Informasi Dokumen
- Penulis:
- Sri Windari
- Muhammad Ulil Azmi R
- Pengajar:
- Abdul Basith, ST, M.Si, Ph.D
- Sekolah: Universitas Gadjah Mada
- Mata Pelajaran: Teknik Geodesi
- Topik: Pengolahan Data Singlebeam Echosounder, Multibeam Echosounder dan Side Scan Sonar untuk Pemetaan Dasar Laut
- Tipe: laporan kerja praktek
- Tahun: 2014
- Kota: Yogyakarta
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini memberikan latar belakang mengenai pentingnya pengolahan data dalam survei hidrografi, khususnya menggunakan alat seperti Singlebeam Echosounder, Multibeam Echosounder, dan Side Scan Sonar. Penjelasan mengenai tujuan kerja praktek dan pentingnya pengalaman lapangan bagi mahasiswa juga disampaikan.
1.1 Latar Belakang
Latar belakang menjelaskan perkembangan teknologi dalam survei dan pemetaan, beralih dari metode konvensional ke teknologi modern. Penekanan pada eksplorasi sumber daya laut dan pentingnya survei hidrografi di era modern diuraikan untuk memberikan konteks terhadap proyek yang dilakukan di PT. PAGEO UTAMA.
1.2 Tujuan
Tujuan kerja praktek dibagi menjadi tujuan umum dan khusus. Tujuan umum mencakup pengenalan proyek di lapangan, sedangkan tujuan khusus berfokus pada pemahaman tahapan pengolahan data echosounder untuk pembuatan peta dasar laut. Hal ini penting untuk mempersiapkan mahasiswa menghadapi dunia kerja.
1.3 Waktu Pelaksanaan Kerja Praktek
Waktu pelaksanaan kerja praktek berlangsung selama satu bulan, dari 22 Januari 2014 hingga 22 Februari 2014, di PT. PAGEO UTAMA. Penjelasan mengenai waktu yang dihabiskan untuk berbagai kegiatan juga disampaikan.
1.4 Tempat Pelaksanaan Kerja Praktek
Kerja praktek dilaksanakan di PT. PAGEO UTAMA yang berlokasi di Jakarta. Penjelasan mengenai fasilitas dan dukungan yang diberikan oleh perusahaan selama pelaksanaan kerja praktek juga diuraikan.
1.5 Jadwal Kegiatan Kerja Praktek
Jadwal kegiatan kerja praktek dirinci, termasuk pengenalan alat, mobilisasi survei, dan pengolahan data echosounder. Ini memberikan gambaran jelas tentang aktivitas yang dilakukan selama periode kerja praktek.
1.6 Landasan Teori
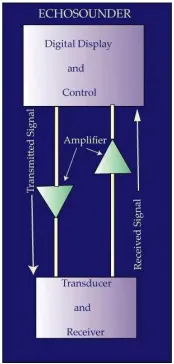
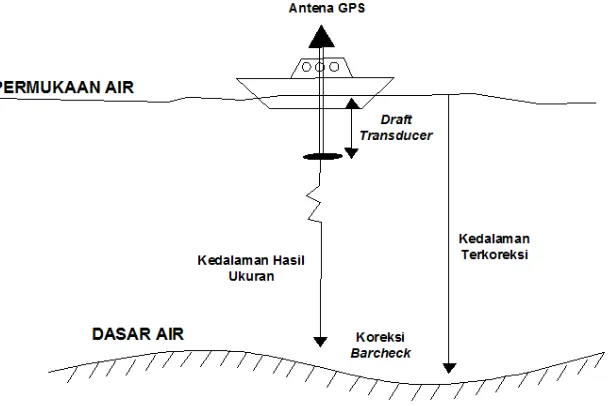
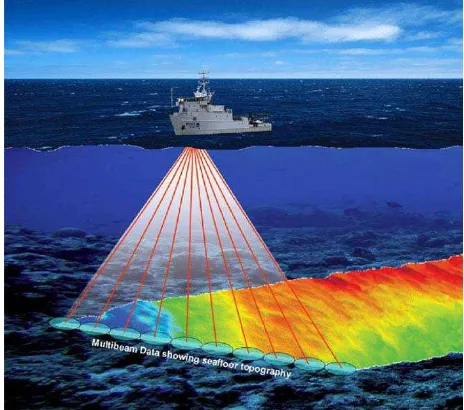
Bagian ini menjelaskan teori dasar yang mendasari survei batimetri dan penggunaan alat echosounder. Penjelasan tentang prinsip kerja dan komponen dari Singlebeam Echosounder, Multibeam Echosounder, dan Side Scan Sonar disertakan untuk memberikan pemahaman yang lebih dalam.
II. PELAKSANAAN
Bagian ini merinci proses pelaksanaan akuisisi data lapangan dan pengolahan data, termasuk langkah-langkah yang diambil untuk memastikan data yang akurat dan berkualitas.
