6 BAB II
TINJAUAN PUSTAKA
2.1. State Of The Art
Penelitian dan pengembangan verifikasi terhadap ciri yang dimiliki manusia khususnya pada bentuk geometri tangan telah banyak dilakukan. Penelitian tentang bentuk geometri tangan dengan metode chain code pernah dilakukan oleh Santosa, Ari Made pada Tahun 2010 dengan judul penelitian “Verifikasi Geometri Tangan Menggunakan Metode Chain Code dengan Metrika Dynamic Time Warping”. Hasil penelitian Santosa, Ari Made menunjukkan bahwa metode chain code dapat menghemat ruang penyimpanan. Pengujian dalam penelitian tersebut menunjukkan bahwa akurasi tertinggi sistem mencapai 84,67% dengan catatan bahwa akurasi sistem tersebut menurun seiring dengan bertambahnya banyak pengguna sistem tersebut.
Penelitian dengan metode Dominant Point pernah dilakukan oleh Ida Bagus Yogi Pratama pada tahun 2013 dengan judul “sistem verifikasi tanda tangan online dengan metode dominant points dan location of dominant points” hasil dari penelitian ini yaitu mampu mengenali dan membedakan tanda tangan yang dimiliki oleh orang yang berbeda melalui arah gerak dari tanda tangan tersebut. Pengujian ini menghasilkan akurasi sistem tanpa adanya simple dan trained imposters sebesar 99,65% pada threshold (T) 65,1 dengan spesifikasi rejection error (FNMR) sebesar 0% dan acceptance error sebesar 0,35%.
Penelitian yang menggunakan metode time series pernah dilakukan oleh Christian Gruber, Michael Coduro dan Bernhard Sick dengan judul “Signature Verification with Dynamic RBF Network and Time Series Motif”. Penelitian ini menyajikan algoritma klasifikasi baru untuk time series. Langkah pertama disebut dengan motif waktu seri yang mewakili karakteristik subsquences dari seri waktu yang diekstrak menggunakan point ekstrim. Langkah kedua motif diekstrasi digunakan untuk melatih fungsi jaringan (DRBF) dibandingkan ke jaringan basis radial standar. Tingkat kesalahan sistem sekitar 1,5%.
7 Penelitian lain juga pernah dilakukan oleh Musa Mailah dan Lim Boon Han pada Tahun 2008 dengan judul “Biometric Signature Verification Using Pen Position, Time, Velocity and Pressure Parameters”. Sistem ini menghasilkan penolakan palsu sebesar 1,3% dan penerimaan palsu 0% dengan acuan menggunakan tanda tangan palsu yang telah ditiru.
Pengembangan yang dilakukan pada penelitian ini yaitu verifikasi dari bentuk geometi tangan dengan menggunakan metode multi matcher yaitu perpaduan antara metode arah chain code dan lokasi dari dominant points.
2.2. Tangan
Tangan adalah bagian tubuh di ujung suatu lengan. Sebagian besar manusia memiliki dua tangan, biasanya dengan empat jari dan satu ibu jari. Bagian dalam tangan adalah telapak tangan. Jika jari-jari ditekuk erat, tangan akan membentuk suatu kepalan. Selain manusia, banyak jenis hewan lain yang memiliki tangan, terutama dari kelompok primata. Ibu jari disebut juga jari jempol. Selain itu keempat jari yakni jari telunjuk, jari tengah, jari manis dan jari kelingking.
2.3. Chirognomy
Chirognomy adalah studi tentang bentuk, ukuran dan penampilan tangan, termasuk analisis tekstur, warna dan kelenturan kulit. Tempat yang baik untuk memulai studi Chirognomy adalah dengan mengenal bentuk tangan dasar. Penilaian bentuk tangan memberikan wawasan tentang karakter penting dari individu.
Sepanjang sejarah palmists telah mengembangkan berbagai sistem kategorisasi untuk jenis tangan. Salah satu sistem yang populer mengklasifikasikan tangan menjadi 7 jenis: Elemental,Square, Spatulate, filsafat, Conic, psikis dan Campuran. Dalam palmistri tradisional Cina ada jenis tangan 5 yang sesuai dengan 5 unsur Air, Api, Bumi Kayu, dan Metal. Jenis paling sederhana klasifikasi, dan salah satu yang saya mendukung, mencerminkan 4 kategori unsur yang digunakan dalam astrologi barat: Bumi, Air, Api dan Air.
8 Jenis unsur didefinisikan oleh bentuk telapak tangan dalam hubungannya dengan panjang jari-jari. Apakah telapak persegi atau lonjong? Apakah jari-jari pendek atau panjang?
2.4. Pola dan Pengenalan Pola
Pola dalam hal ini merujuk pada pengertian suatu komposisi stimulus penginderaan yang kompleks yang dapat dikenali oleh manusia sebagai pengamat sebagai suatu kelompok objek. Rekognisi pola merupakan proses pengenalan kembali terhadap pola yang pernah dikenal.
Bila dilihat dari jenis prosesnya, pemrosesan informasi memiliki dua jenis pemrosesan, yaitu data driven dan conceptually driven. Pemrosesan data driven dimulai dengan datangnya data penginderaan. Sedangkan dalam conceptually driven pemrosesan informasi dimulai dengan pembentukan konsep atau harapan individu tentang informasi yang mungkin dijumpainya.
