BAB II
LANDASAN TEORI
2.1 Antena
Antena adalah perangkat media transmisi wireless (nirkabel) yang memanfaatkan udara atau ruang bebas sebagai media penghantar. Antena mempunyai fungsi untuk merubah energi elektromagnetik terbimbing menjadi gelombang elektromagnetik ruang bebas (gelombang mikro) yang merupakan fungsi antena sebagai transmitter(Tx). Energi listrik dari transmitter dikonversi menjadi gelombang elektromagnetik dan oleh sebuah antena yang kemudian gelombang tersebut dipancarkan menuju udara bebas. Pada receiver(Rx) akhir gelombang elektromagnetik dikonversi menjadi energi listrik dengan menggunakan antena. Gambar 2.1 menunjukkan antena sebagai pengirim dan penerima[2].
Gambar 2.1 Antena sebagai pengirim dan penerima
2.1.1 Parameter Karakteristik Antena
Parameter karakteristik antena digunakan untuk menguji atau mengukur performa antena yang akan digunakan. Berikut penjelasan beberapa parameter antena yang sering digunakan yaitu direktivitas antena, gain antena, pola radiasi antena, beamwidth antena, bandwidth antena dan voltage standing wave ratio
2.1.1.1 Direktivitas
Keterarahan dari suatu antena didefinisikan sebagai ’’perbandingan antara intensitas radiasi maksimum dengan intensitas radiasi dari antena referensi isotropis”. Keterarahan dari sumber non-isotropis adalah sama dengan perbandingan intensitas radiasi maksimumnya di atas sebuah sumber isotropis[4]. Keterarahan pada antena secara umum dinyatakan dari Persamaan 2.1[4]:
𝐷𝑜 = 10. 𝑙𝑜𝑔4.𝜋.𝑈𝑚𝑎𝑥
𝑃𝑟𝑎𝑑 (2.1)
Dimana :
𝐷𝑜 = directivity (dB)
𝑈𝑚𝑎𝑥 = intensitas radiasi maksimum (watt) 𝑃𝑟𝑎𝑑 = daya radiasi total (watt)
2.1.1.2 Gain
Gain (directive gain) adalah karakter antena yang terkait dengan kemampuan antena mengarahkan radiasi sinyalnya atau penerimaan sinyal dari arah tertentu. Gain bukanlah kuantitas yang dapat diukur dalam satuan fisis pada umumnya seperti watt, ohm, atau lainnya, melainkan suatu bentuk perbandingan. Oleh karena itu, satuan yang digunakan untuk gain adalah decibel [7].
Gain dari sebuah antena adalah kualitas nyala yang besarnya lebih kecil daripada penguatan antena tersebut yang dapat dinyatakan pada Persamaan 2.2[5]
Gain = G = k.D (2.2)
Dimana :
Gain dapat dihitung dengan membandingkan kerapatan daya maksimum antena yang diukur dengan antena referensi yang diketahui gainnya. Maka dapat dituliskan pada Persamaan 2.3 [4]:
𝐺 =𝑃𝑚𝑎𝑥(𝑎𝑛𝑡𝑒𝑛𝑎 𝑦𝑎𝑛𝑔 𝑑𝑖𝑢𝑘𝑢𝑟)
𝑃𝑚𝑎𝑥(𝑎𝑛𝑡𝑒𝑛𝑎 𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑠𝑖) 𝑥 𝐺 (𝑎𝑛𝑡𝑒𝑛𝑎 𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑠𝑖) (2.3)
