SWITCH MODE POWER SUPPLY MENGGUNAKAN BOOST
CONVERTER SEBAGAI PFC CONVERTER
Surya Indrajati
1,Ir.Moh.Zaenal Effendi,MT.
2 1Mahasiswa Jurusan Teknik Elektro Industri,
2Dosen PENS-ITS
Politeknik Elektronika Negeri Surabaya
Institut Teknologi Sepuluh Nopember Surabaya
Kampus ITS Sukolilo Surabaya 60111
Telp (+62) 031-59447280 .Fax (+62) 031-5946114
e-mail: [email protected]
ABSTRAK
Switch mode power supply (SMPS) adalah suatu peralatan untuk memberikan sumber DC dengan cara metode switching. Salah satu masalah yang terjadi pada switch mode power supply (SMPS) tidak menggunakan power factor correction dan memerlukan penambahan nilai Capasitor yang besar sebagai filter DC. Untuk mengatasi masalah tersebut perlu penambahan power factor correction (PFC) pada switch mode power supply (SMPS).
Pada SMPS ini, power factor correction diletakkan pada bagian output dari rectifier dengan menggunakan Boost converter. Boost converter bekerja pada kondisi tidak kontinyu, karena dalam kondisi tidak kontinyu tidak muncul arus balik (IRR) pada komponen diode dari
boost converter, sehinga diode yang lebih murah dapat digunakan. Selain itu pada kondisi tidak kontinyu mengakibatkan rugi I2R rendah dan ripple arus yang rendah mengakibatkan rugi inti di inductor rendah.
Boost converter ini dihubungkan seri dengan buck conveter untuk supply beban 24 V/ 60 W. Boost converter sebagai power factor correction (PFC) di desain menghasilkan tegangan output sebesar 50 V dan arus 3 A. Sedangkan buck converter di desain menghasilkan tegangan keluran 24 V dengan arus 2,5 A.
Kata Kunci: boost converter, buck converter, power factor correction. 1. PENDAHULUAN
Peralatan elektronik modern tidak selalu menghadirkan beban-beban pasif kepada sisi sumber atau power line. Pada awalnya, beban-beban wajar mempunyai salah satu karakteristik resistif seperti misalnya lampu atau arus input yang sinusoidal dan mengalami pergerseran fase seperti misalnya motor AC. Saat ini, kebanyakan sistem elektronik menggunakan satu atau lebih konverter-konverter daya yang menyebabkan arus di sisi sumber atau power line menjadi tidak sinusoidal. Karakteristik arus input ini menyebabkan arus dan kemungkinan tegangan terdistorsi yang dapat menimbulkan masalah pada peralatan elektronik lain yang terhubung dengan sumber dan menurunkan kemampuan dari sistem tersebut. Masalah ini mengharuskan menciptakan desain
standart dengan tujuan membatasi distorsi harmonik pada sisi sumber atau power line. Solusi dari masalah ini dikenalan sebagai power factor correction (PFC).
Switch mode power supply (SMPS)
adalah peralatan listrik yang berfungsi
untuk memberi sumber DC dengan
menggunakan metode switching. Energi
ini berasal dari sumber jala-jala (PLN)
yang disearahkan dengan rangkaian
rectifier. Kelemahan dari SMPS ini
adalah tidak menggunakan rangkaian
power factor correction
dan memerlukan
nilai Capasitor yang besar. Dengan kata
lain energi yang di transfer ke beban
menjadi tidak efisien. Untuk mengatasi
hal ini maka di tambah
power factor
power supply (SMPS).
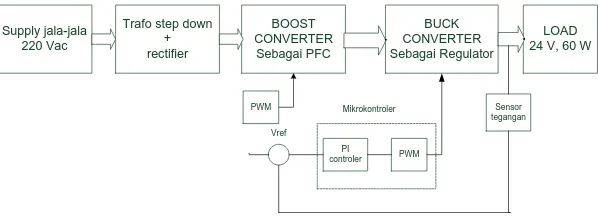
Penambahan power factor correction pada SMPS ini dilakukan dengan memodifikasi pada rangkaian keluaran rectifier. Dengan menambah rangkaian diharapkan dapat mengatasi masalah harmonisa yang timbul dan power factor yang rendah pada sisi sumber (input).2. DESAIN DAN PERENCANAAN Dalam membangun switch mode power supply dengan menggunakan boost converter sebagi PFC converter dibutuhkan komponen seperti gambar 1 blok diagram dibawah ini.
