MODEL OTOMATISASI KANDANG TERNAK MENGGUNAKAN LOGIKA FUZZY MODEL OTOMATISASI KANDANG TERNAK MENGGUNAKAN LOGIKA FUZZY
(Studi Kasus : Anak Ayam Broiler ) (Studi Kasus : Anak Ayam Broiler ) Rendi Aditia,
Rendi Aditia,Tjut.Awaliyah ZuraiyahTjut.Awaliyah Zuraiyah11,, Agung Prajuhana PutraAgung Prajuhana Putra22.. Program Studi Ilmu K
Program Studi Ilmu Komputer - omputer - FMIPA UniversFMIPA Universitas Pakuanitas Pakuan Jl.Pakuan PO BOX 452, Bogor
Jl.Pakuan PO BOX 452, Bogor Telp/Fax (0251) 8375 547 Telp/Fax (0251) 8375 547 Email:
Email: [email protected]@gmail.com
ABSTRAK
ABSTRAK
Peternakan ayam pedaging butuh pemeliharaan yang lebih baik dan kontinyu untuk menghasilkan Peternakan ayam pedaging butuh pemeliharaan yang lebih baik dan kontinyu untuk menghasilkan ayam
ayam pedaging pedaging dengan dengan kualitas kualitas yang yang baik baik . Para . Para peternak peternak ayam ayam pedaging pedaging masih masih menggunakan menggunakan caracara manual dalam pemberian pak
manual dalam pemberian pakan an dan menjaga suhu optidan menjaga suhu optimal kandang . rutinitas tersmal kandang . rutinitas tersebut menyebabkanebut menyebabkan suatu
suatu masalah masalah yaitu yaitu kelupaan kelupaan peternak peternak dalam dalam menjaga menjaga suhu suhu kandang kandang dan dan pemberian pemberian pakan pakan terhadapterhadap ternaknya. Model otomatisasi kandang ternak menggunakan
ternaknya. Model otomatisasi kandang ternak menggunakan logika fuzzy mamdanilogika fuzzy mamdani. dengan. dengan m
menenggggununakakaan n software software arduino ide arduino ide , matlab. , matlab. alat alat yang yang di gdi gunakan pada unakan pada sistem sistem ini yini yaitu 1 aitu 1 arduino arduino unouno r3, relay rangkaian dimmer , lcd 16x2 , 2 servo , humi
r3, relay rangkaian dimmer , lcd 16x2 , 2 servo , humidifier, difier, fan , lampu pijar 100w,ufan , lampu pijar 100w,ultrasonic dan ltrasonic dan buzzerbuzzer sistem pemanas berjalan berdasarkan 1 inputan dari
sistem pemanas berjalan berdasarkan 1 inputan dari DHT11 DHT11 yang berfungsi membaca suhu danyang berfungsi membaca suhu dan kelembaban pada kandang . logika fuzzy digunakan sebagai penentu tingkat intensitas cahaya pada kelembaban pada kandang . logika fuzzy digunakan sebagai penentu tingkat intensitas cahaya pada kandang . Untuk sistem pemberian pakan menggunakan 2
kandang . Untuk sistem pemberian pakan menggunakan 2 input yaitu melalui ultrasonic yang sudah di setinput yaitu melalui ultrasonic yang sudah di set berdasarkan
berdasarkan waktu waktu pada pada lcd lcd yang yang terkoneksi terkoneksi dengan dengan RTC RTC . . Ultrasonic Ultrasonic sebagai sebagai pembaca pembaca stock stock pakanpakan ketika terisi dan ketika pakan kosong dan servo berfungsi sebagai penahan pintu , untuk tempat stock ketika terisi dan ketika pakan kosong dan servo berfungsi sebagai penahan pintu , untuk tempat stock pakan buzzer akan berbunyi ketika ultrasonic membaca
pakan buzzer akan berbunyi ketika ultrasonic membaca stock pakan kosong . stock pakan kosong . Hasil dari model sistem Hasil dari model sistem iniini adalah mampu mempertahankan keseimbangan suhu mulai dari 31
adalah mampu mempertahankan keseimbangan suhu mulai dari 31 – – 33 c suhu 33 c suhu tersebut sudah sesuai olehtersebut sudah sesuai oleh standar suhu yang di butuhkan oleh anak ayam broiler , untuk tempat makan ketika ultrasonic membaca standar suhu yang di butuhkan oleh anak ayam broiler , untuk tempat makan ketika ultrasonic membaca tempat pakan kosong berjarak >8cm maka pintu servo akan membuka pada detik ke 5, jika jarak <6cm tempat pakan kosong berjarak >8cm maka pintu servo akan membuka pada detik ke 5, jika jarak <6cm maka pakan di anggap penuh pintu tidak akan terbuka.