Atau jika dihitung dalam nilai logaritmik dirumuskan oleh Persamaan 2.4 [4]:
𝐺𝑡(𝑑𝐵) = [𝑃𝑡(𝑑𝐵𝑚) − 𝑃𝑠(𝑑𝐵𝑚)] + 𝐺𝑠(𝑑𝐵) (2.4) Dimana :
𝐺𝑡 = Gain total antena
𝑃𝑡 = Nilai level sinyal maksimum yang diterima antena terukur (dBm) 𝑃𝑠 = Nilai level sinyal maksimum yang diterima antena referensi (dBm) 𝐺𝑠 = Gain antena referensi
2.1.1.3 Pola Radiasi
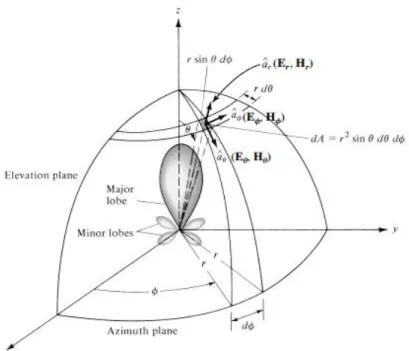
Pola radiasi dari sebuah antena didefinisikan sebagai fungsi matematis atau gambaran secara grafis dari karakteristik radiasi sebuah antena sebagai fungsi dari koordinat ruang. Pada kasus secara keseluruhan, pola radiasi dihitung/diukur pada medan jauh dan digambarkan kembali sebagai koordinat arah. Karakteristik radiasi mencakup rapat flux daya, intensitas radiasi, kuat medan, keterarahan/direktivitas, fasa atau polarisasi. Karakteristik radiasi yang menjadi pusat perhatian adalah distribusi energi radiasi dalam ruang 2 dimensi maupun 3 dimensi sebagai fungsi dari posisi pengamat di sepanjang jalur dengan jari-jari yang konstan. Contoh koordinat yang sesuai diperlihatkan pada Gambar 2.2[4]. Radiasi antena terdiri dari tiga komponen medan elektromagnetik (medan listrik dan medan magnet) yaitu 𝐸 ,
𝐸Ø, 𝐸ɵ dan 𝐻𝑟, 𝐻Ø, 𝐻ɵ dimana r adalah radius radiasi, Ø adalah lebar sudut radiasi terhadap azimuth, dan ɵ adalah lebar sudut radiasi terhadap elevasi.
Gambar 2.2 Sistem koordinat untuk menganalisis antena
2.1.1.4 Beamwidth
Beamwidth adalah besamya sudut berkas pancaran gelombang frekuensi radio utama (main lobe) yang dihitung pada titik 3 dB menurun dari puncak lobe utama [2]. Besarnya beamwidth dapat dihitung dengan persamaan 2.5[6] :
𝐵𝑤 =21,1 𝑓.𝐷 𝑑𝑒𝑟𝑎𝑗𝑎𝑡 (2.5) Dimana : Bw = 3 dB beamwidth (derajat) f = frekuensi (GHz) D = diameter antena (m)
Gambar 2.3 menunjukkan tiga daerah pancaran yaitu lobe utama (main lobe, nomor 1), lobe sisi samping (side lobe, nomor 2) dan lobe sisi belakang (back lobe, nomor 3).
Gambar 2.3 Beamwidth antena
Half Power Beamwidth (HPBW) adalah daerah sudut yang dibatasi oleh titik-titik setengah daya atau -3 dB atau 0.707 dari medan maksimum pada lobe utama. First Null Beamwidth (FNBW) adalah besar sudut bidang diantara dua arah pada main lobe yang intensitas radiasinya nol.
2.1.1.5 Bandwidth
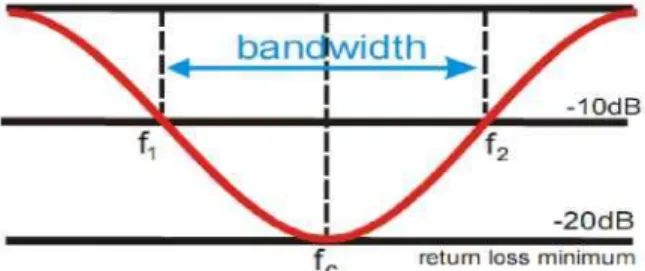
Bandwidth suatu antena didefinisikan sebagai rentang frekuensi dimana kerja yang berhubungan dengan berapa karakteristik (seperti impedansi masukan, pola, beamwidth, polarisasi, gain, efisiensi, VSWR, return loss, axial ratio) memenuhi spesifikasi standar [4]. Gambar 2.4 menunjukkan bandwidth antena.
