BAB 2
DASAR TEORI
2.1 UMUM
Dalam perencanaan struktur lepas pantai, terdapat beberapa tahapan utama yang harus dilakukan. Tahapan tersebut yaitu tahap persiapan, tahap desain, tahap penawaran, dan tahap konstruksi.
Perencanaan struktur anjungan lepas pantai pada umumnya mencakup bidang keilmuan yang disajikan pada Gambar 2.1.
Untuk perencanaan dan desain struktur anjungan lepas pantai, diperlukan standar spesifikasi yang sesuai. Peraturan perencanaan dan spesifikasi standar yang digunakan adalah:
1. API RP 2A-WSD, 21st Edition “Recommended Practice for Planning,
Designing, and Cosntruction Fixed Offshore Platform”. American
Petroleum Institute, Washington DC, July 1st, 2000.
2. AISC 9th Edition “Manual of Steel Construction, Allowable Stress
Design”. American Institute of Steel Construction, AISC, New York 1989.
2.2 PEMBEBANAN
Anjungan lepas pantai harus di disain berdasarkan beban-beban yang diklasifikasikan dalam beberapa kategori sebagai berikut:
1. Beban tetap (Beban Mati) 2. Beban saat kondisi operasi
3. Beban lingkungan termasuk beban gempa 4. Beban konstruksi-instalasi
5. Beban impak
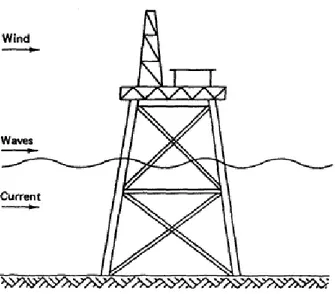
Beban lingkungan adalah beban yang bekerja pada struktur platform akibat dari fenomena alam, antara lain akibat angin, arus, dan gelombang. Beban lingkungan ini harus diperhitungkan dari segala arah kecuali jika kondisi tertentu, dapat dilakukan asumsi yang berbeda.
Gambar 2. 2 Beban lingkungan pada struktur offshore
Data yang tersedia untuk beban ini diolah untuk menggambarkan struktur platform dalam kondisi lingkungan operasional maupun ekstrim.
1. Kondisi lingkungan operasional
Kondisi normal diharapkan terjadi berulangkali selama struktur beroperasi. Kondisi ini penting dalam tahap konstruksi dan tahap masa
layan struktur platform. 2. Kondisi lingkungan ekstrim
Kondisi lingkungan ekstrim yang jarang terjadi selama struktur beroperasi. Kondisi ini penting untuk memformulasikan beban rencana platform.
2.2.1 Beban Mati
Beban mati pada struktur platform adalah berat dari struktur platform itu sendiri dan semua peralatan permanen serta perlengkapan struktur yang tidak berubah selama pengoperasian.Yang termasuk dalam beban mati struktur platform adalah: 1. Berat struktur platform di udara, termasuk berat dari pile, grout, dan
ballast jika ada.
2. Berat peralatan dan perlengkapan struktur yang sifatnya permanen pada platform.
3. Gaya hidrostatik yang bekerja pada struktur dibawah permukaan laut, termasuk tekanan dan gaya angkat.
2.2.2 Beban Hidup
Beban hidup pada struktur platform adalah beban-beban yang bekerja pada platform selama masa layannya dan mungkin dapat berubah saat pengoperasian.
Yang termasuk dalam beban hidup struktur platform adalah:
1. Beban perlengkapan pengeboran dan perlengkapan produksi yang bisa dipasang dan dipindahkan dari platform.
2. Berat dari ruang tempat tinggal (living quarters), heliport, dan perlengkapan penunjang lainnya yang bisa dipasang dan dipindahkan dari platform.
3. Berat dari suplai kebutuhan dan benda cair lainnya yang mengisi tangki penyimpanan.
4. Gaya yang bekerja pada struktur selama operasional seperti pengeboran, penambatan kapal, dan beban helikopter.
5. Gaya yang mengenai struktur dari penggunaan crane diatas deck.
2.2.3 Beban Konstruksi-Instalasi
Beban konstruksi-instalasi dihasilkan dari beban-beban pada saat fabrikasi, penambatan ke kapal pengangkut, transportasi, dan instalasi.
2.2.4 Angin
2.2.4.1 Gaya Angin
Gaya angin yang bekerja disebabkan oleh gesekan udara dengan permukaan dari struktur dan perbedaan tekanan antara bagian depan dan belakang dari struktur. Beban angin dikenakan pada bagian struktur yang berada diatas permukaan air.
F = 2 1 ρ C
s A V2 (2.1)
Keterangan:
ρ = massa jenis udara Cs = koefisien bentuk
A = luas objek (ft2)
V = kecepatan angin (mph)
ρ biasanya dianggap konstan terhadap perubahan tekanan dan suhu. Untuk suhu 60° F dan tekanan 14,7 lb/in persamaannya menjadi:
F = 0,00256 Cs A V2 (2.2)
Keterangan:
Cs = koefisien bentuk A = luas objek (ft2)
V = kecepatan angin (mph)
Harga koefisien bentuk yang biasa digunakan dalam perancangan dan analisis struktur lepas pantai diperlihatkan dalam dalam Tabel 2.1
Tabel 2. 1 Koefisien Bentuk
Kecepatan angin berubah sesuai ketinggian. Koreksi kecepatan angin apabila tidak sama dengan ketinggian referensi disajikan dengan persamaan:
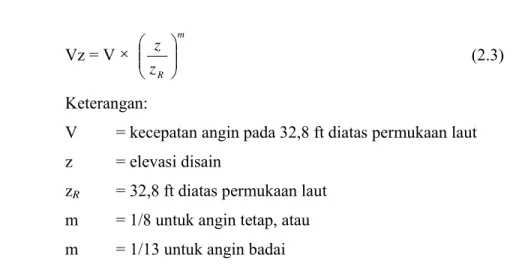
Vz = V × m R z z ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ (2.3) Keterangan:
V = kecepatan angin pada 32,8 ft diatas permukaan laut z = elevasi disain
zR = 32,8 ft diatas permukaan laut
m = 1/8 untuk angin tetap, atau m = 1/13 untuk angin badai
2.2.4.2 Gaya Angin Pada Bidang Miring
Untuk permukaan yang tidak tegak lurus terhadap arah angin, gaya angin harus diperhitungkan dengan menggunakan persamaan berikut ini.
F =
2
1 ρ C A V2 cos2 α (2.4)
Keterangan:
α = sudut arah angin dan arah normal dari permukaan elemen A = luas area pada arah normal elemen
Kecepatan angin pada arah normal elemen menjadi V cos α. Untuk silinder dengan panjang L dan diameter D atau untuk pelat datar dengan panjang L dan lebar D, maka A = L x D. Setelah F didapat, besar beban diproyeksikan kepada arah x dan y, sehingga Fx = F cos α dan Fy = F sin α
2.2.5 Gelombang
Gelombang laut terjadi karena adanya gaya-gaya yang bekerja pada fluida. Tiupan angin dan jatuhnya benda pada permukaan air dapat menimbulkan gelombang.
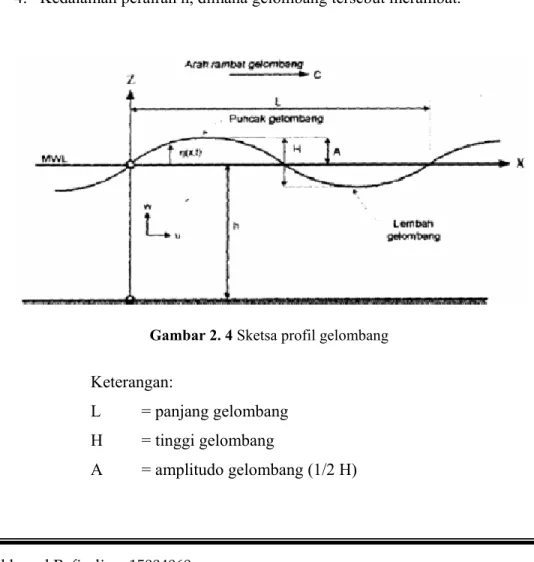
Parameter–parameter terpenting dalam menggambarkan gelombang (Gambar 2.4) adalah:
1. Panjang gelombang L (jarak horisontal antara dua puncak gelombang atau dua lembah gelombang yang saling berurutan).
2. Tinggi gelombang H (jarak vertikal antara puncak gelombang dan lembah gelombang).
3. Perida gelombang T (waktu yang ditempuh untuk mencapai satu lintasan gelombang).
4. Kedalaman perairan h, dimana gelombang tersebut merambat.
Gambar 2. 4 Sketsa profil gelombang Keterangan:
L = panjang gelombang H = tinggi gelombang
C = cepat rambat gelombang
u = kecepatan horisontal partikel air w = kecepatan vertikal partikel air MWL = Mean Water Level
η(x,t) = elevasi muka air di lokasi x pada saat t h = kedalaman perairan
2.2.5.1 Teori Gelombang Airy / Linier
Teori ini berdasarkan asumsi bahwa tinggi gelombang jauh lebih kecil jika dibandingkan dengan panjang gelombang L dan kedalaman h, jadi H<<L,h. Dengan asumsi bahwa H<<L,h tersebut, maka nilai suku-suku tak linier pada syarat batas kecil dan dapat diabaikan serta syarat batas di permukaan dapat diterapkan di z = 0, bukan di z = η lagi.
