BAB 5
SIMULASI GERAK WAHANA PELUNCUR
POLYOT
5.1 Pendahuluan
Simulasi gerak wahana peluncur Polyot dilakukan dengan menggunakan perangkat lunak Simulink Matlab 7.0 ®. Dalam simulasi gerak ini dimodelkan gerak roket setiap waktunya dengan menggunakan persamaan-persamaan gerak roket yang telah dijelaskan sebelumnya pada Bab 2.
5.2 Asumsi
Selain batasan masalah yang telah dijelaskan pada Bab 1, simulasi gerak roket Polyot ini dimodelkan dengan menggunakan beberapa asumsi lain sebagai berikut:
• Konfigurasi roket Polyot yang digunakan adalah konfigurasi roket Polyot tiga tingkat dengan Upper Stage Booster (USB) sebagai mesin pendorong tingkat ketiga.
• Roket Polyot diasumsikan mengatur attitude control dengan Thrust Vectoring
Control (TVC).
• Model atmosfer yang dipakai adalah model atmosfer ISA untuk ketinggian 0-80000m. Untuk ketinggian di atas ketinggian atmosfer ISA, diasumsikan tidak lagi bekerja gaya-gaya dan momen aerodinamika pada roket Polyot.
• Koefisien gaya-gaya dan momen aerodinamika merupakan fungsi bilangan Mach, sudut serang dan ketinggian. Koefisien gaya-gaya dan momen aerodinamika yang digunakan adalah hasil prediksi dari perangkat lunak Digital Datcom dan Missile Datcom.
• Gangguan udara, berupa angin, turbulensi atau kondisi cuaca diabaikan. • Gerak yang ditinjau dalam simulasi hanya gerak pada bidang vertikal, maka:
o Inklinasi orbit dan azimuth peluncuran diabaikan.
o Sudut slip samping, β = 0 0.
o Tidak ada gerak roll pada roket. Sehingga sudut roll, φ = 0 0.
• Laju perubahan massa konstan untuk tiap stage roket. Dengan menggunakan konstanta, go = 9.80665 m/s2.
• Pesawat udara pembawa (carrier aircraft) yang digunakan adalah Antonov An-124-100 Ruslan.
• Sudut pitch awal roket ketika dijatuhkan diasumsikan sama dengan negatif sudut pitch pesawat udara.
5.3 Pitch
Program
Program sudut pitch merupakan program yang ditentukan untuk mendapatkan lintas terbang roket yang baik. Pitch program ini dikontrol oleh momen yang terjadi dan sengaja ditimbulkan saat proses peluncuran roket [Ref. 15]. Pengaturan sudut
pitch dilakukan dengan mengatur besar pitch rate tiap segmen waktu. Dengan pitch
program ini diharapkan pada ketinggian burnout tingkat roket terakhir, roket sudah
memiliki sudut lintas terbang seperti yang diharapkan, yaitu mendekati nol agar memudahkan proses peletakan payload pada lintas orbit yang diinginkan.
Untuk mendekati kondisi yang sebenarnya, dalam simulasi yang dilakukan akan diterapkan pitch program yang berbeda untuk mengetahui prestasi peluncuran roket.
5.4 Sistem Kontrol Roket Polyot
Roket Polyot diasumsikan mengatur attitude control dengan memanfaatkan defleksi nosel (δ). Dengan sistem kontrol ini, roket dapat mengikuti pitch program
yang telah diberikan dan dapat dianalisa apakah pitch program yang diberikan dapat dilaksanakan oleh roket Polyot.