Dari Gambar 2.4 diketahui f1 adalah frekuensi bawah, f2 adalah frekuensi atas dan fc merupakan frekuensi tengah. Dengan melihat Gambar 2.4 bandwidth dapat dicari dengan menggunakan Persamaan 2.6 [5] :
𝐵𝑊% =𝑓2−𝑓1
𝑓𝑐 𝑥 100% (2.6)
Bandwidth yang dinyatakan dalam persen seperti ini biasanya digunakan untuk menyatakan bandwidth antena yang memiliki band sempit (narrow band). Sedangkan untuk band yang lebar (broad band) biasanya digunakan definisi rasio antara batas frekuensi atas dengan frekuensi bawah.
2.1.1.6 Voltage Standing Wave Ratio (VSWR)
VSWR adalah perbandingan antara amplitudo gelombang berdiri (standing wave) maksimum (|V|max) dengan minimum (|V|min). Pada saluran transmisi ada dua komponen gelombang tegangan, yaitu tegangan yang dikirimkan (𝑉𝑂+) dan tegangan yang direfleksikan (𝑉𝑂−). Pebandingan tegangan yang direfleksikan dengan yang dikirimkan disebut sebagai koefisien refleksi tegangan (Γ) yang dapat dicari dengan Persamaan 2.7 [8] :
Γ =𝑉𝑜− 𝑉𝑜+ =
𝑍𝐿−𝑍𝑜
𝑍𝐿+𝑍𝑜 (2.7)
di mana 𝑍𝐿 adalah impedansi beban (load) dan 𝑍𝑜 adalah impedansi saluran. Rumus untuk mencari VSWR dituliskan pada Persamaan 2.8 [4] :
𝑉𝑆𝑊𝑅 = |𝑉|𝑚𝑎𝑥 |𝑉|𝑚𝑖𝑛 =
1+|Γ|
1−|Γ| (2.8) Kondisi yang baik adalah ketika VSWR bemilai 1, yang berarti tidak ada refleksi ketika saluran dalam keadaan matching sempurna. Namun, kondisi ini
kenyataannya sulit diperoleh. Oleh karena itu, nilai standar VSWR yang diijinkan dalam perancangan antena adalah < 2.
2.1.2 Antena Omnidireksional
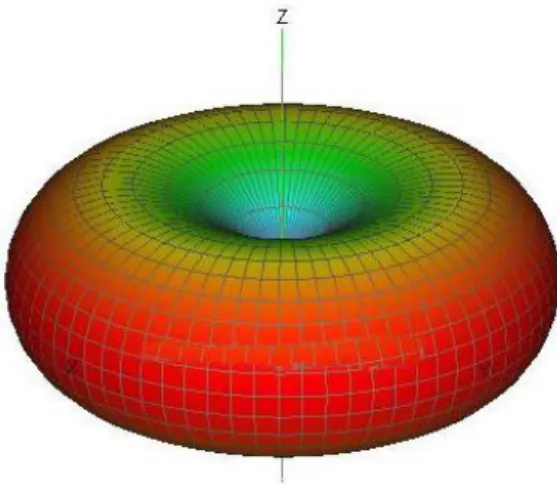
Antena omnidireksional adalah sebuah perangkat antena yang mampu mengirim dan menerima sinyal ke dan dari segala arah. Antena jenis ini memiliki sudut pancaran (beamwidth) yang besar, namun memiliki jarak jangkauan yang kecil. Antena omnidireksional biasanya digunakan untuk keperluan hotspot atau access point karena cocok untuk hubungan komunikasi point-to-multi-point. Pola radiasi dari antena omnidireksional berbentuk seperti donat, seperti yang ditunjukkan oleh Gambar 2.5. Contoh dari antena omnidireksional yaitu antena ¼ lamda, antena monopole, antena rubber duck, dan lain-lain.
