i
Prosiding
AAU ADISUCIPTO, YOGYAKARTA
28 - 29 APRIL 2010
Penyelenggara :
Pusat Penelitian Elektronika dan Telekomunikasi Lembaga Ilmu Pengetahuan indonesia (PPET – LIPI) Sekolah Teknik Elektro dan Informatika (STEI-ITB)
International Research Centre for Telecommunication and Radar (IRCTR) Delft University of Technology (TU Delft) The Netherlands
Asosiasi Radar Nasional (AsRI)
Akademi Angkat an Udara (AAU)
Sponsor :
PT. ROHDE & SCHW ARZ Indonesia
Pr osiding Seminar Radar Nasional 2010., Yogyakart a, 28-29 Apr il 2010., ISSN : 1979-2921
ii
Prosiding
Seminar Radar Nasional 2010
ISSN : 1979 - 2921
Hak cipta © 2010 oleh Pusat Penelitian Elektronika dan Telekomunikasi – LIPI
Hak cipta dilindungi undang-undang. Dilarang menyalin, memproduksi dalam segala bentuk, termasuk
mem-
fotocopy
, merekam, atau menyimpan informasi, sebagian atau seluruh isi dari buku ini tanpa ijin
tertulis dari penerbit.
Prosiding Seminar Radar Nasional / [editor by] Mashury Wahab.
vi + pp.; 21,0 x 29,7 cm
ISBN : 1979 - 2921
Radio Detecting and Ranging (Radar)
Technical editing by Arief Nur Rahman, Taufiqqurachman, and Hana Arisesa,
Cover design by Yadi Radiansah.
Diterbitkan oleh :
Pusat Penelitian Elektronika dan Telekomunikasi (PPET)
Lembaga Ilmu Pengetahuan Indonesia (LIPI)
iii
Pelindung
: Deputi Bidang IPT – LIPI
Gubernur AAU
Penanggung jawab
: Kepala PPET – LIPI
Ketua
: Dr. Mashury
Wakil Ketua
: Ir. Yuyu Wahyu, MT
Panitia Lokal AAU
: Kol. Lek. Yoko Wasis T, ST,MT
Letkol. Lek. Arwin D.W. Sumari,ST,MT
Sekretaris
: Noorfiya Umniyati, S. I. Kom
Lisdiani
Bendahara
: Sugiantoro
Seksi-Seksi
Acara
1. Ir. Pamungkas Daud, MT 2. Drs. Agus H, MM.MBA
Registrasi
1. Sulistyaningsih, ST 2. Ir. Sri Hardiati 3. Hana Arisesa, ST 4. Arief Nur Rahman,S.Si 5. Poppy Sumarni 6. M. Mahdi
MC
1. Rr. Widhya Yusi S., SE, MT 2. Lia Muliani Pranoto, ST
Asrot
1. Yudi Yulius Maulana, ST 2. Deni Permana K. 3. Ekojoni P.
Publikasi/Makalah
1. Lilis Retnaningsih, S.Si 2. Iqbal Syamsu, MT 3. Taufiqqurrachman,ST 4. Arief Nur Rahman,S.Si 5. Hana Arisesa, ST 6. F.H. Kana
7. Yadi Radiansyah, ST
Pameran & Perlengkapan
1. Patricius Sriyono 2. Mudjidjat 3. Kusnadhi 4. Aseni
5. Syarif H. Umaran
Dokumentasi
1. Dicky Desmunandar
Konsumsi
1. Anna K.T
Pr osiding Seminar Radar Nasional 2010., Yogyakart a, 28-29 Apr il 2010., ISSN : 1979-2921
iv
KATA PENGANTAR
Puji dan Syukur kami panjatkan kehadirat Allah SWT yang telah melimpahkan rahmat dan hidayah-Nya
sehingga Prosiding Seminar Radar Nasional (SRN) IV tahun 2010 ini dapat diselesaikan tepat pada
waktunya.
Penyelenggaraan SRN IV tahun 2010 ini dilakukan bersama oleh PPET-LIPI dan AAU. Tujuan
diadakannya SRN IV ini adalah menjadi sarana sosialisasi dan forum pertukaran informasi antara para
pakar, peneliti, akademisi, pengamat, dan pengguna dibidang Radar, komunikasi tanpa kawat, dan
elektronika pertahanan. Hasil-hasil dari SRN IV ini diharapkan dapat membantu pemerintah dalam
mengatasi permasalahan Radar di Indonesia dalam bentuk usulan teknologi, kebijakan, dan solusi lain.
Kami panitia SRN IV 2010 sangat bergembira dengan antusiasme dari seluruh pembicara tamu,
pemakalah, peserta dan hadirin sekalian dalam event ini karena para pembicara tamu yang hadir
sangat prestisius, jumlah makalah sangat banyak dan jumlah peserta yang lebih besar dibandingkan
penyelenggaraan Seminar Radar pada tahun-tahun sebelumnya.
Akhirnya panitia mengucapkan terima kasih yang sebesar-besarnya kepada Menneg Ristek RI,
KASAU, Kepala LIPI, Deputi IPT–LIPI, Dirjen Hubla Dephub, Dekan STEI ITB, Director IRCTR
TU-Delft, Deputi Menristek Bidang Program Riptek, Perwakilan dari MABES TNI-AL, Gubernur AAU dan
seluruh stafnya, peserta dan semua pihak yang telah membantu hingga terselenggaranya acara
Seminar Radar Nasional IV ini.
v
Kata Pengantar
... iv
Daftar Isi
... v
Pr osiding Seminar Radar Nasional 2010., Yogyakart a, 28-29 Apr il 2010., ISSN : 1979-2921
vi
Daftar Makalah
1.
Aplikasi Radar Ionosfer untuk deteksi gangguan Komunikasi Radio dan
Navigasi ………
Effendy, Nancy.R
1-6
2.
Unjuk Kerja Algoritma SAGE untuk Karakterisasi Statistik Parameter
Spasial dan Temporal Sinyal Lintasan Jamak dengan Antena Array
Kubus ………
Firdaus, P. Handayani, G. Hendrantoro
7-11
3.
Estimasi Arah Kedatangan Sinyal (DOA) Dengan Menggunakan
Algoritma MUSIC Pada Antena Array Kubus ………
Muhammad Syahroni, Puji Handayani, Gamantyo Hendrantoro
12-15
4.
Pengukuran Model Propagasi Outdoor dan Indoor Sistem WiMAX
2.3GHz di Lingkungan Kampus ITB ………
Arsyad Ramadhan Darlis, Trasma Yunita, Joko Suryana
16-21
5.
Pengukuran Kanal Propagasi 3.9g Pada Frekuensi 700, 1700, 2000 MHz Di
Lingkungan Outdoor ITB ………..
Sinung Tegar, Henry Andrian, Nomarhinta Solihah, Joko Suryana
22-25
6.
Antena Mikrostrip Pita Lebar Bentuk “T” dengan Slot Persegi Panjang
untuk Aplikasi Radar Penembus Dinding……….
Tommi Hariyadi, Achmad Munir, Endon Bharata, Andriyan Bayu Suksmono,
Kusworo Adi, Antonius Darma Setiawan, Donny Danudirdjo
26-29
7.
Konsep
dan Desain Sistem Pemantauan Jarak Jauh berbasis
Mikrokontroller ARM Cortex Pada Radar Plessey AR 325 Commander …
Moh. Arif Sarony, Yudi Satria Gondokaryono, Arwin Datumaya Wahyudi
Sumari
30-36
8.
Analisa Karakteristik Patch Heksagonal pada Beberapa Jenis Substrat
Dielektrik yang Berbeda untuk Aplikasi Microwave Radar Absorber ……
Frida Kurniasih, Achmad Munir
37-40
9.
Open Problem pada Fire-Control Radar ………..
Adha Imam Cahyadi, Budi Bayu Murti, Nur Sulistyowati, Maun Budiyanto
41-44
10. Automatic Dependent Surveillance – Broadcast (ADS-B) dan Prospek
Pengaplikasiannya di TNI-AU ………...
Arya Putra Kurniawan, Arwin Datumaya Wahyudi Sumari
45-50
11. Analisa Numerik Karakteristik Refleksi dan Transmisi dar Material
Artificial Dielectric ………...………
Achmad Munir
51-54
12.
Pengembangan Teknik De-embedding untuk Pengolahan Data KarakterisasiMaterial Microwave Radar Absorber ……….