Berdasarkan persamaan rotasi (2-15), dapat dituliskan persamaan sebagai berikut: T e e yy yy F x qx m dt dI q M dt dq I ' 2 sin • + + − − = δ (5-1)
5.5 Proses
Simulasi
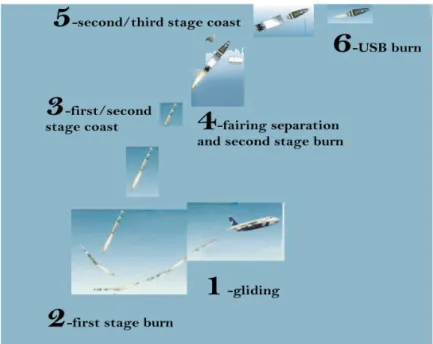
Dalam analisis prestasi terbang dan lintasan terbang melalui simulasi, gerak roket Polyot dari sejak didorong keluar hingga akhir pembakaran tingkat ke tiga dibagi dalam beberapa fase sebagai berikut:
Gambar 5-1. Fase terbang roket Polyot
5.5.1 Fase Terbang Layang (Gliding)
Fase ini dimulai dari saat roket Polyot didorong keluar dari pesawat udara Antonov An-124-100 Ruslan. Pada fase ini, roket Polyot diasumsikan memiliki kecepatan awal ke arah belakang (searah dengan kecepatan pesawat pembawa), dengan besar kecepatan yaitu kecepatan pesawat pembawa dikurangi dengan kecepatan dorong dari sistem pneumatik yang mengeluarkan roket Polyot dari pesawat pembawa. Fase ini berlangsung selama 7 detik dan persamaan gerak yang digunakan adalah persamaan gerak terbang layang, yaitu persamaan (2-17) dan (2-18) dan persamaan integral (2-13).
5.5.2 Fase Pembakaran Roket Tingkat Pertama
Fase ini dimulai ketika mesin roket tingkat pertama dinyalakan. Kemudian roket Polyot melakukan manuver pitch up untuk membuat roket bergerak naik. Manuver pitch up tersebut diatur dengan membuat pitch program untuk gerak roket
Polyot. Attitude control roket Polyot dilaksanakan dengan menggunakan Thrust
Vectoring Control (TVC).
Pada fase ini persamaan gerak yang digunakan adalah persamaan gerak roket 2 dimensi pada medan atmosfer, yaitu persamaan (2-12). Sedangkan gaya dorong yang digunakan adalah gaya dorong yang bervariasi terhadap ketinggian, seperti dinyatakan dalam persamaan (2-24).
Fase gerak yang kedua ini berlangsung selama 120 detik. 5.5.3 Fase Coasting Antara Tingkat Pertama dan Kedua
Pada fase ke tiga ini, mesin roket tingkat pertama telah dimatikan sehingga roket tidak lagi memiliki gaya dorong. Fase ini bertujuan sebagai persiapan untuk melakukan pemisahan roket tingkat pertama dengan sub-roket kedua.
Simulasi pada fase ini dilakukan dengan menggunakan persamaan gerak (2-12) dengan memasukkan harga gaya dorong dan koefisien aerodinamika sama dengan nol.
Lama fase gerak ketiga ini sangat singkat untuk memperkecil pengurangan harga VX yang terjadi.
5.5.4 Fase Pembakaran Roket Tingkat Kedua
Pembakaran roket tingkat kedua dilakukan sesaat setelah roket tingkat pertama terpisah. Saat dimulainya fase ini, fairing roket dilepaskan untuk mempersiapkan pelepasan payload. Gaya-gaya dan momen aerodinamika pada fase ini diabaikan karena harga kerapatan udara sudah sangat kecil ketika proses pembakaran roket tingkat ke dua dimulai.
Pada fase ini (dan selanjutnya pada fase pembakaran roket tingkat tiga), simulasi tidak menggunakan persamaan gaya dorong seperti pada persamaan (2-24). Hal ini dikarenakan tekanan keluaran nosel (Pe) tidak selalu bisa dikontrol agar selalu tetap sama seperti tekanan udara pada kondisi permukaan laut. Maka, pada fase ini digunakan asumsi gaya dorong konstan.