Dari syarat batas dinamis, dengan membuat rata-rata η = 0 maka C(t) = 0 sehingga η =
2
H cos (kx – ωt) (2.5)
Dari asumsi tersebut, maka menghasilkan persamaan berikut : Kecepatan partikel air pada arah horisontal u,
u =
(
) (
kx t)
kh z h k H x ω ω φ = + − ∂ ∂ − cos sinh cosh 2 (2.6) atau u =(
) (
kx t)
kh z h k gHk ω ω − + cos sinh cosh 2 (2.7)Percepatan partikel air arah horisontal adalah,
(
) (
)
t kx kh z h k H t u = ω + −ω ∂ ∂ sin sinh cosh 2 2 (2.8)w =
(
) (
kx t)
kh z h k H x ω ω φ = + − ∂ ∂ − sin sinh sinh 2 (2.9)Percepatan partikel air arah vertikal adalah,
(
) (
)
t kx kh z h k H t w = ω + −ω ∂ ∂ cos sinh sinh 2 2 (2.10)Kecepatan dan percepatan merupakan fungsi dari posisi, sehingga terdapat beda fase sebesar 90°, kecepatan horisontal akan mempunyai nilai yang ekstrim pada saat fase (kx – ωt) = 0, π,.... atau dibawah puncak dan lembah gelombang.
2.2.5.2 Teori Gelombang Stokes
Karena masalah konvergensi yang lebih sulit untuk kondisi laut dangkal, teori gelombang Stokes orde ke-5 dianggap valid untuk kondisi perairan dimana rasio kedalaman h/L lebih besar dari
10
1 . Kondisi ini umumnya sesuai dengan gelombang badai (storm wave) yang biasanya diperhitungkan dalam perancangan bangunan lepas pantai.
Untuk tinggi gelombang H, bilangan gelombang k, dan frekuensi ω, yang bergerak dalam arah sumbu x, permukaan gelombang Stokes dituliskan;
η =
∑
= 5 1 1 n n F k cos n (kx – ωt) (2.11) dimana F1 = a F2 = a2 F22 + a4 F24 F3 = a3 F33 + a5 F35 (2.12) F4 = a4 F44 F5 = a5 F55F22, F24, dan seterusnya, merupakan parameter profil (bentuk) gelombang yang
tergantung pada kh dan a merupakan parameter tinggi gelombang didalam persamaan berikut:
kH = 2
[
a+a3F33+a5(
F35 +F55)
]
(2.13) Kecepatan horisontal (u) dan kecepatan vertikal (w) partikel air gelombang Stokes (pada posisi x, waktu t, dan sejauh z dari dasar perairan) adalah:u = nkh nkz G k n n sinh cosh 5 1
∑
=ω
cos n (kx – ωt) (2.14) w = nkh nkz G k n n sinh sinh 5 1∑
=ω
sin n (kx – ωt) (2.15)dimana G1, G2, dst dituliskan sebagai berikut; G1 = a G11 + a3 G13 + a5 G15 G2 = 2
(
24)
4 22 2 G a G a + G3 = 3(
35)
5 33 3 G a G a + (2.16) G4 = 4 a4 G44 G5 = 5 a5 G55G11, G13, dst adalah parameter kecepatan gelombang yang bergantung pada kh.
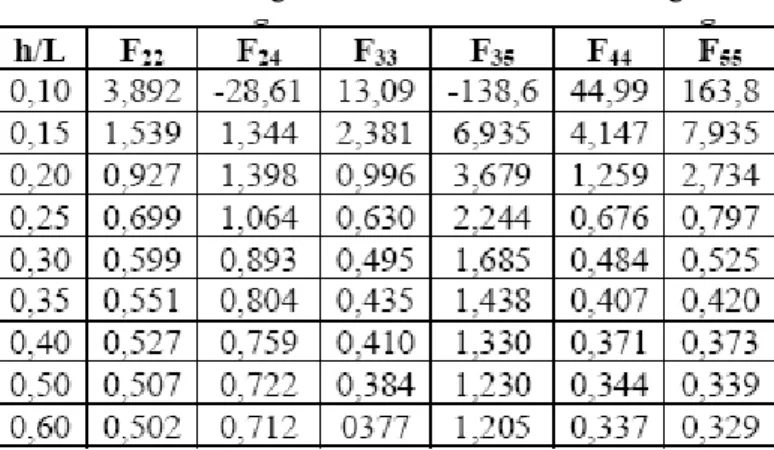
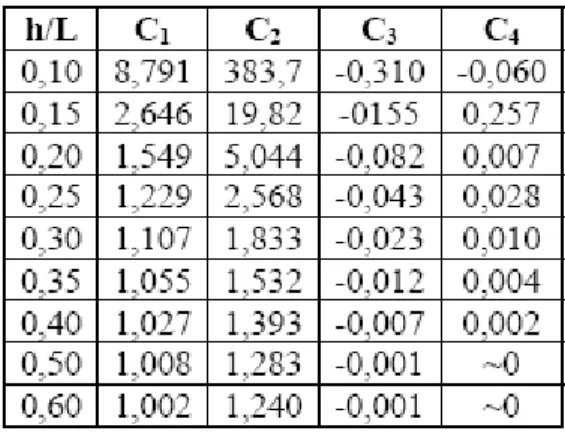
Persamaan parameter F22, F24, G11, dst diberikan oleh Skjelbreia dan Hendrickson
(F22 = B22, F24 = B24,dst dan G11 = A11 sinh kh, G24 = A24 sinh 2kh, dst). Tabel 2.2
dan tabel 2.3 memberikan pendekatan parameter-parameter tersebut untuk berbagai harga π 2 kh L h = .
Tabel 2. 2 Harga Parameter Bentuk Gelombang
Hubungan antara frekuensi gelombang dengan bilangan gelombang dalam teori Stokes; ω2 = gk
(
2)
4 1 2 1+a C +a C tanh kh (2.17)dimana C1 dan C2 adalah parameter frekuensi gelombang, tabel 2.3 memberikan
ilustrasi harga parameter frekuensi gelombang untuk berbagai harga h/L.