Achmad Munir
vii
Rohani Jahja Widodo
15. Data Ekstraktor Dengan Metode Nearest Neighbor Clustering Pada Radar
Indera ………...………
Deni Yulian, A. A. Lestari
68-71
16. Sistem Warning dan Blackbox pada ECDIS sebagai Penunjang
Keselamatan Pelayaran ……….………
Doddy D. Patriadi dan Wahju Sediono
72-74
17. Desain Interface NMEA 0183 Untuk Radar INDERA ………
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
1
Aplikasi Radar Ionosfer untuk Deteksi Gangguan
Komunikasi Radio dan Navigasi
Effendy, Nancy.R
Pusat Pemanfaatan Sains Antariksa LAPAN BANDUNG Jl.Dr. Junjunan No. 133 Bandung Telp. 022-6012602 Fax: 022-6014998
Email : [email protected]
ABSTRAK
Perkembangan teknologi radar semakin meningkat pada abad ke 20 ini, baik untuk kajian penelitian sains struktur fisis atmosfer bumi termasuk Ionosfer menggunakan Atmosferik radar maupun pemanfaatan teknologi radar bagi pertahanan Militer dimasa depan. Secara umum teknologi radar ini paling efisien untuk pengamatan terus-menerus di daerah tertentu yang tidak memungkinkan dengan teknologi lain seperti Roket maupun Satelit. Penggunaan spektrum gelombang elektromagnetik antara frekuensi HF hingga UHF telah banyak dilakukan untuk aplikasi radar dengan pemanfaatan Ionosfer sebagai medium disversif, bertujuan untuk studi ilmiah lingkungan Atmosfer bumi dan Ionosfer , setidaknya terdapat dua alasan menyangkut penelitian dasar untuk memahami fenomena kompleks di lingkungan Atmosfer bumi kita serta berorientasi pada aplikasi Sistem Komunikasi radio dan Sistem Navigasi. Aplikasi Ionosferik Radar dan HF Radar, MF radar maupun VHF radar merupakan kontribusi besar bagi pemahaman dan peningkatan pengetahuan kita tentang dinamika kerapatan plasma , yang sesuai dengan pengoperasian rentang frekuensi bagi penggunaan radar. Uraian dalam makalah ini memberikan gambaran tentang hubungan fisis proses kopling antara Atmosfer bawah dan Ionosfer bumi kita , upaya untuk mendeteksi sumber gangguan di Ionosfer dengan mempertimbangkan perkembangan sistem terbaru pengamatan ground base maupun space base, serta metode , model dan data untuk aplikasi penelitian Atmosfer maupun Ionosfer .Pada kajian makalah ini telah dilakukan analisis, penggunaan Atmosferik radar dan kombinasi dengan data Satelit serta hasil simultan pengukuran dinamika Atmosfer bumi dan Ionosfer, diharapkan dapat memberikan informasi tingkat keberhasilan bagi pengguna Komunikasi radio dan minimisasi eror bagi Navigasi untuk meningkatkan akurasi bagi penentuan posisi.
Kata kunci : radar, medium disversif, Ionosfer, komunikasi radio, navigasi.
1. PENDAHULUAN
Sejarah tentang "Radio Deteksi And Ranging" (RADAR) perkembangan awal pada abad kesembilan belas / awal abad kedua puluh,pada tahun 1904 paten untuk deteksi benda logam jauh menggunakan gelombang listrik diberikan kepada Hulsmeyer
Christian dari Jerman. sedangkan penelitian intensif
baru mulai pada tahun 1930 ,pemanfaatannya dengan tujuan menggunakan teknik radar untuk aplikasi militer.
Selama perang Dunia II, teknologi dan sistem radar tumbuh pesat.,dalam tahun-tahun berikutnya peranan penelitian terus berkembang tentang kemampuan radar. Sejak ditemukannnya teknologi
seperti Synthetic-Aperture Radar (SAR) dan
pengembanagn lebih lanjut diperuntukan bagi aplikasi non militer.
Hamburan dan refleksi gelombang
elektromagnetik pada ketidakteraturan indeks bias atmosfir bumi telah menjadi subyek penelitian sangat penting dalam radio sains. Refleksi total pada gelombang frekuensi tinggi merupakan mekanisme utama untuk mempelajari ionosfer dengan radar HF seperti halnya Ionosonda.
Hamburan balik dari ketidakteraturan di atmosfer dan ionosfer pada spektrum frekuensi tinggi diketahui setelah penemuan teknik radar, teknologi ini merupakan sarana paling efektif untuk mempelajari atmosfer dan ionosfer.
2 Untuk mendeteksi gangguan komunikasi dan navigasi ,berawal pada pemahaman dinamika media propagasi Ionosfer. Sumber variabilitas ionosfer telah kita ketahui bersama bahwa gangguan utama iregularitas ionosfer berasal dari Matahari dan tingkat aktivitas medan magnit bumi, pada kondisi relatif tenang iregularitas ionosfer berasal dari interaksi gelombang gelombang atmosfer seperti halnya
Atmospherics Gravity Wave( AGW), Tide, dan Planetary Wave ( PW) , menurut defines AGW ( are disturbances which are allowed to propagate as a consequence of buoyant forces present in the atmosphere), tdimana terjadi transfer energy dan
momentum setiap harinya sebesar 10 16 Joule secara
vertikal yang dapat mencapai ketinggian lapisan
Ionosfer hingga menyebabkan ketidakstabilan,
sehingga memicu terjadinya iregularitas di Ionosfer, kondisi ini yang dapat menimbulkan gangguan komunikasi radio dan satelit , untuk memahami perilaku dinamika Ionosfer dan Atmosfer diperlukan sebuah tool yang dapat mengkaji dengan melakukan pengukuran jarak jauh mengggunakan tehnik radar, dari berbagai pengggunan radar untuk studi ionosfer bumi dan atmosfer berdasarkan fungsi dan penggunaan spectrum frekuensi terbagi menjadi HF radar dan MF radar serta VHF radar, analisis data output dari masing masing radar memvisualisasikan kondisi dinamis fenoma di atmosfer bawah hingga ketinggian Ionosfer.
Secara khusus teknik ini paling sesuai untuk pengamatan terus-menerus pada daerah tertentu, yang tidak mungkin dengan teknik lain seperti roket ataupun satelit. Kombinasi pengukuran dengan radar maupun data satelit meningkatkan hasil yang lebih signifikan tentang karakteristik dan analisis fisis fenomena di Atmosfer maupun Ionosfer bumi kita.
2. PRINSIP PENGUKURAN.
Radar (Radio Detection And Ranging) adalah cara untuk mendeteksi dan studi target dari jarak jauh dengan mengirimkan sebuah pulsa radio dalam arah sasaran dan mengamati refleksi dari gelombang pada dasarnya berupa echo gelombang radio, berberapa pengamatan radar dikelompokan menjadi ,target range, target angles( azimuth dan elevasi), target size (radar cross section) ,target speed (Doppler), target features
(imaging). Pada makalah ini dibatasi pada
pemanfaatan untuk deteksi Atmosfer dan Ionosfer. Radar untuk deteksi iregularitas ionosfer telah lama berkembang sejalan dengan kemajuan teknologi, kemampuan dari beberapa radar serta jangkuan wilayah pengukuran untuk , HF, VHF diklasifikasikan berdasarkan fungsinya berikut ini ditunjukan Tabel 1. frekuensi dan rata2 power yang digunakan;
Troposfer, Stratosfer, Mesosfer, ionosfer dan
thermosphere tersebut, serta bahkan sampai dengan Eksosphere .
Tabel.1 Spektrum frekuensi radar Atmosfer.
2.1 Ionosonda.
Ionosonda atau Radar HF berfungsi untuk mengetahui profil kerapatan Ionosfer sebagai fungsi ketinggian, prinsip kerjanya, fungsi Ionosonda adalah memancarkan gelombang radio frekuensi tinggi, menyapu dari frekuensi rendah ke tinggi, mengukur waktu yg diperlukan bagi propagasi sinyal dan kembali dipantulkan dari lapisan ionosfer.
Seperti telah kita ketahui penjalaran pulsa frekuensi radio lebih lambat (kecepatan grup) di ionosfer dari pada di ruang hampa, sehingga tinggi semu terekam bukan tinggi sebenarnya.
Untuk frekuensi mendekati maksimum frekuensi plasma pada lapisan tertentu, tinggi semu cenderung menjadi tak terbatas karena gelombang harus menempuh jarak efektif hingga pada kecepatan nol.
ionogram dapat memberikan hubungan antara
gelombang radio dan frekuensi ketinggian semu lapisan yang dipantulkan ionosfer.
Dari ionograms, nilai-nilai karakteristik
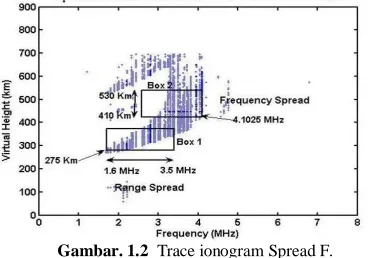
ketinggian virtual hE, hF1 dan hF2 dan frekuensi kritis foF1 dan foF2 dapat diskalakan secara manual atau digital. Modern ionosonde (digisonde) ionogram skala rutin seperti pada contoh ionogram Gambar. 1.