Gambar 2.5 Pola radiasi antena omnidireksional
2.1.3 Antena Unidireksional
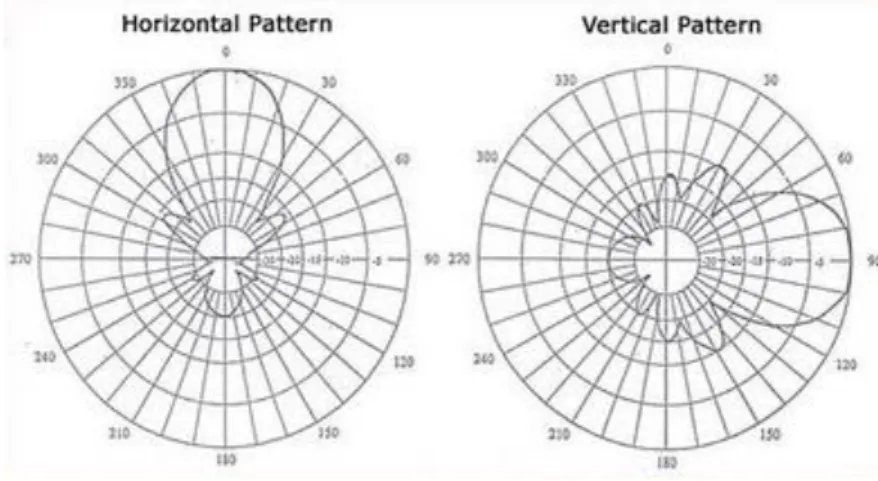
Antena unidireksional memancarkan dan menerima sinyal hanya dari satu arah. Antena unidireksional mempunyai kemampuan direktivitas yang lebih dibandingkan jenis-jenis antena lainnya. Kemampuan direktivitas ini membuat
antena ini lebih banyak digunakan untuk koneksi jarak jauh. Dengan kemampuan direktivitas ini membuat antena mampu mendengar sinyal yang relatif kecil dan mengirimkan sinyal lebih jauh. Umumnya antena unidireksional mempunyai spesifikasi gain tinggi tetapi beamwidth kecil. Hal ini menguntungkan karena kecilnya beamwidth menyebabkan berkurangnya derau yang masuk kedalam antena. Semakin kecil bidang tangkapan(aperture), semakin naik selektivitas antena terhadap sinyal wireless yang berarti semakin sedikit derau yang ditangkap oleh antena tersebut[7].
Beberapa macam antena unidireksional antara lain antena Yagi-Uda, antena parabola, antena helix, antena biquad, antena log-periodik, dan lain-lain. Gambar 2.6 menunjukkan pola radiasi dari antena unidireksional.
Gambar 2.6 Pola radiasi antena unidireksional
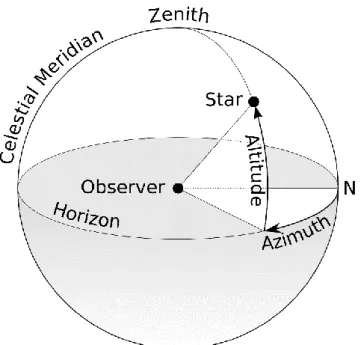
2.2 Azimuth dan Elevasi
Azimuth ialah sudut dalam derajat yang diukur sepanjang garis horizon, diantara utara yang sesungguhnya dan titik posisi satelit yang ditranslasikan ke garis horizon. Azimuth selalu direpresentasikan searah jarum jam dari utara sebenarnya, dan selalu menunjukan nilai positif.
Elevasi (altitude) ialah sudut yang diukur sepanjang garis vertikal, antara horizon dengan target. Secara teori, elevasi dapat bernilai positif dan negatif, namun pada prakteknya nilai negatif tidak mungkin ditemui, karena hal itu berarti target berada di bawah garis horizon (di bawah permukaan bumi). Gambar 2.7 menunjukkan posisi dari sudut azimuth dan elevasi.
Gambar 2.7 Posisi sudut azimuth dan elevasi
Karena sudut azimuth dan elevasi terbentuk dari posisi stasiun pengirim dan stasiun penerima, maka dapat digunakan persamaan segitiga pythagoras untuk menentukan besar sudut azimuth maupun sudut elevasi.