Kecepatan gelombang c ditentukan seperti pada teori gelombang Airy, c = σ k, dimana kecepatan gelombang Stokes orde ke-5 dituliskan sebagai berikut;
c =
(
)
2 1 2 4 1 2 tanh 1 ⎥⎦ ⎤ ⎢⎣ ⎡ + + kh C a C a k g (2.18)Tabel 2. 4 Parameter Frekuensi dan Tekanan Gelombang
Setelah semua koefisien dalam persamaan untuk kecepatan partikel akibat gelombang Stokes ditentukan, percepatan horisontal ax dan percepatan vertikal az dapat ditentukan dengan persamaan;
ax = z u w x u u t u ∂ ∂ + ∂ ∂ + ∂ ∂ (2.19) az = z w w x w u w w ∂ ∂ + ∂ ∂ + ∂ ∂ (2.20)
dengan menuliskan koefisien kecepatan sebagai:
Un = Gn nkh nkz sinh cosh (2.21) Wn = Gn nkh nkz sinh sinh (2.22)
dengan operasi trigonometri, persamaan percepatan partikel air dapat dituliskan dalam bentuk eksplisit berikut;
ax = kc R n
(
kx t)
n n −ω
∑
= sin 2 5 1 2 (2.23) az = kc S n(
kx t)
n n −ω
−∑
= cos 2 5 1 2 (2.24)R1 = 2U1 – U1U2 – W1W2 – U2U3 – W2W3 R2 = 4U2 – U12 + W12 – 2U1U3 – 2W1W3 R3 = 6U3 – 3U1U2 + 3W1W2 – 3U1U4 – 3W1W4 (2.25) R4= 8U4 – 2U22 + 2W22 – 4U1U3 + 4W1W3 R5= 10U5 – 5U1U4 – 5U2U3 + 5W1W4 + 5W2W3 dan S0 = -2U1W1 S1 = 2W1 – 3U1W2 – 3U2W1 – 5U2W3 – 5U3W2 S2 = 4W2 – 4U1W3 – 4U3W1 S3 = 6W3 – U1W2 + U2W1 – 5U1W4 – 5U4W1 (2.26) S4 = 8W4 – 2U1W3 + 2U3W1 + 4U2W2 S5 = 10W5 – 3U1W4 + 3U4W1 – U2W3 + U3W2
Tekanan akibat gelombang dan kontribusi hidrostatik dapat ditentukan dan komponen kecepatan dengan mensubstitusikan pada persamaan berikut,
p =
(
)
(
')
2 1 4 4 3 2 2 2 kz C a C a k g w u u k − + − + + ρ ρ ω ρ (2.27)dimana z’ = z – h, C3 dan C4 adalah parameter tekanan yang tergantung pada kh
atau h/L, harga C3 dan C4 dapat dilihat pada tabel 2.4
2.2.5.3 Analisis Statik Gelombang
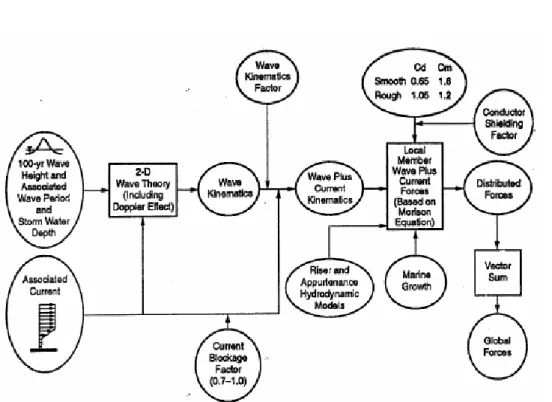
Beban gelombang memiliki sifat dinamis. Untuk sebagian besar kedalaman perairan rencana, beban ini dapat terwakili oleh beban statik yang ekuivalen. Urutan langkah perhitungan dari gaya gelombang statik deterministik pada anjungan lepas pantai tipe tetap, dimulai dengan penentuan tinggi gelombang desain dan perida gelombang yang berkaitan, kedalaman laut pada saat badai, dan profil arus. Prosedur perhitungan gaya gelombang menurut API RP2A-WSD, mengikuti langkah berikut ini:
1. Menentukan perida gelombang nyata (Apparent Wave Period), ditentukan dengan memperhitungkan efek Doppler akibat arus pada gelombang.
2. Kinematika gelombang dua dimensi ditentukan dari teori gelombang yang sesuai untuk suatu tinggi gelombang, kedalaman laut saat badai, dan apparent wave period.
3. Komponen mendatar dari kecepatan dan percepatan partikel yang diakibatkan oleh gelombang dikurangi oleh faktor kinematika gelombang, yang terutama mempertimbangkan arah penyebaran gelombang.
4. Arus efektif lokal ditentukan dengan mengalikan arus yang diketahui dengan faktor hambatan arus (current blockage factor).
5. Arus efektif lokal dikombinasikan searah dengan kinematika gelombang untuk menentukan kecepatan dan percepatan fluida lokal yang akan digunakan pada persamaan Morison.
6. Ukuran elemen diperbesar akibat marine growth.
7. Koefisien hidrodinamik (drag dan inertia) ditentukan sebagai fungsi dari parameter gelombang dan arus, bentuk elemen, kekasaran (akibat marine
growth), ukuran, dan arah.
8. Koefisien gaya gelombang untuk kumpulan konduktor berkurang karena adanya conductor shielding factor.
9. Pengembangan model hidrodinamik untuk riser dan struktur tambahan. 10. Gaya gelombang / arus lokal dihitung untuk seluruh elemen anjungan,
konduktor, riser, dan struktur tambahan, menggunakan persamaan Morison.
11. Gaya keseluruhan dihitung sebagai penjumlahan vektor dari seluruh gaya lokal.
Gambar 2. 5 Prosedur perhitungan gaya akibat gelombang dan arus untuk analisis statik
2.2.5.4 Apparent Wave Period
Arus yang searah dengan gelombang cenderung memperbesar panjang gelombang, sedangkan arus yang berlawanan memperkecil panjang gelombang.
Apparent wave period, Tapp, adalah perioda gelombang relatif terhadap arus
sejajar efektif. Untuk gelombang yang merambat pada suatu profil arus, penentuan apparent wave period dilakukan dengan menyelesaikan persamaan di bawah ini: 1 V T T app + =
λ
λ
Tapp2 =(
)
λ π πλ / 2 tanh 2 d g (2.28) V1 =(
)
U( )
z(
z d)
dz d d∫
c ⎥⎦ ⎤ ⎢⎣ ⎡ + 0 4 cosh / 4 sinh / 4 λ π λ π λ π (2.29) dimana: λ = panjang gelombangd = kedalaman laut saat badai
Uc(z) = komponen profil arus untuk kondisi tetap pada arah
gelombang z g = percepatan gravitasi
V1 = kecepatan arus sejajar efektif
T = perioda gelombang relatif terhadap objek tetap
2.2.5.5 Kinematika Gelombang Dua Dimensi
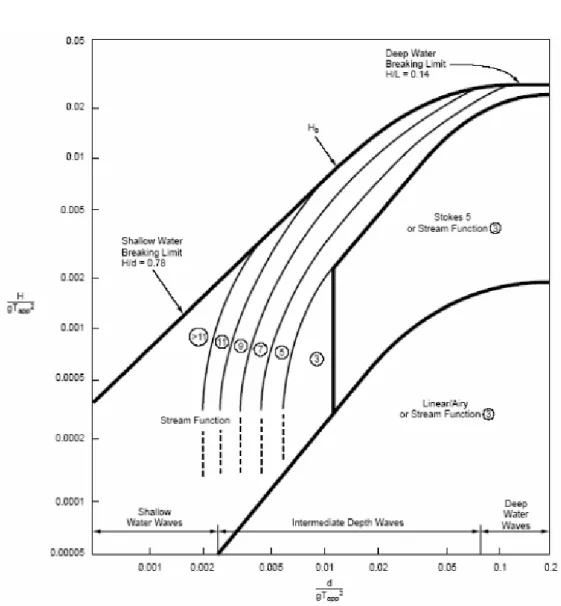
Kinematika gelombang dua dimensi dapat dihitung menggunakan Teori Gelombang Stream Function dengan diketahuinya apparent wave period Tapp,
ketinggian gelombang H ,kedalaman saat badai d.
Dalam banyak kasus, teori gelombang Stokes orde ke-5 akan menghasilkan keakuratan hasil yang dapat diterima. Gambar 2.6 menunjukkan daerah aplikasi dari Stokes orde ke-5 dan berbagai derajat dari penyelesaian Stream Function pada bidang H/gTapp2,d/gTapp2.
Gambar 2. 6 Diagram penentuan teori gelombang aplikasi 2.2.5.6 Faktor Kinematika Gelombang
Kinematika gelombang umum dua dimensi dari teori gelombang Stream Function atau Stokes orde ke-5 tidak memperhitungkan penyebaran arah gelombang atau ketidakseragaman dalam bentuk profil gelombang. Karakteristik nyata ini dapat dimodelkan dalam analisis gelombang deterministik dengan mengalikan kecepatan dan percepatan mendatar dari penyelesaian gelombang dua dimensi umum dengan faktor kinematika gelombang. Pengukuran kinematika gelombang memiliki faktor berkisar antara 0,85 sampai 0,95 untuk badai tropis dan 0,95 sampai 1,0 untuk badai bukan tropis.