Supply jala-jala 220 Vac
Trafo step down + rectifier BOOST CONVERTER Sebagai PFC BUCK CONVERTER Sebagai Regulator LOAD 24 V, 60 W PWM PWM Sensor tegangan PI controler Mikrokontroler Vref
Gambar 1. blok diagram 2.1perencanaan pembuatan rectifier Rangkaian penyearah digunakan sebagai input sumber DC dari boost converter. Rangkaian penyearah ini diturunkan terlebih dahulu melalui trafo kemudian disearahkan tanpa penambahan bulk capasitor. Gamabr rangkaian dari rangkaian penyearah terlihat pada gambar 2 berikut.
Gambar 2 Rectifier
2.2 Boost converter
Boost converter pada proyek ini digunakan sebagai perbaikan factor daya
yang bekerja pada kondisi tidak kontinyu yang terdiri dari beberapa komponen utama, yaitu mosfet sebagai switch, induktor, kapasitor, diode, dan beban. Gambar rangkaian boost converter terlihat seperti gambar 3.
Gambar 3 Desain boost converter Untuk mendisain converter perlu ditetapkan beberapa variable, yaitu:
Vin minimal : 21,6 V Vin maximal : 33,9 V Arus output : 3 A Tegangan output : 50 V Frekuensi switching : 25 Khz Dari data yang ditetapkan diatas, dapat dihitung nilai-nilai komponen yang digunakan, yaitu:
Duty cycle
Dimana : D : duty cycle Vo : tegangan output Vin : tegangan input Perhitungan :
Nilai inductor
Dimana : L : induktansi inductor
Vo : tegangan output Vin : tegangan input
f : frekuensi switching
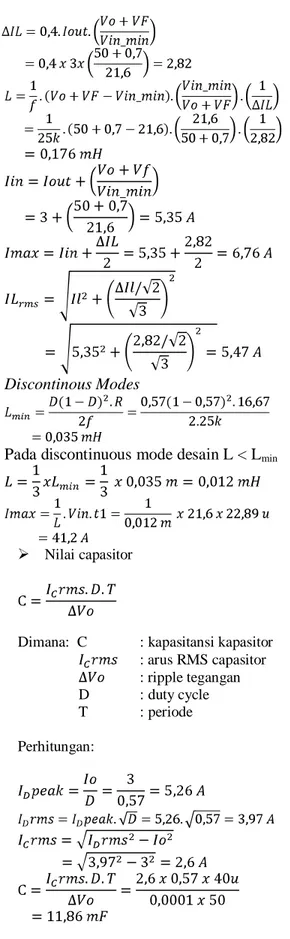
: ripple arus Perhitungan :
Discontinous Modes
Pada discontinuous mode desain L < Lmin
Nilai capasitor
Dimana: C : kapasitansi kapasitor
: arus RMS capasitor : ripple tegangan D : duty cycle T : periode Perhitungan: Jumlah lilitan
Dimana L : nilai induktansi
Imax : arus maksimal
Bmax :fluk density maksimum
Ac :luasan core (inti besi)
Perhitungan:
Perhitungan rangkaian snubber
Dimana Csnuber : capasitansi snuber t_fall : waktu untuk kembali
dari mosfert
V_off : tegangan saat off mosfet
D : duty cycle T : periode
2.3 Buck converter
Buck converter, pada proyek ini digunakan sebagai regulator ke beban 24 V yang terdiri dari beberapa komponen utama, yaitu mosfet sebagai switch, induktor, kapasitor, diode, dan beban. Gambar rangkaian buck converter terlihat seperti gambar 4.