Gambar.1.1 Trace output dari Ionosonda berupa
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
3 output dari ionogram yang biasa dihasilkan setiap 15 menit pengukuran merupakan gambaran kondisi lapisan ionosfer sinyal echo balik dipantulkan terhadap ketinggian dan frekuensi yang dapat dipantulkan, dari pengamatan routin ionogram dapat diketahui pola dan karaktersitik dari ionogram dengan melakukan skaling trace ionogram secara manual mapun otomatis, dari pengukuran diperoleh juga anomaly ionogram yang berkaitan denan kondisi lebih dinamis di lapisan ionosfer, seperti halnya pada contoh ionogram berikut. Untuk mengetahui dari dua kurva mewakili gelombang ordiner dan extraordiner. Kurva dengan frekuensi tinggi fxF1 dan fxF2 adalah gelombang extraordiner, pemunculan extraordiner ini bisanya dikaitkan dengan propagasi sinyal tegak lurus terhadap garis gaya medan magnit bumi. Beberapa peristiwa yang berpengaruh pada propagasi di Ionosfer munculnya lapisan Esporadis dan lapisan Spread F ,pada ionogram ini menunjukan fenomena di ionosfer terjadi prose fisis iregularitas ionosfer yang bersumber dari plasma buble sejalan dengan terjadinya AGW, berikut ini gambar ionogram Spread F yang dapat dikatagorikan menjadi dua trace meliputi range spread atau frekuensi spread.
Gambar. 1.2 Trace ionogram Spread F.
Range spread F menggambarkan kondisi di mana terjadi beberapa echo pada ketinggian yang berbeda untuk masing-masing frekuensi sedangkan Frekuensi Spread F merujuk pada kasus dimana terjadi beberapa
echo pada frekuensi yang berbeda untuk
masing-masing ketinggian.
2.2 Incoheren backscatter radar
Radar scater inkoheren adalah teknik paling powerfull untuk studi ionosfer bumi dan interaksi dengan atmosfer atas, magnetosfer, dan medium interplanetary. Teknik ini didasarkan pada prinsip radar yang merupakan teknik untuk mendeteksi dan mempelajari sasaran jauh dengan transmisi gelombang radio ke arah sasaran dan mengamati refleksi gelombang.
Target dari setiap radar tersebar inkoheren adalah elektron yang terdiri dari ionosfer. Karena jumlah energi yang tersebar oleh masing-masing elektron dikenal, kekuatan echo diterima dari ionosfer mengukur jumlah elektron dalam volume hamburan, sehingga kerapatan elektron. Lebar dari spektrum
adalah ukuran suhu ionosfer yang dapat berbeda untuk ion dan elektron.
Bentuk spektrum adalah fungsi sensitif dari rasio temperatur elektron dan ion. Karena campuran ion dan elektron (juga dikenal sebagai plasma) adalah selalu bergerak selain gerak termal, sebuah pergeseran keseluruhan spektrum dapat dideteksi dari mana kecepatan ion dan elektron dapat disimpulkan. Prinsip dasar pengukuran temperatur, tekanan dan kecepatan angin dijelaskan sebagai berikut, Elektron di ionosfer adalah target radar elektron ini dapat menghamburkan gelombang radio.
Kekuatan dari echo yang diterima dari ionosfer mengukur jumlah elektron dapat menghamburkan gelombang radio atau apa yang kita sebut dengan tekanan electron. Beberapa elektron bergerak karena panas dalam hal ini echo tersebar echo akan berisi berbagai frekuensi yang dekat dengan frekuensi pemancar. Dengan naiknya suhu, elektron bergerak lebih cepat, jadi, radar dapat berperan seperti termometer dan mengukur suhu ionosfer.
Ketika sebuah elektron terlepas dari sebuah atom, atom menyisakan yg disebut ion.gas ion dapat memiliki temperatur yang berbeda dari elektron gas, elektron / campuran ion dikenal sebagai plasma dan biasanya bergerak (seperti angin kita), Sehingga incoherent radar dapat juga mengukur kecepatan angin.
2.3 Deteksi dengan satelit GPS.
GPS merupakan satelit navigasi yang dapat berfungsi sebagai“tools”penelitian ionosfer, konstelasi GPS terdiri dari 24 satelit navigasi yang mengelilingi bumi setiap 12 jam dan secara kontinu memancarkan sinyal radio membawa sinyal informasi navigasi serta informasi lainnya yang pemanfaatannya untuk penelitian transionosferic propagation, dua sinyal pancar dari satelit GPS ( band L ) secara simultan dari berbagai sudut elevasi dan azimuth mengalami delay time pada penerima di bumi, keadaan demikian dapat menggambarkan keadaan fisis ionosfer setempat, pemanfaatan lainnya dapat mengetahui terjadinya perubahan random fasa dan amplitudo sinyal dengan mengamati perubahn C/No dari sinyal yang diterima dibumi, akibat lainnya menyebabkan degradasi sinyal GPS setelah menembus ionosfer keadaan demikian mengindikasikan adanya iregularitas di ionosfer dan peran ionosfer sebagai medium dispersif.
Dalam penurunan kerapatan plasma yang disebabkan oleh gelembung plasma, iregularitas plasma dengan berbagai ukuran skala spasial terjadi (Basu et al., 1.978). ketika sinyal radio melewati bagian kecil iregularitas kerapatan plasma ionosfer menghasilkan fluktuasi amplitudo sejak terjadi
iregularitas menghasilkan hamburan difraksi.
Fenomena ini dikenal sebagai sintilasi amplitudo.
Ukuran skala-iregularitas yang menyebabkan
amplitudo sintilasi sesuai dengan skala pertama
4 300-400 km. Oleh karena itu, terjadinya gelembung plasma dapat dideteksi oleh sintilasi pengukuran GPS (Ogawa et al., 2008).
3. Mekanisme iregularitas Ionosfer yang
berdampak pada komunikasi radio dan Navigasi.
Gravity wave dan planetary wave diakui menjadi bagian yang bertanggug jawab akibat ketidak pastian dalam hal prediksi propagasi gelombang radio di Ionosfer dan forcasting terhadap kebutuhan telekomunkasi.dengan alasan demikian diperlukan penguasaan pengetahuan untuk studi tentang kopling antara Atmosfer bawah dan Atmosfer atas yang tujuan akhirnya memahami karakteristik fisis Ionosfer untuk aplikasi komunikasi dan navigasi. Dari kajian ini terdapat 3 buah radar untuk mendeteksi iregularitas Ionosfer yang mempengaruhi kinerja komunikasi radio dan Navigasi, HF radar/Ionosonda, MF radar dan VHF radar gelombang AGW mendetekasi adanya gravity wave, tide dan planetary wave dari analisis periodisitas yang diperoleh dari data pola angin netral meridional maupun zonal yang terekam oleh MF radar, Gravity wave dan planetary wave memberikan kontribusi energy dan masa pada lapisan E ionosfer gelombang angin netral menghasilkan medan listrik didareah E atau yang dikenal dngan efek dynamo dan bergerak hingga ke lapisan F pada kondisi ini terjadi drift ( ExB ) terjadi pergerakan keatas yang terjadi pada siang hari, ketika malam hari kembali ke wilayah semula (fountain effect) kondisi demikian menghasilkan kerapatan di puncak dan akan menghilang pada tengah malam , sejalan fenomena diatas dari sisi lain pengamatan dengan Ionosonda pada ionogram terekam adanya trace Spread F pada malam hari maupun
peristiwa Sporadis E, siang hari hal ini
mengindikasikan terjadinya iregularitas di lapisan Ionosfer, dengan melihat pengaruhnya pada propagasi satelit GPS simultan pengukuran yang disebabkan plasma buble di daerah anomaly ekuator.
Berdasarkan beberapa hasil penelitian terdahulu disimpulkan bahwa peristiwa sintilasi paling sering terjadi di daerah ekuator dan kutub magnet. Kondisi ionosfer dikaitkan dengan adanya anomali ekuator (“crest region“), yang disebabkan oleh interaksi pergerakan elektron dengan medan magnit bumi yang dikenal dengan “fountain effect“. Anomali ini terbentuk beberapa jam setelah matahari terbenam dan menghilang pada tengah malam. Pada “crest region” sering terjadi sintilasi dan menimbulkan perubahan TEC yang besar sehingga menyebabkan kesalahan pada penentuan posisi berbasis satelit maupun gangguan pada sinyal satelit komunikasi. Secara umum proses coupling diatas dapat digambarkan dengan diagram yang ditampilkan sebagai berikut;
Gambar 3.1 Blok diagram mekanisme gangguan pada
komunikasi dan navigasi
4. HASIL DAN PEMBAHASAN
Untuk kajian pada makalah ini telah dilakukan ploting dan analisis data untuk mengetahui perilaku dari iregularitas ionosfer yang mempengaruhi tingka
keberhasilan komunikasi radio dan navigasi
berdasarkan hasil pengamatan menggunakan radar dan veifikasi dengan peristiwa yang terekam oleh satelit GPS sejalan dengan peristiwa sintilasi
Gambar 4.1 Ionogram non spred F dan Spread F
MF radar memberikan output pola zonal (arah Timur – Barat) dan meridional ( arah Utara – Selatan ) yang diperlihatkan gambar berikut, variansi GW pada
ketinggian yang sama di Kototabang dan
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
5 Gambar 4.2 Variansi zonal dan meridional MF radar
dan VHF radar .