2.2.5.7 Marine Growth
Semua bagian dari struktur (elemen, konduktor, riser, struktur tambahan, dan lain-lain) yang berada dibawah permukaan laut tertinggi, luas penampangnya diperbesar dikarenakan adanya marine growth. Diameter efektif dari elemen adalah D = Dc + 2t, dimana Dc adalah diameter luar dan t adalah ketebalan
marine growth rata-rata yang dapat diperoleh dari pengukuran keliling dengan
pita pengukur.
2.2.5.8 Koefisien Hidrodinamik
Pembebanan pada struktur yang diakibatkan oleh gelombang merupakan hasil dari daerah tekanan yang dihasilkan oleh gelombang. Beberapa mekanisme terpisah telah diidentifikasikan dalam kejadian ini. Terdapat komponen gaya seret yang bersesuaian dengan daerah terpaan dari badan struktur dan kuadrat dari kecepatan arus. Hal ini muncul dari gangguan arus akibat badan struktur. Gaya inersia terdiri dari dua komponen, yaitu gaya yang seharusnya bekerja pada massa air yang telah digantikan oleh badan struktur, atau gaya Froude-Krylof, dan gaya yang bekerja pada massa air yang ditahan oleh badan struktur atau disebut gaya massa tambahan. Beberapa faktor yang mempengaruhi besar dari gaya seret adalah koefisien, CD, dan ukuran dari elemen, A, atau dalam kasus ini yang merupakan obyek silinder adalah diameter elemen, D. Dan beberapa faktor yang mempengaruhi besar gaya inersia adalah koefisien inersia, CM, dan volume yang dipindahkan elemen, V.
Untuk situasi desain biasa, gaya gelombang global dapat diperhitungkan dengan menggunakan nilai-nilai berikut ini, untuk silinder yang tidak tertutup.
Halus CD = 0.65 CM = 1.6 Kasar CD = 1.05 CM = 1.2
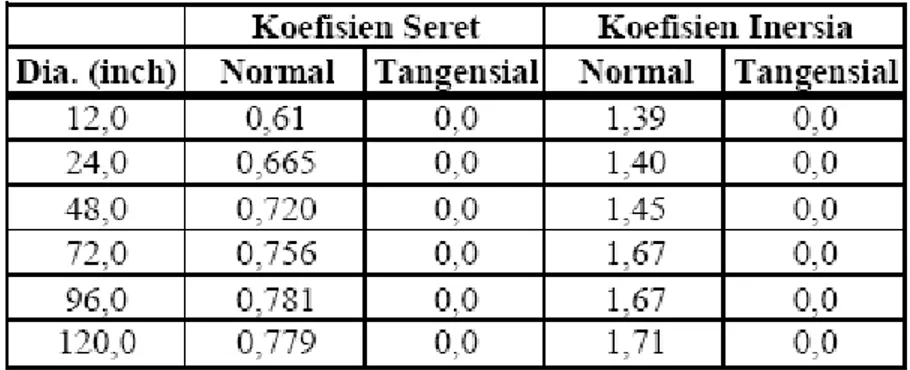
Banyak bukti eksperimen telah menunjukkan bahwa nilai dari koefisien hidrodinamik tidak tetap dan berubah mengikuti diameter elemen dan bilangan
Reynolds. Tabel 2.5 memberikan nilai CD dan CM untuk berbagai diameter.
Tabel 2. 5 Koefisien Hidrodinamik API
2.2.5.9 Gaya Gelombang Pada Tiang Silinder Tegak
Gambar 2. 7 Gaya gelombang pada tiang silinder tegak
Gaya pada tiang silinder tegak akibat gelombang pertama kali diperkenalkan oleh Morison dengan batasan diameter tiang relatif kecil dibandingkan panjang gelombang yang menerpa tiang.
f = d m ax D C U U D C 4 2 1 π 2 ρ ρ + (2.30) keterangan:
ρ = kerapatan massa fluida
U = kecepatan partikel air pada kedalaman tertentu, tegak lurus terhadap tiang
ax = percepatan partikel air pada kedalaman tertentu, tegak lurus terhadap tiang
D = diameter tiang
Cm = koefisien inersia Cd = koefisien seret
Suku pertama dari ruas kanan pada persamaan Morison merupakan komponen gaya seret (drag force) yang besarnya sebanding dengan kuadrat kecepatan partikel. Tanda harga absolut digunakan untuk memastikan arah komponen gaya seret sesuai dengan arah kecepatan partikel. Suku kedua dari ruas kanan merupakan komponen gaya inersia yang besarnya sebanding dengan percepatan partikel air.
Modifikasi nilai koefisien seret dan inersia diperlukan apabila pada batang tubular tersebut terdapat tambahan struktur atau komponen lain, misalnya anoda. Modifikasi koefisien seret dan inersia tersebut ditentukan dengan rumusan sebagai berikut: Cd’ = 1 2 2 1 1 A C nA C A d + d (2.31) Cm’ = 1 2 2 1 1 V C nV C V m + m (2.32) keterangan:
A1 = luas seret batang tubular Cd1 = koefisien seret batang tubular A2 = luas seret komponen / anoda Cd2 = koefisien seret komponen / anoda V1 = volume batang tubular
Cm1 = koefisien massa batang tubular V2 = volume komponen / anoda
Cm2 = koefisien massa komponen / anoda n = jumlah komponen / anoda
Gaya total F diperoleh dengan cara mengintegrasikan persamaan Morison sepanjang elemen struktur. Pada gambar silinder tegak diatas, gaya total dihitung dengan mengintegrasikan persamaan Morison dari z = 0 sampai z = z.
F= f
( )
zdz z∫
0
(2.33)
Dengan cara yang sama, momen total M pada z = 0 (sea floor) akibat gaya gelombang yang bekerja sepanjang z = 0 sampai dengan z = z adalah,
M = zf
( )
zdz z∫
0
(2.34)
Titik tangkap resultan gaya gelombang yang bekerja pada tiang silinder tegak dihitung dengan persamaan
F M z=
(2.35) dimana z dihitung dari dasar tiang (sea floor)
2.2.5.10 Gaya Akibat Gelombang Linier (Airy)
Misalkan gelombang permukaan yang terjadi adalah gelombang linier dengan parameter-parameter antara lain tinggi gelombang H, frekuensi gelombang ω, bilangan gelombang k, dan kedalaman perairan h dengan mengambil x = 0 sebagai posisi / lokasi tiang silinder, maka gaya total yang terjadi pada tiang tegak adalah,
F = FD + FI (2.36)
dengan komponen gaya seret dari persamaan Morison,
FD =
( )
t t kh kz kh kz H k D CD ω ω ω ρ cos cos sinh 2 sinh 2 sinh 32 2 2 2 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + (2.37)dan komponen gaya inersia akibat gelombang, FI = t kh kz H D k CI
ω
ω
π
ρ
sin sinh sinh 4 2 2 2 (2.38)Momen pada tiang di dasar perairan adalah,
M = MD + MI (2.39) dimana, MD =
( )
H Q t t k D CDω
ω
ω
ρ
cos cos 64 1 2 2 (2.40) MI = D HQ t k CIπ
ω
ω
ρ
sin 4 2 2 2 2 2 − (2.41) Q1 =( )
kh kz kz kz kz 2 2 sinh 1 2 2 cosh 2 sinh 2 − + + (2.42) Q2 = kh kz kz kz sinh 1 cosh sinh − + (2.43)2.2.5.11 Gaya Akibat Gelombang Stokes
Dengan memasukkan komponen kecepatan dan percepatan horisontal partikel air gelombang Stokes pada persamaan Morison, maka gaya pada tiang silinder tegak (x = 0) menjadi, f = R n t k D C t n t m U U k D C n n I m m n n m D