maka pakan di anggap penuh pintu tidak akan terbuka. Kata Kunci :
Kata Kunci : Ayam Broiler , Logika Fuzzy , Pakan , S Ayam Broiler , Logika Fuzzy , Pakan , Suhuuhu PENDAHULUAN
PENDAHULUAN 1.1
1.1 Latar BelakangLatar Belakang
Bagi usaha peternakan ayam pedaging, Bagi usaha peternakan ayam pedaging, diperlukan pemeliharaan yang lebih baik dan diperlukan pemeliharaan yang lebih baik dan kontinyu untuk menghasilkan ayam pedaging kontinyu untuk menghasilkan ayam pedaging dengan
dengan kualitas kualitas yang yang baik. baik. Kebanyakan Kebanyakan parapara peternak
peternak ayam ayam pedaging pedaging masih masih menggunakanmenggunakan cara manual dalam memberi pakan ayam dan cara manual dalam memberi pakan ayam dan menjaga suhu optimal kandang ayam. Dengan menjaga suhu optimal kandang ayam. Dengan adanya rutinitas peternak tersebut, maka timbul adanya rutinitas peternak tersebut, maka timbul suatu masalah, yaitu kelupaan peternak (human suatu masalah, yaitu kelupaan peternak (human error)
error) dalam dalam menjaga menjaga suhu suhu kandang kandang ayamayam ,dan
,dan juga juga teledor teledor dalam dalam memberi memberi pakanpakan terhadap ternaknya
terhadap ternaknya
Selama ini, operator kandang hanya Selama ini, operator kandang hanya fokus pada pengukuran suhu melalui alat ukur fokus pada pengukuran suhu melalui alat ukur thermometer. Artinya peternak hanya thermometer. Artinya peternak hanya mendapatkan
mendapatkan data suhdata suhu. u. Peternak tPeternak tidak idak pernahpernah mengukur kelembaban udara padahal mengukur kelembaban udara padahal kelembaban udara akan mempengaruhi suhu kelembaban udara akan mempengaruhi suhu yang dirasakan ayam. Dan juga selama ini yang dirasakan ayam. Dan juga selama ini peternak
peternak memberi memberi pakan pakan ayam ayam dengandengan mengandalkan cara manual saja , bila suatu saat mengandalkan cara manual saja , bila suatu saat
peternak
peternak meninggalkan meninggalkan peternakan peternakan karena karena adaada keperluan mendadak akan merasa khawatir keperluan mendadak akan merasa khawatir karena tidak ada yang memberi makan hewan karena tidak ada yang memberi makan hewan ternaknya ,setelah penulis membaca tulisan ini ternaknya ,setelah penulis membaca tulisan ini penulis
penulis bergagasan bergagasan harus harus memiliki memiliki alat alat pengaturpengatur suhu sekaligus pengukur kelembaban dan udara suhu sekaligus pengukur kelembaban dan udara untuk menetapkan suhu nyaman yang dibutuhkan untuk menetapkan suhu nyaman yang dibutuhkan ayam dan juga alat untuk dapat mengatur pakan ayam dan juga alat untuk dapat mengatur pakan ayam setiap hari.Dengan penambahan teknologi ayam setiap hari.Dengan penambahan teknologi berupa
berupa lampu lampu dimmer dimmer ini ini mampu mampu memberikanmemberikan Suhu yang cukup untuk bagi Ayam Broiler Suhu yang cukup untuk bagi Ayam Broiler dengan Mengatur intensitas cahayanya, lalu dengan Mengatur intensitas cahayanya, lalu dengan Menggunakan Teknologi Pakan dengan Menggunakan Teknologi Pakan Menggunakan Sensor UltraSonic Para Peternak Menggunakan Sensor UltraSonic Para Peternak Dapat Mengatahui Keadaan Isi pakan Ketika Dapat Mengatahui Keadaan Isi pakan Ketika Persediaan Pakan Mulai Habis .
Persediaan Pakan Mulai Habis .
Pada Penelitian Sebelumnya “Puput Dani Pada Penelitian Sebelumnya “Puput Dani Prasetyo Adi (2012)” membuat sistem pemonitor Prasetyo Adi (2012)” membuat sistem pemonitor suhu dan kelembaban yang akan ditampilkan suhu dan kelembaban yang akan ditampilkan pada
pada layar layar LCD, LCD, sistem sistem ini ini menggunakanmenggunakan Mikrokontroller Arduino Bila Suhu dan Mikrokontroller Arduino Bila Suhu dan kelembaban menunjukkan suhu yang tinggi atau kelembaban menunjukkan suhu yang tinggi atau panas, maka akan dilakukan tindakan khusus dari panas, maka akan dilakukan tindakan khusus dari
bagian rumah sakit dengan menurunkan suhu ruangan (dalam derajat celcius) pada Air Conditioner (AC) “Arief Goeritno (2014) Membuat sensor SHT11 untuk pengkondisian suhu dan kelembaban relatif berbantuan mikrokontroler Pengukuran kinerja sistem didasarkan kepada nilai target pengkondisian yang ditentukan, dimana dilakukan uji validasi melalui pemberian kondisi buatan. Sistem berbantuan mikrokontroler ATmega32 mampu mengoperasikan peranti aktuator untuk menjaga kestabilan suhu “Ageng Setiani Rafika,Sudaryono,Wisnu Dwi Andoyo (2014) membuat pengendali suhu, namun juga dibuat sistem monitoringnya. Data yang didapat dari sensor suhu LM35” diolah kemudian ditampilkan berupa grafik real time dan tabel yang dapat dilihat dengan komputer menggunakan LCD yang dapat menunjukkan suhu yang sebenarnya pada suatu ruangan yang telah di pasang sensor LM35
Dengan melihat dan mempelajari sumber-sumber referensi yang ada penuilis bergagasan membuat “model otomatisasi kandang ternak menggunakan logika fuzzy (studi kasus : anak ayam broiler) ”
Pada penelitian ini penulis akan membuat Kendali pakan otomatis dan Monitoring Suhu untuk mengatur suhu kandang ayam broiler menggunakan Rangkaian Dimmer Dengan Sensor DHT 11 Kemudian Melakukan Report Dikirimkan Dalam Bentuk Excel .
Di harapkan dengan adanya teknologi ini akan mengurangi kecemasan kepada peternak dalam menanggulangi masalah tersebut
1.2 Tujuan Penelitian
Tujuan penelitian ini adalah untuk membuat model otomatisasi kandang ternak menggunakan logika fuzzy .
1.3 Ruang Lingkup Penelitian
Ruang lingkup dalam laporan penelitian ini dibatasi sebagai b erikut :
1. Sistem ini dibatasi dengan pembuatan model .
2.
Pemanas Suhu RuanganMenggunakan Media Lampu Pijar Yang di Atur Oleh Arduino Menggunakan Rangkaian Dimmer Lampu tersebut Dapat Di atur
Dengan Menurunkan Dan Menaikan Intensitas Cahaya.
3. Logika Fuzzy Digunakan Sebagai Perbandingan Pengkategorian Suhu Dan Kelembaban
4. Penggunaan Inkubator Hanya Dibatasi Untuk Ayam 1-7 Hari saja 5. Input System Menggunakan DHT11
Sebagai Pendeteksi Suhu Dan Ditampilkan Terhadap LCD , Lalu Arduino Memberi Pengaturan Otomatisasi Terhadap Komponen Yang berada Dalam Inkubator Ayam broiler Tersebut.