2.1 Pelaksanaan Akuisisi Data Lapangan
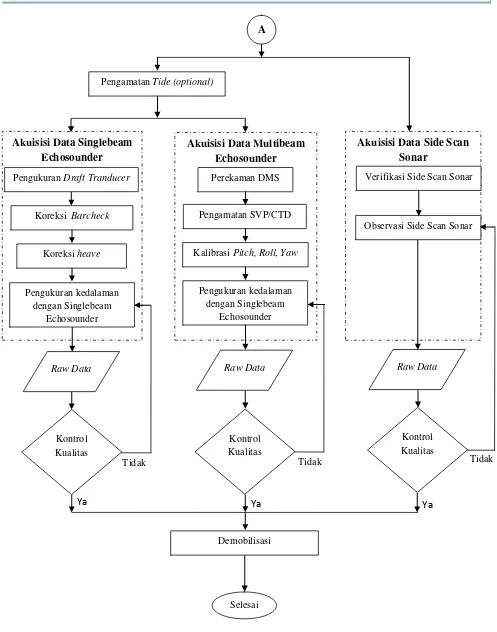
Pelaksanaan akuisisi data lapangan mencakup diagram alir yang menunjukkan langkah-langkah yang diambil untuk mengumpulkan data menggunakan berbagai alat survei. Proses ini penting untuk memastikan data yang diperoleh berkualitas dan akurat.
2.1.1 Diagram Alir Akuisisi Data Lapangan
Diagram alir menggambarkan alur proses pengukuran offset, verifikasi DGPS, kalibrasi heading, dan akuisisi data dari berbagai alat. Ini memberikan gambaran sistematis tentang bagaimana data dikumpulkan di lapangan.
2.1.2 Persiapan dan Mobilisasi
Tahap persiapan dan mobilisasi mencakup pengaturan alat dan personil yang terlibat dalam survei. Penjelasan mengenai pentingnya persiapan sebelum pengukuran untuk menghindari kesalahan di lapangan juga disampaikan.
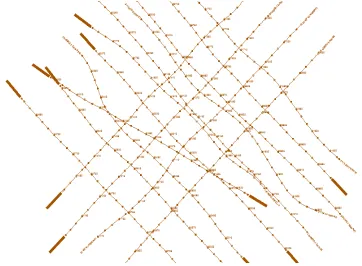
2.1.3 Perencanaan Survey Lines
Perencanaan lajur survei sangat penting untuk mendapatkan cakupan yang optimal saat melakukan pengukuran. Jarak antar lajur dan pengaturan garis survei dijelaskan untuk memastikan efisiensi dalam pengumpulan data.
2.1.4 Pengukuran Offset Alat Survei
Pengukuran offset adalah proses penting untuk menentukan posisi alat survei dibandingkan dengan titik acuan. Proses ini memastikan bahwa data yang dikumpulkan akurat dan dapat diandalkan.
2.1.5 Verifikasi DGPS
Verifikasi DGPS dilakukan untuk memastikan akurasi posisi yang dihasilkan. Proses ini melibatkan perbandingan antara hasil pengukuran DGPS dan Total Station untuk memastikan kesesuaian data.
2.1.6 Kalibrasi Heading
Kalibrasi heading dilakukan untuk mengoreksi arah kapal saat survei. Proses ini penting untuk memastikan bahwa data yang dikumpulkan mencerminkan posisi yang sebenarnya.
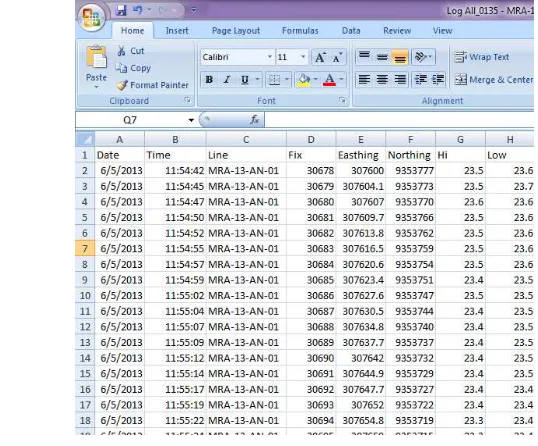
2.1.7 Hasil Akuisisi Data
Setelah akuisisi data, hasil yang diperoleh dari alat seperti singlebeam echosounder, multibeam echosounder, dan side scan sonar dijelaskan. Data ini merupakan dasar untuk pengolahan lebih lanjut.
2.1.8 Kontrol Kualitas
Kontrol kualitas dilakukan untuk memastikan bahwa data yang dikumpulkan memenuhi standar yang ditetapkan. Proses ini penting untuk menjamin keakuratan dan konsistensi data.
2.1.9 Demobilisasi
Demobilisasi adalah tahap akhir dari proses akuisisi data, yang mencakup pelepasan alat dan personil dari lokasi survei. Proses ini memastikan bahwa semua peralatan telah dikeluarkan dan pekerjaan selesai sesuai kontrak.