Untuk mendisain konverter perlu ditetapkan
beberapa variable, yaitu:
Tegangan input : 50 V Tegangan output : 24 V Arus output : 2,5 A Frekuensi switching : 25 Khz Dari data yang ditetapkan diatas, dapat dihitung nilai-nilai komponen yang digunakan, yaitu:
Duty cycle
Dimana : D : duty cycle Vo : tegangan output Vin :tegangan input Perhitungan:
Nilai induktor
Dimana : L : induktansi induktor Vin : tegangan input Vo : tegangan output : ripple arus Perhitungan: Nilai capasitor
Dimana: C : kapasitansi kapasitor : ripple arus : ripple tegangan F : frekuensi switching Perhitungan Jumlah lilitan
Dimana L : induktansi inductor Imax : arus maksimal Ac :luasan core (inti besi)
Bmax :fluxdensity maksimal Perhitungan
Perhitungan rangkaian snubber
Dimana
Csnuber: capasitansi snuber t_fall : waktu untuk kembali dari
mosfert
V_off : tegangan saat off mosfet D : duty cycle
T : periode Perhitungan
2.4 Totempole
Rangkaian totempole digunakan sebagai kopling antara mikrokontroler dengan konverter DC-DC karena mikrokontroler
tidak mampu mengendalikan konverter secara langsung. Rangkaian totempole terdiri dari transistor NPN dan PNP. Gambar dari rangkaian totempole seperti pada gambar 5.
Gambar 5. Optocoupler dan totempole 2.5 Sensor tegangan
Sensor tegangan yang dipakai adalah pembagi tegangan dengan resistor dikarenakan tegangan output DC dan tegangan yang diukur maksimal 24 V, sedangkan tegangan yang diperbolehkan masuk ke ADC pada mikrokontroler maksimal 5 V. perhitungan sensor tegangan sebagai berikut
R1 ditentukan 3300 ohm, maka:
Gambar dari sensor tegangan seperti gambar 6 berikut.
Gambar 6. Sensor tegangan 2.6 Perencanaan kontrol PWM
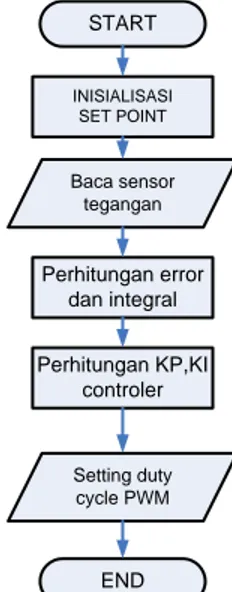
Pembangkit pulsa PWM didapatkan dari mikrokontroler PORTD.4 yang merupakan timer 1. Selanjutnya digunakan optocoupler sebagai pemisah dan masuk ke rangkaian totempole yang berfungsi sebagai penguat arus. Gambar 7 adalah flowchart main
program sistem yang digunakan untuk mengontrol PWM START Baca sensor tegangan INISIALISASI SET POINT Perhitungan error dan integral Perhitungan KP,KI controler Setting duty cycle PWM END
Gambar 7. Flowchart main program 2.7 Desain kontroler PI
Kontroler digunakan untuk mengontrol tegangan output buck converter agar konstan. Dalam membuat kontroler ini yang diperhatikan adalah mengenai set point dari output buck yang harus dipertahankan yang dilihat dari data ADC. Dari data ADC maka diperoleh error dari set point. Dari error tersebut akan dikalikan time sampling yang kemudian menghasilkan integral. Kemudian didapatkan nilai P dari konstanta proporsional dikalikan error. Sedangkan I diperoleh dari konstanta integral dikalikan integral. Nilai PI adalah penjumlahan dari nilai P dan I. Berikut adalah program lengkapnya:
sp=145;//nilai tegangan 24 volt kp=10; //konstanta P ki=0.005; // konstanta I integral=0; lasterror=0; timesampling=0.01; while (1) {
// Place your code here
pv=read_adc(0); //read present value error = sp - pv; // calculate error integral += error * timesampling; if(pv==0) integral=0;
// calculate PID controller P = kp * error; I = ki * integral; PI = P + I; if(PID>431)PID=431; if(PID<0)PID=0; pwm=PID; //send++; OCR1A = (int)pwm; delay_ms(10); };
3.PENGUJIAN DAN ANALISIS
3.1 Pengujian Rangkaian Totempole Dan Optocoupler
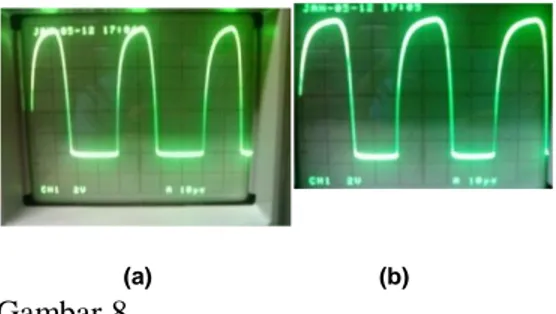
Rangkaian totempole dan optocoupler digunakan sebagai buffer sinyal input yang dihasilkan oleh mikrokontroler dan digunakan untuk mengendalikan konverter. Gambar 8 gelombang tegangan output rangkaian totempole.