Gambar 2.8 Merupakan segitiga siku-siku. Jika kita ingin mencari besar sudut di titik A, maka dapat dinyatakan pada Persamaan 2.9 [14] :
𝐴 = 𝐴𝑟𝑐 tan (𝑎 𝑐⁄ ) (2.9)
2.2.1 GPS (Global Positioning System)
GPS adalah sistem satelit navigasi dan penentuan posisi global yang dimungkinkan dengan beroperasinya satelit penentu posisi milik negara Amerika Serikat. Asalnya adalah NAVSTAR GPS (Navigation Satelite Timing and Ranging Global Positioning System), yang kemudian disingkat GPS merupakan sistem radio navigasi satelit yang dikembangkan oleh United State Departement of Defense (DoD) untuk keperluan militer dalam penentuan posisi, kecepatan dan waktu secara teliti dalam segala cuaca pada sembarang waktu dimuka bumi (darat, laut dan udara). Selanjutnya dengan persetujuan US Congress, GPS kemudian dikembangkan untuk keperluan non–militer. Secara Teknis GPS adalah perpaduan satelit dan receiver yang mampu menunjukkan dan mencatat posisi suatu obyek dimuka bumi secara global.
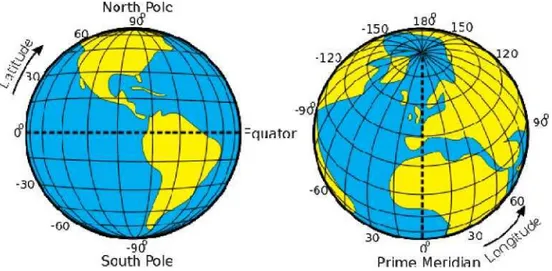
Koordinat Geografi diukur dalam lintang dan bujur dalam besaran derajat desimal, derajat menit desimal, atau derajat menit detik. Lintang diukur terhadap ekuator sebagai titik NOL (0° sampai 90° positif kearah utara dan 0° sampai 90° kearah selatan). Bujur diukur berdasarkan titik NOL di greenwich (0° sampai 180° kearah timur dan 0° sampai 180° kearah barat)[9]. Gambar 2.9 merupakan tampak globe yang menunjukan letak lintang dan bujur pada bumi[8].
Gambar 2.9 Sistem kordinat latitude dan longitude
Dari berbagai format penulisan koordinat, ada tiga macam format koordinat yang dipakai pada GPS sebagai titik penentu lokasi suatu area, yakni[9]:
1. Koordinat yang mengandung derajat (degree), menit (minutes), dan detik (seconds), disebut juga DMS.
Format: derajat menit detik koma detik (dd mm ss.ss) Contoh: 40:26:46.302N 79:56:55.903W
Arti: Pada Lintang Utara (Latitude North) 40 derajat 26 menit 46,302 detik, Pada Bujur Barat (Longitude West) 79 derajat 56 menit 55,903 detik.
2. Koordinat yang mengandung derajat (degree) dan menit (minutes), disebut juga MinDec.
Format: derajat menit koma menit (dd mm.mmmm) Contoh: 76° 77.4564, -54° 34.5657
Arti : Pada Lintang Utara 76 derajat 77,4564 menit, Pada Bujur Barat 54 derajat 34,5657 menit.
3. Koordinat yang mengandung derajat saja (DegDec) Format: derajat koma derajat (dd.dddddd)
Arti: Pada Lintang Selatan 6, 257508 derajat, Pada Bujur Timur 106,745980 derajat.