6. Ultrasonic Digunakan Untuk memberi Notifikasi Ketika Keadaan Wadah Tempat Pakan Dalam keadaan 20 – 50% Dan ketika dalam Kondisi Tersebut Buzzer akan Berbunyi untuk memberi Notifikasi Agar Segera Melakukan Pengisian Terhadap Wadah Pakan.
7. Servo Sebagai Penahan Pintu Pakan , Dan Mengatur Putaran Dimmer . 1.4 Manfaat Penelitian
Diharapkan dengan adanya penelitian ini dapat meberikan manfaat meningkatkan sistem keamanan, efektivitas pengaksesan pintu dan menghindari pencuri membuka pengunci dengan seutas kawat atau dengan kunci tiruan lainnya.
TINJAUAN PUSTAKA 2.1 Tinjauan Pustaka
2.1.1. Ayam Broiler
Ayam Broiler Ayam broiler merupakan hasil teknologi yaitu persilangan antara ayam Cornish dengan Plymouth Rock. Karakteristik ekonomis, pertumbuhan yang cepat sebagai penghasil daging, konversi pakan rendah, dipanen cepat karena pertumbuhannya yang cepat, dan sebagai penghasil daging dengan serat lunak (Murtidjo, 1987). Menurut Northe (1984) pertambahan berat badan yang ideal 400 gram per minggu untuk jantan dan untuk betina 300 gram per minggu. Ayam broiler adalah ayam tipe pedaging yang telah dikembangbiakan secara khusus untuk pemasaran secara dini. Ayam pedaging ini biasanya dijual dengan bobot rata-rata 1,4 kg tergantung pada efisiensinya perusahaan. Menurut Rasyaf (1992)
2.1.2. Mengenai Suhu Kandang AyamBroiler Sistem perkandangan yang ideal untuk usaha ternak ayam ras meliputi: persyaratan temperatur berkisar antara 30-35 derajat C, kelembaban berkisar antara 60-70%, penerangan/pemanasan kandang sesuai dengan aturan yang ada, tata letak kandang agar mendapat sinar matahari pagi dan tidak melawan arah mata angin kencang, model kandang disesuaikan dengan umur ayam, untuk anakan sampai umur 2 minggu atau 1 bulan memakai kandang box, untuk ayam remaja ± 1 bulan sampai 2 atau 3 bulan memakai kandang box yang dibesarkan dan untuk ayam dewasa bisa dengan kandang postal atapun kandang bateray. Untuk kontruksi kandang tidak harus dengan bahan yang mahal, yang penting kuat, bersih dan tahan lama memakai kandang box yang dibesarkan dan untuk ayam dewasa bisa dengan kandang postal atapun kandang bateray. Untuk kontruksi kandang tidak harus dengan bahan yang mahal, yang penting kuat, bersih dan tahan lama (Bambang,1995).
Umur(hari) Suhu (0Celcius) Kelembapan (%)
0-3 4-7 8-14 15-21 22-24 33-31 32-31 30-28 28-26 26-23 55-60 55-60 55-60 55-60 55-65
Tabel.1 : Suhu dan Kelembaban Udara Untuk Ayam
(Sumber : Manual Guide Logman,2004) 2.1.3. Intensitas Cahaya
Perilaku unggas sangat dipengaruhi oleh intensitas cahaya. Secara umum, cahaya yang lebih terang akan mendorong peningkatan aktivitas, sedangkan intensitas yang lebih rendah efektif dalam mengontrol tindakan-tindakan agresif yang dapat mengakibatkan kanibalisme. Charles et al (1992) dalam Olanrewaju (2006), mengamati peningkatan bobot badan ketika broiler ditumbuhkan di bawah intensitas cahaya 5 lx. Intensitas cahaya yang lebih tinggi mengurangi bobot badan karena aktivitas meningkat. Riset menunjukkan intensitas cahaya yang amat sangat rendah (kurang dari 5 lx) dapat menyebabkan degenerasi retina, bupthalmuos, miopía, glaucoma dan kerusakan pada lensa
mata yang mengarah pada kebutaan. Anak unggas (umur 1 – 28 hari) secara umum lebih menyukai pencahayaan yang lebih terang.
2.1.4. Mengenai Pakan Ayam
Pemberian pakan pada periode starter pada minggu pertama dilakukan secara adlibitum yaitu pemberian pakan secara terus-menerus. Pemberian pakan ini dilakukan sesering mungkin dengan jumlah sedikit demi sedikit. Anak ayam pada periode ini masih dalam tahap belajar dan adaptasi dengan lingkungan sehingga pemberian pakan dalam jumlah sedikit demi sedikit dimaksudkan agar tidak banyak terbuang dan tidak tercampur dengan kotoran ayam (Fadilah et al., 2007). Pola pemberian pakan yang baik akan membantu meningkatkan konsumsi pakan minggu pertama. Pemberian pakan sedikit demi sedikit, tetapi sesering mungkin sangat dianjurkan.
2.1.5. Arduino Uno
Arduino Uno adalah board mikrokontroler yang di dalamnya terdapat mikrokontroler, penggunaan jenis mikrokontrolernya berbeda – beda tergantung spesifikasinya. Pada Arduino Uno diguanakan mikrokontroler berbasis ATmega 328. Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB , jack power , ICSP header, dan tombol reset . Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya (Arduino.cc 2015).