Telah dilakukan ploting waktu variasi musiman dan lokal FAI diamati di Kototabang yang terletak di
lintang rendah magnetik. FAI diamati dapat
diklasifikasikan menjadi dua jenis; FAI disertai dengan buble plasma ekuator, dan yang lainnya FAI mirip dengan yang telah diamati di lintang tengah-. Pengamatan telah dilakukan dan secara rutin radar VHF Backscatter beroperasi pada frekuensi 30,8 MHz Kototabang sejak Februari 2006. Dari data VHF radar rentang pengamatan 2006 sampai 2007 hasil ploting power echo dari VHF radar pada frekuensi 30.8 MHz terjadi antara jam 20 s/d 6 pagi lokal time terlihat
peniningkatan SNR pada tingkat indeks S4 pengukuran
ini adalah sekitar 0,2. jumlah kejadian tertinggi antara 2.000-0.100 LT sekitar equinox Maret tahun 2006. jumlah kejadian yang tinggi ini bertepatan dengan kejadian FAI ,namun GPS sintilasi tidak diamati pada pasca-tengah malam pada bulan Mei-Agustus, ketika FAI F-region yang diamati oleh radar VHF Otsuka et. al.. (2006) telah menganalisis data yang diperoleh di sintilasi GPS Kototabang dalam dua tahun (2003-2004) dan mengungkapkan bahwa sintilasi sering terjadi antara 2000 - 0100 LT di ekuinoq dan tingkat kejadianya adalah lebih tinggi pada bulan Maret-April dari selama September-Oktober. asimetri ini yg panjangnya siang dan malam sama-sama dalam tingkat kejadian sintilasi GPS konsisten dengan hasil pengamatan. Namun demikian, tingkat kejadian pada tahun 2006 dan 2007 lebih rendah dari tahun 2003-2004. Seiring terjadinya S4 terjadi degradasi sinyal
bervariatif antara 5- 10 dB, dilakukan pula analisis masing masing satelit visibel diperoleh sejumlah satelit yang terpengaruh ketika terjadi sintilasi ionosfer, sejumlah satelit mengalami reduksi sehingga perioda waktu tersebut dihindari untuk kegiatan
pengukuran navigasi dan komunikasi karena
menghasilkan kinerja penerima dengan akurasi yang sangat rendah.
Gambar 4.3 Ploting echo VHF radar dan GPS
Sintilasi.
Simultan pengukuran dimatai padaVHF radar dan GPS Sintilasi menunjukan adanya korelasi untuk bulan tertentu pada waktu local yang sama
Gambar 4.4 Ploting echo power VHF radar
Untuk mengetahui global iregularitas Ionosfer pada lokasi yang berbeda Bandung dan Kototabang
ternyata jumlah kejadian S4 dan Sphi pengamatan
dengan penerima GPS menunjukan hasil yang
signifikan antara kejadian S4 dan iregularitas yang
diamati oleh power echo VHF radar pada lapisan F seperti diperlihatkan pada Gambar 4.5.
6 Gambar 4.5 Pengamatan jumlah kejadian S4 di
Bandung dan echo VHF radar tahun 2008.
Posisi geografi Indonesia akan sangat
dipengaruhi oleh iregularitas di Ionosfer sehingga ketika terjadi deplesi plasma buble di Ionosfer yang mengakibatkan iregularitas propagasi transionsofer sinyal GPS akan mengalami degradasi hingga beberapa decibel akibat fluktuasi dari singnal to noise ratio serta terjadi lock time pada L1 frekuensi.
Gambar 4.6 Ploting S4 dan Sphi serta Lock time dan
konversi S4 terhadap lost signal.
5. KESIMPULAN
Untuk mendeteksi gangguan komunikasi dan navigasi ,bermula pada pemahaman dinamika media propagasi Ionosfer. Sumber variabilitas ionosfer telah kita ketahui bersama bahwa gangguan utama iregularitas ionosfer berasal dari Matahari dan tingkat aktivitas medan magnit bumi, pada kondisi relatif tenang iregularitas ionosfer berasal dari peningkatan atmosferik gravity wave, pasang surut dan planetary wave, dimana terjadi transfer energy dan momentum secara vertikal yang dapat mencapai ketinggian lapisan
bagi pemahaman dan peningkatan pengetahuan kita tentang variabilitas kerapatan plasma. Pemahaman tentang fisis AGW , Planetary wave diperlukan untuk mengetahui proses transfer energi dari bawah ke atas sejalan dengan iregularitas ionosfer yang bersumber dari atmosfer bawah permukaan bumi.
Dengan analisis data kombinasi pengamatan HF radar, VHF radar dan Satelit GPS dapat mendeteksi iregularitas ionosfer yang berpotensi pada gangguan komunikasi radio , komunikasi satelit maupun navigasi akurasi untuk pengukuran posisi.
Penurunan desibel pada propagasi sinyal satelit ketika terjadi iregularitas di ionosfer dipicu oleh AGW akan berpengaruh pada rendahnya tingkat keberhasilan bagi pengguna Komunikasi radio dan komunikasi satelit, upaya pada kajian ini memberikan informasi tentang minimisasi eror bagi Navigasi untuk peningkatan akurasi.
6. DAFTAR REFERENSI
[1]. A.W Wernick et.al Ionospheric irregularities scintillation and its effect on System,Actageophysica Polonica,Vol 52,2004.
[2]. Andrew M.Smith,et.all,GPS Scintillation in the high artic associated with an auroral arc, Space weather, Vol,2008.
[3]. Fremouw E.,J.Akira Ishimaru,Scintillation Index and mean apparent radar cross section on monostatic and Bistatic paths,1998.
[4]. Beniguel,Global Ionospheric Scintillation Model Ver.5, IEAA,ITU,2004.
[5]. Bowman, G. G., Upper atmosphere neutral-particle density variations compared with spread-F occurrence rates at locations around the world, Ann. Geophysic, 10, 676-682, 1992.
[6]. Chandra, H., Som Sharma, M. A. Abdu and I. S. Batista, Spread-F at anomaly crest regions in the Indian and American longitudes, Adv. Space Res., 31, 3, 717-727,
[7]. Ionospheric Scintillation Monitor ,User Manual GISTM,Ver1.0,2006.
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
7
Unjuk Kerja Algoritma SAGE untuk Karakterisasi Statistik Parameter
Spasial dan Temporal Sinyal Lintasan Jamak
dengan Antena Array Kubus
Firdaus, P. Handayani,
G. Hendrantoro
Teknik Elektro - ITS
Kampus ITS Sukolilo - Surabaya 60111 Telp. 031 5947843 Fax. 031 5933228
[email protected] & [email protected]& [email protected]
ABSTRAK
Pada penelitian ini akan dilakukan karakterisasi parameter spasial dan temporal sinyal lintas jamak menggukan algoritma SAGE (Space-Alternate Generalizad Expectation-maximazitation). Pada makalah ini diberikan hasil awal dari penelitian berupa unjuk kerja algoritma SAGE dalam RMSE untuk estimasi DoA, DoD, delay dan amplitudo komplek berdasarkan simulasi menggunakan antena array kubus. Simulasi menunjukkan algoritma berkerja dengan baik untuk estimasi parameter-parameter tesebut sehingga memungkinkan diterapkan pada pengukuran untuk mendapatkan karakterisasi lintas jamak dalam gedung.
Kata Kunci : Algoritma SAGE, DoA, DoD, Delay, amplitudo komplek, antena array.
1. PENDAHULUAN
Perkembangan sistem komunikasi radio bergerak harus memenuhi peningkatan permintaan untuk kapasitas transmisi. Solusi yang potensial untuk hal tersebut adalah penggunaan sistem komunikasi
Multiple-Input Multiple-output (MIMO) yang
menggunakan antena array pada sisi kirim maupun sisi terima. Dimana dengan sistem ini meningkatkan troughput terutama pada lingkungan yang banyak terjadi hamburan.[1].
Mempertimbangkan kondisi stokastik dari kanal radio maka diperlukan model yang dapat digunakan untuk menggambarkan mekanisme propagasi yang akhirnya memungkinkan dilakakuan prediksi unjuk kerja dari pengembangan sistem wireless kedepan. Dalam permasalahan MIMO, model kanal dua arah dibutuhkan untuk memperkirakan parameter angular dan temporal dari masing-masing sinyal disisi kirim dan terima. Dengan demikian komponen lintas jamak harus diidentifikasi dan di analisa berdasarkan waktu kedatangan (time of arrival, ToA), arah kedatangan (Direction of Arrival,DoA) arah keberangkatan (Direction of Departure,DoD) serta amplitudo kompleks [1].
Ada beberapa metoda yang telah digunakan untuk estimasi sinyal. Pada penelitian ini digunakan algoritma SAGE yang memberikan hasil estimasi lebih baik dibanding algoritma konvensional MUSIC
(Multiple Signal Clasification) dan ESPRIT
(Estimation of Signal Parameters via Rotational Invariance Technique) yang memberikan kinerja yang jelek untuk sinyal yang berkorelasi [1].
