PERANCANGAN DAN IMPLEMENTASI HOVERCRAFT SEBAGAI PEMANTAU
cukup besar seperti rusaknya sarana prasarana umum dan juga menghambat sistem kerja, pendidikan, serta perekonomian didaerah ini. Dikarenakan seringnya terjadi banjir di kota ini, maka diperlukan suatu alat yang secara langsung memantau keadaan pada saat banjir.Namun untuk pemantauan yang maksimal, dibutuhkan alat yang dapat melintasi bebagai rintangan dan berbagai medium. Alat tersebut adalah Hovercraft, sebuah kendaraan amphibi mini yang dapat melintasi medan darat, air, lumpur maupun ladang bakau dan tahan dengan segala kondisi cuaca, digerakkan menggunakan tiga buah propeller untuk melayang dan bermanuver yang juga dilengkapi dengan kamera untuk memantau keadaan banjir di daerah Bandung Selatan. Hovercraft menggunakan arduflyer untuk kontrol sistem, serta unuk display dan sistem mekanik menggunakan motor servo untuk menggerakkan flaps. Hovercraft menggunakan 1 motor brushless sebagai pengangkat dan 2 motor brushless sebagai pendorong.
Kata kunci : Hovercraft, Pemantau Banjir, Arduflyer, Brushless. Abstract
Floods often occur in the city of Bandung has raised many substantial losses such as damage to public infrastructure and also hamper the work system, education and the economy of this area. Due to frequent flooding in this city, we need a tool that directly monitor the situation at the time of the flood.
But for maximum monitoring, we need a tool that can traverse the kinds of obstacles and a variety of mediums. The tool is Hovercraft, an amphibious mini vehicle that can traverse the terrain of land, water, mud and fields of mangroves and resistant to all weather conditions, driven using three propeller for hovering and maneuvering that is also equipped with a camera to monitor the flood situation in the South Bandung. Hovercraft use arduflyer for control systems, as well as transform, display and mechanical systems using servo motors to move the flaps. Hovercraft uses a brushless motor as a lifter and two brushless motors as driver.
Keyword: Hovercraft, Flood Observer, Arduflyer, Brushless
1. PENDAHULUAN
Dataran tinggi Bandung terletak pada satu daerah yang rata-rata 600-700 meter di atas permukaan laut. Tetapi, ketinggian satu wilayah bukanlah jaminan daerah tersebut akan terbebas dari banjir, terutama di daerah Bandung Selatan yang menjadi langganan luapan aliran sungai Citarum dan ketinggian banjir bisa mencapai 3 meter. Sehingga dibutuhkan alat pemantau untuk mencari korban banjir sekaligus memantau keadaan banjir secara langsung. yang mana derasnya arus dan banyaknya pemukiman membuat sulitnya melakukan pemantauan keseluruhan di area banjir tersebut.
Ghz
Hever
Gambar 2.5 Gaya Angkat Pada Hover [I] 2. Sistem Dorong dan Gaya Dorong
Untuk menggerakkan kendaraan hover digunakan gaya dorong yang diperoleh dari propeller
seperti pada pesawat udara, dikarenakan hover membutuhkan tenaga dorong yang lebih besar dari kendraan lainnya. Sistem dorong biasanya menggunakan tenaga gerakan kipas. Untuk
menggerakkan hover maju, mundur maupun berbelok, merupakan fungsi utama dari sistem dorong
...::,,.,---_.L----+
---s-1uak- I
cktik•akonm•nc•p•iJank
Gambar 2.6 Gaya Dorong Pada Hover [I]
3. PERANCANGAN SISTEM
3.1 Perancangan Secara Umum
Setelah melakukan studi literature dari hovercraft, selanjutnya adalah membuat rancangan sistem secara
umum seperti gambar dibawah ini.
Recer.or58Ghz
•
>))
{(<
•
TransmtterS.8Penggerat
Remote Control
Gambar 3.1 Perancangan Sistem Secara Umum
Hovercraft menggunakan mikrokontroller untuk kontrol sistem yang mendapatkan daya dari baterai melalui
power module serta unuk display dan sistem mekanik menggunakan motor servo untuk menggerakkanflaps.
Hovercraft menggunakan I brushless motor sebagai pengangkat dan 2 brushless motor sebagai pendorong yang mendapatkan daya dari baterai melalui ESC dan power module. Dan hovercraft menggunakan radio kontrol sebagai kontrol jarak jauhnya.
Dalam pergerakan hovercraft dari sitem mulai ON sampai OFF mengikuti logika seperti gambar
T;dak�T;dak Ya
Ya Ya
Maju kc Kiri
Power Off Hovercrett Turuo
Finish
Gambar 3.2 Flowchart Pergerakan Hovercraft
3.2 Perancangan Perangkat Keras (Hardware)
Perancangan perangkat keras terdiri atas dua bagian yaitu rancang bangun mekanik hovercraft dan desain sistem elektronik.