Rekognisi pola melibatkan baik pemrosesan data dengan data driven (informasi diterima oleh indera) maupun conceptually driven (pengetahuan yang disimpan di memori). Rekognisi pola (pattern recognition) merupakan proses yang menjembatani antara proses deteksi sinyal penginderaan yang sederhana (yang cenderung data driven ) dengan persepsi terhadap pola-pola yang kompleks (yang cenderung conceptually driven).
2.5. Preprocessing
Berbagai teknik pengolahan citra digital dapat digunakan untuk mempersiapkan citra agar dapat menghasilkan ciri yang lebih baik pada tahap pemisahan ciri. Beberapa teknik yang bisa digunakan pada tahap prapengolahan citra (preprocessing) diantaranya Grayscale, normalisasi intensitas.
2.5.1 Keabuan (Grayscale)
Tujuan teknik grayscale adalah untuk mendapatkan citra keabuan. Citra keabuan dapat diperoleh dengan menggunakan rumus:
9 Dengan I(x,y) adalah level keabuan pada suatu koordinat yang diperoleh dengan mengatur komposisi warna R (merah), G (hijau), B (biru) yang ditunjukan oleh parameter α, β, dan γ. Secara umum nilai α, β, dan γ adalah 0,33. Nilai yang lain juga dapat diberikan untuk ketiga parameter tersebut asalkan total keseluruhan nilainya adalah 1.
2.5.2 Pengambangan (Thresholding)
Proses thresholding adalah proses pengolahan citra asli menjadi citra biner. Hasil akhir dari thresholding ini adalah citra dengan warna hitam dan putih. Proses thresholding dilakukan dengan menjumlahkan nilai RGB dari setiap pixel. Jika nilai penjumlahan lebih kecil dari 3 kali level thresholding yang ditentukkan, maka warna pixel tersebut diubah menjadi hitam (bernilai 0). Sebaliknya jika nilai penjumlahan RGB lebih besar, maka warna pixel dirubah ke warna putih (bernilai 1).
Berikut adalah contoh gambar sebelum dan sesudah di thresholding.
(a) (b)
Gambar 2.1 Citra thresholding dengan level 128 (a) citra asli (b) Citra hasil
threshholding
2.6. Sistem Biometrik
Sebuah sistem biometrik pada hakikatnya merupakan sebuah sistem pengenalan pola yang melakukan identifikasi personal dengan melakukankeotentikan dari karekteristik fisiologis (retina, iris, sidik jari, struktur wajah, pola mata, geometri telapak tangan) dan perilaku tertentu yang dimiliki seseorang. Secara logika sistem ini dibagi menjadi dua modul: modul pendaftaran dan modul identifikasi. Modul pendaftaran yang berfungsi untuk mengambil data-data dari individu dan menyimpannya kedalam sistem. Untuk dapat digunakan
10 dalam proses pencocokan, representasi digital tersebut diproses lebih lanjut untuk mendapatkan representasi yang cukup untuk mewakili yang disebut dengan template. Template ini kemudian dapat disimpan kedalam database didalam sistem biometrik atau pada kartu magnetik (smart card). Modul identifikasi berfungsi untuk mengidentifikasi individu pada titik akses. Pada saat pengoperasian, pemindahan biometrik menangkap karekteristik yang akan di identifikasi dan di ubah menjadi format digital, kemudian oleh extraction feature diproses menjadi representasi yang sama dengan template-nya dan kemudian dicocokan untuk mendapatkan identitas.
Karekteristik fisiologis manusia dapat dipakai sebagai identitas atau identitas personal, dalam karekteristik fisiologis manusia untuk biometrik harus memenuhi bebarapa kriteria yaitu: unik, permanen, dan dapat diambil atau diukur secara kuantitatif dan nilai dari pengukuran tersebut dapat digunakan untuk kepentingan identifikasi.
Beberapa karekteristik fisilogis untuk identifikasi personal antara lain yang sudah sering dipakai maupun dalam penyelidikan atau pengembangan lebih lanjut antara lain adalah: wajah, pola retina, hand geometri, iris mata, pola suara, tandatangan dan sidik jari.