Aplikasi algoritma SAGE telah banyak digunakan untuk permasalahan estimasi parameter kanal lintasan jamak. Seperti yang telah dilakukan Fleury dkk. pada [2] yang mempelajari lingkungan time invarian dan time variant. Versi SAGE domain frekuensi juga telah diusulkan oleh chong dkk. pada [3] menggunakan sistem SIMO (Single Output Multiple Output). Matthaiou dkk. mengembangkan peneltian dengan menerapkan algoritma SAGE sistem MIMO pada [1]. Tetapi antena yang digunakan masih berupa antena array linier dengan spasi sama (Uniform Linear Array), dimana dengan antena ini hanya memberikan informasi azimuth pada DoA dan DoD. Pada penelitian ini dikembangkan pada antena array kubus yang memunngkinkan didapat informasi azimuth dan
elevasi DoA dan DoD untuk mendapatkan
karakteristik statistik yang lebih lengkap untuk menggambarkan mekanisme propagasi.
Penelitian ini dibagi menjadi dua bagian yaitu simulasi estimasi parameter kanal menggunakan algoritma SAGE pada antena array kubus dan
pengukuran untuk mendapatkan karakterisasi
8 algoritma SAGE dengan simulasi mendekati kondisi riil sehingga memungkinkan digunakan pada data hasil pengukuran.
2. SINYALDANMODELKANAL
Model sistem komunikasi terdiri dari pemancar (Tx) dan penerima (Rx) yang memungkinkan propagasi sinyal dalam medan jauh. Untuk kondisi ini akan ada L lintasan propagasi yang terjadi pada sistem. Jika digunakan antena array pada pemancar dan penerima dimana pada pemancar terdiri dari N
elevasiDoA, azimuth DoA, Azimuth DoD, elevasi DoD dan amplitudo kompleks dari lintasan ke l.
Fungsi alih ruang-frekuensi yang berhubungan dengan (1) dengan transformasi fourier satu dimensi dikalikan dengan domain delay dituliskan sebagai berikut : ke l pada elemen array ke n dtuliskan sebagai berikut :
) memudahkan pemahaman disini seluruh parameter
disusun dalam satu vektor menjadi
. Dengan memisalkan ada
K sampel frekuensi, maka dapat dirumuskan fungsi alih yang tergangguan noise pada sampel frekuensi ke
k dengan 1 k K sebagai berikut : Steering vektor penerima dan pemancar, sedangkan
T adalah operasi transpose. N(k) adalah white noise
gaussian ruang.
3. ESTIMASIGAMBUNGANPARAMETER
KANALMENGGUKANANALGORITMA
FD-SAGE3D
Algoritma SAGE secara prinsip adalah
pengembangan dari algoritma EM yang menghitung ML (Maximum likelihood) estimator dari parameter yang tidak diketahui dengan cara berurutan. Penurunan dari algoritma berdasarkan pada complete data (tidak dapat diamati) dan incomplete data (dapata diamati). Pada masing-masing iterasi SAGE ini, hanya subset dari parameter yang di update sedangkan parameter yang lain bernilai tetap[1].
Pengembangan algoritma SAGE pada domain frekuensi (FD) mempunyai dua tujuan[2]. Pertama alat ukur yang digunakan merupakan alat ukur yang dapat menyimpan data dalam domain frekuensi kompleks . Oleh karena itu data juga diproses dalam domain frekuensi. Tujuan kedua adalah membantu dalam pemodelan dalam domain frekuensi.
Sebagaimana algoritma EM dan algoritma SAGE standar, FD-SAGE 3D berdasarkan pada dua langkah yaitu ekspectation step (E-step) dan maximization step
(M-step)[1][2]. Dua langkah ini diulangi sampai
konvergen tercapai. Dalam algoritma SAGE standar, selama E-step, data lengkap dari lintasan ke-l,
adalah data tidak lengkap. Prosedur memperbaharui
koordinat untuk mendapatkan parameter " dari
masing masing gelombang berdasarkan pada estimasi
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921 adalah fungsi cost yang diberikan oleh :
( , ) ( )( , )
dimana [.]H adalah hermitian transpose.
Proses pembaharuan ini merupakan proses interasi pertama dari algoritma 3D FD-SAGE. Estimasi parameter secara berurutan dan berulang di update sampai konvergensi tercapai. Amplitudo komplek kemudian dihitung sebagai normalisasi sinyal output oleh energi total. Sebagamana metoda iterasi yang lain, konvergensi algoritma ketika perbedaan dua estimator berurutan lebih kecil dari threshold yang didefenisikan.
4. SIMULASI
Simulasi dilakukan dengan software MATLAB dengan asumsi antena pemancar dan penerima adalah antena array dengan geometri kubus dengan jarak
antar elemen ½ . Geometri antena dapat dilihat pada
gambar 1. Steering vector berdasarkan gambar 1. dapat diturunkan berdasarkan persamaan 3.
Bandwidth 330 MHz dengan rentang frekuensi 2.17 -2.5 GHz. Sampling frekuensi 401 sampel.
Gambar 1. Geometri antena array
Unjuk kerja dari algoritma SAGE diukur dengan RMSE (root means square error). Pada simulasi ini pertama kali dihitung RMSE terhadap SNR menggunakan satu sinyal. Setiap parameter dipilih secara acak yaitu azimuth dari 0-360, elevasi 0-180, delay dari 0-800 ns.
Pada gambar 2-5 dapat dilihat RMSE dari azimuth DoA, Elevasi DoA, delay, azimuth DoD, elevasi DoD dan amplitudo komplek. Dari gambar 1 dan gambar 2 dapat dilihat bahwa RMSE berkurang dengan pertambahan SNR. RMSE cukup kecil untuk SNR diatas 15 dB. Untuk kebutuhan karakterisasi maka diusahakan pengukuran dengan level daya diatur sedemikan rupa untuk mendapatkan SNR diatas 15 dB.
Gambar 2. RMSE terhadap SNR untuk estimasi azimuth
dan elevasi DOA
Gambar 3. RMSE terhadap SNR untuk azimuth dan elevasi
DOD
RMSE Azimuth dan Elevasi DOA
R
RMSE Azimuth dan Elevasi DOD
10 Gambar 4. RMSE terhadap SNR dari estimasi delay
Gambar 5. RMSE terhadap SNR untuk estimasi amplitudo
komplek.
Dari gambar 4 dapat dilihat bahwa estimasi delay cukup kecil antara 0.7 – 0.84 ns berada dibawah resolusi delay 2.5 ns. Sedangkan RMSE amplitudo kompleks menurun dengan pertambahan SNR. Semakin kecil kesalahan aplitudo komplek maka semakin baik pemisahan lintasan yang berdaya cukup besar yang merupakan lintasan yang memberikan kontribusi cukup besar dipenerima.
Unjuk kerja berikutnya adalah RMSE terhadap variasi jumlah sinyal. Pada simulasi ini sinyal divariasikan dari 5 sampai 30 sinyal, kemudian dihitung RMSE total sinyal. Hasilnya dapat dilihat pada gambar 6 dan gambar 7. dimana semakin besar jumlah sinyal semakin besar RMSE estimasi sudut. Dari gambar 6 terlihat bahwa estimasi DoD lebih akurat dibanding estimasi DoA. Seadangkan estimasi delay rata-rata pada nilai 0.7 ns, dan estimasi
amplitudo komplek semakin turun terhadap
penambahan jumlah sinyal.
Gambar 6. RMSE terhadap Variasi Jumlah Sinyal
Gambar 7. RMSE Delay Magnitudo terhadap Variasi
Jumlah Sinyal
5. KESIMPULAN
Dari hasil simulasi dapat dilihat bahwa kinerja algoritma SAGE cukup baik untuk estimasi DoA, DoD, Delay dan amplitudo komplek. Hal ini bisa diamati dimana semua parameter menunjukkan RMSE minimum antara 15-30 dB. Sehingga pada mengukuran diusahakan mendapatkan nilai SNR berada diantara 15-30 dB.
DAFTARREFERENSI
[1] M. Matthaiou, D. I. Lourenson, N. R. Ghods, S.
Salous,”Characterization of an indoor MIMO
channel in Frequency Domain using the 3d-SAGE Algorithm”
[2] B. H. Fleury, M. Tschudin, R.
Heddergott,“Channel Parameter Estimation in
Mobile Radio Enviroments Using SAGE Algoritm,” IEEE Journal on selected area in
RMSE vs Variasi Jumlah Sinyal
Elevasi DoA
RMSE Delay vs Variasi Jumlah Sinyal
Jumlah Sinyal
RMSE Magnitudo Lintasan vs Variasi Jumlah Sinyal
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
11 communications, Vol. 17, No. 3, pp.434-450. Maret 1999.
[3] C. C. Chong, C. M. Tan, D. I. Laurenson. S.
