BAB 2
LANDASAN TEORI
2.1 Telur Infertil
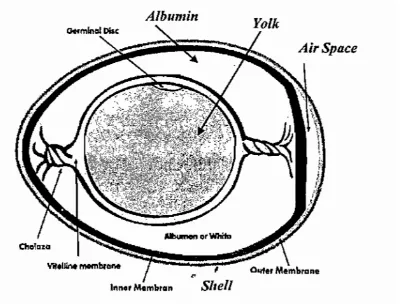
Gambar 2.1 Bagian bagian telur (Faridah, 2008)
Telur mempunyai bagian-bagian yang ditampilkan pada gambar 2.1. Ada 4 bagian utama telur yang akan mendukung proses penetasan, yaitu
1 Kuning telur (yolk) 2 Putih telur (Albumen) 3 Cangkang (shell) 4 Ruang udara (air space)
dan warna kuning telur
mempengaruhi penetasan
sebagainya, tapi 7.5 % dari
infertil (Lawrence, et al., 2008)
2.2 Machine Vision
Machine Vision adala memprosesnya, mesin ini
2.2, sebuah lampu m
mengumpulkan cahaya
pemrosesan citra yang diperole
2.3 Pengolahan Citra
Secara harafiah, citra (imag
lur lebih cerah saat dicandling. Banyak an telur diantaranya suhu inkubator, keb ari 100% penetasan gagal menetas dikarenakan ., 2008).
Gambar 2.2 Machine Vision
alah alat yang dirancang untuk memindai cit ni terdiri dari beberapa perangkat seperti terlihat menjadi sumber cahaya, telur, tabung berfun aya dari lampu, kamera digital dan komputer s
diperoleh dari kamera digital.
(image) adalah gambar pada bidang dwimatra (dua
anyak faktor yang
bersihan dan
n telur tersebut
citra telur dan
ihat di gambar
berfungsi untuk
sebagai pusat
dari intensitas cahaya pada bidang dwimatra (Munir, 2004). Sumber cahaya menerangi objek, objek memantulkan kembali sebagian dari berkas cahaya tersebut. Pantulan cahaya ini ditangkap oleh oleh alat-alat optik, misalnya mata pada manusia, kamera, pemindai (scanner), dan sebagainya, sehingga bayangan objek yang disebut citra tersebut terekam.
Pengolahan citra adalah pemrosesan suatu citra sehingga menghasilkan citra yang sesuai dengan keinginan kita atau kualitasnya menjadi lebih baik,dalam penilitian ini pengolahan citra akan digunakan untuk mengolah citra yang dihasilkan dari machine vision sehingga dapat dikalkulasi oleh aplikasi yang akan dibangun.
2.3.1 Citra Keabuan (Grayscale)
Citra keabuan adalah citra yang nilai pikselnya merepresentasikan derajat keabuan atau intensitas warna putih. Pada umumnya citra grayscale memiliki kedalaman pixel 8 bit (256 derajat keabuan),maka nilai intensitasnya berada pada interval 0(hitam) - 255(putih). Untuk mengkonversi citra warna ke citra grayscale digunakan rumus:
I(x, y) = ( R + G + B ) / 3 (1)
Konversi citra warna ke citra grayscale dapat juga dilakukan dengan cara memberi bobot pada setiap elemen warna , sehingga persamaan diatas dimodifikasi menjadi :
ܫሺݔ,ݕሻ=ߙ.ܴ+ߚ.ܩ+ߛ.ܤ (2)
2.3.2 Citra Biner
Citra biner disebut juga dengan bi-level adalah citra digital yang hanya mempunyai dua kemungkinan nilai derajat keabuan yakni hitam atau putih, untuk melakukan konversi citra grayscale menjadi citra biner dilakukan dengan membulatkan keatas atau ke bawah untuk setiap nilai keabuan dari piksel yang berada diatas atau bawah nilai ambang. Metode untuk menentukan besarnya nilai ambang disebut thresholding, dengan fungsi tresholding:
݂ሺ݅,݆ሻ=൜1, ݂(݅,݆) ≤ ܶ 0, ݈ܽ݅݊݊ݕܽ
2.4 Ekstraksi Fitur
Ekstraksi fitur merupakan suatu pengambilan ciri (fitur) dari suatu bentuk yang nantinya nilai yang didapatkan akan dianalisis untuk proses selanjutnya. Ektraksi fitur dilakukan dengan cara menghitung jumlah titik atau pixels yang ditemui dalam setiap pengecekan, dimana pengecekan dilakukan dalam berbagai arah tracing pengecekan pada koordinat kartesian dari citra digital yang dianalisis, yaitu vertical dan horizontal.