ω
ω
ρ
π
ω
ω
ρ
sin 8 cos cos 2 5 1 4 1 5 1 2 2∑
∑∑
= = − = − (2.44)dimana koefisien Un dan Rn didefinisikan pada persamaan 2.21 dan 2.25. Sesuai dengan teori Stokes orde ke-5, perkalian UmUn untuk m+n > 5 diabaikan. Maka dari persamaan 3.30 didapat,
F(z) = FD(z) + FI(z) (2.45) FD = A m t n t k D C m m n mn D
ω
ω
ω
ρ
cos cos 2 4 1 5 1 3 2∑∑
= − = (2.46)FI = - B n t k D C n n I
π
ω
ω
ρ
sin 4 5 1 2 2 2∑
= (2.47)Koefisien Amn (untuk m ≠ n) dan Ann (untuk m = n) adalah,
Amn = n m n m n m n m n m n m n n m m G n m W S G n m W S S G S G − − − + + + − + + ) ( ) ( 2 (2.48) Ann = 2 4 2 2 2 2 2 kz nG W S S G n n n n n + (2.49) Sn = sin nkh (2.50) Wn = koefisien kecepatan = nkh nkz Gn sinh sinh (2.51) Koefisien Bn adalah, B1 = W1 - 5 3 2 5 5 3 2 3 2 1 3 3 2 1 10 1 6 1 W S S S G G G W S S S G G G − B2 = W2 - 4 3 1 4 4 3 1 2 1 2 1 4 1 2 1 W S S S G G G kz S G − B3 = W3 - 5 4 1 5 5 4 1 1 2 2 10 3 2 3 W S S S G G G W S G − (2.52) B4 = W4 - 2 3 1 2 2 3 1 2 2 2 2 2 1 W S S S G G G kz S G − B5 = W5 - 3 4 1 3 3 4 1 1 3 2 1 1 3 2 6 5 2 5 W S S S G G G W S S S G G G −
Karena bentuk persamaan yang komplek, perhitungan gaya dan momen maksimum akan sulit dilakukan seperti pada perhitungan gaya akibat gelombang linier. Dalam hal ini, lebih baik menggunakan metoda numerik dimana tiang silinder dibagi menjadi N segmen dan menghitung gaya pada setiap segmen dengan menggunakan persamaan 2.45 pada saat (t) gaya maksimum terjadi dan menganggap gaya yang terjadi merata sepanjang tiap segmen. Momen pada dasar tiang bisa didapat dengan menjumlahkan momen dari tiap segmen. Dengan menganggap gaya tersebut terdistribusi secara merata, titik tangkap gaya resultan
akan terletak ditengah setiap segmen sehingga momen pada tiang di dasar perairan dapat dituliskan sebagai berikut,
M = 1 1
(
2 1)(
2 1)
2 1 2 1 z z F F z F + − + (2.53)Harga t harus dicari dimana gaya yang terjadi maksimum. Secara umum, momen yang terjadi pada dasar tiang bila kita membagi tiang menjadi N segmen adalah,
M =
(
)(
1)
1 1 2 1 − = − − −∑
n n N n n n F z z F (2.54) dengan F0 = 0 dan z0 = 02.2.5.12 Gaya Gelombang Pada Tiang Silinder Miring
Penerapan persamaan Morison pada tiang silinder miring dilakukan pada saat menghitung gaya gelombang pada ”cross brcing” struktur atau pada kaki jacket yang tidak tegak (battered). Chakrabarti dkk. (1975) mengembangkan metoda penerapan persamaan Morison untuk menentukan gaya gelombang pada tiang miring dengan menguraikan kecepatan dan percepatan partikel kedalam komponen tegak lurus dan sejajar / tangensial sumbu tiang silinder. Kemudian, hanya komponen kecepatan dan percepatan partikel yang tegak lurus tiang silinder yang digunakan untuk menentukan gaya per satuan panjang pada tiang silinder miring.
Arah gaya yang bekerja adalah tegak lurus terhadap sumbu tiang dan sesuai dengan arah komponen kecepatan dan percepatan partikel tegak lurus sumbu tiang silinder miring. Untuk keperluan analisa struktur, gaya tersebut bisa disesuaikan lagi kedalam komponen gaya vertikal dan gaya horisontal.
Perhatikan tiang miring pada gambar 2.8. Misalkan gelombang bergerak dalam arah sumbu +x, sehingga terdapat komponen horisontal dan vertikal kecepatan (u dan v) dan percepatan (ax dan ay) partikel air akibat gelombang.
Dengan menggunakan sistem koordinat polar dan sudut θ dan β untuk mendefinisikan orientasi dari sumbu tiang, besar kecepatan partikel arah tegak lurus / normal sumbu tiang adalah,
Vn =
[
u2 v2(
c u c v)
2]
12y
x +
−
+ (2.55)
komponen kecepatan pada arah x, y dan z adalah sebagai berikut, un = u – cx (cxu + cyv) vn = v – cy (cxu + cyv) (2.56) wn = – cz (cxu + cyv) dimana, cx = sin β cos θ cy = cos β (2.57) cz = sin β sin θ
Percepatan partikel arah normal sumbu tiang silinder dapat diuraikan kedalam komponen dalam arah x, y dan z sebagai berikut,
anx = ax – cx (cxax + cyay)
any = ay – cy (cxax + cyay) (2.58)
anz = - cz (cxax + cyay)
Maka komponen gaya per satuan panjang dalam arah x, y dan z adalah,
fx = CDDVnun CI D anx 4 2 1 π 2 ρ ρ + fy = D n n I any D C v DV C 4 2 1
π
2ρ
ρ
+ (2.59) fz = CDDVnwn CI D az 4 2 1 π 2 ρ ρ +Komponen total gaya yang bekerja pada tiang silinder miring harus dihitung dengan cara integrasi numerik berdasarkan persamaan berikut,
Fx = f ds s x
∫
Fy = f ds s y∫
(2.60) Fz = f ds s z∫
dimana variabel s menunjukan integrasi sepanjang tiang silinder.
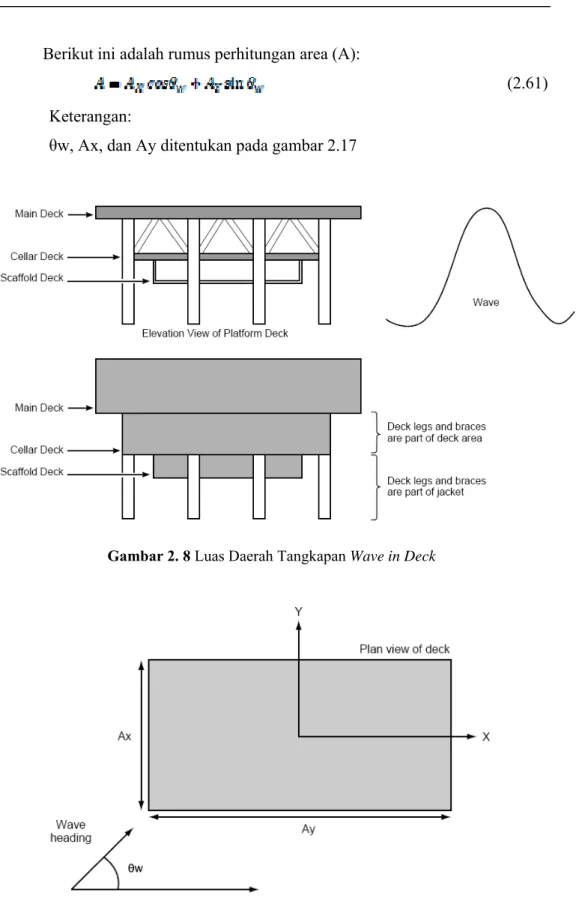
2.2.5.13 Gaya Gelombang Pada Deck
Prosedur perhitungan gaya gelombang pada deck tergantung pada tinggi puncak gelombang (Wave Crest). Tinggi puncak gelombang harus dihitung menggunakan teori gelombang berdasarkan API RP 2A-WSD (kinematika gelombang dua dimensi), tinggi gelombang untuk analisis tegangan ultimat, periode gelombang, kondisi pasang saat badai.
Langkah-langkah perhitungan gaya pada deck berdasarkan API RP 2A-WSD adalah sebagai berikut:
1. Dari data tinggi puncak gelombang (wave crest), hitung luas daerah tangkapan gelombang pada deck (A), dengan arah gelombang yang terjadi (θw).
Luas daerah tangkapan gelombang pada deck berupa daerah arsiran pada gambar 2.16, luas antara daerah scaffolding deck terbawah sampai
equipment tertinggi pada main deck atau sampai elevasi puncak
gelombang (wave crest) apabila elevasi puncak gelombang dibawah elevasi Main Deck.