(a) (b)
Gambar 8
a.bentuk gelombang dengan duty cycle 50% b.bentuk gelombang dengan duty cycle 60% 3.2 Pengujian sensor tegangan
Pengujian sensor tegangan digunakan untuk mengetahui respon sensor tersebut terhadap berbagai masukan tegangan. Pengujian dilakukan dengan memberikan tegangan input sebesar 10 V sampai 30 volt, kemudian diukur tegangan keluaran dari sensor tersebut. Hasil pengujian sensor tegangan dapat dilihat pada Tabel 1
Tabel 1. Pengujian sensor tegangan Vin Vout Vout
teori % Error 2 0,22 0,23 4,34 4 0,46 0,46 0 6 0,69 0,69 0 8 0,93 0,92 1,09 10 1,16 1,15 0,87 12 1,41 1,38 2,17 14 1,63 1,61 1,24 16 1,88 1,84 2,2 18 2,11 2,07 1,93 20 2,34 2,31 1,3 22 2,34 2,31 1,3 24 2,82 2,77 1,81 26 3,05 3 1,67 24 2,82 2,77 1,81 28 3,28 3,23 1,54 30 3,53 3,46 2,02 3.3 Pengujian rangkain rectifier
Rangkaian yang digunakan untuk rectifier menggunakan diode bride full wave rangkaian tersebut menggunakan 4 buah diode. Input tegangan adalah 24 volt yang berasal dari input 220 volt yang diturunkan menggunakan trafo step down menjadi 24 volt. Setelah disearahkan diode tersebut diberi filter capasitor dengan nilai kecil yaitu 47 nanoFarad. Hasil pengujian diperlihatkan pada tabel 2.
Tabel 2. Pengujian rectifier No Vin Vout Vout
teori % Error 1 5 3,31 4,51 26,61 2 10 7,83 9,1 13,95 3 15 12,18 13,51 9,84 4 20 17,11 18,01 5 5 25 21,1 22,52 6,3 6 30 25,5 27,02 5,62 3.4 Pengujian boost converter
Pengujian boost converter digunakan untuk mengetahui respon converter terhadap perubahan duty cycle inputnya. Hal ini
bertujuan untuk mengetahui perbedaan hasil output dengan perhitungan secara teoritis. Hasil pengujian diperlihatkan pada tabel 3.
Tabel 3. Pengujian boost converter Duty
cycle
Vin Iin Vout praktek Vout teori % Error 20 10 0,23 21 12,5 40,4 30 10 0,54 34 14,28 58 40 10 0,92 66 16,67 74,6 50 10 1,5 88 20 77,2 60 10 2 100 25 75 3.5 Pengujian Rangkaian Buck Konverter Pengujian buck converter digunakan untuk mengetahui respon konverter terhadap perubahan duty cycle inputnya. Hal ini bertujuan untuk mengetahui perbedaan hasil output dengan perhitungan secara teoritis. hasil pengujian diperlihatkan pada tabel 4.
Table 4. pengujian buck converter Duty
cycle
Vin Iout Vout praktek Vout teori % Error 20 30 0,37 4,2 6 30 40 30 0,54 9,5 12 20,83 50 30 0,64 13,5 15 10 60 30 0,7 16,3 18 9,44 70 30 0,76 20 21 4,76 3.6 Pengujian kontroler
Kontroler disini digunakan untuk menjaga tegangan output buck converter agar stabil. Kontroler dikatakan baik apabila bisa menjaga kestabilan tegangan output yang dikontrol. pengujian kontroler dilakukan dengan mengubah tegangan input dari buck converter dan membandingkan antara pengujian dengan set point dari kontroler. Hasil pengujian kontroler diperlihatkan pada tabel 5.
