42
BAB IV
ANALISA DAN PENGUJIAN ALAT
Pada BAB ini, akan dibahas tentang hasil pengujian alat yang telah dirancang, dari sisi hardware dan software-nya. Pengujian hardware dan software tersebut meliputi :
1. Pengujian sensor arus CR 9580-10 dan sensor tegangan, pengujian ini dimaksudkan untuk mengetahui bahwa sensor dapat berfungsi dengan baik dengan perubahan output sensor yang mengikuti perubahan inputannya.
2. Pengujian ADC mikrokontroler ATmega8535, pengujian ini dimaksudkan untuk mengetahui respon ADC mikrokontroler ATmega8535 terhadap tegangan input ADC serta resolusi ADC-nya.
3. Pengujian sensor arus CR 9580-10 dan sensor tegangan pada komputer, dilakukan untuk menguji komunikasi serial antara sensor arus dan tegangan dengan komputer.
4. Pengujian sistem keseluruhan, dilakukan untuk mastikan program aplikasi yang telah dibuat menggunakan Borland Delphi 7 dapat berkomunikasi dengan mikrokontroler ATmega8535, menampilkan data, dan mengolah data yang dikirim mikrokontroler ATmega8535 serta menyimpannya di database Microsoftt Access.
4.1. Pengujian Sensor Arus CR 9580-10
Pengujian sensor arus CR 9580-10, dilakukan untuk mengetahui respon tegangan keluaran sensor terhadap perubahan arus di sisi primer yang di-injeksikan. Pengujian dilakukan dengan cara menghubungkan kaki output positif sensor ke kabel positif multimeter digital dan kaki output negatif sensor ke kabel negatif multimeter
43
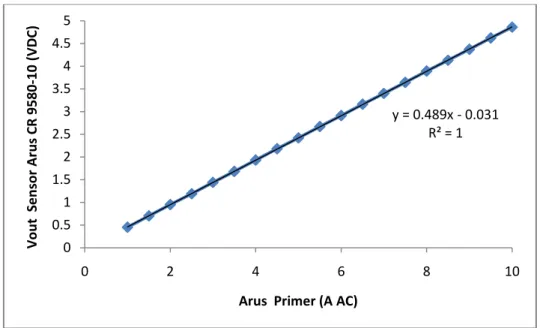
digital. Arus AC yang di-injeksikan ke sisi primer sensor arus sebesar 1 - 10 amper dengan kenaikan 0.5 amper. Kemudian, tegangan output sensor arus dicatat setiap kenaikan 0.5 amper. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara arus (A AC) dengan tegangan output sensor arus CR 9580-10 (VDC) yang ditunjukkan pada grafik 4.1.
Grafik 4.1 Output sensor arus CR 9580-10
Berdasarkan grafik 4.1, diperoleh persamaan garis y = 0.489x – 0.031, dimana x adalah nilai arus yang di-injeksikan di sisi primer sensor arus dan y adalah tegangan
output sensor arus CR 9580-10. Dari grafik tersebut juga dapat diketahui bahwa
kenaikan tegangan output sensor arus CR 9580-10 mengikuti kenaikan arus yang di-injeksikan di sisi primer sensor arus.
y = 0.489x - 0.031 R² = 1 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 2 4 6 8 10 Vo u t Sen sor Ar u s CR 9580 -10 (VDC)
44
4.2. Pengujian Sensor Tegangan
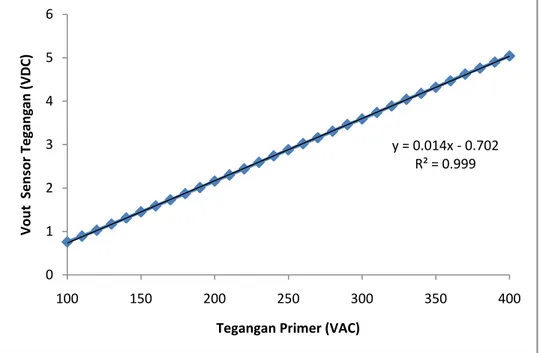
Pengujian sensor tegangan, dilakukan untuk mengetahui respon tegangan keluaran sensor terhadap perubahan tegangan di sisi primer yang di-injeksikan. Pengujian dilakukan dengan cara menghubungkan kaki output positif sensor ke kabel positif multimeter digital dan kaki output negatif sensor ke kabel negatif multimeter digital. Tegangan AC yang di-injeksikan ke sisi primer sensor tegangan sebesar 100 - 400 VAC dengan kenaikan 10 VAC. Kemudian, tegangan output sensor tegangan dicatat setiap kenaikan 10 VAC. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan (VAC) dengan tegangan output sensor tegangan (VDC) yang ditunjukkan pada grafik 4.2.