2.4.1 Ekstraksi fitur warna
a. Intensity
menyatakan banyaknya cahaya yang diterima oleh warna. Kisaran nilainya adalah antara gelap (hitam)
.3 memperlihatkan tingkatan nilai intensitas dari Hariyanto, 2009).
ambar 2.3 Representasi nilai Intensity
apat dihitung langsung dengan :
3
sebenarnya, seperti merah, violet, dan kuni membedakan warna-warna dan menentukan uan (greenness), dsb dari cahaya. Hue berasosias bang cahaya, dan bila menyebut warna merah, violet, menspesifikasikan nilai hue -nya. Seperti terlihat pada Gambar
hue merupakan sudut dari warna yang mempunyai menyatakan warna merah, lalu memutar nilai-ni kembali lagi ke 0° untuk menyatakan merah lagi
Gambar 2.4 Representasi nilai Hue
untuk menghitung nilai hue
c. Saturation
Saturation menyatakan seberapa banyak warna
terlihat pada Gambar
color), sedangkan warna sangat rendah (karena
garis dan kontur. Fitur bentuk
Kategori tersebut adalah be
(region-based). Teknik berda
daerah dengan mengguna
sepanjang batas objek. Bebe
berikut:
hue digunakan formula berikut:
atan2√3. G B, 2. R G B
akan tingkat kemurnian warna cahaya, yaitu mengindikasik arna putih diberikan pada warna. Sebagai contoh ar 2.5, warna merah adalah 100% warna jenuh warna pink adalah warna merah dengan tingka na ada warna putih di dalamnya). Jadi, jika hue maka saturation menyatakan seberapa dalam w
Gambar 2.3 Representasi nilai Saturation
lisan ini ditentukan dengan meggunakan persamaan: 1 3 min, ,
ntuk
adalah karakter konfigurasi permukaan yang diwaki bentuk dikategorikan bergantung pada teknik yang d
berdasarkan batas (boundary-based) dan berdas berdasarkan batas (boundary-based) menggamba akan karakteristik eksternal, contohnya adalah pik
eberapa contoh fitur ekstraksi bentuk disebutkan
a. Shape Index
ܵܫ=ܽ
ܾ ሺ6ሻ
dimana, ܽ adalah jumlah pixel garis mayor dan ܾ adalah jumlah pixel garis minor
b. Kebundaran (Roundness)
Roundness biasanya digunakan untuk menyatakan bundarnya garis luar suatu objek, semakin besar nilai roundnessnya semakin bundar telur tersebut dan semakin besar kemungkinan besar kemungkinan telur tersebut infertil. Didefinisikan sebagai berikut:
ܴ=4ߨܣ
ܲଶ ሺ7ሻ
dimana, A adalah jumlah luas atau jumlah pixel telur dan P adalah pixel perimeter atau keliling telur tersebut.
c. Kelonjongan (Elongation)
Elongation mendeskripsikan kerampingan sebuah telur, semakin besar nilai elongationnya semakin lonjong telur tersebut, dan semakin kecil kemungikinan telur tersebut infertil. Didefinisikan sebagai berikut:
ܧ=ܾ
ܣ ሺ8ሻ
dimana, ܾ adalah jumlah pixel garis minor dan A adalah jumlah luas atau jumlah pixel telur.
kemudian nilai dari dari masing-masing parameter tersebut dijadikan nilai neuron pada lapisan input jaringan multilayer perceptron.