Gambar 1 Arduino Uno 2.1.6. Dimmer
Dimmer merupakan suatu rangkaian yang berfungsi sebagai saklar elektronik. Dalam rangkaian ini terdapat sebuah komponen utama yang berfungsi sebagai saklar sen- tuh
yaitu resistor yang salah satu kakinya diambangkan. Dimana cara kerja resistor ini salah satu kakinya di- ambangkan tidak terhubung, sehingga kaki resistor ini adalah kondisi ON/OFF rangkaian. Yang apabila disen- tuh maka rangkaian dimmer akan bekerja dan memberikan perintah ke IC 555 sebagai op-amp yang outputnya seba- gai input dari IC 4017 sebagai IC register yang akan mem- proses dan memberikan pulsa ke relay yang kemudian out- putnya dari relay tersebut yaitu sebuah lampu sebagai in- dicator.(Herlin Sutanto 2012) 2.1.7. Logika Fuzzy
Sistem fuzzy adalah sebuah sistem yang dibangun dengan definisi, cara kerja dan deskripsi yang jelas berdasarkan pada teori lo gika fuzzy Kendali fuzzy logic merupakan klasifikasi sistem kendali modern yang didasarkan pada kaidah kabur ( fuzzy). Fuzzy Logic Controller (FLC) Teori ini menggunakan variabel linguistik. Misalnya motor listrik dinyatakan dengan nilai ‘cukup lambat’, ‘lambat’, ‘cepat’, ‘cukup cepat’, ‘sangat cepat, dan sebagainya. Nilai dalam bentuk kata-kata tersebut dinyatakan dalam himpunan fuzzy yang didefinisikan pada semesta pembicaraan dari harga-harga yang mempengaruhi kecepatan misalnya tegangan dan arus. Dengan demikian keputusan yang diambil berupa nilai himpunan fuzzy. Misalnya jika putaran sangat cepat, maka kurangkan tegangan masukan motor cukup negatif. Jika putaran lambat, maka tambahkan tegangan input motor cukup positif. Dengan dasar itulah pengendalian motor dapat dilakukan (Naba, 2009).
2.1.8. Sensor Suhu DHT11
sensor DHT 11 yang merupakan sensor dengan kalibrasi sinyal digital yang mampu memberikan informasi suhu dan kelembaban. Sensor ini tergolong komponen yang memiliki tingkat stabilitas yang baik, serta ditambah dengan kemampuan mikrokontroler 8 bit seperti Arduino sinyal transmisi jarak hingga 20 meter, sehingga berbagai aplikasi dan bahkan aplikasi yang paling menuntut. Koefisien kalibrasi DHT 11 disimpan dalam OTP program memori, sehingga ketika internal sensor mendeteksi sesuatu, maka modul ini membaca koefisien sensor. (D-Robotics 2010)
Gambar 2 Sensor DHT 11 2.1.9. LCD 16x2
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal – alat elektronik seperti televisi, kalkulator, atau pun layar komputer. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. (Sainsmart 2015).
Gambar 3 LCD 16x2 2.1.10. Motor Servo
Servo adalah perangkat kecil yang menghubungkan dua kawat motor DC, sebuah motor kereta , potensiometer, sirkuit terpadu, dan output poros. Dari tiga kabel yang mencuat dari casing bermotor, satu adalah untuk kekuasaan, satu adalah untuk tanah, dan satu ada lah masukan garis kontrol. Poros servo dapat diposisikan untuk posisi sudut tertentu dengan mengirimkan sinyal kode. Selama sinyal kode terakhir pada baris masukan, servo akan mempertahankan posisi sudut poros. Jika ada perubahan terhadap sinyal kode, posisi sudut dari poros akan berubah . (DARREN SAWICZ. 2002)
Gambar 4. Motor Servo
2.1.11. RTC DS3231
DS3231 real-time clock (RTC) yang sangat akurat I2C, terintegrasi dengan osilator suhu-kompensasi kristal (TCXO) dan kristal. Perangkat menggabungkan input baterai, mempertahankan ketepatan waktu yang akurat. osilator terpadu meningkatkan akurasi jangka
panjang perangkat dan mengurangi jumlah komponen dari jalur produksi. DS3231 ini tersedia dalam rentang suhu komersial , menggunakan 16-pin 300 mil DO paket. RTC mempertahankan detik, menit, jam, hari, tanggal, bulan, dan informasi tahun. Kurang dari 31 hari bulan, tanggal akhir akan secara otomatis disesuaikan, termasuk koreksi. Menyediakan dua jam alarm dikonfigurasi dan kalender dapat diatur untuk output gelombang persegi. dipantau sebagai menghasilkan μP ulang secara manual.(saint smart 2015)
Gambar 5.RTC 2.1.12. Lampu Pijar
Lampu pijar merupakan sebuah lampu yang berbeda dengan lampu hemat energi pada jaman sekarang ini. Walaupun demikian lampu pijar dapat menghasilkan energi panas di sekitar lampu dibandingkan dengan lampu hemat energi, untuk itulah lampu pijar kebanyakan digunakan untuk memanaskan suatu ruangan khusus seperti pada inkubator penetasan telor, maupun inkubator DOC( Day Old Chick ).Cara kerja lampu pijar adalah adanya arus listrik yang mengalir ke sebuah filamen pada lampu, sehingga akan membuat filamen memanas dan akan menghasilkan suatu cahaya..(Anggara Adi Pratama 2014)
Gambar 6. Lampu Pijar 2.1.13.
Relay
Relay adalah komponen elektro mekanik yang digunakan untuk mengoperasikan seperangkat kontak saklar, dengan memanfaatkan tenaga listrik sebagai sumber energinya. Arus yang dibuthkan oleh modul relay sebesar 5V 15-20mA, dilengkapi dengan arus tinggi, AC250V 10A, DC30V 10A (Sainsmart 2015)
Gambar 7 Relay METODE PENELITIAN 3.1. Metode Penelitian
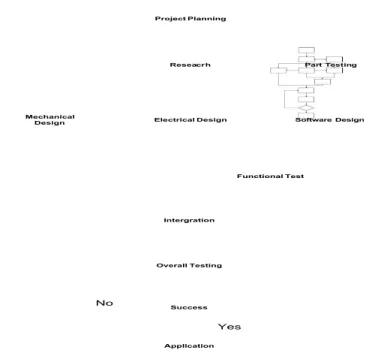
Metode penelitian yang digunakan adalah menggunakan metode penelitian bidang hardware programing yang ditunjukkan pada gambar 7.
Project Planning
Reseacr h Part Testing
Mechanical
Design Electrical Design Software Design
Functional Test Intergration Overall Testing Application Success No Yes
Gambar 8 Metode Penelitian Hardware Programing
3.1.1 Perencanaan Rancangan Penelitian (
Project Planning
)Dalam perencanaan proyek penelitian, terdapat beberapa hal penting yang harus ditentukan dan dipertimbangkan, antara lain: 1. Penentuan topik Penelitian
2. Estimasi kebutuhan alat dan bahan 3. Estimasi anggaran
4. Kemungkinan penerapan dari aplikasi yang akan dirancang.
3.1.2 Penelitian (
Research
)Penelitian awal dari aplikasi yang akan dibuat, mulai dari pemilihan dan pengetesan komponen (alat dan bahan) yang akan digunakan, kemungkinan rancangan awal dan akhir yaitu “model otomatisasi kandang ternak menggunakan logika fuzzy (studi kasus : anak ayam broiler)”.