2.6.1 Wajah
Wajah dapat diidentifikasi secara otomatis dengan suatu sistem yang kompleks karena tampilan struktur wajah dapat berubah-ubah. Tampilan struktur wajah dapat dilihat dari ekspersi wajah, gaya dan warna rambut, bulu-bulu diwajah telinga, posisi kepala, dan lain-lain yang dapat menghasilkan citra yang berbeda dengan citra yang diambil sebelumnya. Bentuk wajah dapat dilihat pada gambar 2.2
11 2.6.2 Pola Retina
Pola retina dapat dijadikan sebagai sistem biometrik. Struktur yang terdapat pada pola retina terdapat pada pola pembuluh darah pada retina yang akan dipantulkan kembali pada sebuah kamera yang akan merekam pola tersebut yang dideteksi oleh intra red. Pada pola retina dapat dilihat pada gambar 2.3
Gambar 2.3 Pola Retina
2.6.3 Geometri Sruktur Tangan
Hand geometry adalah struktur geometri tangan seseorang. Struktur ini termasuk lebar tangan orang, lebar telapak tangan, tebal tipisnya telapak tangan, panjang jari tangan dan lain-lain. Geometri struktur tangan dapat dijadikan sebagai sistem biometrik karena tangan bersifat unik. Bentuk scane hand geometry dapat dilihat pada gambar 2.4
Gambar 2.4 Hand Geometry
2.6.4 Iris Mata
Iris (selaput mata) pada mata dapat dijadikan sebagai sistem biometrik. Struktur yang terdapat pada iris mata ternyata unik untuk setiap manusia, sedangkan pola iris mata sebelah kiri dan kanan berbeda yang letaknya terlindung dibelakang selaput mata (kornea) yang membuat iris mata terlindung dari kerusakan. Maka iris mata dapat dilihat pada gambar 2.5
12 2.6.5 Pola Suara
Salah satu hal yang pendekatan biometrik sudah banyak dipakai dengan pengenalan suara atau ucapan. Suara dapat di identifikasikan melalui jarak jauh dengan sistem vocal. Sistem vocal adalah suatu sistem yang digunakan dalam menganalisa suara dengan teknologi speech processing. Bentuk pola suara dapat dilihat pada gambar 2.6
Gambar 2.6 Pola Suara
2.6.6 Verifikasi Tandatangan
Suatu hal yang mendasari tanda tangan adalah antara bagian yang konstan dengan kebiasaan karena bagian yang berubah-ubah pada tiap kali mentanda tangani. Proses yang mengacu pada aspek dari proses dinamis pembuatan tandatangan, seperti tekanan dan kecepatan tandatangan. Bentuk tandatangan dapat dilihat pada gambar 2.7
Gambar 2.7 Verifikasi Tandatangan
2.6.7 Sidik Jari
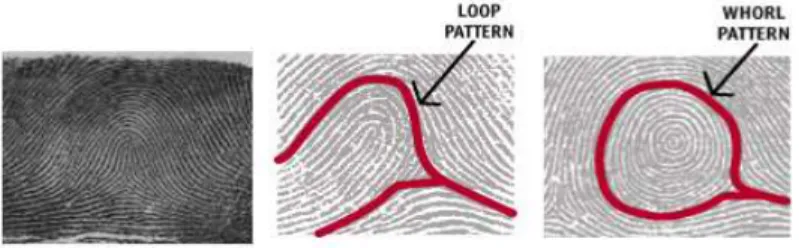
Sidik jari dapat dijadikan sebagai sistem biometrik dimana sidik jari bersifat unik. Berdasarkan klasifikasi pola sidik jari dapat dinyatakan secara umum kedalam tiga kategori yaitu: arch, loop, dan whorl. Pada pola sidik jari dapat dilihat pada gambar 2.8
Arch Loop Whorl
13
2.6.8 Telapak tangan (Palmprint)
Telapak tangan dari tangan manusia berisi banyak pola bukit dan lembah seperti sidik jari. Area telapak tangan adalah jauh lebih besar dari area suatu jari dan sebagai hasilnya, telapak tangan diharapkan menjadi lebih membedakan lagi dibanding sidik jari. Karena alat pemindai telapak tangan harus menangkap suatu area besar, mereka lebih besar dan lebih mahal dibanding sensor sidik jari. Telapak tangan manusia juga berisi fitur tambahan seperti garis utama dan kerutan yang dapat ditangkap oleh suatu alat pemindai dengan resolusi yang lebih rendah, yang mana akan bersifat lebih murah. Akhirnya, ketika menggunakan suatu scanner telapak tangan dengan resolusi tinggi, semua fitur seperti geometri tangan, fitur bukit dan lembah (misalnya, rincian yang tidak penting dan bentuk tunggal seperti delta), bentuk utama dan kerutan dapat dikombinasikan untuk membangun suatu sistem biometrika yang sangat akurat.
Gambar 2.9 Pola Tangan
2.7 Metode Chain Code
Suatu pola dari suatu karakter di dalam citra dapat dikenali jika kita mampu mendapatkan ciri-ciri khusus. Setiap objek pasti mempunyai ciri-ciri yang berbeda dengan karakter yang lain. Ciri-ciri berguna untuk membedakan antara pola yang satu dengan yang lain. Ciri yang bagus adalah ciri yang memiliki daya pembeda yang tinggi, sehingga pengelompokan pola berdasarkan ciri yang dimiliki dapat menghasilkan keakuratan yang tinggi. Ekstrasi ciri adalah proses pengambilan ciri-ciri dari suatu objek di dalam citra untuk membedakan objek yang satu dengan yang lain. Chain code adalah metode yang melakukan penelusuran pixel-pixel objek dengan panduan arah mata angin.
14
Gambar 2.10 Arah mata angin
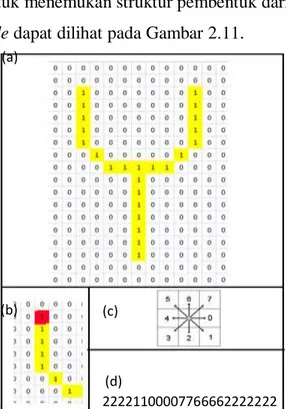
Mekanisme penelusuran disetiap dominant points menyebabkan teknik chain code dapat digunakan untuk menemukan struktur pembentuk dari suatu objek. Ilustrasi proses chain code dapat dilihat pada Gambar 2.11.