Area deckleg dan bracing di atas cellar deck adalah bagian dari luas daerah tangkapan. Deckleg dan bracing yang berada di bawah cellar deck harus dimodelkan bersama dengan member jacket dalam prosedur perhitungan gaya pada jacket. Struktur rangka batang tambahan di atas equipment pada
Berikut ini adalah rumus perhitungan area (A):
(2.61) Keterangan:
θw, Ax, dan Ay ditentukan pada gambar 2.17
Gambar 2. 8 Luas Daerah Tangkapan Wave in Deck
2. Menggunakan teori gelombang berdasarkan API RP 2A-WSD dan menghitung maksimum kecepatan gelombang arah horizontal, V, pada elevasi puncak gelombang (wave crest) atau main deck teratas, dicari nilai elevasi terendah dari kedua elevasi tersebut.
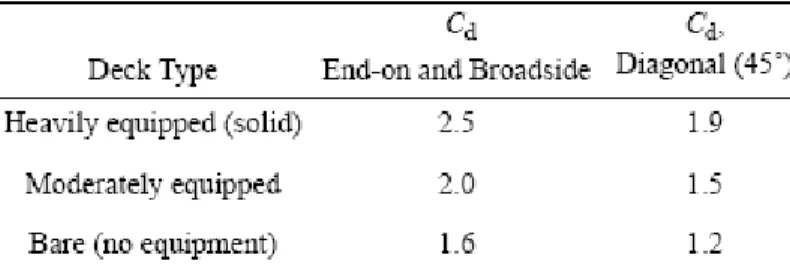
3. Gaya gelombang pada deck, Fdk dihitung sebagai berikut:
(2.62) Keterangan:
U = Kecepatan arus sejajar dengan gelombang
awkf = Faktor kinematik gelombang (0.88 untuk hurricane & 1 untuk winterstorm)
αcbf = Current blockage factor untuk jacket
ρ = Massa jenis air laut
Tabel 2. 6 Koefisien Cd Untuk Gaya Gelombang/Arus di Deck
4. Gaya Fdk diberikan pada elevasi Zdk di atas cellar deck terbawah. Zdk
ditentukan sebesar 50% jarak antara titik terendah luas daerah tangkapan dan tinggi puncak gelombang terendah atau main deck teratas.
2.2.6 Arus
Arus, relatif memiliki pergerakan yang konstan. Arus di laut biasanya terjadi akibat adanya pasang surut dan gesekan angin pada permukaan air (wind-drift
current). Kecepatan arus bekerja pada arah horisontal dan bervariasi menurut
kedalaman. Besar dan arah arus pasang surut dipermukaan biasanya ditentukan berdasarkan pengukuran di lokasi. Wind-drift current di permukaan biasanya diasumsikan sekitar 1 % dari kecepatan angin pada ketinggian 30 ft diatas permukaan air. Untuk kebutuhan rekayasa, variasi arus pasang surut terhadap kedalaman biasanya diasumsikan mengikuti profil pangkat 1/7 ("one-seventh
power law") dan variasi arus akibat gesekan angin diasumsikan linier terhadap
kedalaman.
Gambar 2. 10 Variasi arus
Dalam kondisi badai, arus terjadi bersamaan dengan gerakan air akibat gelombang. Arah arus pasang surut bisa tidak sama dengan arah rambat gelombang, tetapi wind-drift current biasanya diasumsikan searah dengan gerakan gelombang. Arus yang terjadi bersamaan dengan gelombang akan mempengaruhi karakteristik gelombang. Besar pengaruh arus terhadap gelombang tergantung pada rasio kecepatan maksimum arus terhadap kecepatan gelombang. Namun pengaruh arus bisa diabaikan untuk kondisi gelombang saat badai (storm). Sehingga untuk kebutuhan desain, dalam perhitungan gaya akibat arus dan gelombang yang bekerja pada struktur dilakukan dengan menambahkan kecepatan arus dengan kecepatan horisontal akibat gelombang. Metoda ini sesuai dengan API RP2A-WSD yang ditunjukkan pada Gambar 2.6.
2.2.6.1 Current Blockage Factor
Kecepatan arus disekitar anjungan berkurang akibat faktor hambatan (Current
Blockage Factor). Dengan kata lain, kehadiran struktur mengakibatkan arus
menyebar, sebagian arus mengelilingi struktur dan tidak melaluinya, dan kecepatan arus disekitar struktur berkurang. Current Blockage Factor dihitung dengan menggunakan persamaan berikut:
(
)
1 4 1 − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ +∑
W D Cd i (2.63)Dimana Σ(CdD)i adalah penjumlahan dari “drag diameter” dari seluruh elemen
yang terpotong oleh suatu bidang mendatar tertentu dan W merupakan lebar keseluruhan dari anjungan, tegak lurus terhadap arus pada elevasi tersebut.
2.2.6.2 Kinematika Gelombang dan Arus Gabungan
Kinematika gelombang yang telah disesuaikan dengan penyebaran arah dan ketidakseragaman, harus digabungkan dengan profil arus yang telah disesuaikan dengan faktor hambatan. Karena profil arus hanya ditentukan untuk kedalaman air rata-rata pada kriteria disain, harus digunakan beberapa cara untuk memperpanjang atau memperpendek profil arus tersebut terhadap ketinggian gelombang lokal.
Untuk profil arus dimana perpanjangan linier merupakan pendekatan yang dapat diterima, Vz arus pada jarak z diatas kedalaman laut rata-rata, dapat
diperhitungkan dari profil arus yang telah ditentukan pada elevasi z’ dengan menggunakan persamaan di bawah ini:
Vx =
(
(
) (
)
)
η + + + d d d z d z Vz ' ' (2.64) keterangan:Vz’ = arus tertentu pada elevasi z’ d = kedalaman air pada saat badai
η = jarak antara permukaan gelombang dengan kedalaman laut rata-rata
(η dan z positif diatas kedalaman laut rata-rata dan sebaliknya) Penelitian telah menunjukkan bahwa sebuah profil arus yang diperpanjang secara non-linier cocok digabungkan dengan kinematika gelombang yang telah terpengaruh Doppler. Perpanjangan non-linier memperhitungkan arus yang telah
dipanjangkan, Vz, untuk sebuah partikel yang berada pada elevasi z, berdasarkan kecepatan Vz’ yang telah ditentukan di profil arus pada elevasi z’ sebagai berikut:
Vz = Vz’
(
(
(
)
)
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + m m d d z z z λ π λ π η / 2 sinh / ' 2 sinh ' (2.65)dimana λm adalah panjang gelombang untuk ketinggian H dan perioda Tapp tertentu.
2.2.7 Gaya Apung
Tekanan air pada struktur yang tenggelam, timbul karena berat air diatasnya dan pergerakan fluida di sekitar struktur yang diakibatkan oleh gelombang. Tekanan air pada struktur yang tenggelam dapat memperbesar tegangannya. Gaya yang diakibatkan oleh gelombang telah dihitung di dalam persamaan Morison sedangkan gaya apung yang diakibatkan oleh berat air diatasnya diperhitungkan dengan menggunakan persamaan berikut:
Fb = γf V (2.66)
keterangan:
γf = berat jenis fluida
V = volume struktur yang tenggelam
2.3 KOMBINASI PEMBEBANAN
Anjungan harus didesain dengan kombinasi pembebanan yang akan menghasilkan efek yang paling membahayakan bagi struktur. Kombinasi pembebanan ini terdiri dari beban lingkungan, beban mati dan beban hidup yang sesuai.
Beban lingkungan harus dikombinasikan dengan cara yang sesuai dengan kemungkinan kejadian tersebut terjadi bersamaan selama kondisi pembebanan yang sedang dipertimbangkan.
Pembagian beban yang akan dikombinasikan: 1. Beban gravitasi
Beban gravitasi ini terdiri dari: a. Berat sendiri platform . b. Beban peralatan.
c. Beban lain-lain (perubahan desai n, perubahan fabrikasi, berat , dan lain-lain).
2. Beban angin
• Dianalisis untuk kondisi operasional dan kondisi ekstrim. • Beban angin ini bekerja pada 12 mata angin. Setiap arahnya
diproyeksikan pada arah x dan arah y.
• Koefisien untuk beban angin ini dibedakan berdasarkan arah angin yang sedang ditinjau. Hal ini dilakukan agar desain yang dihasilkan lebih akurat dan menyerupai kondisi sebenarnya. • Penting untuk diperhatikan formula yang akan dipakai dalam
analisis beban angin. 3. Beban gelombang dan arus
• Dianalisis untuk kondisi operasional dan kondisi ekstrim. • Dianalisis pada 12 mata angin.
