46 3,04
1265 0,1567 1,41 3,97 3,71 3,36
1240 0,1745 1,47 4,54 3,42 3,62
1220 0,1872 1,51 5,52 3,58 4,23
1200 0,2004 1,59 6,67 3,47 5,34
4. R
Luar= 3 Ohm, V
1= 370 Volt
rotor
n (rpm) slip P (KWatt)
inTorsi (Nm) I
stator(Ampere)
I
Rotor(Ampere)
1220 0,1878 1,44 3,09 3,25 2,81
1200 0,1990 1,47 4,23 3,56 3,15
1185 0,2087 1,51 4,96 3,74 3,67
1175 0,2170 1,59 5,59 4,15 4,12
1145 0,2352 1,67 6,31 4,21 5,09
5. R
Luar= 4 Ohm, V
1= 370 Volt
rotor
n (rpm) slip P (KWatt)
inTorsi (Nm) I
stator(Ampere)
I
Rotor(Ampere)
1130 0,2452 1,43 2,94 3,57 2,72
1110 0,2589 1,46 3,24 3,69 3,01
1085 0,2761 1,52 4,11 3,95 3,46
1030 0,3141 1,61 4,92 4,18 4,1
1020 0,3209 1,69 6,42 4,57 5,3
6. R
Luar= 5 Ohm, V
1= 370 Volt
rotor
n (rpm)
slip P (KWatt)
inTorsi (Nm)
I
stator(Ampere)
I
Rotor(Ampere)
1100 0,2649 1,43 2,76 3,7 2,6
1080 0,2809 1,47 3,01 3,8 2,8
1025 0,3152 1,51 3,92 4,0 3,2
990 0,3412 1,62 4,34 4,1 3,7
825 0,4509 1,68 6,01 4,2 4,3
7. R
Luar= 6 Ohm, V
1= 370 Volt
rotor
n (rpm)
slip P (KWatt)
inTorsi (Nm)
I
stator(Ampere)
I
Rotor(Ampere)
1075 0,2821 1,44 2,65 3,9 2,5
1030 0,3143 1,49 2,97 4,1 2,7
980 0,3419 1,53 4,01 4,2 3,0
880 0,4134 1,56 4,26 4,4 3,4
765 0,4890 1,61 5,92 4,5 4,0
4.6 Analisa Data
Dalam penganalisaan ini akan membandingkan pengaruh tahanahan luar terhadap torsi awal yang didapat dari hasil percobaan dengan hasil perhitungan.
4.6.1 Perhitungan Parameter Motor Induksi
Perhitungan Parameter Motor Induksi Tiga Fasa Rotor Belitan A.Percobaan Tahanan DC pada Stator
= 1,5814 Ω
= 1.1× 1.581 = 1,7395 Ω
• Tahanan Stator
Maka tahanan statornya adalah :
R
1= R
1ac= 1,7395 Ω
B.Percobaan Tahanan DC pada Rotor
= 0,3703 Ω R
2ac= 1,1 × 0,3703
= 0,4073 Ω
• Tahanan Rotor
Maka tahanan rotornya adalah :
R
2= R
2ac= 0,4073 Ω
C.Percobaan Rotor Tertahan (Block Rotor)
= arc cos 0,5537 = 56,3787
0* Xbr
1= Zbr sin (θbr)
= 8,8968× 0,8327 = 7,4085 Ω
Maka dari hasil diatas didapat :
• Reaktansi stator
X
1= 0.5× Xbr = 3,7042 Ω
• Reaktansi rotor
X
2= 0.5× Xbr = 3,7042 Ω
D.Percobaan Beban Nol
• Reaktansi Magnetik Xm =Znl- X
1
= 61,9155 – 3,7042 = 58,2133 Ω 4.6.2 Perhitungan Torsi Maksimum
• Vin = Tegangan Sumber
• p = Jumlah Pole
A. Tegangan Thevenin
= 200,7606 Volt B. Tahanan Ekivalen
=
Zth = 1,5363+j3,5257 Ω Maka tahanan kivalennya adalah:
• Tahanan Ekivalen (Re) Re=1,5363 Ω
C. Reaktansi Ekivalen Zth=1,5363+ j3,5257
• Reaktansi Ekivalen(Xe) Xe=3,5257 Ω
D. Kecepatan Sinkron dalam rpm
• Kecepatan Sinkron
E. Kecepatan Sinkron dalam
• Kecepatan Sinkron
F. Torsi Maksimum
• Torsi Maksimum(Nm)
= 43,1114 Nm
4.6.3 Perhitungan Nilai Torsi Awal Terhadap Penambahan Tahanan Luar Perhitungan pengaruh tahanan luar (R
luar) dari (0–6 )ohm,terhadap torsi awal yang dihasilkan
Maka untuk R
luar(0–8) ohm adalah : a.R
luar= 0 Ω
= 5,5941 Nm
Maka dengan cara yang sama didapat:
b.R
luar= 1 Ω e`R
luar= 4 Ω
T
start= 17,7787 Nm T
start= 38,7320 Nm c.R
luar= 2 Ω f. R
luar= 5 Ω
T
start= 27,3238 Nm T
start= 41,4257 Nm d.R
luar= 3 Ω g. R
luar= 6 Ω
T
start= 34,1936 Nm T
start= 42,7528 Nm
Dari perhitungan maka didapat kurva torsi awal yang dihasilkan terhadap tahanan luar, seperti berikut ini.