Tabel 5. pengujian kontroler dengan perubahan tegangan input
Vin (V) Vref (V) Vout
(V) % error 26 24 23,5 2,083 28 24 23,5 2,083 30 24 23,6 1,67 32 24 23,6 1,67 34 24 23,7 1,25 36 24 23,7 1,25
3.7 Pengujian power factor
Pada pengujian keselurahan sistem ini dibandingkan nilai power factor dengan menggunakan rangkaian rectifier gelombang penuh dengan sistem keseluruhan yaitu boost converter sebagai power factor correction (PFC) dan buck converter sebagai regulator. Hasil pengujian power factor diperlihatkan pada tabel 6 dan tabel 7
Table 6. Pengujian PF dengan rectifier
Vout (V) Iout (A) PF
23,8 0,6 0,84
23,8 1 0,84
24 1,5 0,84
23,87 2 0,85
Table 7. Pengujian PF dengan keseluruhan sistem
Vout (V) Iout (A) PF
23,8 0,5 0,80
23,5 1 0,92
23,4 1,5 0,93
22,7 2 0,93
21,8 2,5 0,94
Gambar 7. Bentuk gelombang arus input rectifier
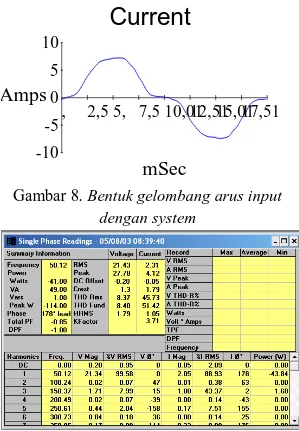
Current
mSec Amps 1Ø 0.0 2.5 5.0 -2.5 -5.0 . 2.494.997.489.9812.4714.9617.46Gambar 8. Bentuk gelombang arus input dengan system
Gambar 9.Hasil record data rangkaian rectifier
Gambar 10.Hasil record data dengan sistem
4. Kesimpulan
Setelah melalui beberapa proses perencanaan, pembuatan dan pengujian alat serta dari data yang didapat dari perencanaan dan pembuatan alat, maka dapat disimpulkan:
1. Pada sistem ini perbaikan factor daya menggunakan boost converter yang bekerja pada kondisi tidak kontinyu
dengan desain input tegangan 24 volt output 50 Volt dengan arus 3 A, sedangkan buck converter digunakan sebagai regulator dengan output 24 volt arus 2,5 ampere.
2. Efisiensi buck converter semakin besar saat duty semakin besar atau dapat dikatakan efisiensi buck converter semakin besar saat arus output besar. 3. Pada pengujian integrasi diperoleh
perbaikan power factor 0,94 dan harmonisa 23,83% sedangkan rangkaian rectifier memiliki power factor 0,84 dan harmonisa 45,73 %.
4. Saat pengujian integrasi sistem pada sisi output tidak mencapai 24 volt karena pada sisi input terjadi drop tegangan pada trafo yang menyebabkan sistem tidak dapat bekerja secara nominal.
5. Nilai power factor akan meningkat saat arus output besar atau dapat dikatakan nilai power factor meningkat saat arus output mencapai nilai nominal.
DAFTAR PUSTAKA
[1] Muhammad H Rasyid,”Rangkaian Elektronika Daya, Devices,dan Aplikasinya”, Jakarta,1999.
[2]D. Petruzella, Frank ,”Elektronik Industri”, Andi, Yogyakarta, 2001.
[3] Daniel W. Hart, “Introduction to Power Electronics,” Prentice-Hall International, International Edition, 1997.
[4] P.J. Randewijk, “Inductor Design,” 2006.
[5]Datasheet of ATmega16 8-bit Microcontroller with 16K Bytes InSystem Programmable
Flash
[6] Katsuhiko Ogata. Teknik Kontrol Automatik. Erlangga 1997
[7] Brian R Copeland. Design PID controller using Ziegler-nicols tuning. 2008 [8]http://www.alldatasheet.com/datasheetpdf / pdf/78532/ATMEL/ATMEGA16.pdf