Persamaan gerak yang digunakan pada simulasi fase ini ialah persamaan gerak (2-12) dengan memasukkan harga nol untuk gaya-gaya dan momen aerodinamika.
Lama fase gerak ini selama 275 detik dengan pitch program disesuaikan agar saat fase gerak ini berakhir sikap pesawat sudah horizontal.
5.5.5 Fase Coasting Antara Tingkat kedua dan ketiga
Setelah pembakaran roket tingkat ke dua selesai, maka roket akan melakukan fasa coasting untuk mengatur sudut lintas terbangnya. Roket berusaha untuk mencapai sudt lintas terbang (γ) yang cukup kecil untuk melakukan injeksi payload pada lintasan yang menyinggung orbit kerjanya.
Persamaan gerak yang digunakan pada simulasi fase ini adalah persamaan gerak (2-12) dengan memasukkan harga nol untuk gaya-gaya dan momen aerodinamika serta gaya dorong.
Lama fase gerak ini disesuaikan dengan sudut lintas terbang (γ) roket pada akhir fase. Fase gerak ini berakhir saat sudut lintas terbang (γ) roket berharga mendekati nol.
5.5.6 Fase Pembakaran Roket Tingkat ketiga
Setelah mendapatkan harga sudut lintas terbang yang cukup kecil, mesin roket tingkat ketiga (USB) dinyalakan. Fase ini bertujuan untuk menambah kecepatan roket Polyot hingga mencapai kecepatan orbital yang diinginkan.
Pada fase ini persamaan gerak yang digunakan adalah persamaan gerak (2-12) dengan memasukkan harga nol untuk gaya-gaya dan momen aerodinamika.
Tujuan dari fase ini ialah mendapatkan ketinggian dan kecepatan akhir yang berupa ketinggian dan kecepatan orbital dari lintas orbit GTO. Sesuai dengan misi yang dilaksanakan, maka titik apocenter dari GTO tersebut harus berada pada ketinggian GEO. Kemudian sisa bahan bakar yang tersedia akan dipakai untuk mengeluarkan gaya dorong impulsif untuk beralih ke lintas orbit sirkular pada ketinggian GEO.
5.6 Hasil Simulasi dan Analisis
Simulasi gerak roket Polyot yang dilakukan mengacu pada referensi data-data peluncuran yang didapatkan, yaitu kondisi awal peluncuran, kondisi berat tiap tingkat, dan target orbit yang akan dijadikan sebagai acuan kondisi akhir peluncuran. Simulasi akan dimulai dengan memberikan variasi pitch program melalui input pitch rate
schedulling. Variasi pitch program tersebut dilakukan dengan tujuan melaksanakan
peluncuran yang dapat mencapai ketinggian dan kecepatan orbital dari lintas orbit tujuan dengan melalui trajektori yang dapat diterima.
5.6.1 Hasil Simulasi untuk Roket Tingkat Pertama
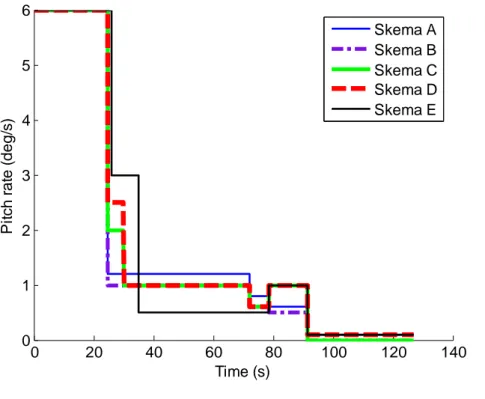
Pada simulasi akan diinputkan pitch program yang berbeda-beda seperti ditunjukkan pada gambar berikut:
0 20 40 60 80 100 120 140 0 1 2 3 4 5 6 Time (s) P it c h r at e (deg/ s ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-2. Variasi pitch rate
Skema pitch rate tersebut di atas diperoleh melalui proses trial and error
untuk melihat prestasi dari masing-masing skema yang diterapkan. Skema di atas hanya berlangsung pada fase pembakaran roket tingkat pertama. Selanjutnya pada fase pembakaran roket tingkat kedua diterapkan skema yang berbeda-beda sesuai dengan skema pada tingkat pertama. Perbedaan skema juga mengakibatkan perbedaan waktu pelaksanaan fase pada saat coasting antara tingkat kedua dan ketiga. Waktu
coasting ditentukan sedemikian hingga agar pada saat memasuki fase pembakaran
roket tingkat ketiga sudut lintas terbang (γ) sangat kecil (mendekati nol).