Grafik 4.2 Output sensor tegangan
Berdasarkan grafik 4.2, diperoleh persamaan garis y = 0.014x – 0.702, dimana x adalah nilai tegangan AC yang di-injeksikan di sisi primer sensor tegangan dan y
y = 0.014x - 0.702 R² = 0.999 0 1 2 3 4 5 6 100 150 200 250 300 350 400 Vo u t Sen sor Te gan gan (VDC)
45
adalah tegangan output sensor tegangan. Dari grafik tersebut juga dapat diketahui bahwa kenaikan tegangan output sensor tegangan mengikuti kenaikan tegangan AC yang di-injeksikan di sisi primer sensor tegangan.
4.3. Pengujian ADC Mikrokontroler ATmega8535
Pengujian ADC mikrokontroler ATmega8535, dilakukan untuk mengetahui respon ADC internal mikrokontroler terhadap tegangan input tyang diberikan, resolusi ADC dan komunikasi serial dengan komputer dapat berjalan dengan baik. Pengujian ini dilakukan dengan menggunakan rangkaian komunikasi serial mikrokontroler ATmega8535, dengan ditambahkan resistor variable yang dirangkai sebagai pembagi tegangan dan dihubungkan ke PA.0 serta VCC. Selain itu, tegangan referensi ADC yang digunakan adalah sebesar 5 VDC dan dihubungkan ke pin AVCC. Tegangan input ADC diatur oleh resistor variable dengan range 0-5000 mVDC dan bobot biner yang tampil di komputer dicatat sebagai bukti pengujian. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan input ADC (mVDC) dengan bobot biner yang ditunjukkan pada grafik 4.3.
46
Grafik 4.3 Pengujian ADC mikrokontroler ATmega8535
Berdasarkan grafik 4.3, diperoleh persamaan garis y = 4.962x – 5.481, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah tegangan input ADC. Dari grafik tersebut juga dapat diketahui bahwa resolusi ADC yang diperoleh adalah 4.962 mV/bit, hasil yang diperoleh ini mendekati hitungan secara teoritis sebesar 4.88 mV/bit.
4.4. Pengujian Sensor Arus CR 9580-10 pada Komputer
Pengujian ini dilakukan untuk mengetahui respon perubahan bobot biner yang ditampilkan di komputer terhadap perubahan tegangan output sensor arus CR 9580-10. Pengujian dilakukan dengan menggunakan rangkaian pengujian ADC mikrokontroler ATmega8535 dengan input ADC pada PA.0 diganti dengan dihubungkan pada kaki output positif sensor arus dan kaki ground sensor arus dihubungkan ke kaki ground mikrokontroler ATmega8535. Kemudian, arus AC
di-y = 4.962x - 5.481 R² = 1 0 1000 2000 3000 4000 5000 6000 0 200 400 600 800 1000 1200 Vi n A D C (m VD C) Bobot Biner
47
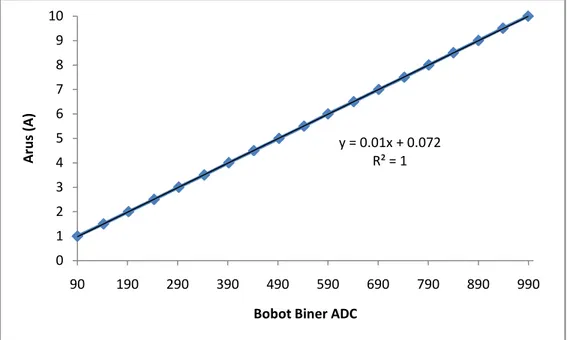
injeksikan ke sisi primer sensor arus dengan range 1 - 10 amper dan kenaikan 0.5 amper. Bobot biner yang tampil di komputer dicatat setiap kenaikan 0.5 amper. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara arus AC yang di-injeksikan di sisi primer sensor arus dengan bobot biner yang tampil di komputer dan ditunjukkan pada grafik 4.4.
