Penggunaan & Pengaturan
Motor Listrik
PENDAHULUAN
PENDAHULUAN
Ada 3 jenis pengereman yang dapat diterapkan pada hampir semua jenis motor listrik, yaitu:
(a) Pengereman regeneratif;
Terjadi bila motor beroperasi sebagai generator pada saat masih terhubung ke power supply sehingga energi mekanik diubah menjadi energi listrik dan dikembalikan ke supply. Kebanyakan mesin listrik dapat melalui perubahan mode dari aksi motor menjadi generator secara lancar jika mengalami overdrive oleh beban.
(b) Pengereman rheostatik atau dinamik;
PENDAHULUAN
(c) Pengereman plugging atau arus balik;
Pengereman ini melibatkan koneksi ulang power supply ke motor sehingga motor cenderung berputar dalam arah yang berlawanan. Jika diinginkan motor untuk berhenti dan tidak terus berputar dalam arah yang berlawanan, maka diperlukan relay untuk memutus supply pada saat ketika motor berhenti. Plugging
DIAGRAM EMPAT KUADRAN
Hubungan kelajuan–torsi yang menyatakan aksi dari suatu mesin listrik dapat direpresentasikan dalam diagram empat kuadran sebagai berikut:
(i) Pada saat torsi positif dan kelajuan positif, mesin berada pada mode motor / drive;
(ii) Pada saat torsi negatif dan kelajuan positif, mesin berada pada mode pengereman;
(iii) Pada saat torsi negatif dan kelajuan negatif, mesin berada pada mode motor / drive dalam arah putar yang berlawanan;
PENGEREMAN LISTRIK MOTOR DC
1. Pengereman Motor DC Shunt
(a) Pengereman Rheostatik atau Dinamik
Koneksi motor shunt untuk operasi pengereman dinamik ditunjukkan pada Gambar 3.5. Jangkar diputuskan dari supply
dan kemudian dihubungkan melalui resistanse Re. Mesin bekerja sebagai generator yang digerakkan oleh energi kinetik yang tersimpan dan mendisipasikan daya dalam rangkaian jangkar.
PENGEREMAN LISTRIK MOTOR DC
Misalkan arus medan adalah If, ggl rotasional Er pada kelajuan r = Kf , dimana Kf adalah tetapan. ra = resistansi jangkar; Re = resis-tansi eksternal dalam rangkaian jangkar untuk pengereman. Total resistansi rangkaian jangkar R = ra + Re.
Arus pengereman dalam jangkar = ��
� = ���
dan daya pengereman Pb = ��2
� =
���� 2
�
Waktu untuk mengurangi kelajuan dari 1 menjadi 2:
PENGEREMAN LISTRIK MOTOR DC
Jika waktu pengereman tb diberikan dan 1 diketahui, laju motor
2 dapat ditentukan dari
���� = � � �
Rugi inti, rugi mekanik dan torsi beban direpresentasikan (pendekatan) oleh rugi-rugi dalam resistansi semu Rm yang paralel dengan Re.
(b) Pengereman Plugging atau Arus Balik
PENGEREMAN LISTRIK MOTOR DC
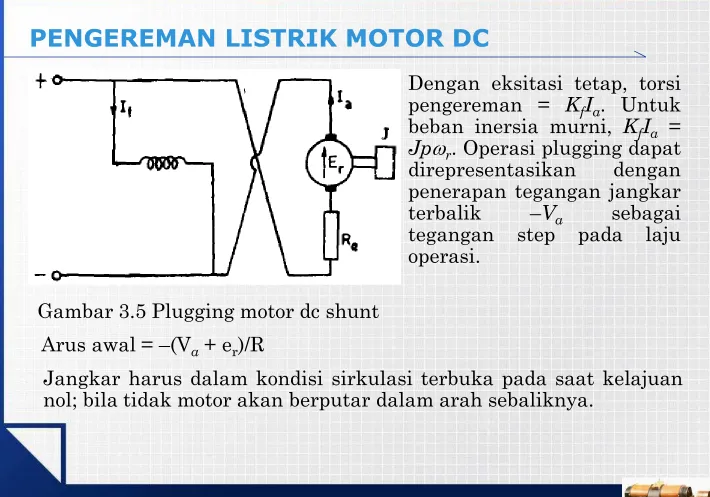
Gambar 3.5 Plugging motor dc shunt
Dengan eksitasi tetap, torsi pengereman = KfIa. Untuk beban inersia murni, KfIa =
Jpr. Operasi plugging dapat direpresentasikan dengan penerapan tegangan jangkar terbalik –Va sebagai tegangan step pada laju operasi.
Arus awal = –(Va + er)/R
PENGEREMAN LISTRIK MOTOR DC
(c) Pengereman Regeneratif
Pengereman regeneratif memungkinkan untuk motor dengan penguatan shunt dan penguatan terpisah. Metode ini hanya mungkin dilakukan bila ggl rotasional melebihi tegangan yang diterapkan ke jangkar. Hal ini bisa terjadi dengan memperkuat medan atau dengan mengubah tegangan jangkar. Regeneratif tidak memerlukan modifikasi atau pun tambahan terhadap peralatan yang ada. Akan tetapi, kelajuannya dibatasi sampai nilai kelajuan saat motor berputar pada kondisi medan penuh.
Perbandingan dengan Metode Pengereman yang Lain
PENGEREMAN LISTRIK MOTOR DC
Torsi pada semua kasus dibatasi sampai nilai yang berhubungan dengan arus maksimum yang diperbolehkan dan eksitasi penuh. Dalam sistem Ward Leonard, pengereman regeneratif pada torsi di atas kondisi maksimum seperti di atas dapat dilakukan pada seluruh kelajuan dalam kedua arah putaran.
PENGEREMAN LISTRIK MOTOR DC
2. Pengereman Motor DC Seri
(a) Pengereman Rheostatik atau Dinamik
Merupakan hal yang jarang untuk mengeksitasi belitan medan seri oleh sumber supply yang terpisah. Balik koneksi jangkar atau medan untuk memastikan bahwa jangkar akan membentuk ggl. Resistansi pengereman harus dibuat sedemikan hingga (Re + ra + rse) lebih kecil dari resistansi kritis untuk kelajuan saat pengereman dilakukan. Torsi pengereman akan hilang setelah kelajuan kritis dicapai.
(b) Pengereman Regeneratif
PENGEREMAN LISTRIK MOTOR INDUKSI
(a) Pengereman Dinamik
Dalam operasi normal, motor induksi dieksitasi dari sistem supply. Dalam pengereman dinamik motor induksi, belitan stator motor tiba-tiba dicatu dengan supply dc. Jadi dalam pengereman dinamik, belitan stator digunakan sebagai belitan medan dc dan belitan rotor sebagai belitan jangkar. Dalam kasus motor squirrel cage, belitan rotor itu sendiri membentuk beban pada motor selama pengereman. Dalam kasus motor induksi slip ring atau rotor belitan, resistansi eksternal dapat ditambahkan ke rangkaian rotor untuk membentuk beban. Eksitasi dc dapat diberikan ke stator melalui rectifier atau supply dc.
Dengan koneksi ini, arus ac ekivalen pada stator sehubungan dengan eksitasi dc untuk menghasilkan fluks yang sama adalah
=
PENGEREMAN LISTRIK MOTOR INDUKSI
PENGEREMAN LISTRIK MOTOR INDUKSI
(b) Pengereman Plugging atau Arus Balik
PENGEREMAN LISTRIK MOTOR INDUKSI
PENGEREMAN LISTRIK MOTOR INDUKSI
(b) Pengereman Regeneratif