Hasil simulasi berdasarkan variasi skema pitch rate tersebut di atas pada roket tingkat pertama sebagai berikut:
0 7 40 60 80 100 127 -20 0 20 40 60 80 100 120 140 160 180 time (s) tet a ( degr ee) Skema A Skema B Skema C Skema D Skema E
Gambar 5-3. Grafik theta vs time
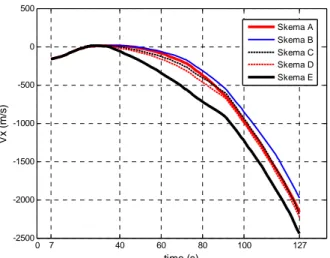
0 7 40 60 80 100 127 -2500 -2000 -1500 -1000 -500 0 500 time (s) Vx ( m /s ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-4. Grafik Vx vs time
0 7 40 60 80 100 127 -200 0 200 400 600 800 1000 1200 1400 1600 time (s) V z ( m /s ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-5. Grafik Vz vs time
0 7 40 60 80 100 127 -9 -8 -7 -6 -5 -4 -3 -2 -1 0x 10 4 time (s) Dis ta n c e ( m ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-6. Grafik X vs time
0 7 40 60 80 100 127 0 1 2 3 4 5 6 7 8 9x 10 4 time (s) H ei ght ( m ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-7. Grafik Z vs time
-9 -8 -7 -6 -5 -4 -3 -2 -1 0 x 104 0 1.1 2 3 4 5 6 7 8 9 Distance (m) H ei ght ( m ) Skema A Skema B Skema C Skema D Skema E Gambar 5-8. Grafik X vs Z
0 7 40 60 80 100 127 0 10 20 30 40 50 60 70 80 90 time (s) gam m a ( degr ee) Skema A Skema B Skema C Skema D Skema E
Gambar 5-9. Grafik gamma vs time
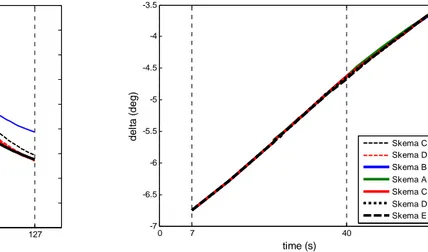
0 7 40 60 -7 -6.5 -6 -5.5 -5 -4.5 -4 -3.5 time (s) de lt a ( deg ) Skema C Skema D Skema B Skema A Skema C Skema D Skema E
Gambar 5-10. Grafik delta vs time
Melalui grafik-grafik di atas dapat dilihat pengaruh penerapan pitch program
yang berbeda-beda. Dari gambar 5.3 dapat dilihat variasi pitch akibat variasi pitch rate. Dapat dianalisis bahwa pitch rate dengan skema B lebih lama mempertahankan sikap vertikal dibandingkan dengan pitch rate dengan skema E, yang terlihat lebih cepat menuju posisi horizontal. Walaupun kondisi theta akhirnya tidak jauh berbeda, namun perbedaan kecepatan perubahan sikap dari vertikal ke horizontal akan mempengaruhi prestasi peluncuran roket Polyot.