Gambar 2.11 (a) Huruf Y Dalam Bentuk Biner, (b) Arah Penelsuran Awal, (c) Acuan
Arah Mata Angin, (d) Hasil Chain Code Untuk Huruf Y
Hasil akhir dari proses ekstraksi ciri berbasis chain code yang dilakukan adalah sebuah vektor ciri yang berisi informasi urutan kode chain code pembentuk huruf. Mekanisme yang dilakukan oleh chain code menghasilkan urutan chain code untuk setiap huruf dapat memiliki panjang yang berbeda, sehingga
22221100007766662222222 (a)
(b) (c)
15 diperlukan sebuah mekanisme normalisasi untuk menyamakan panjang chain code agar dapat digunakan sebagai input pada proses klasifikasi.
Langkah-langkah normalisasi yang dilakukan yaitu merubah chain code menjadi matriks berisi nilai dan frekuensinya, menghapus nilai dengan frekuensi 1 (satu buah), menerapkan rumus normalisasi untuk mencari frekuensi sesuai yang diinginkan, dan membangun ulang chain code sesuai frekuensi yang baru.
Langkah awal normalisasi chain code adalah dengan jittering reduction. Jittering terjadi karena gerakan tangan yang user input-kan tidak sempurna, sehingga titik-titik yang tersimpan menjadi tidak smooth (halus). Cara yang digunakan untuk mengurangi jittering adalah dengan tidak menghiraukan kode direction primitives yang panjangnya kurang dari konstanta yang telah ditentukan. Misalnya terdapat kode direction primitives seperti di bawah ini:
22221100007766662222222
Kode direction primitives akan berubah setelah proses jittering reduction dengan konstanta 3 dilakukan. Kode direction primitives dari chain code di atas akan berubah menjadi:
2222000066662222222
Nilai konstanta jittering didapat dari hasil analisa terhadap hasil direction primitives dari input dengan direction primitive yang diinginkan. Hasil perbandingan menunjukkan bahwa nilai terbesar maksimum jittering yang paling banyak terdeteksi adalah 2 digit.
Prosedur ini akan dilakukan pada setiap stroke yang ada, sehingga setiap stroke akan memiliki chain code. Chain code inilah yang akan digunakan untuk menentukan dominant points serta untuk membandingkan kecocokan antara telapak tangan acuan (reference) dengan yang akan dicocokkan.
Normalisasi frekuensi chain code dibutuhkan karena dari setiap input, frekuensi dari direction primitive yang telah melalui jittering reduction akan
16 selalu berbeda. Nilai frekuensi baru kode ke-i didapatkan dengan rumus normalisasi yang diterapkan sebagai berikut:
𝐹𝑖𝑛 = 𝐹𝑖
Ʃ 𝐹𝑖 𝑁 ………...(2.5)
Contoh dari direction primitives dari sebuah stroke yang telah mengalami jittering reduction menghasilkan kode:
2222000066662222222
Frekuensi yang ditentukan untuk sebuah stroke adalah 10 kode, maka akan dilakukan normalisasi frekuensi kode dengan rumus tersebut di atas.
Frekuensi Angka 2 awal 𝐹𝑖𝑁 = 4 19 10 = 2.1052632 Frekuensi Angka 0 𝐹𝑖𝑁 = 4 19 10 = 2.1052632 Frekuensi Angka 6 𝐹𝑖𝑁 = 4 19 10 = 2.1052632 Frekuensi Angka 2 akhir
𝐹𝑖𝑁 = 7
19 10 = 3.6842105
Hasil akan dibulatkan jika menunjukkan adanya angka dibelakang koma. Kode dari contoh di atas setelah mengalami normalisasi akan berubah menjadi:
2200662222
2.8 Dominant Points
Dominant points adalah titik-titik yang termasuk dalam kategori berikut ini: (a) titik awal dan titik akhir stroke; (b) local extrema; (c) titik tengah yang
17 menghubungkan dua titik dari kategori (a) dan (b) yang berurutan. Konteks kurva dalam hal ini adalah fungsi f (x).
Fungsi f (x) dan f ‘(x1) = 0, di mana x1 adalah angka yang terletak dalam domain dari f, maka x1 disebut angka kritis dari fungsi f. Dan titik (x1,f (x2))
disebut sebagai titik kritis dari fungsi f.
Local extrema mencakup local maxima dan local minima. Kata local dipakai untuk menunjukkan bahwa perhtian hanya diberikan pada interval tertentu pada domain fungsi.
Gambar 2.12 Contoh dominant points
2.8.1 Increasing Function dan Decreasing Function
Interval dalam fungsi dapat ditentukan termasuk increasing atau decreasing dari nilai derivative-nya. Fungsi termasuk fungsi increasing jika nilai deriatifnya berada di atas nol dan akan termasuk fungsi decreasing jikan nilai deriatifnya berada di bawah nol.