2.5 Jaringan Saraf Tiruan
Jaringan saraf tiruan (artifical neural network) adalah sistem komputasi yang arsitektur dan operasinya diilhami dari pengetahuan tentang sel saraf biologis di dalam otak. Jaringan saraf tiruan merupakan salah satu representasi buatan dari otak manusia yang selalu mencoba menstimulasi proses pembelajaran pada otak manusia tersebut.
Jaringan saraf tiruan disusun dengan asumsi cara kerja yang sama seperti jaringan saraf manusia (Puspitaningrum, 2006):
1. Pengolahan informasi terjadi pada elemen-elemen pemrosesan (neuron). 2. Sinyal antara dua buah neuron diteruskan melalui link-link koneksi. 3. Setiap link koneksi memiliki bobot terasosiasi.
4. Setiap neuron menerapkan sebuah fungsi aktivasi terhadap input jaringan (jumlah sinyal input berbobot). Tujuannya adalah untuk menentukan sinyal output.
2.5.1 Komponen Jaringan Saraf Tiruan
Jaringan saraf tiruan terdiri dari banyak neuron yang menyusun jaringan tersebut. Neuron-neuron tersebut dikelompokkan ke dalam beberapa lapisan (layer) dan lapisan-lapisan tersebut memiliki hubungan satu sama lain.
Lapisan-lapisan penyusun jaringan saraf tiruan dapat dibagi menjadi 3, yaitu: 1. Lapisan input
Pada lapisan ini neuron-neuron akan menerima input yang selanjutnya diproses untuk dikirimkan ke lapisan selanjutnya.
Lapisan ini berada di antara lapisan input dan lapisan output. Pada lapisan ini bobot yang diterima dari lapisan input diproses untuk selanjutnya diproses untuk dikirimkan ke lapisan selanjutnya. Output dari lapisan ini tidak secara langsung dapat diamati.
3. Lapisan output
Lapisan ini merupakan lapisan akhir dimana nilai output dihasilkan. Pada lapisan ini ditetapkan nilai output aktual untuk dibandingkan dengan nilai output target untuk mengetahui apakah jaringan sudah sesuai dengan hasil yang diinginkan.
2.6 Algoritma Multilayer Perceptron
Multilayer perceptron adalah jaringan saraf tiruan umpan maju (feedforward neural networks) terdiri dari sejumlah neuron yang dihubungkan oleh bobot-bobot penghubung dan merupakan jaringan yang pembelajarannya terawasi sehingga perlu dimasukkan contoh-contoh respon ke dalam jaringannya untuk dikenali (Puspitaningrum, 2006).
Multilayer perceptron terdiri dari lapisan-lapisan yang disusun dalamnya neuron-neuron, lapisan tersebut terdiri dari satu lapisan input (input layer), satu atau lebih lapisan tersembunyi (hidden layer), dan satu lapisan output (output layer). Lapisan input menerima sinyal dari luar, kemudian melewatkannya ke lapisan tersembunyi pertama, yang akan diteruskan sehingga akhirnya mencapai lapisan output. Setiap neuron pada input layer terhubung dengan setiap neuron pada hidden layer. Demikian juga, setiap neuron pada hidden layer terhubung ke setiap neuron pada output layer. Setiap neuron, kecuali pada layer input, memiliki input tambahan yang disebut bias. Bilangan yang diperlihatkan pada gambar di atas digunakan untuk mengidentifikasi setiap node pada masing-masing layer.
Algoritma yang dijalankan oleh multilayer perceptron untuk mendapatkan bobot yang optimal (Muliantara, 2011)adalah sebagai berikut :
1. Inisialisasi bobot-bobot.
Tentukan laju pembelajaran (α).
Tentukan pula nilai toleransi error atau nilai ambang (bila menggunakan nilai ambang sebagai kondisi berhenti); atau set maksimal epoch (bila menggunakan banyaknya epoch sebagai kondisi berhenti).