• Koefisien untuk beban gelombang dan arus diperoleh dari besarnya Dynamic Amplification Factor (DAF), yang nilainya sudah diasumsikan sebelumnya. Besar DAF untuk kondisi operasional dan ekstrim memiliki nilai yang berbeda.
Tiap elemen anjungan harus didesain dengan kombinasi pembebanan yang mengakibatkan tegangan terbesar pada elemen, dengan turut mempertimbangkan tegangan izin untuk kondisi pembebanan yang mengakibatkan tegangan tersebut. Kombinasi pembebanan pada umumnya terbagi menjadi:
1. Kombinasi pembebanan antara beban lingkungan, beban mati, dan beban hidup maksimum saat operasi normal.
2. Kombinasi pembebanan antara beban lingkungan, beban mati, dan beban hidup minimum saat operasi normal.
3. Kombinasi pembebanan antara beban lingkungan, beban mati, dan beban hidup maksimum pada kondisi ekstrim.
4. Kombinasi pembebanan antara beban lingkungan, beban mati, dan beban hidup minimum pada kondisi ekstrim.
Adapun komponen penyusun dari kombinasi pembebanan: a. Komponen akibat beban gravitasi.
b. Untuk kondisi operasional, beban gravitasi yang digunakan adalah beban gravitasi maksimum, sedangkan untuk kondisi ekstrim, beban gravitasi yang digunakan adalah beban gravitasi minimum. c. Komponen akibat beban angin yang sudah diproyeksikan pada arah
x dan arah y.
d. Komponen akibat beban gelombang dan arus pada arah mata angin yang sedang ditinjau.
2.4 TEORI ANALISIS LINIER
Struktur lepas pantai biasanya menggunakan baja struktur biasa. Material baja akan tetap bersifat elastis selama tegangan yang terjadi tidak melampaui tegangan leleh. Tujuan utama dari desain adalah memiliki ukuran komponen yang sesuai, sehingga kondisi elastis tetap dipenuhi selama di bebani beban rencana
mendapatkan tegangan ijin (allowable stress = yield stress / safety factor) yang kemudian dijadikan kriteria tegangan yang tidak boleh dilewati selama struktur dibebani gaya rencana.
Filosofi perencanaan yang diterapkan dalam merancang fixed platform yang akan dibahas dalam laporan ini adalah filosofi tegangan kerja / elastis (working stress
design —WSD). Menurut filosofi ini, elemen struktural harus direncanakan
sedemikian rupa sehingga tegangan yang dihitung akibat beban kerja tidak melampaui tegangan izin yang diberlakukan.
Tegangan izin ini ditentukan oleh peraturan bangunan atau spesifikasi (seperti dalam AISC) untuk mendapatkan faktor keamanan terhadap tercapainya tegangan batas, seperti tegangan leleh minimum atau tegangan buckling (tekuk). Tegangan yang dihitung harus berada dalam batas elastis. Misalnya pada sebuah balok, kriteria aman dalam perencanaan WSD bisa dinyatakan sebagai
(2.67)
Dengan fb adalah tegangan di serat terluar dari penampang balok akibat momen
beban kerja maksimum M yang dihitung dengan menganggap balok bersifat elastis, c adalah jarak dari garis netral balok ke serat terluar, dan I adalah momen inersia penampang balok. Tegangan izin Fb diperoleh dengan membagi tegangan
batas (seperti tegangan batas Fb atau tegangan tekuk Fcr) terhadap faktor
keamanan.
2.4.1 Batang Tarik
Batang tarik lazim dijumpai pada struktur baja sebagai member (batang) struktural pada struktur rangka berjenis menara. Keadaan batas kekuatan yang berpengaruh bagi suatu batang tarik dapat berupa (a) pelelehan penampang lintang bruto batang pada tempat yang jauh dari titik sambungan dan retakan dari suatu luas bersih
efektif (yakni melalui lubang-lubang) pada sambungan. Bila keadaan batasnya adalah pelelehan umum dari penampang lintang bruto atas panjang batang, seperti halnya untuk batang tarik tanpa pelubangan (dengan sambungan las), kekuatan batas Tu dapat dinyatakan sebagai
(2.68)
dengan Ag adalah luas penampang bruto dan Fy adalah tegangan leleh baja. Beban kerja yang aman T dapat dihitung dengan membagi kekuatan dengan faktor keamanan, yaitu
(2.69)
Untuk batang silinder yang mengalami beban tarik, formula API RP 2A-WSD dalam menentukan tegangan tarik ijin Ft dapat dituliskan sebagai berikut:
(2.70)
Batas tegangan ijin tersebut menerapkan angka keamanan sebesar 1,67.
2.4.2 Batang Tekan
Pada umumnya batang tekan akan mengalami buckling (tekuk) atau lenturan tiba-tiba akibat ketidakstabilan sebelum mencapai kekuatan penuh material baja tersebut. Hanya batang yang sangat pendek saja yang dapat dibebani sampai ke tegangan lelehnya. Karena itu diperlukan pengetahuan yang mendalam tentang stabilitas batang tekan untuk desain batang tekan dalam struktur baja.
2.4.2.1 Tekuk Kolom dan Tekuk Lokal
Berdasarkan API RP 2A-WSD, untuk elemen dengan rasio D/t kurang dari atau sama dengan 60, tegangan tekan izin, Fa, harus dihitung dengan persamaan AISC berikut:
(2.71)
(2.72)
dimana:
(2.73)
E = Modulus Elastisitas Young, ksi (MPa) K = faktor panjang efektif
L = panjang batang tak tersokong (unbraced), in. (m) r = radius girasi, in. (m)
Untuk elemen dengan rasio 60 < D/t ≤ 300 dan tebal silinder t ≥ 0,25 in (6 mm), ganti tegangan tekuk lokal kritis (Fxe dan Fxc diambil yang lebih kecil) untuk Fy
dalam menentukan Cc dan Fa. Rumus Fxe atau Fxc diberikan sebagai berikut:
Tegangan Tekuk Lokal Elastis, Fxe
(2.74)
Secara teoritis, nilai C = 0,6. Namun demikian, reduksi nilai C = 0,3 diizinkan untuk memperhitungkan pengaruh ketidaksempurnaan geometrik.
Tegangan Tekuk Lokal Inelastis, Fxc
2.4.2.2 Panjang Efektif
Pembahasan mengenai kekuatan batang tekan di atas menggunakan batang dengan tumpuan sendi pada kedua ujungnya sehingga tidak ada kekangan rotasional atau momen pada kedua ujung batang tersebut. Untuk batang tekan atau kolom dengan ujung tumpuan sendi, panjang ekivalennya Kl adalah sama dengan panjang l. Maka dalam hal ini harga K adalah 1,0. Panjang ekivalen batang tekan dengan ujung tumpuan sendi disebut sebagai panjang efektif dan K disebut sebagai faktor panjang efektif.
Untuk kondisi struktur pada umumnya, terjadi kekangan momen pada ujung-ujung batang tekan atau kolom sehingga menyebabkan titik momen nol atau titik balik ( inflection point ) bergerak menjauhi ujung-ujung yang ditahan. Kondisi ini bisa dilihat pada Gambar 2.9, dimana panjang efektif Kl tereduksi.
Penilaian secara tepat mengenai derajat kekangan momen pada struktur pada umumnya sangat sulit atau bahkan tidak mungkin. Kekangan momen tersebut dipengaruhi oleh batang-batang yang tidak berdekatan yang mengikat ke batang tekan atau kolom, oleh pondasi setempat dan lapisan tanah di bawahnya, dan interaksi penuh semua batang dalam struktur rangka baja.