3.1.3 Pengetesan Komponen (
Parts Testing
) Dalam pengetesan komponen dilakukan pengetesan alat terhadap fungsi kerja komponen berdasarkan kebutuhan dari aplikasi yang akandidesain.
3.1.4 Desain Sistem Mekanik (
Mechanical
Design
)Dalam perancangan perangkat keras, desain mekanik merupakan hal penting yang harus dipertimbangkan. Pada umumnya kebutuhan aplikasi terhadap desain mekanik antara lain :
1. Bentuk dan ukuran PCB ( Printed Circuit Board )
2. Ketahanan dan fleksibilitas terhadap lingkungan
3. Penempatan modul-modul elektronik 4. Pengetesan sistem mekanik yang telah di
rancang
5. Bentuk desain ukuran interface system 3.1.5 Desain Sistem Listrik (
E lectrical
Design
)Dalam desain sistem listrik dan mekanis terdapat beberapa hal yang harus diperhatikan, antara lain :
1. Sumber catu daya dan pembagian daya untuk masing-masing komponen
2. Kebutuhan tegangan dan arus untuk mikrokontrol, sensor dan actuator 3. Desain sekema rangkaian
3.1.6 Desain Perangkat Lunak
Desain perangkat lunak yang digunakan dalam penelitian ini menggunakan perangkat lunak Arduino IDE, MS office, Visio dan Fritzing.
3.1.7 Tes Fungsional (
F unctional Test
)Tes fungsional meliputi pengetesan fungsional sistem yang telah terintegrasi antara desain listrik dan desain perangkat lunak.
3.1.8 Integrasi atau Perakitan (
I ntegr ation
) Modul listrik yang diintegrasi dengan software di dalam kontrolernya, diintegrasikan dalam struktur mekanik yang telah dirancang. Lalu dilakukan tes fungsional keseluruhan sistem.3.1.9 Tes Fungsional Keseluruhan sistem (
Overall Testing
)Pada tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem. Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang tidak dapat bekerja dengan baik maka harus dilakukan proses perakitan ulang pada setiap desain sistemnya.
3.1.10 Application
Application untuk meningkatkan performa dari aplikasi yang telah dirancang. Optimasi ditekankan pada desain mekanik agar penggunaan lebih maksimal serta optimal.
3.2 Rancangan Logika Fuzzy
Sistem inferensi fuzzy yang digunakan pada pengendali suhu ini adalah metode mamdani. Pada metode mamdani, untuk mendapatkan output diperlukan 4 tahap yaitu:
1. Pembentukan himpunan fuzzy (fuzzifikasi). 2. Aplikasi fungsi implikasi (aturan).
3. Komposisi aturan.
4. Penegasan (defuzzifikasi).
3.3 Waktu dan Tempat Penelitian
Penelitian ini dilaksanakan mulai Bulan Maret 2016 sampai Mei 2016. Waktu pelaksanaan dilaksanakan setiap hari senin – rabu di Kp Nagela RT/RW 03/03 Desa Sukadamai Kecamatan Dermaga, Kab Bogor dan Di luar tempat penelitian
3.4 Alat dan Bahan a. Alat
1. Netbook Asus A455L intel ® Core(TM) i5-5200U CPU @ 2.20GHz (4 CPUs), ~2.2GHz. b. Bahan 1. Arduino Uno . 2. Sensor DHT 3. Rangkaian Dimmer 4. Lampu 5. Kandang 6. Baterai 12V 7. RTC3231 8. LCD 9. Motor Servo 10. Buzzer 11. Ultra Sonic 12. Komponen Pendukung 13. Humidifier
PERANCANGAN DAN IMPLEMENTASI 4.1 Perencanaan Rancangan Penelitian
(Project Planning)
Tahap perencanaan proyek penelitian adalah Tahapan kegiatan dari proses pembuatan sistem. Komponen yang dibutuhkan dalam perancangan sistem adalah Arduino Uno, RTC , Relay, Lampu, Motor Servo , LCD, Kipas, Humidifier ,Ultra Sonic, DHT 11 dan Buzzer .
4.2 Penelitian
(Research)
Setelah perencanaan sistem, kemudian dilanjutkan dengan penelitian awal dari sistem yang akan dibuat. Pada tahap penelitian dilakukan perancangan awal rangkaian mekanik serta komponen dari model sistem pemberian pakan otomatis dan juga pengatur suhu pada kandang Anak Ayam Broiler ini untuk memastikan bahwa semua komponen dapat berjalan dengan optimal. Sistem ini menggunakan Arduino Uno R3 sebagai pemrosesan data. Input sistem menggunakan DHT11 sebagai sensor Pendeteksi Suhu , Ultra sonic sebagai sensor pendeteksi Stock dari pakan
Ketika akan Habis dan ketika pakan habis makan Buzzer memberikan Notifikasi , RTC sebagai pengatur waktu. Output sistem yaitu penahan pintu pakan yang akan menyala dengan motor servo sebagai penggerak penahan pintu pakan , serta Servo sebagai pengontrol intensitas cahaya pada model lampu Pengatur suhu, serta LCD sebagai penampil waktu dan Keadaan Suhu yang berjalan.
4.3 Pengetesan Komponen
(Part Testing)
Pada tahap ini dilakukan pengetesan komponen-komponen yang akan digunakan menggunakan multimeter. Pengetesan menggunakan Arduino serial monitoring dilakukan dengan melihat output tiap komponen yang terhubung dengan Arduino melalui koneksi USB. Pengujian menggunakan multimeter meliputi pengujian tegangan input dan output setiap komponen.4.4 Desain Sistem Mekanik
(Mechanical
Design)
Berikut desain mekanik sistem seperti pada gambar 10 berikut merupakan contoh design
untuk model otomatisasi ini.