McLaughlin”A New Statistical Wideband Spatio
Temporal Channel Model for 5-GHz Band WLAN System”, IEEE Journal on selected area in
12
Estimasi Arah Kedatangan Sinyal (DOA) Dengan Menggunakan Algoritma
MUSIC Pada Antena Array Kubus
Muhammad Syahroni
, Puji Handayani
, Gamantyo Hendrantoro
Teknik Elektro, Institut Teknologi Sepuluh Nopember, Surabaya [email protected], [email protected], [email protected]
ABSTRAK
Teknologi antena array adaptif berguna untuk mendeteksi arah kedatangan sinyal (Direction of Arrival – DOA) bagi komunikasi bergerak, dimana beam antena secara otomatis akan diarahkan pada lokasi dimana sinyal datang berasal. Salah satu metode untuk mengestimasi DOA secara efektif adalah dengan menggunakan algoritma MUSIC (Multiple Signal Clasiffication). Pada makalah ini akan dibahas penerapan algoritma MUSIC pada antena array kubus guna mengestimasi DOA dari berbagai arah sudut elevasi dan azimut. Ketika sinyal datang pada antena, sinyal akan disusun dalam matrik kovariannya, kemudian dilakukan proses dekomposisi eigenvalue guna menghasilkan sinyal subspace dan noise subspace. Kemudian DOA sinyal akan diestimasi berdasarkan pada property orthogonal dari noise subspace sinyal datang dan steering vector antena array kubus. Hasil simulasi menunjukkan bahwa sinyal akan dapat dideteksi dengan akurat (dengan error deteksi yang kecil) ketika sinyal berasal dari berbagai sudut elevasi dan azimut dimana error elevasi tertinggi adalah 0.315o dan error azimut adalah 0.325o. Resolusi sudut akan meningkat bersesuaian dengan meningkatnya SNR dan jumlah sinyal maksimum yang dapat dideteksi secara bersamaan adalah enam sinyal.
Kata Kunci: Arah kedatangan sinyal, DOA, Algoritma MUSIC, Antena Array Kubus
1.PENDAHULUAN
Teknologi antena array adaptif berguna untuk mendeteksi arah sinyal dan untuk mengatasi fading bagi komunikasi bergerak. Agar antenna array adaptif dapat bekerja dengan baik, maka arah kedatangan sinyal (Direction of Arrival – DOA) harus dapat diestimasi dengan tepat. Hal ini akan dapat dicapai dengan menggunakan desain antena yang baik dan mengembangkan algoritma antena array adaptif yang tepat [1]
Algoritma MUSIC (Multiple Signal Classification) dikenal sebagai salah satu algoritma terbaik untuk mengestimasi sudut arah kedatangan sinyal. Algoritma MUSIC melakukan proses dekomposisi eigenvalue dari suatu matriks covariance guna menghasilkan eigenvector dari sinyal subspace dan noise subspace. Kemudian arah sinyal akan diestimasi berdasarkan pada property orthogonal dari noise subspace dan steering vector [2]. Keuntungan utamanya adalah diperolehnya suatu sudut resolusi yang baik sehingga algoritma MUSIC dapat membedakan dua sinyal datang yang berdekatan.
Tetapi algoritma yang dilakukan selama ini hanya menggunakan antena array linear dan array plannar. Hal ini akan menghasilkan deteksi sudut yang bagus hanya ketika sinyal jamak (multipath signal) berasal dari elevasi (ketinggian) yang rendah. Ketika sinyal datang dari sudut elevasi yang tinggi, maka error deteksi akan menjadi besar [3]. Sebaliknya suatu
antenna array kubus akan dapat menghasilkan suatu deteksi yang bagus ketika sinyal datang dari berbagai sudut elevasi, disebabkan oleh struktur antena nya yang berupa kubus.
Pada makalah ini akan dilaporkan penerapan algoritma MUSIC pada antena array kubus. Analisa akan dilakukan terhadap kualitas sinyal (signal to noise ratio – SNR), resolusi DOA dan jumlah sinyal yang dapat dideteksi.
2. MODEL SINYAL DAN ANTENA
Sinyal yang sampai pada antenna array M elemen adalah berupa kombinasi linear dari jumlah D sinyal datang dan noise n(t). Sinyal yang diterima pada antena dapat dinyatakan oleh:
D 1o l
n(t)
)s(t)
a(
θ(
n(t)
As(t)
u(t)
(1)Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
13 merupakan fungsi dari sinyal datang s(t), baik dari arah
azimuth
atau elevasi
, dan dapat dinyatakan oleh:vektor arah (direction vector) yang dinyatakan oleh:
Gambar 1: Antena array kubus
3. ALGORITMA MUSIC
Algoritma MUSIC ini pertama sekali diusulkan oleh Schmidt [2] dan bekerja berdasarkan pada pemanfaatan dari eigenstruktur dari sinyal datang. Algortima MUSIC bekerja berdasarkan asumsi bahwa noise pada setiap kanal adalah tidak berkorelasi.
Pada Algoritma MUSIC, terlebih dahulu perlu diketahui jumlah sinyal yang datang pada antena penerima. Bila jumlah sinyal adalah D, maka noise eigenvalue dan eigenvector adalah M – D (dimana M adalah jumlah elemen antena). Karena MUSIC bekerja berdasarkan subspace dari noise eigenvector, maka algoritma ini disebut sebagai metode subspace.
Matrik kovarian Ruu dapat diperoleh dengan
mengasumsikan noise tidak berkorelasi dengan varians yang sama, yaitu
R
uu
E
[
uu
H]
AE
[
ss
H]
A
H
E
[
nn
H]
(4)
R
uu
AR
ssA
H
n2I
(5)
Dengan Rss adalah matrik korelasi sinyal E[ssH]. Biasanya matrik kovarian dari sinyal yang diterima tidak tersedia, oleh karena itu sebagai gantinya pada penerapan algoritma MUSIC digunakan sample dari matrik kovarian berikut.
Berikutnya dilakukan proses dekomposisi guna
memperoleh nilai eigenvalue dan eigenvector bagi Ruu
yaitu:
R
uuv
v
Λ
(7)Dimanadiag{0,1,,M1},01M1
yang merupakan nilai eigenvalue dan
] q q [q
v 0 1 M1 adalah nilai eigenvektor yang
bersesuaian dengan Ruu.Eigenvektor dari matrik
kovarian Ruu terdiri dari dua subspace yang saling
tegak lurus (orthogonal) yaitu signal subspace Vs dan noise subspace Vn. Noise subspace Vn dapat diperoleh dengan membentuk matrik berikut:
v
n
[
q
Dq
D1
q
M1]
(8) Nilai eigenvector dari noise subspace Vn adalahorthogonal terhadap array steering vector A pada sudut datang
1,
2,
,
D. Nilai dari spektrum algoritmaMUSIC
P
MUSIC dapat diperoleh sebagai berikut:)
hasil simulasi untuk mengevaluasi kinerja algoritma MUSIC pada antenna array kubus. Diasumsikan setiap elemen antena mempunyai gain yang sama dan dipisahkan sejauh setengah panjang gelombang.A. Akurasi estimasi DOA sebagai fungsi SNR
Pada bagian ini dilakukan analisa terhadap akurasi estimasi suatu arah sinyal kedatangan (DOA) sebagai fungsi dari SNR. Estimasi DOA dilakukan dengan menggunakan satu sinyal, dimana sinyal dibangkitkan dan sampai pada antena dari arah yang acak (DOA
sinyal datang bervariasi dari 0o - 360o untuk azimut dan
0o – 180o untuk elevasi). SNR sinyal dibuat bervariasi
dari 0 dB sampai 30 dB dan untuk setiap nilai SNR, simulasi dilakukan sebanyak 10 kali. Hasil estimasi DOA dan DOA sebenarnya yang sampai di antena akan dibandingkan agar diketahui error yang terjadi.
Pada gambar 2 dapat dilihat bahwa RMS Error (Root Mean Square Error) akan semakin kecil bila nilai SNR meningkat. Hal ini terjadi karena semakin bagus kualitas sinyal yang diterima (SNR), maka semakin akurat hasil estimasi sinyal datang. Nilai RMS Error tertinggi terjadi ketika nilai SNR adalah 0 dB, dimana
untuk RMS Error azimut diperoleh nilai 0,325o dan
RMS Error elevasi diperoleh 0.315o. Pada estimasi
sudut azimut, nilai RMS Error akan menjadi nol pada
14
B. Resolusi sudut kedatangan (DOA)
Analisa resolusi DOA dilakukan guna mengetahui seberapa rapat jarak antara dua sinyal datang dapat dideteksi oleh antena. Analisa dilakukan dengan membangkitkan dua sinyal acak (DOA sinyal yang dibangkitkan adalah acak) dengan tetap menjaga agar selisih kedua sudut sinyal tersebut memiliki besar sudut yang tetap. Kemudian selisih sudut datang kedua sinyal tersebut akan diukur dan dibandingkan dengan hasil estimasi DOA nya sehingga dapat diperoleh nilai RMS error nya. Pengujian dilakukan masing-masing pada SNR sebesar 10 dB, 20 dB dan 30 dB.