2. Jika kondisi penghentian tidak terpenuhi lakukan langkah ke-2 sampai langkah ke-9.
3. Untuk setiap pasangan pola pelatihan, lakukan langkah ke-3 sampai langkah ke-8.
4. Setiap unit input xi (dari unit ke-1 sampai unit ke-n pada lapisan input) mengirimkan sinyal input ke semua unit yang ada di lapisan atasnya (ke lapisan tersembunyi)
5. Pada setiap unit di lapisan tersembunyi zj (dari unit ke-1 sampai unit ke-p; i=i,…,n; j=1,...,p) sinyal output lapisan tersembunyinya dihitung dengan menerapkan fungsi aktivasi terhadap penjumlahan sinyal-sinyal input berbobot xi:
ݖ = ݂ ൭ݒ+ ݔݒ
ୀଵ ൱
kemudian dikirim ke semua unit di lapisan atasnya.
6. Setiap unit di lapisan output yk (dari unit ke-1 sampai unit ke-m; i=1,...,n; k=1,…,m) dihitung sinyal outputnya dengan menerapkan fungsi aktivasi terhadap penjumlahan sinyal-sinyal input berbobot zj bagi lapisan ini:
ݕ =݂ ൭ݓ+ ݖݓ
ୀଵ
൱
7. Setiap unit output yk (dari unit ke-1 sampai unit ke-m; i=1,…,p; k=1,….,m) menerima pola target tk lalu informasi kesalahan lapisan output (δk) dihitung.
δ୩ =ሺt୩− y୩ሻ f′ቌw୩+z୨w୨୩ ୮
δk dikirim ke lapisan di bawahnya dan digunakan untuk mengitung besar koreksi bobot dan bias (∆wjk dan ∆w0k) antara lapisan tersembunyi dengan lapisan output:
∆wjk = α δk zj ∆w0k = α δk
8. Pada setiap unit di lapisan tersembunyi (dari unit ke-1 sampai unit ke-p; i=1,…,n; j=1,…,p; k=1,…,m) dilakukan perhitungan informasi kesalahan lapisan tersembunyi (δj).
δ୨=൭δ୩w୨୩) ୫
୩ୀଵ
൱f′൭v୨+x୧v୧୨ ୬
୧ୀଵ ൱
δj kemudian digunakan untuk menghitung besar koreksi bobot dan bias (∆wjk dan ∆w0k) antara lapisan input dan lapisan tersembunyi.
∆vij = α δj xi ∆v0j = α δj
9. Pada setiap unit output yk (dari unit ke-1 sampai unit ke-m) dilakukan peng-update-an bias dan bobot (j=0,…,p; k=1,…,m) sehingga bias dan bobot baru menjadi:
wjk (baru) = wjk (lama) + ∆ wjk
Dari unit ke-1 sampai unit ke-p di lapisan tersembunyi juga dilakukan peng-update-an pada bias dan bobotnya (i=0,…,n; j=1,…,p):
vij (baru) = vij (lama) + ∆ vij 10.Kondisi penghentian terpenuhi.
2.6.1 Fungsi Aktifasi
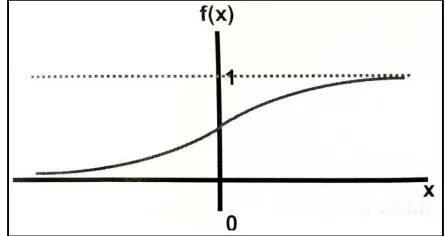
Pilihan fungsi aktivasi yang dapat digunakan pada metode propagasi balik yaitu fungsi sigmoid biner, sigmoid bipolar dan tangent hiperbolik. Karakteristiki yang harus imiliki fungsi aktivasi tersebut adalah kontinu, diferensiabel dan tidak menurun secara monoton. Fungsi aktivasi diharapkan jenuh (mendekati nilai-nilai maksimum dan minimum secara asimtot) (Puspitaningrum, 2006).
Fungsi ini merupakan fungsi yang umum digunakan. Rentang-nya adalah (0,1) dan didefenisikan sebagai :
݂ଵሺݔሻ = 1 1 +݁ି௫ dengan turunan :
݂ଵᇱሺݔሻ= ݂ଵሺݔሻ൫1 −݂ଵሺݔሻ൯
Fungsi sigmoid biner diilustrasikan pada gambar 2.6.