Gambar 10 .Keseluruhan Design Keseluruhan Sistem
Prototipe atau model terbuat dari akrilik, dengan tinggi 42 cm dan panjang ± 58cm dan lebar 43,5
, Untuk tempat Pakan tinggi 18 cm dan Panjang ± 18cm Lebar 28cm ±
4.5 Desain Elektronik (
E lektronik Design)
Perancangan skematik rangkaian menggunakan perangkat lunak Fritzing berdasarkan diagram blok pada gambar 9 berikut.
Gambar 11 Skematik Rangkaian
Sumber tegangan menggunakan daya 12V yang akan menyuplai arus ke masing-masing komponen. Tegangan yang masuk ke relay Dan untuk dimmer menggunakan Catu daya 220v. 4.6
Desain E lektrik
Gambar 12. Diagram Blok 4.7 Desain Perangkat Lunak
Desain perangkat lunak sistem dibuat dengan Bahasa Pemrograman Processing pada
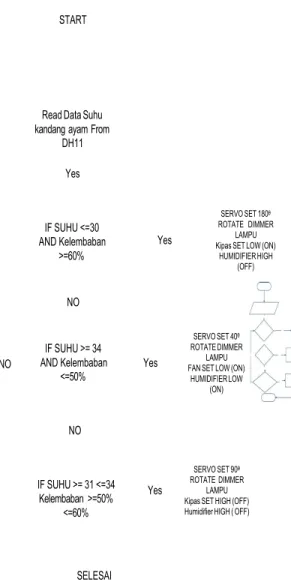
Arduino Uno berdasarkan flowchart pada gambar 12 berikut.
SERVO SET 180ᶿ
ROTATE DIMMER LAMPU Kipas SET LOW (ON)
HUMIDIFIER HIGH (OFF)
START
Read Data Suhu kandang ayam From
DH11 IF SUHU <=30 AND Kelembaban >=60% IF SUHU >= 34 AND Kelembaban <=50% SERVO SET 40ᶿ ROTATE DIMMER LAMPU FAN SET LOW (ON)
HUMIDIFIER LOW (ON) Yes SELESAI Yes NO Yes IF SUHU >= 31 <=34 Kelembaban >=50% <=60% NO SERVO SET 90ᶿ ROTATE DIMMER LAMPU Kipas SET HIGH (OFF) Humidifier HIGH ( OFF)
Yes NO
Gambar 13 Flowchart Sistem Pemanas Ruangan (Sesudah Proses Fuzzy)
Penjelasan dari flowchart sistem pemanas ruangan di atas :
1. Mulai
2. Inputan suhu DHT11, jika inputan SUHU Di bawah 30 Celcius Dan kelembaban 70% maka Servo Memutar Intensitas Lampu Dalam Putaran Maksimal 180 Derajat Dan Kipas Keadaan Menyala 3. jika inputan SUHU Di atas 34 Celcius
Dan kelembaban di 50% maka Servo Memutar Intensitas Lampu Dalam Putaran Maksimal 40 Derajat Dan Kipas Keadaan Menyala
4. jika inputan SUHU Di 31 - 33 Celcius Dan kelembaban di 55% maka Servo Memutar Intensitas Lampu Dalam Putaran Maksimal 90 Derajat Dan Kipas Keadaan Mati 5. Selesai Start Power On Set Timer 1 Set Timer 2 Timer 1 Timer 2
Timer= On,Cek Stock Pakan IF Pakan Habis? 50% Buzzer Beep Short Buzzer off IF Pakan Habis? 25% Buzzer Beep Long YES NO YES NO NO
IF Wadah Pakan Full ? Pintu Servo Menutup Yes Pintu Servo Membuka NO END
Gambar 14. Flowchart Sistem
Penjelasan dari flowchart sistem secara keseluruhan di atas :
Penjelasan dari flowchart sistem pemberi pakan di atas :
1. Mulai
2. Input Set timer Buka Pintu Tempat Pakan 3. Input Set timer Tutup Pintu Tempat
Pakan
4. Jika Stock Tempat Pakan Keadaan 50% Maka Buzzer Berbunyi Beep Pendek 5. Jika Stock Tempat Pakan Keadaan 25%
Maka Buzzer Berbunyi Beep Panjang 6. Jika stock Penuh 51-100% Buzzer off 7. Selesai
4.8 Test Fungsional
Tes fungsional dilakukan terhadap perangkat lunak yang telah didesain. Proses tes ini dilakukan untuk meningkatkan kinerja dari perangkat lunak dalam pengontrolan terhadap desain listrik dan mengeliminasi serta antisipasi error dari software yang dibuat. Bila sistem
software telah selesai diuji maka masuk ke proses perakitan.
4.9 Perakitan
Pada proses ini dilakukan proses perakitan berdasarkan dari proses desain, baik desain mekanis, elektronik maupun desain perangkat lunak.
HASIL DAN PEMBAHASAN 5.1 Hasil Penelitian
Model terbuat dari akrilik dengan tinggi ± 43,6 cm dan panjang ± 58cm. Komunikasi Arduino Uno dan LCD 16x2 dihubungkan melalui i2C. Pengaturan Lampu menggunakan Servo dan Dimmer yang bergerak berdasarkan pendeteksian Sensor dht11 , relay di gunakan untuk mengatur kipas Dan humidifier Arduino uno mengatur output terhadap semua komponen , untuk tempat pakan pintu servo di gunakan untuk menahan dan membuka pintu pakan yang t erbuka berdasarkan timer , ultra sonic digunakan sebagai pendeteksi ketika pakan habis .
Gambar 15. Keseluruhan Sistem
5.2 Test Fungsional Keseluruhan Sistem (Overall Testing)
Tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem. Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang tidak dapat bekerja dengan baik, maka harus dilakukan proses perakitan ulang setiap bagian sistemnya. Pengujian ini meliputi pengujian struktural, fungsional dan validasi.
5.2.1 Pengujian Struktural
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui apakah jalur-jalur rangkaian sudah terhubung dengan benar sehingga sistem dapat berjalan berfungsi dengan baik. Pengujian ini dilakukan dengan mengetes jalur-jalur rangkaian menggunakan multimeter.