3.2.1 Desain Mekanik Hovercraft
Sistem mekanik yang baik akan mendukung pergerakan hovercraft menjadi lebih baik, oleh karena itu perancangan mekanik haruslah proporsional dengan titik beban hovercraft. Pada bagian desain mekanik terdapat 3 komponen utama dari hovercraft, sebagai berikut :
1. Hull yakni badan hovercraft yang dapat dibuat dari marine alluminium, fiber glass, dan sebagainya. serta dibuat kedap air. Rongga di dalam hull diisi dengan polyurethane foam yang
membuat hovercraft tetap mengapungjika terjadi kebocoran pada hull.
2. Skirt yaitu bagian hovercraft yang berfungsi untuk menahan udara di bawah hovercraft agar
tidak mudah keluar. Skirt terbuat dari tekstil yang dilapisi karet untuk menjaga agar udara tetap berada di dalam ruang dibawah hull.
3. Sumber Tenaga Hovercraft, pada prototipe ini kami menggunakan 3 buah brushless motor
sebagai penggerak. Dan I brushless motor yang berfungsi untuk sistem angkat. Hovercraft memiliki kecepatan yang sangat tinggi dan mampu mengangkat beban sampai 2.5 Kg.
\ I
·
�
.
·
Gambar 3.4 Rekonstruksi hovercraft sebenarnya
3.2.2 Desain Sistem Elektronik
Sistem elektronika yang ada pada hovercraft terdiri atas beberapa sistem yaitu power supply
sebagai sumber untuk mengaktifkan semua sistem, sistem kontrol yang digunakan adalah radio controle
untuk mengirimkan sinyal yang akan di terima oleh Hovercraft melalui flight controller yaitu sebagai penerima sinyal dari radio control kemudian sinyal yang diterima akan mengontrol kornponen•
komponen yang terdapat pada hovercraft yaitu electronic speed controller, brushless motor, servo
motor.
3.3 Percobaan Lapangan Dan Analisa
Setelah proses pembuatan prototipe hovercraft, dilakukan percobaan lapangan yang melibatkan
operator sebagai pengontrol, sehingga prototipe ini dapat berjalan dan melakukan manuver dengan
semestinya dan juga dapat mengambil gambar sesuai dengan yang diinginkan.
4. IMPLEMENTASI DAN PENGUJIAN
4.1 Kalibrasi
4.1.l Kalibrasi APM
Pengkalibrasian APM dilakukan agar mendapatkan kesetabilan dari hovercraft. Kalibrasi pada tugas akhir
kali ini dilakukan menggunakan software APMPlanner. Berikut tahap kalibrasi pada tugas akhir ini :
I. Hubungkan konektor ke APM dan PC sehingga di APMPlanner terlihat terhubung.
2. Di menu lnstal Setup download Firm Ware yang diinginkan, dan pada tugas akhir kali ini digunakan
Firm Ware Fix Wing.
3. Setelah terinstal eek respon perubahan posisi, dengan cara merubah posisi sudut APM.
4. Jika APM sudah responsive maka APM siap digunakan.
4.1.2 Kalibrasi Remote
Pengkalibrasian remote dilakukan agar didapat kondisi yang sesuai dengan kebutuhan hovercraft. Kalibrasi
remote control dilakukan dengan cara melihat respon remote pada APM.
4.2 Pengujian Jangkauan
Ada 2 macam kondisi pengujian yaitu :
I. LOS (Line OfSight)
LOS atau tanpa halangan adalah suatu kondisi dimana pada saat melihat suatu benda tanpa ada
halangan atau terlindung oleh benda lain. Pada kasus ini pengujian dilakukan disebuah tanah lapang
yang luas. Jarak maksimal antara radio kontrol dan hovercraft pada pengujian LOS adalah I Km. jarak
ini didapat mulai berjalan hingga hovercraft benar-benar mati karena kehilangan sinyal. Pengujian
No
I
Jarak (m)
43
2 87
3 132
4 176
5 217
6 258
7 289
8 308
9 330
10 346
Gambar 4.1 Pengujian Jarak LOS 2. Nan-LOS
Non-LOS atau dengan halangan adalah suatu kondisi dimana pada saat melihat sesuatu pandangan kita
terhalang oleh benda lain. Pada kasus ini diuji coba pada gang disekitar jalan radio dengan interferensi