Gambar 2.6 Fungsi sigmoid biner dengan rentang (0,1)
2.6.2 Inilisialisasi Bobot dengan Acak
Prosedur yang umum dilakukan adalah menginisialisasi bias dan bobot, baik dari unit input ke unit tersembunyi maupun dari unit tersembunyi ke unit output secara acak dalam sebuah interval tertentu (-γ dan γ), misalnya antara -0.4 sampai 0.4, -0.5 sampai 0.5, dan -1 sampai 1 (Puspitaningrum, 2006).
2.6.3 Pengupdate Bobot dengan Momentum
∆wjk = α δk zj ∆vij = α δjxi
Jika error tidak terjadi (output actual telah sama dengan output target) maka δk menjadi nol dan hal ini akan menyebabkan koreksi bobot ∆wjk = 0, atau dengan kata lain pengupdatean bobot berlanjut dalam arah yang sama seperti sebelumnya.
Jika parameter momentum digunakan maka persamaan-persamaan pengupdatean bobot dengan langkah pelatihan t, dan t+1 untuk langkah pelatihan selajutnya, mengalami modifikasi sebagai berikut :
∆wjk(t + 1) = α δk zj + µ ∆wjk(t) ∆vij(t + 1) = α δj xi + µ ∆vij(t)
dengan µ adalah parameter momentum dalam range antara 0 sampai 1.
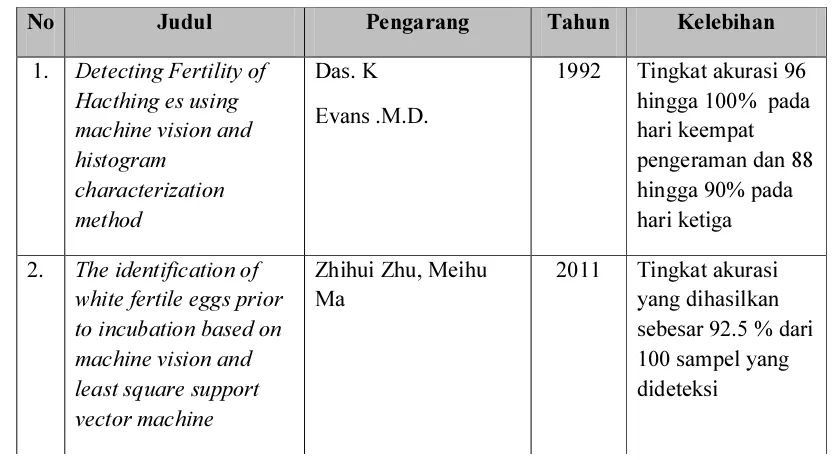
2.7 Penelitian terdahulu
Beberapa penelitian yang pernah dilakukan untuk mendeteksi telur infertil mengunakan teknik yang berbeda dijabarkan dalam tabel 2.1
Tabel 2.1 Penelitian terdahulu
No Judul Pengarang Tahun Kelebihan
1. Detecting Fertility of Hacthing es using
1992 Tingkat akurasi 96 hingga 100% pada hari keempat pengeraman dan 88 hingga 90% pada hari ketiga
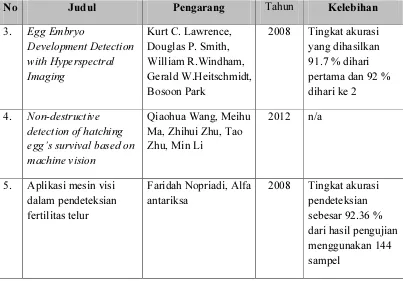
Tabel 2.1 Penelitian terdahulu (Lanjutan)
No Judul Pengarang Tahun Kelebihan
3. Egg Embryo
Development Detection with Hyperspectral Imaging
Kurt C. Lawrence, Douglas P. Smith, William R.Windham, Gerald W.Heitschmidt, Bosoon Park
2008 Tingkat akurasi yang dihasilkan 91.7 % dihari pertama dan 92 % dihari ke 2
4. Non-destructive detection of hatching egg’s survival based on machine vision
Qiaohua Wang, Meihu Ma, Zhihui Zhu, Tao Zhu, Min Li
2012 n/a
5. Aplikasi mesin visi dalam pendeteksian fertilitas telur
Faridah Nopriadi, Alfa antariksa