18 Gambar 2.13 adalah contoh untuk fungsi 𝑓(𝑥) = 𝑥2− 10𝑥 + 30 yang nilai derivative-nya adalah 𝑓′(𝑥) = 2𝑥 − 10. Batas interval adalah bila nilai derivative-nya nol didapatkan satu nilai, x = 5.
Tabel 2.1 Fungsi decreasing dan increasing pada 𝑓(𝑥) = 𝑥2− 10𝑥 + 30
Interval Tanda dari f ‘(x) Hasil Kesimpulan
(-∞, 5) (-) - decreasing
(5,∞) (+) + increasing
Tabel 2.1 memperlihatkan bahwa fungsi 𝑓(𝑥) = 𝑥2− 10𝑥 + 30 akan bersifat decreasing bila nilai x<5 dan bersifat increasing bila x>5.
2.8.2 Local Maxima dan Local Minima
Titik kritis yang termasuk dalam local maxima atau local minima atau tidak termasuk dalam keduanya dapat diperhatikan dari perubahan tanda derivative-nya. Titik tersebut bisa termasuk local maximum atau local minimum jika terjadi perubahan tanda tersebut, namun jika tidak terjadi perubahan tanda, maka titik tersebut bukan termasuk keduanya.
a) (x1,f (x1)) adalah local maximum jika f ‘(x1) > 0 untuk x < x1 dan f ‘(x1) < 0
untuk x > x1
b) (x1,f (x1)) adalah local minimum jika f ‘(x1) < 0 untuk x < x1 dan f ‘(x1) > 0
untuk x > x1
c) (x1,f (x1)) bukan local maximum maupun local minimum jika f ‘(x1) > 0
untuk x < x1 dan f ‘(x1) < 0 untuk x > x1
Suatu titik dikatakan locam maximum jika pada titik tersebut fungsi berubah dari increasing menjadi decreasing, dan dikatakan local minimum jika pada titik tersebut fungsi berubah dari decreasing menjadi increasing.
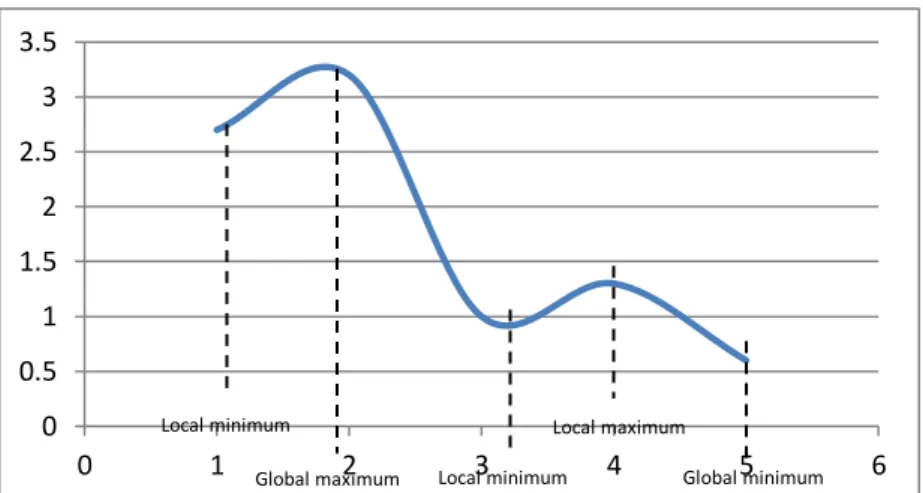
Titik yang merupakan local minimum bisa jadi nilainya (y atau f(x)) lebih besar daripada local maximum, dan begitu juga sebaliknya. Hal ini dikarenakan perhatian diberikan hanya pada domain interval tertentu, tetapi tidak demikian dengan global maximum dan global minimum, karena perhatian diberikan pada seluruh domain. Global maximum adalah local maximum yang memiliki nilai
19 tertinggi pada seluruh domain dan global minimum adalah local minimum yang memiliki nilai paling kecil pada seluruh domain.
Gambar 2.14 Contoh maximum dan minimum
2.9 Direction Primitives
Direction Primitives digunakan untuk mengubah arah gerak ke dalam kode. Arah gerak yang dipakai ada 8 macam, yauti {E, SE, S, SW, W, NW, N, NE}. Arah gerak tersebut akan dikodekan ke dalam bilangan 0 sampai 7.
Gambar 2.15 Direction code untuk 8 arah mata angin
Seluruh arah gerak dikodekan lalu akan didapatkan chain code untuk setiap stroke. Arah gerak dari titik A(xa,ya) ke titik B (xb,yb) ditentukan dari persamaan Δx = xb – xa, dan Δy = yb – ya, jika Δx > 0 maka Δx = 1, jika Δx < 0
0 0.5 1 1.5 2 2.5 3 3.5 0 1 Global maximum 2 3 4 5 6 Local minimum Local minimum Local maximum Global minimum
20 maka Δx = -1. Hal yang sama berlaku untuk Δy, kemudian berdasarkan tabel 2.2 maka dapat diketahui nilai direction primitives-nya (d).