Dari gambar 5.4 dan 5.5 dapat dilihat bahwa skema dengan perubahan sikap dari vertikal ke horizontal yang lebih lambat akan lebih cenderung memiliki kecepatan vertikal yang lebih besar dibandingkan dengan skema yang lebih cepat menuju sikap horizontal. Sebaliknya terjadi pada kecepatan horizontalnya. Oleh karena itu, skema yang lebih cepat menuju sikap horizontal akan memiliki kecepatan horizontal akhir yang lebih besar, yang kemudian akan digunakan sebagai kecepatan orbital.
Dari gambar 5.6, 5.7 dan 5.8 dapat dilihat bahwa skema D akan memiliki jarak horizontal yang lebih jauh, namun harga parameter ketinggiannya tidak akan memiliki perbedaan yang terlalu jauh dengan skema lainnya.
Dari gambar 5.9 dapat dilihat bahwa skema D lebih cepat bergerak pada sumbu horizontal dibandingkan dengan skema lainnya yang memakan waktu lama dalam bergerak pada arah vertikal.
Dari gambar 5.10 dapat dilihat bahwa untuk setiap skema-skema di atas harga sudut delta tidak akan memiliki perbedaan yang mencolok. Hal ini disebabkan oleh tidak adanya perubahan yang drastis terhadap theta pada setiap skema.
5.6.2 Hasil Simulasi untuk Seluruh Fase Peluncuran
Hasil simulasi dengan menerapkan pitch program yang berbeda-beda terhadap keselurahan fase peluncuran dapat dilihat melalui gambar-gambar berikut:
7 127 415 550 1200 -20 0 20 40 60 80 100 120 140 160 180 time (s) tet a ( degr ee) Skema A Skema B Skema C Skema D Skema E
Gambar 5-11. Grafik theta vs time (all)
-7 -6 -5 -4 -3 -2 -1 0 x 106 0 1 2 3 4 5 6 7 8x 10 5 Distance (m) H ei ght ( m ) Skema A Skema B Skema C Skema D Skema E Gambar 5-12. Gravik Z vs X 7 127 415 550 1200 -40 -20 0 20 40 60 80 100 time (s) gam m a ( de g) Skema A Skema B Skema C Skema D Skema E Fase Orbital
Gambar 5-13. Grafik gamma vs time (all)
7 127140 415 550 1200 -7 -6 -5 -4 -3 -2 -1 0 1 time (s) de lt a ( de g) Skema A Skema B Skema C Skema D Skema E 1 2 3
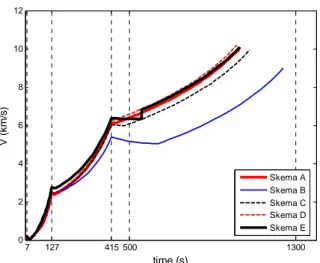
7 127 415 500 1300 0 2 4 6 8 10 12 time (s) V ( k m /s ) Skema A Skema B Skema C Skema D Skema E
Gambar 5-15. Grafik V vs time (all)
Dari gambar 5.11 dapat dilihat perubahan theta yang terjadi sepanjang fase peluncuran untuk setiap pitch rate schedulling yang berbeda. Kondisi akhir setiap skema sama, yaitu 1800, namun yang berbeda adalah kecepatan tiap-tiap skema dalam mencapai kondisi akhir tersebut (horizontal).
Dari gambar 5.12 dapat dilihat bahwa skema B yang lebih lama mencapai sikap horizontal akan memiliki tinggi akhir yang jauh lebih tinggi. Namun pencapaian tersebut bukan berarti skema B tersebut jauh lebih unggul, karena untuk mendapatkan lintas orbital yang diinginkan diperlukan satu parameter lagi, yaitu kecepatan.
Dapat dilihat pada pada gambar 5.15 bahwa skema B justru menghasilkan kecepatan akhir yang jauh di bawah kecepatan akhir dari skema lainnya. Hal ini diakibatkan oleh energi gaya dorong pada skema B lebih banyak digunakan untuk menambah ketinggian, sehingga kecepatan yang dihasilkan tidak besar.