Gambar 2. 11 Faktor panjang efektif Tabel 2. 8 Faktor Panjang Efektif
Situasi Faktor Panjang Efektif (K) Faktor Reduksi (C
m)
Kaki Struktur Atas
Terkekang 1,0 (a)
Portal (tak terkekang) K (a)
Tiang dan Kaki Platform
Penampang Komposit 1,0 (c)
Kaki Platform Ungrouted 1,0 (c)
Tiang Pancang Ungrouted 1,0 (b)
Elemen Web Penopang Deck
Aksi In-Place 0,8 (b)
Aksi Out-of-Place 1,0 (a) atau (b) Penguat Brace
0,8 (a) atau (b)
Panjang Face-toFace dari Diagonal Utama
Untuk K Brace 0,8 (c)
Segmen lebih panjang dari
X Brace 0,9 (c)
Nilai Faktor reduksi Cm ditujukan untuk tabel 2.8, adapun penjelasan notasi pada Tabel 2.8 adalah:
a. 0,85
b. 0,6-0,4 , tetapi tidak boleh kurang dari 0,4 dan tidak boleh lebih dari 0,85
c. 1-0,4 , atau 0,85, yang manapun lebih kecil
2.4.3 Tegangan Lentur
Tegangan lentur izin, Fb, harus dihitung dengan menggunakan persamaan:
(2.76)
2.77)
(2.78)
2.4.4 Kombinasi Beban Lentur dan Aksial
Hampir semua batang dalam sebuah struktur terkena momen lentur dan beban aksial (tarik atau tekan) sekaligus. Gaya tekan aksial akan menambah momen lentur yang besarnya sama dengan gaya tekan aksial dikali defleksi. Berikut adalah beberapa kemungkinan kombinasi beban aksial dan lentur, serta beberapa kecenderungan model kegagalannya.
b. Tekan aksial dan lentur. Biasanya gagal karena tekuk pada bidang lentur.
c. Tekan aksial dan lentur bi-aksial pada penampang yang kaku terhadap puntir. Biasanya gagal karena tekuk pada salah satu arah utama.
2.4.4.1 Kombinasi Tekan Aksial dan Lentur
Berdasarkan API RP 2A-WSD, dalam mendesain suatu batang tubular yang dikenai kombinasi tekan dan lentur harus memenuhi persyaratan berikut:
(2.79)
Apabila , maka persamaan inilah yang digunakan menggantikan kedua persamaan di atas:
(2.80)
Persamaan tersebut mengasumsikan kalau nilai yang sama dari Cm dan Fe sesuai
untuk fbx dan fby. Jika nilai lain dapat diterapkan, maka persamaan berikutlah yang
digunakan menggantikan persamaan sebelumnya:
(2.81)
Parameter yang digunakan dalam persamaan di atas adalah sebagai berikut: Fa = tegangan izin aksial
Fb = tegangan izin terhadap momen
fa = tegangan aksial yang terjadi
Cm = faktor reduksi / pembesaran momen yang berkaitan
dengan kekangan`ujung Fe’ = Euler buckling stress
2.4.4.2 Kombinasi Tarik Aksial dan Lentur
Batang ubular yang dikenai kombinasi tarik aksial dan lentur, berdasarkan API RP 2A-WSD harus memenuhi persamaan berikut:
(2.82)
Komponen dari persamaan di atas harus dientukan berdasarkan kondisi tarik pada batang tubular.
2.4.5 Tarik Aksial dan Tekanan Hidrostatis
Pada saat tegangan regangan elemen longitudinal dan keruntuhan terjadi bersamaan, persamaan interaksi berikut di bawah ini harus dipenuhi:
(2.83) dimana:
A harus dapat menunjukkan kombinasi regangan maksimum
v = rasio Poisson = 0,3 Fy = kuat leleh, ksi (MPa)
fa = nilai absolut untuk tegangan aksial, ksi (MPa)
fb = nilai absolut untuk yang diakibatkan oleh tegangan lentur,
ksi (MPa)
fh = nilai absolut untuk tegangan tekan, ksi (MPa)
Fhc = tegangan hoop kritis
2.4.6 Tekan Aksial dan Tekanan Hidrostatis
Pada saat tegangan tekan longitudinal dan tegangan tekan hoop terjadi bersamaan, maka persamaan di bawah ini harus dipenuhi:
(2.84) Persamaan di atas seharusnya menunjukkan kombinasi tegangan tekan terbesar. Pada saat fx > 0,5 Fha, persamaan ini harus terpenuhi:
(2.85)
dimana:
SFx = faktor keamanan untuk tekan aksial
SFh = faktor keamanan untuk lentur
fx = fa + fb + (0,5fh), fx seharusnya menunjukkan kombinasi
tegangan tekan maksimum Fxe = 2CE t/D
Fxc = Fy [1,64-0,23(D/t)1/4] ≤ Fxe
2.5 TEORI ANALISIS NON LINIER (PUSHOVER)
Kejadian leleh pertama pada titik tekanan tertinggi pada komponen struktur sering dijadikan ukuran kapasitas struktur. Banyak komponen yang mengalami hal ini berulang-ulang. Komponen ini mampu menyalurkan ulang tegangan dan beban-beban melalui garis lurus saat beberapa bagian mulai untuk leleh. Pada kasus seperti ini, leleh pertama merupakan kriteria konservatif. Salah satu contoh yang untuk transisi ini dari leleh fiber pertama hingga kondisi plastis penuh pada balok akibat momen. Jika garis lurus ditujukan untuk kombinasi beban-beban misal, gaya aksial dan momen, maka penyaluran ulang beban terjadi di antara keduanya. Hal ini sangat penting karena disipasi energi menjadi terpusat dibandingkan tahanan maksimum.
Gambar 2. 12 Definisi Kapasitas Ultimate
2.5.1 Reserve Strength Ratio
Dalam menilai kemampuan struktur untuk menahan beban-beban berlebih pada beban rencana atau untuk menyokong beban dalam keadaan dibutuhkan, bebrapa penukurn atas kemampuan ini membutuhkan kekuatan cadangan.
Kekuatan cadangan biasanya didefinisikan sebagai kemampuan struktur untuk menahan beban-beban berlebih pada perencanaan (Billington 1993). Tahanan cadangan muncul saat tingkat komponen dimana ketidakpastian pada tahanan komponen dan komponen yang dikenakan pembebanan diperbolehkan. Berdasarkan data statistik, nilai karakteristik diadopsi untuk memastikan bahwa kemungkinan kegagalan dapat diterima. Di luar hal tersebut, faktor keamanan diaplikasikan untuk meningkatkan kepastian bertahan dan untuk menerima faktor-faktor untuk hal-hal yang tidak ada pada data statistik. Sudah jelas bahwa kapasitas aktual komponen mampu melampaui beban-beban yang yang diizinkan pada komponen dimana beban tersebut direncanakan.
Pada tingkat sistem, bagaimanapun terdapat tambahan sumber tahanan cadangan. Kegagalan salah satu komponen tidak membatasi kapasitas seluruh struktur melainkan terdapat redundansi dan daktilitas yang cukup seperti beban-beban yang bisa disalurkan ulang. Untuk struktur yang lebih rumit, kejadian kegagalan komponen mungkin dibutuhkan sebelum kondisi ultimate dicapai. Kapasitas elastis rencana dibatasi oleh teori kejadian kegagalan komponen pertama sehingga
Reserve Strength Ratio (RSR) dapat ditetapkan sebagai berikut:
(2.86)
Hal ini sama dengan faktor tahanan ekivalen kekuatan cadangan (Resistance
Equivalent Factor / REF) yang didefinisikan oleh Llyod dan Clawson (1984)
sebagai berikut:
Kriteria yang bisa diterima berdasarkan API RP 2A-WSD RSR harus melebihi 1,6.
Pada literatur, RSR diukur sebagai variasi cara dan selain dari rasio beban yang menyebabkan keruntuhan pada beban rencana. RSR juga dikutip sebagai istilah geser dasar pada platform atau disebut sebagai overtunning momen. Pengukuran semacam RSR dapat membimbing dalam kesulitan membandingkan konfigurasi struktur alternatif yang memiliki geser dasa atau overtunning momen yang berbeda-beda untuk kasus beban yang diberikan. Oleh karena itu, pendekatan yang lebih konsisten adalah menggunakan rasio terhadap pembebanan yang diaplikasikan menurut Lllyod dan Clawson (1984). Diketahui juga bahwa terdapat RSR yang terpisah untuk tiap kasus atau kombinasi beban. Tentu saja pada kebanyakan kasus beban yang menghasilkan utilisasi komponen terbesar pada tingkat beban rencana bukan merupakan kasus pembebanan yang menghasilkan RSR terendah. Oleh karena itu, seperti yang diilustrasikan nanti, saat menilai RSR maka variasi penuh dari kasus pembebanan harus dipertimbangkan untuk memastikan kasus paling kritis dapat teridentifikasi. Gambar 2.20 berikut ini menggambarkan kekuatan cadangan pada struktur yang diuji coba. Rasio dari kapasitas puncak pada struktur utuh dibandingkan dengan beban rencana (Y vs X) adalah kekuatan cadangan.