0 5 10 15 20 25 30 35 40 45
0 1 2 3 4 5 6 7
Torsi Awal (Nm)
Tahanan Luar (Ohm)
Kurva Torsi Vs Tahanan Luar
Sedangkan kurva torsi awal terhadap penambahan tahanan luar yang dilakukan di laboratorium didapat sebagai berikut.
4.6.4 Perhitungan Arus Start dengan Adanya Penambahan Tahanan Luar (R
luar)
Dengan penambahan tahanan luar dari (0–6) ohm,maka arus startya adalah sebagai berikut yaitu:
0 2 4 6 8 10 12 14 16
0 2 4 6 8
Torsi Awal (Nm)
Tahanan Luar (Ohm)
Kurva Torsi Vs Tahanan Luar
Maka untuk R
luar(0–6) ohm adalah:
a. R
luar= 0 Ω
= 26,8163 A Maka dengan cara yang sama didapat:
b. R
luar= 1 Ω e.R
luar= 4 Ω
I
start= 25,7184 A I
start= 21,4503 A c. R
luar= 2 Ω f. R
luar= 5 Ω I
start= 24,3777 A I
start= 20,0275 A
d. R
luar= 3 Ω g. R
luar= 6 Ω
I
start= 22,9220 A I
start= 18,6908 A
Dari nilai perhitungan di atas didapat grafik antara arus start dengan penambahan tahanan luar, sebagai berikut
0 5 10 15 20 25 30
0 2 4 6 8
Arus Start ( Ampere)
Tahanan Luar(Ohm)
Kurva Arus Start Vs Tahanan Luar
4.6.5 Perhitungan Slip Maksimum pada Saat Terjadi Torsi Maksimum Akibat Penambahan Tahanan Luar
Akibat adanya penambahan tahanan luar, maka torsi maksimum terjadi pada slip yang berbeda-beda .
Maka untuk R
luar(0–6) ohm adalah:
a. R
luar= 0 Ω
S = 0.0551
Maka dengan cara yang sama didapat:
b. R
luar= 1 Ω S = 0,1903
c. R
luar= 2 Ω
S = 0,3256
d. R
luar= 3 Ω
S = 0,4609
e. R
luar= 4 Ω
S = 0,5962
f. R
luar= 5 Ω
S = 0,7315
g. R
luar= 6 Ω
S = 0,8668
Dari perhitungan dapat dihasilkan grafik torsi-kecepatan terhadap penambahan tahanan luar.
... R
Luar= 0 ohm ... R
Luar= 4 ohm ... R
Luar= 1 ohm ... R
Luar= 5 ohm
... R
Luar= 2 ohm ... R
Luar= 6 ohm
... R
Luar= 3 ohm
0 5 10 15 20 25 30 35 40 45 50
0 500 1000 1500 2000
Torsi (Nm)
nrot(rpm)
Kurva Kecepatan Vs Torsi Motor Induksi
Dari nilai slip maksimum, data percobaan torsi awal terhadap penambahan tahanan luar dan data percobaan pengaruh tahanan luar terhadap torsi - kecepatan, maka dapat digambarkan kurva torsi – kecepatan terhadap penambahan tahanan luar seperti berikut ini.
... R
Luar= 0 ohm ... R
Luar= 4 ohm
... R
Luar= 1 ohm ... R
Luar= 5 ohm
... R
Luar= 2 ohm ... R
Luar= 6 ohm ... R
Luar= 3 ohm
-5 0 5 10 15 20 25 30 35 40 45 50
0 500 1000 1500 2000
Torsi(rpm)
nrot (rpm) Kurva Kecepatan Vs Torsi