Pada gambar 5.13 dapat dilihat bahwa semua skema memiliki tujuan akhir yang sama, yaitu sudut lintas terbang (γ) yang mendekati nol. Hal ini dilakukan agar memudahkan proses injeksi payload pada lintas orbit yang diinginkan dan untuk memudahkan proses penambahan kecepatan dalam mencapai kecepatan orbital yang dibutuhkan.
Pada gambar 5.16 dapat dilihat sudut gaya dorong yang terjadi selama fase peluncuran. Pada fase pembakaran tingkat pertama terjadi harga yang terbesar. Hal ini dikarenakan pada fase tersebut terjadi perubahan sikap roket yang cukup besar.
Namun begitu harganya cukup kecil, hal ini terjadi karena gaya dorong yang dihasilkan amat besar sehingga menimbulkan momen gaya dorong yang besar pula.
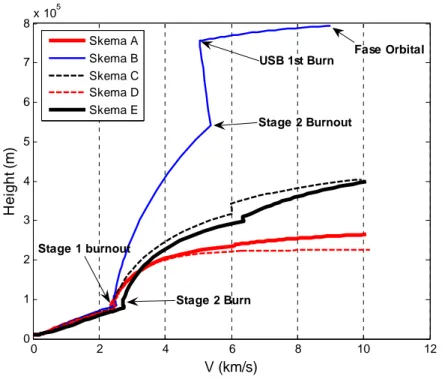
0 2 4 6 8 10 12 0 1 2 3 4 5 6 7 8x 10 5 V (km/s) He ig h t ( m ) Skema A Skema B Skema C Skema D Skema E Stage 1 burnout Stage 2 Burn Stage 2 Burnout
USB 1st Burn Fase Orbital
Gambar 5-16. Grafik H vs V
Pada gambar 5.16 di atas dapat dilihat pencapaian ketinggian dan kecepatan untuk tiap skema. Data-data pencapaian akhir tiap skema disajikan dalam tabel berikut:
Tabel 5-1. Kondisi akhir peluncuran
Skema V GTO (km/s) H GTO (km) H Apocenter (km) Fuel Sisa (kg) Waktu (s) Max Payload (kg) A 10.07 264.5 29690 3.39 1035 803.39 B 8.988 804.2 12460 3.39 1240 803.39 C 9.937 411.2 31790 3.39 1080 803.39 D 10.18 223 34490 3.39 1017.5 803.39 E 10.08 394.4 35950 155.79 1031.7 955.79
Dari tabel 5.1 di atas dapat dilihat ketinggian dan kecepatan akhir yang diperoleh oleh tiap skema. V GTO dan H GTO adalah kondisi kecepatan dan ketinggian setelah fase pembakaran roket tingkat ketiga yang pertama. Dengan kondisi ketinggian dan kecepatan tersebut, roket akan melanjutkan peluncuran dengan mengikuti lintas terbang orbital GTO (tanpa gaya dorong). Harga V dan H GTO adalah harga kecepatan dan ketinggian pada titik pericenter dari lintas orbit GTO. Titik apocenter dari GTO akan menjadi ketinggian orbit sikular dari roket setelah dilakukan penambahan kecepatan secara impulsif.
Terlihat bahwa hanya skema E yang mampu mendapatkan ketinggian lintas orbit GEO (mencapai 36000 km). Skema lainnya belum bisa mendapatkan kecepatan akhir orbital sesuai dengan ketinggian orbit GTO-nya. Setelah mencapai pericenter
orbit GTO, roket dengan skema E memiliki sisa bahan bakar yang cukup besar, sehingga kelebihan berat tersebut dapat digunakan untuk menambah berat payload.