2.2.2 Teorema Euclidean Distance
Euclidean distance adalah perhitungan jarak dari 2 buah titik dalam Euclidean space. Euclidean space diperkenalkan oleh Euclid, seorang matematikawan dari Yunani sekitar tahun 300 B.C.E. untuk mempelajari hubungan antara sudut dan jarak. Euclidean ini berkaitan dengan Teorema Phytagoras dan biasanya diterapkan pada 1, 2 dan 3 dimensi. Gambar 2.10 menunjukkan jarak antara dua titik koordinat. Untuk mencari jarak antara dua titik dinyatakan pada Persamaan 2.10 [14]:
𝑑 = √(𝑥1 − 𝑥2)2 + (𝑦1 − 𝑦2)2 (2.10) Dimana :
d = jarak antara kedua titik x1 = posisi titik A pada sumbu x x2 = posisi titik B pada sumbu x y1 = posisi titik A pada sumbu y y2 = posisi titik B pada sumbu y
Teori ini dapat digunakan untuk mencari jarak antara dua buah koordinat latitude dan longitude yang dapat dilihat pada Persamaan 2.11 [14]:
𝑗𝑎𝑟𝑎𝑘 = √(𝐿𝑎𝑡1 − 𝐿𝑎𝑡2)2+ (𝐿𝑜𝑛𝑔1 − 𝐿𝑜𝑛𝑔2)2 (2.11) Hasil perhitungan dari persamaan jarak diatas masih dalam satuan decimal degree (sesuai dengan format latitude dan longitude yang digunakan) sehingga untuk menyesuaikannya perlu dikalikan dengan 111,319 km (1 derajat bumi = 111,319 km) agar satuannya berubah menjadi km.
2.3 Dasar Teori Sistem Kontrol
Sistem kendali dapat didefinisikan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan tanggapan sistem yang diharapkan. Jadi harus ada yang dikendalikan, yang merupakan suatu sistem fisis, yang biasa disebut dengan kendalian (plant).
Masukan dan keluaran merupakan variabel atau besaran fisis. Keluaran merupakan hal yang dihasilkan oleh kendalian, artinya yang dikendalikan; sedangkan masukan adalah yang mempengaruhi kendalian, yang mengatur keluaran.
A. Sistem kendali lup terbuka
Sistem kendali lup terbuka merupakan sebuah sistem dimana tidak terdapat elemen yang mengamati keluaran yang terjadi untuk dibandingkan dengan masukannya (yang diinginkan), meskipun menggunakan sebuah pengendali (controller) untuk memperoleh tanggapan yang diinginkan[10]. Gambar 2.11 menunjukkan bentuk diagram blok sistem kendali open loop.
Gambar 2.11 Blok diagram sistem kendali open loop
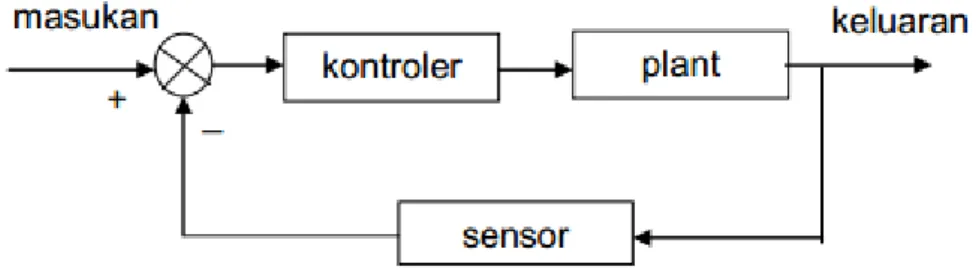
B. Sistem kendali lup tertutup
Sistem kendali lup tertutup adalah sistem kendali yang mempunyai umpan balik, yang berfungsi untuk mengamati keluaran yang terjadi untuk dibandingkan dengan masukannya (yang diinginkan). Gambar 2.12 menunjukkan bentuk diagram blok sistem kendali close loop.
Gambar 2.12 Blok diagram sistem kendali close loop
2.4 Arduino
Arduino didefinisikan sebagai sebuah platform elektronik yang open source, berbasis pada sofwtare dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk para seniman, desainer, hobbies, dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif[11].