Berikut tabel hasil pengujian struktural sistem. 5.2.2 Pengujian Fungsional
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui apakah tegangan
yang mengalir di dalam rangkaian sudah sesuai dengan yang dibutuhkan. Pengujian ini dilakukan dengan cara mengetes tegangan output tiap komponen dengan menggunakan multimeter maupun program.
5.2.3 Uji coba Validasi
Tahap ini dilakukan untuk menguji
apakah
Sensor
telah
bekerja
dengan
semestinya sesuai range yang di gunakan
Tabel 2 Ujicoba Validasi Komponen
5.3 Optimasi (
Optimization)
Pada tahap optimasi sensor suhu ini dilakukan untuk mengetahui performa dari sistem yang telah dibuat sehingga dapat mengetahui apakah sistem berjalan dengan baik dan sesuai atau sebaliknya.DHT 11 Memiliki transmisi jarak hingga 20 meter
Tabel 3 Optimasi Pada Sensor Suhu(DHT11)
Tabel 4. Suhu dan Kelembaban Kandang Ternak ,
Pengujian Di lakukan selama 2 Jam Dari grafik diatas Suhu pada keadaan awal cenderung
0 100
13:00 13:30 14:00 14:30 15:00
TABEL SUHU & Kelembaban
Rendah karena tidak adanya pencahayaan dari lampu , Pada 30 Menit berikutnya Suhu Telah Berhasil Naik sampai ke titik 32C’ , pada 1 Jam setelahnya lampu di nyala . Suhu Akan Mulai terasa sangat panas karena Pada siang hari cuaca Cenderung lebih panas . Dapat kita lihat alat ini dapat mempertahaan kembali suhunya dalam 33’C Pada saat keadaan Cuaca panas Tersebut Berdasarkan Tabel Kebutuhan Suhu dan Kelembaban Kandang Brooder Ayam Membutuhkan Suhu di antara 30 – 33 C Dan Kelembaban adalah 55 – 60 % Berdasarkan(Herlin Sutanto 2012) Suhu di kandang memiliki galat mulai dari 30-35C Tergantung Kondisi Cuaca pada Kandang 5.4 Fuzzy Logic
Fuzzy logic di gunakan untuk mencari kebenerana bahwa suhu tersebut cenderung membutuhkan keadaan lampu tersebut , Berikut Adalah Range Dan Rules yang di gunakan.
Kering(0-60) Sedang (50-70) Lembab(60-90
)
Dingin(0-33) Sedang (30-35) Panas (33-50)
Redup(0-60) Sedang (60-120)Terang(90-180)
5.5.1.3 Aturan Dasar
F uzzy
Aturan dasar fuzzy diperoleh dari
fungsi keanggotaan variabel input. Berikut
aturan dasar fuzzy
R1 : IF Suhu Dingin (0-33) AND Kelembaban Kering (0-60) Then Lampu Terang (90-180)
R2 : IF Suhu Dingin (0-33) AND Kelembaban Sedang (50-70) Then Lampu Terang (90-180)
R3 : IF Suhu Dingin (0-33) AND Kelembaban Basah (60-80) Then Lampu Terang (90-180)
R4 : IF Suhu Sedang (30-35) AND Kelembaban Kering (0-60) Then Lampu Sedang (60-120)
R5 : IF Suhu Sedang (30-35) AND Kelembaban Sedang (50-70)Then Lampu Sedang (60-120)
R6 : IF Suhu Sedang (30-35) AND Kelembaban Basah (60-80) Then Lampu Sedang (60-120)
R7 : IF Suhu Panas (33 – 50) AND Kelembaban Kering (0-60) Then Lampu Redup (0-60)
R8 : IF Suhu Panas (33 – 50)AND Kelembaban Sedang (50-70) Then Lampu Redup (0-60)
R9 : IF Suhu Panas (33 - 50) AND Kelembaban Basah (60-80) Then Lampu Redup (0-60)
5.5.2 Rule Viewer Matlab
Pengambil keputusan terhadap output terhadap Kebutuhkan intensitas lampu, sebelumnya peneliti sudah melakukan penelitian lapangan Sebelumny,untuk proses output menggunakan metode proses defuzzifikasi . Berikut adalah Rule Viewer Yang di hasilkan
Gambar 17. Rule Viewer Suhu Sedang
Jika Suhu 31 C Dan Kelembaban 45%
Maka Lampu Dinyatakan Menyala Sedang (90)
5.5.3 Pengaplikasiian Fuzzy logic
Penggunaan fuzzy logic sebagai pengatur dan pembatas nilai dari variable suhu dan juga hasil defuzzifikasi digunakan sebagai nilai tingkat putaran pengaturan lampu menggunakan motor servo yang merotasi sampai 180 Derajat.
5.5.3.1 Penjelasaan Pengaplikasian Fuzzy logic
dengan menggunakan fuzzy logic dapat membantu pembentukan konsep dalam pengambil keputusan . Pada simulasi MatLab, akan dilakukan diberikan masukan nilai suhu, kelembaban dan output kebutuhan lampu , Sedangkan pada Arduino, akan menampilkan 2 data yaitu suhu, kelembaban merupakan percobaan logika fuzzy . setelah itu melakukan Eksekusi Terhadap pada output pada Lampu Berdasarkan Kesimpulan proses Fuzzy logic dan Trial And Eror ,yang diberi gangguan terhadap perubahan suhu dan kelembaban yang dapat kita lihat pada pembahasan Optimasi. ketika suhu tersebut di berikan gangguan alat yang menggunakan Fuzzy Cenderung dapat mempertahankan suhu tersebut tetap dalam
keadaan yang dibutuhkan,
Berdasarkan Hasil Penelitian Menggunakan Fuzzy Logic maka di dapatkan Kesimpulan
Tabel 5. Hasil Defuzzyfikasi
SUHU Kelembaban Output
0-30 0 - 50 Terang
31 - 33 51-60 Sedang
34 -∞ 61- ∞ Redup
Berdasarkan Penelitian Dari vedca pada table 16 suhu dan kelembaban ideal yang di butuhkan oleh ayam berada pada titik 31-33C dan untuk kelembaban adalah 55 – 60 %.