Hasil simulasi secara umum menunjukkan bahwa semakin tinggi SNR akan diperoleh deteksi resolusi sudut yang lebih baik. Pada SNR = 10 dB (gambar 3), resolusi sudut terkecil yang dapat dideteksi adalah 7o, pada SNR = 20 dB (gambar 4), resolusi sudut yang dapat dideteksi menjadi lebih baik yaitu sebesar 3o. Sedangkan pada SNR = 30 dB, resolusi sudut sebesar
1o sudah dapat dideteksi (dengan RMSE adalah 0o)
Dapat diamati pula bahwa untuk nilai SNR yang sama, maka pada resolusi DOA dengan selisih sudut yang besar, akan diperoleh RMS Error yang lebih kecil. Pada gambar 3 dapat dilihat bahwa pada SNR = 10 dB, pada selisih sudut elevasi sebesar 7o diperoleh
RMS Error sebesar 3.5o, sedangkan pada selisih sudut
elevasi sebesar 8o, RMS Error yang diperoleh adalah
lebih kecil menjadi 0.375o.
Kualitas dari resolusi sudut bergantung dari SNR sinyal datang. Ketika SNR sinyal rendah, maka algoritma MUSIC tidak dapat memisahkan dua sinyal datang yang berdekatan, disebabkan puncak spektrum daya yang dihasilkan landai. Ketika SNR semakin meningkat, maka puncak spektrum daya sinyal akan semakin tajam, sehingga semakin presisi algoritma
MUSIC mendeteksi sinyal-sinyal yang saling
berdekatan. Hal ini dapat amati ketika antena algoritma MUSIC tidak dapat memisahkan kedua sinyal tersebut, sehingga hanya menghasilkan satu spektrum sinyal yang landai. Ketika SNR naik menjadi 20 dB, algoritma MUSIC dapat menghasilkan dua spektrum sinyal yang tajam dan dapat mengestimasi DOA sinyal dengan tepat sebagaimana ditunjukkan pada gambar 6.
C. Jumlah sinyal sebagai fungsi SNR
Pada bagian ini akan dilihat hubungan antara jumlah sinyal yang dapat dideteksi dengan SNR sinyal. Dari hasil simulasi, pada gambar 7 dapat diamati bahwa jumlah sinyal yang dapat dideteksi secara akurat akan meningkat seiring dengan meningkatnya nilai SNR. Jumlah sinyal minimum yang terdeteksi adalah 1 sinyal, terjadi ketika nilai SNR = 0 dB. Jumlah sinyal maksimum yang dapat dideteksi adalah
6 sinyal, terjadi ketika nilai SNR
28 dB. Hal ini memenuhi ketentuan dari algoritma MUSIC dimana jumlah sinyal maksimum yang dapat dideteksi tidak akan melebihi jumlah elemen antena.5. KESIMPULAN
Pada makalah ini dilakukan analisa terhadap kinerja antenna array kubus dengan menggunakan algoritma MUSIC. Hasil simulasi menunjukkan bahwa sinyal akan dapat dideteksi dengan akurat (dengan error deteksi yang kecil) ketika sinyal berasal dari berbagai sudut elevasi dan azimut. Error elevasi
tertinggi adalah 0.315o dan error azimut adalah 0.325o,
terjadi ketika sinyal datang pada antena dengan SNR sebesar 0 dB. Error deteksi sudut elevasi akan menjadi
nol ketika nilai SNR
12 dB dan error deteksi sudutazimut akan menjadi nol ketika SNR
10 dB.Jumlah sinyal datang maksimum yang dapat dideteksi adalah sebanyak enam sinyal sehingga memenuhi ketentuan dari algoritma MUSIC dimana jumlah sinyal maksimum yang dapat dideteksi tidak dapat melebihi
jumlah elemen antena.
Kualitas dari resolusi sudut bergantung dari SNR sinyal datang. Ketika SNR sinyal rendah, maka algoritma MUSIC tidak dapat memisahkan dua sinyal datang yang berdekatan, disebabkan puncak spektrum daya yang dihasilkan landai. Ketika SNR semakin meningkat, maka puncak spektrum daya sinyal akan semakin tajam, sehingga semakin presisi algoritma
MUSIC mendeteksi sinyal-sinyal yang saling
berdekatan.
Gambar 2. Hubungan antara RMS Error dengan SNR
Pr osiding Semi nar Radar Nasional 2010., Yogyakart a, 28-29 Apr il 2010., ISSN : 1979-2921
15 Gambar 3. Hubungan RMS Error dengan Resolusi DOA
pada SNR = 10 dB
Gambar 4. Hubungan RMS Error dengan Resolusi DOA
pada SNR = 20 dB
Gambar 5. Spektrum estimasi DOA dari sinyal A
=50o ,
=200o dan sinyal B
=55o ,
=205o pada SNR = 10 dBGambar 6. Spektrum estimasi DOA dari sinyal A
=50o ,
=200o dan sinyal B
=55o ,
=205o pada SNR = 20 dBGambar 7. Hubungan SNR dengan jumlah sinyal yang
dapat dideteksi
DAFTAR REFERENSI
[1] A. Pholyan, “ Joint Estimation of Propagation
Delay and Direction of Arrival of Multipath Signal”, 0-7803-7757-5/03 , IEEE 2003
[2] R.O. Schmidt, “ Multiple Emitter Locatin and
Signal Parameter Estimation”, IEEE transaction and propagation, vol AP-34, No 3, March 1986
[3] J.D Lin, “ Joint Spatial-Temporal Channel
Parameter Channel Parameter Estimation Using Tree-structured MUSIC” 0-7803-7484-3/02 IEEE
[4] Y.Y. Wang, “TST-Music for joint DOA-Delay
Estimation” in IEEE transaction on signal processing, vol 49, no 4, april 2001.
[5] J. Verhaevert, “ Direction of arrival (DOA)
16
Pengukuran Model Propagasi Outdoor dan Indoor Sistem WiMAX 2.3GHz
di Lingkungan Kampus ITB
Arsyad Ramadhan Darlis, Trasma Yunita, Joko Suryana
Program Master Sekolah Teknik Elektro dan Informasi – ITB Gedung Achmad Bakrie, Labtek VIII Lantai 2 Jl. Ganesha No.10 Bandung 40132, Indonesia Telepon : +62-22-2502260. Fax : +62-22-2534222
[email protected], [email protected], [email protected]
ABSTRAK
Dewasa ini teknologi di bidang telekomunikasi telah mengalami perkembangan yang sangat pesat. Hal ini ditandai dengan banyaknya produk dan teknologi yang dikembangkan di bidang ini oleh beberapa negara, salah satu diantaranya adalah WiMAX (Worldwide Interoperability for Microwave Access). Sama halnya seperti teknologi nirkawat yang dikembangkan sebelumnya, teknologi ini juga tidak dapat dipisahkan dengan faktor redaman (loss) sehingga terdapat berbagai model perhitungan redaman propagasi, seperti model propagasi SUI (Standford University Interim). Model propagasi ini dibuat karena kondisi geografis dari setiap negara yang berbeda – beda. Dalam penelitian ini dilakukan pengukuran model propagasi dengan menggunakan frekuensi 2.3GHz, yang dipakai pada teknologi WiMAX. Pengukuran ini terdiri dari pengukuran outdoor dan indoor di lingkungan kampus Institut Teknologi Bandung (ITB). Penelitian ini merupakan kajian awal bagi perkembangan WiMAX di Indonesia umumnya dan ITB khususnya. Pengukuran menggunakan perangkat network analyzer
2.3GHz dan antena monopole λ/4 di sisi pengirim serta spectrum analyzer dan antena monopole λ/4 di sisi
penerima. Data pathloss hasil pengukuran dibandingkan dengan perhitungan pathloss model propagasi SUI (Standford University Interim) dan diharapkan dapat menjadi acuan bagi berbagai pihak terkait dan dapat diolah lebih lanjut untuk penelitian berikutnya.
Kata Kunci: WiMAX 2.3GHz, pathloss, propagasi
1. PENDAHULUAN
Teknologi jaringan tanpa kabel yang awalnya hanya digunakan pada daerah-daerah yang tidak terjangkau kabel kini dapat bersaing dengan teknologi kabel. Teknologi ini terus dikembangkan hingga muncul broadband wireless access (BWA) yang menjanjikan koneksi dengan data rate tinggi dengan menggunakan gelombang radio untuk mengirim dan menerima data secara langsung dari dan ke pengguna dimana saja mereka membutuhkan. BWA adalah sistem point-to-multipoint yang terdiri dari base
station dan subscriber equipment. Broadband wireless
mampu bersaing atau saling mengisi dengan wireline
broadband tergantung dari kasus bisnis dan target
pasar.
Perkembangan teknologi untuk bekerja pada kondisi Non Line of Sight (NLOS) pun turut berkembang. Oleh karena itu, hadirlah WiMAX (Worldwide Interoperability for Microwave Access) yang merupakan suatu jaringan BWA standar IEEE
802.16 dengan jarak jangkau yang mampu mencapai 50 km (tergantung dari frekuensi yang digunakan) dan menangani kecepatan data sampai 75Mbps. Teknologi ini dapat bekerja pada kondisi Line of Sight (LOS) dan Non Line of Sight (NLOS).