Tabel 2.2 Menentukan direction code berdasarkan Δx dan Δy
di 0 1 2 3 4 5 6 7
Δx 1 1 0 -1 -1 -1 0 1
Δy 0 1 1 1 0 -1 -1 -1
Gambar 2.16 Contoh chain code
2.10 Normalisasi
Normalisasi merupakan proses untuk merubah data menjadi data dalam bentuk normal dimana data normal berarti data tersebut berada dalam range yang diinginkan. Normalisasi sangat diperlukan dalam sistem verifikasi khususnya verifikasi biometri tangan sebab data input-an user tidak akan selalu sama di setiap waktunya, seperti misalnya besar kecilnya sebuah telapak tangan, kemiringan telapak tangan pada media, ratio gambar, dan lainnya yang akan mempengaruhi kualitas verifikasi. Cara kerja sederhana dari normalisasi yaitu saat range data lebih dari range yang dibutuhkan, maka proses normalisasi akan merapatkan data ke range yang diinginkan dan jika range data kurang dari range yang dibutuhkan maka proses normalisasi akan melonggarkan data ke range yang dibutuhkan.
Proses normalisasi pada ukuran sebuah gambar dilakukan dengan melakukan normalisasi pada sisi horisontal dan normalisasi pada sisi vertikalnya.
21 𝑥𝑖 = 𝑥i𝑂− 𝑥𝑚𝑖𝑛
𝑥𝑚𝑎𝑥− 𝑥min𝑊 ………..(2.3)
𝑦𝑖 = 𝑦i𝑂− 𝑦min
𝑦max− 𝑦min𝐻 ………...(2.4)
Titik (𝑥i𝑂, 𝑦i𝑂) adalah data berupa titik yang hendak dinormalisasi, titik (𝑥𝑖, 𝑦𝑖) adalah hasil normalisasi, 𝑥𝑚𝑖𝑛 = 𝑚𝑖𝑛 {𝑥𝑖𝑜}, 𝑦𝑚𝑖𝑛 = 𝑚𝑖𝑛 {𝑦𝑖𝑜}, 𝑥𝑚𝑎𝑥 = 𝑚𝑎𝑥 {𝑥𝑖𝑜}, 𝑦𝑚𝑎𝑥 = 𝑚𝑎𝑥 {𝑦𝑖𝑜} , W dan H adalah lebar dan tinggi yang diinginkan.
Keproposionalan gambar harus tetap terjaga. Ratio gambar input-an dengan gambar setelah mengalami proses normalisasi haruslah proposional. Caranya adalah dengan mengambil ratio gambar masukan kemudian menjadikannya acuan untuk ratio gambar setelah proses normalisasi, contohnya jika bentuk telapak tangan yang dimasukkan bersifat portrait atau degan kata lain memiliki ratio height > width, maka tinggi gambar akan diubah menjadi skala pixel yang ditentukan (misalnya 130 pixel). Lebar gambar akan menyesuaikan berdasarkan ratio yang ada, begitu juga seballiknya, jika bentuk telapak tangan yang dimasukkan bersifat landscape atau dengan kata lain memiliki ratio height < width, maka lebar gambar akan diubah menjadi skala pixel yang ditentukkan (misalkan 280 pixel). Tinggi gambar akan menyesuaikan berdasarkan ratio yang ada.
Ukuran telapak tangan yang diinginkan didapat setelah proses di atas dijalankan. Tiap koordinat titik akan dinormalisasi, baik secara vertical maupun horizontal, kemudian sebuah titik dinormalisasi, koordinatnya dipindah ke tempat yang sesuai agar hasil akhir karakter setelah dinormalisasi akan terletak di tengah-tengah kanvas.
22
2.11 Dynamic Time Warping (DTW)
Dynamic Time Warping adalah metode untuk menghitung jarak antara dua data time series. Keunggulan DTW dari metode jarak yang lain adalah mampu menghitung jarak dari dua vector data dengan panjang berbeda. Jarak DTW di antara dua vector dihitung dari jalur pembengkokan optimal (optimal warping path) dari kedua vector tersebut. Ilustrasi pencocokan dengan DTW ditunjukan pada gambar di bawah ini :
Gambar 2.17 Ilustrasi pencocokan dengan metode DTW
Teknik menghitung DTW yang paling handal adalah metode pemrograman dinamis. Jarak DTW dapat dihitung dengan rumus :