KESIMPULAN DAN SARAN 6.1 Kesimpulan
Kesimpulan dari model otomatisasi kandang ternak adalah Alat ini menggunakan Arduino Uno R3, Servo, Sensor DHT11, Dimmer , Ultrasonic Buzzer . Input sistem pengatur menggunakan sensor DHT11 yang akan
ditampilkan pada lcd 16x2 Input sistem pengatur pakan menggunakan servo , dan ultra sonic sebagai pendeteksi pakan . input dari alat pengatur suhu ini yaitu suhu dingin sedang dan panas , untuk kelembaban kering normal basah , output lampu redup normal terang . output lampu menggunakan nilai linguistik berupa nilai output dari hasil defuzzyfikasi yang berfungsi untuk mengnyatakan bahwa suhu tersebut layak untuk
menggunakan intensitas lampu tersebut, Jarak jangkauan sensor dht11 dengan transmisi sinyal maksimal 20 m , sedangkan pada tempat pakan masi belum mampu menurunkan pakan yang sangat halus dan sifatnya mudah melembab. Output sistem berupa kipas humidifier lampu on/off .
Kelebihan dari Model sistem ini adalah sistem ini mampu mempertahankan keseimbangan suhu mulai dari 30 – 33 C dan Kelembaban tergantung kondisi cuaca sekitar dan pengaplikasian servo tertutup ketika ultrasonic membaca <6cm dan mengisi jika jarak >8cm dengan putara servo sebesar 90 Derajat ultra Sonic melakukan pengecekan 2x sehingga kondisi dapat menanggulangi keadaan ketika tempat pakan terganggu oleh ternak yang menghalangi sensor ultrasonic , tempat pakan dapat mendeteksi ketika pakan kosong dengan menggunakan buzzer sebagai notifnya .
Sistem ini masi banyak kekurangan salah satunya , kendala ketika tempat pakan di isi oleh bahan yang sifatnya mudah melembab . humidifier sulit menaikan Kelembaban ketika terkena Fan karena embun tertiup oleh angin , 6.2 Saran
Model otomatisasi ini masih belum sempurna, sehingga dibutuhkan penyempurnaan agar sistem memiliki nilai fungsional yang kompleks. Beberapa saran yang dapat dikembangkan antara lain adalah penggunaan teknologi Monitoring seperti teknologi Internet Of Things yaitu teknologi yang mengandalkan jaringan internet penambahan sensor yang lebih baik seperti dht22 .
DAFTAR PUSTAKA
Andrianto,H.(2013)Pemrograman Mikrokontroler AVR ATMega16 Menggunakan bahasa C. Bandung : INFORMATIKA.
Cahyono dan Bambang, 1995. Cara Meningkatkan Budidaya Ayam Ras Pedaging (broiler). Penerbit Pustaka Nusatama: Yogyakarta.
D-Robotics 2010 DataSheet DHT11 Humidity & Temperature Sensor
DARREN SAWICZ. 2002 DATA SHEET FOR TS-53 SERVO ELECTRIC
MOTOR,Priceton,NewJersey,UnitedSta tes
Desrosier, W. Fellow. 1988. Teknologi Pengawetan Pangan. Universitas
Indonesia.Jakarta.
Fadillah, R., A. Polana., S. Alam., & E. Pa rwanto. 2007. Sukses Beternak Ayam Broiler. Agromedia Pustaka, Jakarta. Ir. Zumrotun, MP 2012. (Widyaiswara
PPPPTK Pertanian)
http://vedca.siap.web.id/2012/03/22/man ajemen-brooding-pada-ayam-broiler- oleh-ir-zumrotun-mp-widyaiswara- pppptk-pertanian/
Murtidjo, B. A. 1987. Pedoman Meramu Pakan Unggas. Kanisius. Yogyakarta.
Naba, Agus. 2009. Belajar Cepat Fuzzy Logic Menggunakan Matlab. Andi.
Yogyakarta.
North, M. O. 1984
. Commercial Chicken Production Manual. 3rd Ed. The AviPublishing Company, Inc. Wesport, Connecticut.
Pratama A, A,2014. Datasheet Design and Impelentation of Prototype Automatic Control System for Chick Cage Using Fuzzy Logic Method,Bandung, ITT-AK-FEK-PTT-FM-004/001
Paul,A.(1989). Prinsip- prinsipElektronika.Jakarta : Erlangga
Rasyaf. M, 1994
. Beternak Ayam Petelur. Penebar Swadaya: JakartaSainsmart. 2015. Datasheet Arduino Uno , Lenexa, Kansas. Amerika serikat.
Sainsmart. 2015. Datasheet LCD , Lenexa, Kansas. Amerika serikat
Sainsmart. 2015. Datasheet DS3231 AT24C32 , Lenexa, Kansas. Amerika serikat
Sainsmart. 2015. Datasheet Relay, Lenexa, Kansas. Amerika serikat.
Siregar, A.P., dan M. Sabrani. 1970. Teknik Modern Beternak Ayam. C.V
Sutanto,H.2012.SAKLAR DIMMER LAMPU
EMPAT TAHAP
FILKOM/DC/PI/00001/2012
Suci, D. M., E. Mursyida, T. Setianah, & R. Mutia. 2005. Program pemberian makanan berdasarkan kebutuhan protein dan energy pada setiap fase pertumbuhan ayam Poncin. Med. Pet. 28:
70-76.
Sudaro, Y. & A. Siriwa. 2007. Ransum Ayam dan Itik. Cetakan IX. Penebar Swadaya, Jakarta.
Suprijatna, E. Umiyati, A. Ruhyat, K. 2005. Ilmu Dasar Ternak Unggas. Penebar Williamson, G. and W. J. A. Payne, 1993.
Pengantar Peternakan di Daerah Tropis, Universitas Gajah Mada, Yogyakarta.
Zadeh, L.A, 1995, Discussion : “Probability Theory are Complementary rather than Competitive” dalam : Ross, Timothy J. Fuzzy Logic with Engineering Application. Edisi kedua, John Willy & Sons Inc. Inggris.