Grafik 4.4 Pengujian sensor arus CR 9580-10 pada komputer
Berdasarkan grafik 4.4, diperoleh persamaan garis y = 0.01x + 0.072, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah arus AC yang di-injeksikan di sisi primer sensor arus. Persamaan garis yang diperoleh pada pengujian ini adalah persamaan yang juga akan digunakan di Borland Delphi 7 untuk mengkonversi perubahan nilai bobot biner menjadi arus AC yang terukur sensor arus.
y = 0.01x + 0.072 R² = 1 0 1 2 3 4 5 6 7 8 9 10 90 190 290 390 490 590 690 790 890 990 Ar u s (A)
48
4.5. Pengujian Sensor Tegangan pada Komputer
Pengujian ini dilakukan untuk mengetahui respon perubahan bobot biner yang ditampilkan di komputer terhadap perubahan tegangan output sensor tegangan. Pengujian dilakukan dengan menggunakan rangkaian pengujian ADC mikrokontroler ATmega8535 dengan input ADC pada PA.0 diganti dengan dihubungkan pada kaki
output positif sensor tegangan dan kaki ground sensor tegangan dihubungkan ke kaki ground mikrokontroler ATmega8535. Kemudian, tegangan AC di-injeksikan ke sisi
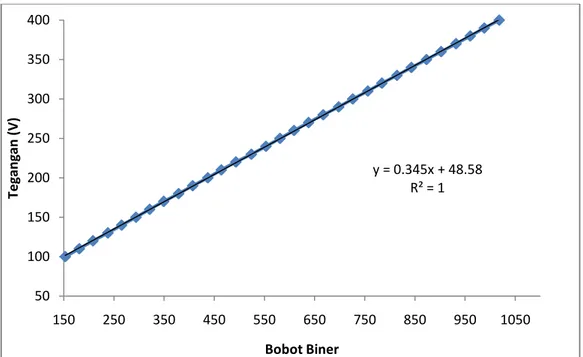
primer sensor tegangan dengan range 100 - 400 VAC dan kenaikan 10 VAC. Bobot biner yang tampil di komputer dicatat setiap kenaikan 10 VAC. Data hasil pengujian tersebut dapat dibuat grafik hubungan antara tegangan AC yang di-injeksikan di sisi primer sensor tegangan dengan bobot biner yang tampil di komputer dan ditunjukkan pada grafik 4.5.
Grafik 4.5 Pengujian sensor tegangan pada komputer y = 0.345x + 48.58 R² = 1 50 100 150 200 250 300 350 400 150 250 350 450 550 650 750 850 950 1050 Tegan gan ( V) Bobot Biner
49
Berdasarkan grafik 4.5, diperoleh persamaan garis y = 0.345x + 48.58, dimana x adalah nilai bobot biner yang tampil di komputer dan y adalah tegangan AC yang di-injeksikan di sisi primer sensor tegangan. Persamaan garis yang diperoleh pada pengujian ini adalah persamaan yang juga akan digunakan di Borland Delphi 7 untuk mengkonversi perubahan nilai bobot biner menjadi tegangan AC yang terukur sensor tegangan.
4.6. Pengujian Sistem Keseluruhan
Pengujian sistem keseluruhan dilakukan untuk mengetahui bahwa alat yang dibuat dari sisi hardware dan software dapat berfungsi dengan baik. Keberhasilan alat diukur dengan cara mikrokontroler ATmega8535 dapat mengkonversi perubahan tegangan output sensor menjadi data ADC kemudian mengirimkannya ke komputer dengan komunikasi serial untuk ditampikan di program Borland Delphi 7. Di Borland Delphi 7 data ADC di kalkulasi dengan menggunakan rumus yang diperoleh dari hasil uji sensor arus atau tegangan pada komputer. Kemudian hasil kalkulasi tersebut di tampilkan pada kolom edit dan dalam bentuk grafik di form monitoring. Pada form
database data yang ditampilkan akan di-auto saving dengan interval 5 detik ke database Microsoftt Access dan dapat diolah ulang kembali dengan meng-eksport ke
Microsoftt Excel. Jika dibutuhkan data berupa hardcopy, maka data yang ditampilkan di form database dapat diprint menggunakan printer.