2.2 Pelaksanaan Pengolahan Data
Pengolahan data dilakukan untuk mengubah raw data menjadi informasi yang berguna. Proses ini mencakup berbagai langkah yang diperlukan untuk memastikan data siap untuk analisis lebih lanjut.
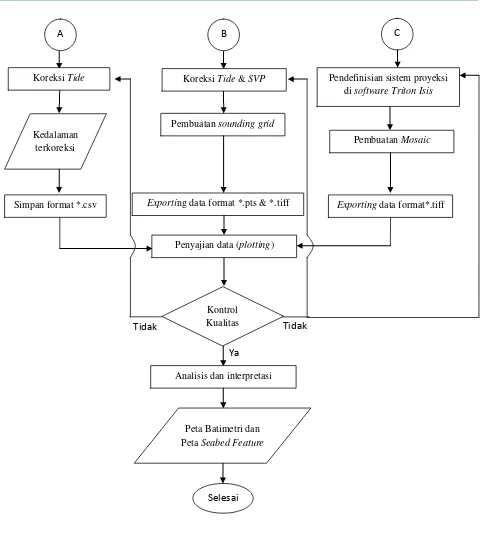
2.2.1 Diagram Alir Pelaksanaan Pengolahan Data
Diagram alir menunjukkan langkah-langkah yang diambil dalam pengolahan data, mulai dari input data hingga pembuatan peta. Ini memberikan gambaran jelas tentang alur kerja dalam pengolahan data.
2.2.2 Persiapan
Tahap persiapan melibatkan pengumpulan semua data dan peralatan yang diperlukan untuk pengolahan. Ini adalah langkah penting untuk memastikan bahwa semua sumber daya tersedia sebelum memulai pengolahan data.
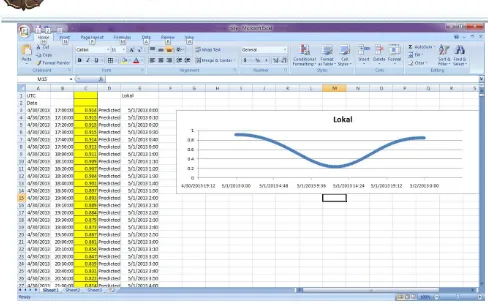
2.2.3 Pengolahan Data Singlebeam Echosounder
Tahapan pengolahan data singlebeam echosounder mencakup pemilihan data, koreksi tide, dan plotting hasil. Proses ini penting untuk menghasilkan peta yang akurat dari data yang dikumpulkan.
2.2.4 Pengolahan Data Multibeam Echosounder
Pengolahan data multibeam echosounder melibatkan kalibrasi dan pengolahan untuk menghasilkan data batimetri yang berkualitas tinggi. Proses ini menjelaskan langkah-langkah yang diambil untuk memastikan data yang dihasilkan akurat.
2.2.5 Pengolahan Data Side Scan Sonar
Pengolahan data side scan sonar mencakup konversi format dan interpretasi fitur dasar laut. Proses ini penting untuk menghasilkan informasi yang berguna dari data yang diperoleh.
III. ANALISIS DAN PEMBAHASAN
Bagian ini membahas karakteristik data yang diperoleh dari berbagai alat echosounder dan analisis pengolahan data yang dilakukan.
3.1 Karakteristik Data Singlebeam Echosounder, Multibeam Echosounder dan Side Scan Sonar
Karakteristik data dari masing-masing alat dijelaskan, termasuk kelebihan dan kekurangan masing-masing metode pengukuran. Hal ini penting untuk memahami konteks penggunaan alat dalam survei hidrografi.
3.2 Analisis Pengolahan Data Singlebeam Echosounder
Analisis pengolahan data singlebeam echosounder meliputi evaluasi hasil pengukuran dan perbandingan dengan data yang diharapkan. Proses ini penting untuk menilai keakuratan dan konsistensi data.
3.3 Analisis Pengolahan Data Multibeam Echosounder
Analisis data multibeam echosounder mencakup evaluasi resolusi dan cakupan data yang dihasilkan. Proses ini memberikan wawasan tentang efektivitas penggunaan multibeam dalam survei batimetri.
3.4 Analisis Pengolahan Data Side Scan Sonar
Analisis pengolahan data side scan sonar berfokus pada interpretasi fitur dasar laut yang terdeteksi. Ini penting untuk memahami kondisi dan karakteristik dasar laut yang dipetakan.
IV. KESIMPULAN DAN SARAN
Bagian ini menyimpulkan hasil kerja praktek dan memberikan saran untuk pengembangan lebih lanjut.
4.1 Kesimpulan
Kesimpulan merangkum hasil dari pengolahan data yang dilakukan dan efektivitas penggunaan alat-alat survei dalam menghasilkan data yang akurat untuk pemetaan dasar laut. Ini mencerminkan pencapaian tujuan kerja praktek.
4.2 Saran
Saran diberikan untuk peningkatan proses survei dan pengolahan data di masa depan. Ini mencakup rekomendasi untuk penggunaan teknologi terbaru dan pelatihan lebih lanjut bagi personil yang terlibat.