𝐷(𝑈𝑉) = 𝛾(𝑚, 𝑛) ………..(2.15) 𝛾(𝑚, 𝑛) = 𝑑𝑏𝑎𝑠𝑒(𝑢𝑗, 𝑣𝑗) + min[𝛾(𝑖 − 1, 𝑗), 𝛾(𝑖 − 1, 𝑗 − 1), 𝛾(𝑖, 𝑗 − 1)]…..(2.16) 𝛾(0,0) = 0, 𝛾(0, ∞) = 0, 𝛾(∞, 0) = ∞………...(2.17)
Nilai kolom (i, j) terlihat sebagai nilai penjumlahan jalur pembengkokan dari kolom (1,1) hingga (i, j). Kolom dengan nilai 𝛾(𝑖, 𝑗)(1 ≤ 𝑖 < 𝑚, 1 ≤ 𝑗 ≤ 𝑛) dinamakan matrik jarak terjumlahkan. Berikut adalah contoh matrik jarak terjumlahkan :
23
Table 2.3 Ilustrasi matriks jarak terjumlahkan (commulative distance matrix) dengan
2 vektor U={2,5,2,5,3} dan V={0,3,6,0,6,1}
0 3 6 0 6 1 2 4 5 21 25 41 42 5 29 8 6 31 26 42 2 33 9 22 10 26 27 5 58 13 10 35 11 27 3 67 13 19 19 20 15
Tabel berikut menunjukan langkah-langkah mendapatkan matriks jarak terjumlahkan yang ditunjukan pada Tabel berikut :
Tabel 2.4 Langkah 1 Matrik Jarak Terjumlahkan
=kolom1 Komulatif =Komulati f (0-2)2 4 0+4 4 Minimum (0-5)2 25 4+25 29 (0-2)2 4 29+4 33 (0-5)2 25 33+25 58 (0-3)2 9 58+9 67
Tabel 2.5 Langkah 2 Matrik Jarak Terjumlahkan
=kolom2 Komulatif =Komulatif
(3-2)2 1 1+4 5 Minimum
(3-5)2 4 4+4 8
(3-2)2 1 1+8 9
(3-5)2 4 4+9 13
24
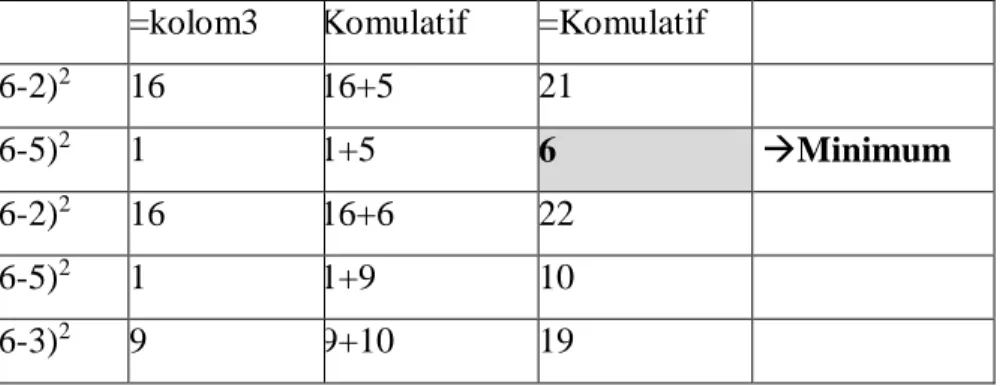
Tabel 2.6 Langkah 3 Matrik Jarak Terjumlahkan
=kolom3 Komulatif =Komulatif
(6-2)2 16 16+5 21
(6-5)2 1 1+5 6 Minimum
(6-2)2 16 16+6 22
(6-5)2 1 1+9 10
(6-3)2 9 9+10 19
Tabel 2.7 Langkah 4 Matrik Jarak Terjumlahkan
=kolom4 Komulatif =Komulatif
(0-2)2 4 21+4 25
(0-5)2 25 25+6 31
(0-2)2 4 4+6 10 Minimum
(0-5)2 25 25+10 35
(0-3)2 9 9+10 19
Tabel 2.8 Langkah 5 Matrik Jarak Terjumlahkan
=kolom5 Komulatif =Komulatif
(6-2)2 16 16+25 41
(6-5)2 1 1+25 26
(6-2)2 16 16+10 26
(6-5)2 1 1+10 11 Minimum
(6-3)2 9 9+11 20
Tabel 2.9 Langkah 6 Matrik Jarak Terjumlahkan
=kolom6 Komulatif =Komulatif
(1-2)2 1 1+41 42
(1-5)2 16 16+26 42
(1-2)2 1 1+26 27
25
(1-3)2 4 4+11 15 Minimum
Hasil “15” adalah jarak minimum seperti tampak pada matriks jarak terjumlahkan pada Tabel 2.9. Metode DTW digunakan untuk sistem pengenalan suara, pencocokan biometri tangan dan dapat diaplikasikan pada sistem pencocokan fitur bentuk biometrika bibir manusia.
2.12 Pengukuran Unjuk Kerja Sistem
Kesalahan pada sistem biometrika dapat terjadi karena dua data biometrika milik orang yang sama tidak selalu mutlak sama. Pengaruh ketidak sempurnaan saat akuisisi data, usia, pekerjaan, derau, kondisi kesehatan, dan lain sebagainya adalah faktor-faktor yang mempengaruhi mengapa dua biometrika yang berasal dari orang yang sama tidak selalu mutlak sama. Sistem tradisional (seperti password dan PIN), selalu dapat memberikan jawaban absolut YA atau TIDAK terhadap pertanyaan apakah PIN yang diverifikasi sama dengan PIN yang diklaim.
Sistem biometrika tidak dapat memberikan jawaban absolut seperti itu. Tanda tangan yang didapat dari orang yang sama pada saat yang berbeda tidaklah selalu mutlak sama. Sistem biometrika hanya dapat memberikan jawaban seberapa besar tingkat kemiripan dua biometrika yang diuji atau seberapa besar probabilitas dua biometrika yang diuji berasal dari orang yang sama. Jenis-jenis kesalahan yang dijadikan tolak ukur dalam pengukuran unjuk kerja sistem biometrika adalah decision error rate, matching error rate, dan image acquisition rate.