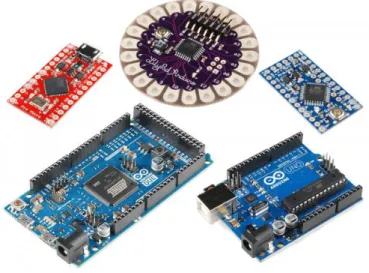
Nama Arduino di sini tidak hanya dipakai untuk menamai papan rangkaiannya saja, tetapi juga untuk menamai bahasa dan software pemrogramannya, serta lingkungan pemrogramannya atau IDE-nya (IDE =
Integrated Development Environment). Gambar 2.13 menujukkan tampilan dari beberapa Arduino.
Gambar 2.13 Jenis-jenis Arduino
Kelebihan Arduino dari platform hardware mikrokontroler lainnya adalah: 1. IDE Arduino merupakan multiplatform, yang dapat dijalankan di
berbagai sistem operasi, seperti Windows, Macintosh, dan Linux. 2. IDE Arduino dibuat berdasarkan pada IDE Processing, yang sederhana
sehingga mudah digunakan.
3. Pemrograman Arduino menggunakan kabel yang terhubung dengan port USB, bukan port serial. Fitur ini berguna karena banyak komputer yang sekarang ini tidak memiliki port serial.
4. Arduino adalah hardware dan software open source. 5. Biaya hardware cukup murah.
6. Proyek Arduino ini dikembangkan dalam lingkungan pendidikan, sehingga bagi pemula akan lebih cepat dan mudah mempelajarinya. 7. Memiliki begitu banyak pengguna dan komunitas di internet yang dapat
Arduino menggunakan software processing yang digunakan untuk menulis program kedalam arduino. Processing arduino merupakan penggabungan antara bahasa C++ dan Java. Gambar 2.14 menunjukkan tampilan utama software Arduino IDE. Software Arduino IDE ini dapat di-install di berbagai Operating System (OS) seperti : LINUX, Mac OS, Windows. Software Arduino IDE terdiri dari 3 bagian :
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing.
2. Compiler, modul yang berfungsi mengubah bahasa processing (kode program) ke dalam kode biner karena kode biner adalah satu-satunya bahasa program yang dipahami oleh mikrokontroller.
3. Uploader, modul yang berfungsi memasukkan kode biner kedalam mikorokontroler. Struktur perintah pada arduino secara garis besar terdiri dari dua bagian yaitu void setup dan void loop. Void setup berisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkan sedangkan void loop berisi perintah yang akan dieksekusi berulang ulang selama arduino dinyalakan.
2.5 Tracking Antena
Pergerakan muatan dapat menimbulkan masalah pada sisi stasiun bumi. Hal ini terjadi karena untuk dapat menerima data dengan baik, stasiun bumi harus terarah ke muatan. Oleh karena itu, antena stasiun bumi harus memiliki mount yang dapat digerakkan dan sistem tracking. Mount antena yang biasa digunakan adalah EL/AZ mount yang memungkinkan antena untuk digerakkan ke arah atas- bawah dan kiri-kanan. Sistem tracking diperlukan pada situasi dimana sebuah jaringan komunikasi mengharuskan level sinyal yang diterima dan yang dikirimkan berada didalam batas tertentu. Sistem tracking akan mencari arah sinyal terkuat yang dikirimkan oleh muatan sehingga memungkinkan antena stasiun bumi untuk pointing ke muatan [12].
Secara umum, sistem tracking terbagi menjadi 3, yaitu manual tracking, program tracking dan autotracking. Sistem manual tracking adalah sistem yang membutuhkan seorang operator untuk menggerakkan antena sampai didapat sinyal yang maksimal. Program tracking adalah sistem dimana antena digerakkan berdasarkan data-data prediksi lintasan muatan. Data ini bisa berupa data hasil perhitungan komputer maupun data rekaman lintasan muatan dari waktu-waktu sebelumnya. Sistem autoracking antena adalah suatu sistem yang memungkinkan antena stasiun bumi untuk mendeteksi dan bergerak ke arah sinyal terkuat secara otomatis dengan menggunakan sistem kontrol dan motor penggerak. Apabila sinyal yang diterima stasiun bumi menurun, maka sistem kontrol akan mendeteksi lokasi sinyal terkuat dan memberikan perintah agar motor penggerak mengerakkan antena ke arah tersebut [13].