Gambar 1.1. Teknologi jaringan nirkawat
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
17
membuat sebuah solusi dalam bentuk persamaan untuk menghitung seberapa besar nilai redaman yang diperoleh berdasarkan kondisi geografis suatu daerah. Model propagasi yang sering digunakan untuk WiMAX adalah SUI.
Dan penelitian ini merupakan tahap awal dari pemodelan kanal propagasi WiMAX di Indonesia. Karena jika hanya menggunakan SUI yang memiliki tiga tipe daerah, sepertinya tidak dapat mencakup berbagai daerah di Indonesia. Untuk itu perlu dilakukan penelitian khusus untuk membuat sebuah model kanal Indonesia.
2. TEORI
2.1 Alokasi Frekuensi Teknologi WiMAX di
Indonesia
Saat ini terdapat dua kategori spektrum frekuensi, yaitu licensed dan unlicensed. Untuk pemakaian spektrum frekuensi yang dikategorikan licensed, kompetitor harus membeli alokasi spektrum yang akan
mereka pakai.Penggunaan alokasi frekuensi licensed
memiliki keuntungan yaitu akan terlindungi dari pengaruh interferensi. Sedangkan pada spektrum
unlicensed, kompetitor tidak perlu membeli lisensi
alokasi frekuensi yang akan digunakan, namun kemungkinan untuk terjadinya interferensi akan sangat
tinggi. Unlisenced spectrum untuk WiMAX
direkomendasikan oleh WiMAX Forum pada 2.4 GHz dan 5.8 GHz.
Alokasi frekuensi yang direkomendasikan oleh WiMAX Forum dan sesuai dengan alokasi frekuensi
yang dikeluarkan oleh DITJEN POSTEL,
DEPKOMINFO, november 2006 untuk wilayah Indonesia, diantaranya: Pengelolaan Spektrum Frekuensi Radio Kementerian Kominfo telah menjamin pita frekuensi radio 2360 - 2390 MHz akan steril dan siap digunakan untuk ujicoba perangkat WiMAX.
2.2 Kondisi Non Line of Sight (NLOS)
Sinyal yang dikirimkan pada kondisi NLOS (dapat dilihat pada gambar 2.1) akan sampai pada
penerima melalui pemantulan (reflections),
pemencaran (scattering), dan pembiasan
(diffractions). Sinyal yang akan diterima merupakan gabungan dari direct path, multiple reflected paths,
scattered energy, dan diffracted propagation paths.
Kondisi multipath ini akan memberikan perbedaan
polarisasi, redaman, delay pancaran, dan
ketidakstabilan dibandingkan dengan sinyal yang diterima secara langsung melalui direct path.
Teknologi NLOS memungkinkan teknologi
WiMAX untuk menggunakan indoor Customer
Premise Equipment (CPE). Terdapat dua jenis
tantangan yang dihadapi indoor CPE, yaitu:
a. menanggulangi penetration losses yang
diakibatkan oleh bangunan-bangunan, dan
b. meng-cover jarak yang layak dengan daya kirim
dan gain antena yang rendah.
2.3 Antena Monopole λ/4
Salah satu bagian penting dari suatu stasiun radio adalah antena, ia adalah sebatang logam yang berfungsi menerima getaran listrik dari transmitter dan memancarkannya sebagai gelombang radio.
Gambar 2.1 Propagasi NLOS [2]
Ia berfungsi pula sebaliknya ialah menampung gelombang radio dan meneruskan gelombang listrik ke receiver.
Kuat tidaknya pancaran kita yang sampai di pesawat lawan bicara, sebaliknya baik buruknya penerimaan kita tergantung dari beberapa faktor. Faktor pertama adalah kondisi propagasi, faktor kedua
adalah posisi stasiun (posisi antena) beserta
lingkungannya, faktor ketiga adalah kesempurnaan antena. Untuk pancaran ada faktor ke-empat ialah kelebaran bandwidth pancaran kita dan faktor kelima adalah power.
Sebatang logam yang panjangnya 1⁄4 Lambda (λ)
akan beresonansi dengan baik bila ada gelombang radio yang menyentuh permukaannya. Jadi bila pada ujung coax bagian inner kita sambung dengan logam
sepanjang 1⁄4 λ dan outer-nya di ground, ia akan
menjadi antena. Antena semacam ini hanya
mempunyai satu pole dan disebut monopole (mono artinya satu).
18
dapat menggunakan pendekatan berikut:RSL = Ptx + Gtx + Grx – Ltot...(2.2)
Untuk gain antena monopole λ/4, digunakan nilai yang telah ada yaitu sebesar 5.2 dBi (directivity = 3.28)[krauss]. Nilai tersebut didapat dari perhitungan sebagai berikut: maka gain akan bernilai sama dengan direktivitas. Sehingga diperoleh gain monopole λ/4 = 5.16 ≈ 5.2
2.4 Model Propagasi Stanford University Interim
(SUI)
Stanford University Interim (SUI) model diperoleh dari percobaan AT&T wireless service pada sejumlah area di United States. Model ini menyertakan perhitungan path loss yang dipengaruhi oleh faktor jarak antara transmitter dan receiver, ketinggian antena, frekuensi carrier, dan terrain
type. Ilustrasi perangkat model tersebut dapat dilihat
dari gambar 2.2 berikut.
Gambar 2.2 Transmisi pada kondisi LOS dan
NLOS SUI [2]
Dalam aplikasinya model ini dibagi menjadi tiga kategori, yaitu:
a. Kategori A - Hilly/moderate to heavy tree
density
b. Kategori B - Hilly/light tree density or flat /
moderate-to-heavy tree density
c. Kategori C - Flat/light tree density
Kategori terrain yang sederhana di atas dapat memperhitungkan path loss dari RF channel pada kondisi NLOS. Model ini diperuntukkan untuk mentaksir nilai path loss sebelum perencanaan sebenarnya dimulai.
Persamaan model SUI adalah:
X X s
1. LP = Path loss dari antena pengirim ke penerima
untuk kondisi NLOS. lihat pada tabel 2.7
d0 : referensi jarak(ditetapkan sebesar 100m)
d : jarak udara dari BS ke SS (m)
4. Faktor koreksi frekuensi
Pr osidi ng Semi nar Radar Nasi onal 2010., Yogyakart a, 28-29 Apr il 2010., I SSN : 1979-2921
19
Tabel 2.2 Tipe Terrain model SUI
Model
3. HASIL DAN PEMBAHASAN
3.1 Persiapan Pengukuran
Sebelum melakukan pengukuran, diperlukan peralatan yang harus dipersiapkan, yaitu :
1. Antena Monopole λ/4.
2. Kabel simirigid (2m) yang telah terpasang
connector SMA (male) pada kedua ujungnya.
3. Spectrum Analyzer dengan frekuensi maksimum
8 GHz.
4. Network Analyzer sebagai pembangkit frekuensi
2,3GHz dengan daya pancar 10 dBm.
3.2 Prosedur Pengukuran
Gambar di bawah ini menunjukan blok diagram pengukuran yang digunakan baik pada kondisi
Outdoor maupun Indoor.
Gambar 3.1 Blok diagram pengukuran
Pada penelitian ini, jarak antara transmitter dan
receiver tidak terlalu jauh karena keterbatasan daya
pancar dari pemancar. Dan antena pemancar yang digunakan adalah antena omnidireksional, monopole
λ/4. Sehingga, untuk membandingkan data hasil
pengukuran dengan perhitungan propagasi SUI tidak dapat dilakukan secara langsung. Akan tetapi, diperlukan faktor koreksi pathloss data pengukuran terhadap jarak agar relevan dengan standar SUI, yaitu > d0 (d0 = 100 meter).
Adapun site yang digunakan pada pengukuran ini terlihat pada gambar 3.2.
Gambar 3.2 Site pengukuran di lingkungan ITB
Setelah melakukan pengukuran berdasarkan blok diagram diatas, maka didapat hasil sebagai berikut :
Tabel 3.1 Level daya terima pada pengukuran outdoor
Akan tetapi, karena keterbatasan waktu pengukuran maka pengukuran belum dilakukan secara sempurna, dimana seharusnya dilakukan pengukuran level daya terima pada jarak yang sama tetapi berbeda koordinat/derajat dari pemancar. Hal ini bertujuan untuk memperoleh nilai daya terima yang dapat mewakili berbagai titik di sekitar site.
Sedangkan pada penelitian ini baru dilakukan pengukuran untuk mengambil sejumlah sampel (10 data) pada jarak/titik yang sama di area site, meskipun dilakukan di dua kondisi berbeda yaitu outdoor dan
indoor.
Jarak (m) 12.6 12.7 24.34 26.3
-67.69 -78.17 -79.47 -80.53
ket. LOS shadowing LOS blocking