berupa rumah atau perkampungan warga. Berikut hasil pengujian nan-LOS hovercraft:
Gambar 4.2 Pengujian Jarak non-LOS Tabel 4. 1 Pengujian Jarak non-LOS
Sinyal (Ya/Tidak) YA
YA
YA YA
YA
YA
YA YA
YA
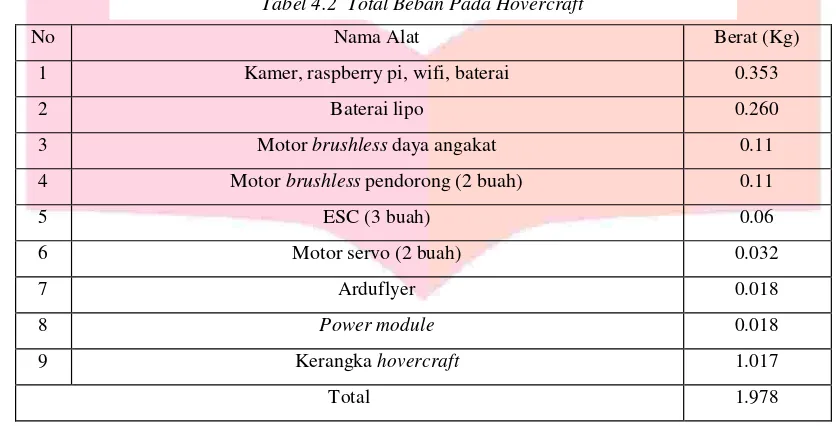
4.3 Pengujian Beban
Pengujian beban dilakukan bertujuan untuk mengatahui beban maksimal yang dapat diangkat oleh hovercraft. Jika beban melebihi kapasitas daya angkat hovercraft maka hovercraft tidak akan bekerja sebagaimana mestinya. Pada hovercraft digunakan satu buah brushless motor dengan kapasitas daya angkat sebesar 1.1 Kg. hovercraft memampatkan angin yang berasal dari motor brushless sehingga daya angkat bertambah menjadi 2.5 Kg
Pengujian arus dilakukan bertujuan untuk mengetahui debit air yang dapat dilalui oleh hovercraft. Pengujian pertama dilakukan pada saat air tenang. Hovercraft dapat bekerja secara maksimal panda kondisi air yang tenang, hal ini dikarenakan tidak ada gaya yang dilawan pada saat hovercraft bergerak maju. Pengujian kedua dilakukan pada air berarus berikut data pengujian percobaan hovercraft dengan air berarus:
5.1 Kesimpulan
Berdasarkan hasil pengujian dan analisis yang telah dilakukan didapatkan hasil penelitian sebagai berikut : 1. Sebelum menggunakan APM dan remote control terlebih dahulu dilakukan proses kalibrasi agar
dapat digunakan sesuai dengan kebutuhan dan juga bisa berfungsi sebagaimana mestinya.
2. Jangkauan antara remote dengan hovercraft ketika dalam kondisi LOS bisa mencapai 1 Km, tetapi ketika dalam kondisi non LOS jangkauan remote hanya bisa mencapai 330 m.
3. Udara yang dimampatkan dapat menambah daya angkat hovercraft sebesar 1.4 Kg, hal ini dikarenakan tekanan udara yang dikeluarkan pada bagian bawah hovercraft dengan tekanan tinggi. 4. Hovercraft dapat berjalan secara normal pada saat air tenang, dan dapat berjalan di arus yang kuat
juga tetapi dengan tenaga ekstra untuk melaluinya. Dan ketika menghadapi arus sebesar 3.99 km/jam hovercraft tidak mampu melawan arus lagi.
5. Hovercraft mampu bertahan selama 1 jam 20 menit pada saat dinyalakan terus menerus.
5.2 Saran
Berdasarkan hasil penelitian dan kesimpulan yang telah dilakukan di dapatkan beberapa saran untuk pengembangan lebih lanjut dari tugas akhir ini:
1. Perbaiki control kesetabilan pada hovercraft.
2. Tambahkan modul GPS agar bisa tracking hovercraft.
3. Perkecil dimensi hovercraft agar bisa bergerak leluasa ditempat sempit. 4. Perbesar daya dorong pada hovercraft..
6. DAFTAR PUSTAKA
[1] Prihatama, Erlan Fajar, “Rancang Bangun Pengendali Jarak Jauh Arah Dan Laju Kendaraan Hover
Dengan 2 Tenaga Dorong”, ITS: Surabaya, 2011.
[2] Yuliawan, Hendra Dwi, “Perancangan Sistem Thruster Dan Lifter Tipe Terpisah Untuk Hovercraft
Militer Dengan Payload 15 Ton”, ITS: Surabaya, 2010.
[3] Kurniahadi, Adeck A, “Sistem Pengendali Kecepatan Motor Pendorong Robot Hovercraft Line
Follower Menggunakan ATmega 8535”.
[4] Okafor, “Development of a Hovercraft Prototype”, University of Technology: Owerri-Nigeria, 2013.
[5] Jin, Zhipu, “The Second Generation Caltech Multi-vedicle Wireless Testbed”, Amerika Serikat, 2002.
[6] M.Z.A, Rashid, “Dynamic Mathematical Modeling and Simulation Study of Small Scale Autonomous
Hovercraft”, Vol. 46, 2012
[7] Frederic, L. R, “wall Following and Speed Control in Straight and Tapered corridors”, Guangzhou:
Cina, 2012.
[8] Amaruddin, A.K, “Development of a Hovercraft Prototype With an Aluminium Hull Base”, Malaysia,
2011.
[9] Dave, Divyesh, “Working Model of Remote Controlled Hovercraft”, ISSN: 2249-8958, Vol. 3 Issue-6,
2014