Pengujian sistem keseluruhan juga telah dilakukan dengan membandingkan pembacaan arus dan tegangan dari alat yang telah dibuat dengan pembacaan alat ukur standar. Untuk pembacaan nilai arus dari sensor CR 9580-10 dibandingkan dengan pembacaan dari digital power meter WT 130. Sedangkan, untuk pembacaan tegangan oleh sensor tegangan dibandingkan dengan pembacaan multimeter digital fluke 289. Grafik yang menunjukkan data perbandingan pembacaan arus dan tegangan dari alat yang dibuat dengan alat ukur standar ditunjukkan pada grafik 4.6 dan grafik 4.7.
50
Grafik 4.6 Grafik perbandingan pembacaan arus dari sensor CR 9580-10 dengan
digital power meter WT 130
Berdasarkan grafik 4.6, diperoleh koefisien korelasi linear r = 100%. Hal ini menunjukkan pembacaan arus oleh sensor CR 9580-10 dengan digital power meter WT 130 adalah sama. y = x R² = 1 0 2 4 6 8 10 12 0 2 4 6 8 10 12 A ru s Se n sor CR 9580 -10 (A A C)
51
Grafik 4.7 Grafik perbandingan pembacaan tegangan dari sensor tegangan dengan multimeter digital fluke 289
Berdasarkan grafik 4.7, diperoleh koefisien korelasi linear r = 100%. Hal ini menunjukkan pembacaan arus oleh sensor tegangan dengan multimeter digital fluke 289 adalah sama.
Pengambilan data telah dilakukan pada tanggal 31 maret 2015, yang bertempat di ruang MCC Boiler unit 5 PLTU Suralaya. Object motor induksi tiga fasa yang diukur arus dan tegangannya adalah motor mill lube oil C1 dan mill lube oil D2. Pengambilan data dimulai pukul 14:04 PM sampai pukul 14:29 PM dan diperoleh data arus dan tegangan sebanyak 260 data. Berikut ini adalah tampilan dari program aplikasi yang telah dibuat saat pengambilan data.
y = 1.000x + 0.272 R² = 1 0 50 100 150 200 250 300 350 400 0 50 100 150 200 250 300 350 400 Tegan gan Sen sor Tegan gan (VAC)
52
Gambar 4.1 Tampilan form monitoring saat pengambilan data
Pada gambar 4.1 merupakan tampilan dari form monitoring sebelum pengambilan data dimulai. Tampilan grafik dan kolom edit belum menunjukkan data arus dan tegangan motor induksi tiga fasa yang dimonitor. Sebelum pengambilan data dimulai perlu dilakukan penentuan port komunikasi serial yang akan digunakan. Penentuan port serial tersebut dapat dilakukan dengan memilih button setting.
53
Gambar 4.2 Tampilan form database saat pengambilan data
Pada gambar 4.2, terlihat data ter-record terdiri dari Tanggal, Waktu, Amp1_R, Amp1_S, Amp1_T, Volt1, Amp2_R, Amp2_S, Amp2_T dan Volt2. Pada
form database dilengkapi fasilitas data kontrol yang memudahkan dalam melakukan
navigasi pada database dan mengontrol jumlah data yang ter-record. Fasilitas data
searching juga disediakan pada form ini yang memudahkan dalam melakukan
pencarian data yang diinginkan berdasarkan Tanggal, Waktu, Amp1_R, Amp1_S, Amp1_T, Volt1, Amp2_R, Amp2_S, Amp2_T dan Volt2.
54
Gambar 4.3 Tampilan database Microsoftt Access dengan data ter-record
Pada database Microsoft Access data arus dan tegangan motor induksi tiga fasa yang dimonitor di simpan di tabel motor. Interval penyimpanan data pada database ini adalah setiap 5 detik dan dapat diubah sesuai kebutuhan di form database.
55
Gambar 4.4 Tampilan Microsoft Excel dengan data ter-record
Data yang ditampilan pada Microsoft Excel merupakan data yang ter-record di form
database. Di Microsoft Excel data dapat diolah kembali dengan menggunakan
56
Gambar 4.5 Tampilan print preview data yang ter-record
Dengan disediakannya fasilitas cetak pada form database, maka data yang ter-record dapat dicetak menggunakan printer. Pada gambar 4.5 menunjukkan preview laporan
database dari arus dan tegangan motor induksi tiga fasa yang dimonitor dan siap