Pada tabel di atas terlihat bahwa skema B yang menempuh ketinggian paling besar menempuh seluruh fase peluncuran dengan waktu yang lebih lama.
5.6.3 Hasil Simulasi dengan Variasi Arah Horizontal
Simulasi juga dilakukan dengan memvariasikan arah horizontal akhir dari roket Polyot, yaitu dengan sudut akhir 1800 (seperti simulasi sebelumnya) dan sudut akhir 00. Skema pitch rate yang digunakan seperti berikut:
0 20 40 60 80 100 120 140 -3 -2 -1 0 1 2 3 4 5 6 Time (s) P it c h r at e (deg /s ) Skema E Skema F
Skema F adalah skema pitch rate yang akan membuat rokat menuju sikap horizontal 0 (nol) derajat. Hasil simulasi dengan skema tersebut adalah sebagai berikut:
7 127 415 550 1200 -20 0 20 40 60 80 100 120 140 160 180 time (s) te ta (d e g re e ) Skema E Skema F
Gambar 5-17. Grafik theta vs time
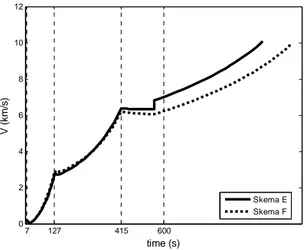
-8 -6 -4 -2 0 2 4 6 8 x 106 0 1 2 3 4 5 6 7 8x 10 5 Distance (m) H ei ght ( m ) Skema E Skema F Gambar 5-18. Grafik Z vs X 7 127 415 600 0 2 4 6 8 10 12 time (s) V ( k m /s ) Skema E Skema F
Gambar 5-19. Gravik V vs time
7 127 415 550 1200 -40 -20 0 20 40 60 80 100 time (s) ga m m a ( d eg ) Skema E Skema F Fase Orbital
Gambar 5-20. Grafik gamma vs time
7 127140 415 550 1200 -8 -6 -4 -2 0 2 4 6 time (s) de lt a ( d eg ) Skema E Skema F 1 2 3
Dari gambar 5.16 dapat dilihat perubahan sudut theta pada skema F yang semakin menuju sudut 00 pada akhir peluncurannya. Pengaruhnya dapat dilihat pada gambar 5.17 yang menunjukkan bahwa skema F akan menempuh ketinggian yang lebih tinggi, kecepatan akhir yang dapat ditempuhnya pun tidak jauh berbeda, namun roket dengan skema F harus menempuhnya dengan waktu yang lebih lama, seperti terlihat melalui gambar 5.18.
Pada grafik 5.19 dapat dilihat bahwa kedua skema memiliki kecenderungan untuk menuju ke sudut lintas terbang mendekati nol. Sedangkan pada grafik 5.20 dapat dilihat perbedaan besar sudut delta yang terjadi pada fase roket dengan skema E dan F. 0 2 4 6 8 10 12 0 1 2 3 4 5 6x 10 5 V (km/s) H ei ght ( m ) Skema E Skema F Stage 1 burnout Stage 2 Burn Stage 2 Burnout USB 1st Burn Fase Orbital Gambar 5-22. Grafik Z vs V
Tabel 5-2. Kondisi akhir peluncuran Skema V GTO (km/s) H GTO (km) H Apocenter (km) Fuel Sisa (kg) Waktu (s) Max Payload (kg) E 10.17 281.5 35950 70 1022 870 F 9.931 572.3 35800 56.69 1153.6 856.69
Dari tabel 5.2 dapat dilihat bahwa roket dengan kecenderungan menuju sikap horizontal 00 juga dapat mengantarkan payload hingga GTO dengan tinggi apocenter yang merupakan tinggi orbit sirkular GEO, namun waktu yang diperlukan untuk menempuh seluruh fase peluncuran lebih lama.
Kesimpulan dari analisis hasil simulasi gerak wahana peluncur Polyot diberikan pada Bab 6.