2.12.1 Rasio Kesalahan Keputusan
Unjuk kerja suatu sistem biometrika seringkali dinyatakan dengan rasio kesalahan keputusan (decision error rate), yaitu rasio kesalahan penerimaan (false acceptance rate) dan rasio kesalahan penolakan (false rejection rate)
False Acceptance Rate (FAR) menyatakan bagian transaksi dengan klaim salah terhadap identitas (yang terdaftar di sistem) ataupun non-identitas (yang tidak terdaftar di sistem) yang diterima sistem, sedangkan False Rejection Rate (FRR) menyatakan bagian transaksi dengan klaim benar terhadap identitas (yang
26 terdaftar di sistem) ataupun non-identitas (yang tidak terdaftar di sistem) yang ditolak sistem.
2.12.2 Rasio Kesalahan Pencocokan
Rasio kesalahan pencocokan (matching error rate) menyatakan probabilitas terjadinya kesalahan pencocokan pada sistem. Terdapat 2 jenis rasio kesalahan pencocokan, yaitu rasio kesalahan kecocokan (false match rate) dan rasio kesalahan ketidakcocokan (false non match rate) ((Putra, 2010, p34).
False Match Rate (FMR) menyatakan probabilitas sampel dari pengguna cocok dengan acuan yang diambil secara acak milik pengguna yang berbeda. False match rate disebut juga false positive. Rasio kesalahan kecocokan dihitung dengan rumus :
𝐹𝑀𝑅 = 𝐽𝑢𝑚𝑙𝑎ℎ 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑐𝑜𝑐𝑜𝑘
𝐽𝑢𝑚𝑙𝑎ℎ 𝑘𝑒𝑠𝑒𝑙𝑢𝑟𝑢ℎ𝑎𝑛 𝑝𝑒𝑛𝑐𝑜𝑐𝑜𝑘𝑎𝑛 𝑥 100%...(2.18) False Non Match Rate (FNMR) menyatakan probabilitas sampel dari pengguna tidak cocok dengan acuan lain yang diberikan pengguna yang sama. False non match rate disebut juga false negative. Rasio kesalahan ketidakcocokan dihitung dengan rumus :
𝐹𝑁𝑀𝑅 =
𝐽𝑢𝑚𝑙𝑎ℎ 𝐾𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑇𝑖𝑑𝑎𝑘 𝐶𝑜𝑐𝑜𝑘
𝐽𝑢𝑚𝑙𝑎ℎ 𝐾𝑒𝑠𝑒𝑙𝑢𝑟𝑢ℎ𝑎𝑛 𝑝𝑟𝑜𝑠𝑒𝑠 𝑝𝑒𝑛𝑐𝑜𝑐𝑜𝑘𝑎𝑛 𝑥 100%…..…………(2.19)
FMR seringkali disamakan dengan FAR, dan FNMR disamakan dengan FRR. FMR dan FNMR pada umumnya tidak sama dengan FAR dan FRR. FMR dan FNMR diperhitungkan dari jumlah perbandingan (pencocokan) yang dilakukan, sedangkan FAR dan FRR diperhitungkan dari keseluruhan transaksi. 2.12.3 Grafik Receiver Operation Characteristics (ROC)
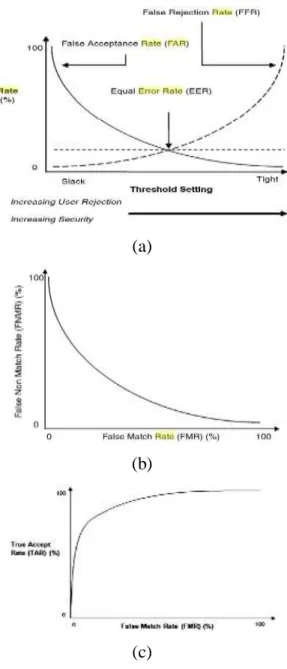
Grafik karakteristik operasi penerima (ROC) adalah grafik yang digunakan untuk menunjukan unjuk kerja suatu sistem biometrika. ROC memiliki 3 jenis model grafik seperti ditunjukan pada Gambar 2.14.
Gambar 2.18 (a), sumbu x menyatakan nilai ambang dan sumbu y menyatakan FAR/FRR atau FMR/FMNR. Pada Gambar 2.18 (b), sumbu x menyatakan FRR (FNMR) dan sumbu y menyatakan FAR (FMR), sedangkan pada Gambar 2.18 (c) sumbu x menyatakan FAR (FMR) dan sumbu y
27 menyatakan GAR (Genuine Acceptance Rate). Salah satu dari ketiga grafik tersebut dapat digunakan untuk mewakili untuk kerja suatu sistem biometrika.
(a)
(b)
(c)
Gambar 2.18 (a), (b), (c) Model grafik ROC
GAR menyatakan tingkat kesuksesan pengenalan suatu sistem biometrika (bukan tingkat kesalahan) dan dapat dinyatakan sebagai :
GAR = 1 – FRR, atau GAR = 1 – FNMR
………...(2.20)
Menghitung GAR berarti menghitung seberapa besar sistem sukses mengenali pengguna secara benar.