SENSOR ULTRASONIK PING))) PARALLAX
Disusun untuk memenuhi Tugas Mata Kuliah Sistem Instrumentasi FisikaDosen Pengampu: Dr. Hendro
Oleh:
Fairusy Fitria Haryani / 20215008
Restu Lestari / 20215009
Yulianto Agung Rezeki / 20215010
MAGISTER FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT TEKNOLOGI BANDUNG
i DAFTAR ISI
Halaman
DAFTAR ISI ... i
DAFTAR GAMBAR ... ii
DAFTAR TABEL ... iii
DAFTAR LAMPIRAN ... iv BAB 1 PENDAHULUAN ... 1 1.1. Latar Belakang ... 1 1.2. Rumusan Masalah ... 2 1.3. Tujuan ... 2 1.4. Batasan Masalah ... 2
BAB II TINJAUAN PUSTAKA ... 3
2.1. Sensor Ultrasonic Ping))) Parallax... 3
2.2. Sensor Suhu LM35 ... 6
2.3. Arduino Uno ATmega328 ... 7
2.4. Oven Listrik Kirin 9 L ... 9
BAB III METODOLOGI ... 11
3.1. Perancangan Sistem Pengukuran Jarak ... 11
3.2. Perancangan Sistem Interface Pengukuran Jarak ... 12
3.3. Diagram Alir Kerja Pengukuran Jarak ... 12
BAB IV HASIL DAN DISKUSI ... 14
4.1. Rancang Bangun Sistem Pengukuran Jarak ... 14
4.2 Tampilan Sistem Pengukuran Jarak ... 15
4.3 Pengujian ... 16 BAB V PENUTUP ... 20 5.1 Kesimpulan ... 20 5.2 Saran ... 20 DAFTAR PUSTAKA ... 21 LAMPIRAN ... 22
ii
Gambar 2.1 Sensor Ultrasonik PING))) Parallax ... 3
Gambar 2.2 Prinsip kerja sensor ultrasonik ... 4
Gambar 2.3 Rangkaian Pemancar Gelombang Ultrasonik ... 5
Gambar 2.4 Rangkaian Penerima Gelombang Ultrasonik ... 6
Gambar 2.5 Sensor Suhu LM35 ... 6
Gambar 2.6 Arduino Uno ATMega328 ... 7
Gambar 2.7 Oven Listrik Kirin 9 L ... 10
Gambar 3.1 Skema Perancangan Sistem Pengukuran Jarak ... 11
Gambar 3.2 Diagram Blok Perancangan Sistem Pengukuran Jarak ... 12
Gambar 3.3 Diagram Blok Sistem Interface Pengukuran Jarak pada LabView ... 12
Gambar 3.4 Diagram Alir Kerja Pengukuran Jarak ... 13
Gambar 4.1 Sistem Pengukuran jarak dengan Sensor Ultrasonik ... 14
Gambar 4.2 Tampilan Sistem Pengukuran Jarak ... 15
iii
DAFTAR TABEL
Halaman Tabel 4.1 Komponen Utama Pengukuran Jarak ... 14
Tabel 4.2 Hasil Pengukuran Jarak dengan Perubahan Suhu tanpa Faktor Koreksi ... 17 Tabel 4.3 Hasil Pengukuran Jarak dengan Perubahan Suhu dengan Faktor Koreksi ... 17
iv
Lampiran 1 Solusi Analitik ... 22
Lampiran 2 Datasheet Sensor LM35 ... 23
Lampiran 3 Datasheet Sensor PING))) Parallax ... 25
1 BAB I PENDAHULUAN
1.1 Latar Belakang
Sensor ultrasonik merupakan salah satu tipe sensor yang sering digunakan, khususnya dalam aplikasi pengukuran jarak. Berbagai alat yang menggunakan dasar pengukuran jarak diantaranya sistem pengukuran kecepatan, kedalaman, ketinggian, hingga sistem kompleks seperti teknologi keamanan mobil. Tidak hanya itu, beberapa alat pengukuran dengan menggunakan jenis sensor ini sering kali digabungkan dengan sensor lainnya sehingga mampu menghasilkan berbagai jenis teknologi lainnya.
Prinsip dasar dari sensor ini adalah mengeluarkan sederet pulsa yang mengenai objek dan selanjutnya akan dipantulkan dan diterima oleh transduser sensor (Susanto, dkk, 2007: 19). Karena gelombang elektromagnetik yang dipantulkan merambat dalam medium, sehingga pulsa yang dihasilkan ditentukan oleh kecepatan rambat bunyi di medium, hasil pantulan oleh objek dan posisi sudut objek yang diukur. Jika medium rambatnya adalah udara, besarnya kecepatan rambat bunyi sangat ditentukan oleh kondisi udara di lingkungan.
Pada umumnya kecepatan rambat bunyi di udara pada suhu dan tekanan standar adalah 344 m/s (Wikipedia, 2016). Namun, untuk banyak kasus yang melibatkan perubahan suhu pada ruang tertutup akan menyebabkan perubahan pada kecepatan rambat bunyi di udara. Perubahan kecepatan rambat bunyi diprediksi akan menyebabkan gangguan pada laju aliran gelombang elektromagnetik yang merambat dan secara langsung akan berpengaruh terhadap hasil pengukuran.
Rentang suhu udara untuk sensor ultrasonik jenis PING))) Parallax, yaitu 0-700 C. Sedangkan untuk tipe Generic HC SR04 yaitu 0-600C. Pada batasan suhu tersebut akan dilakukan pengukuran jarak oleh sensor ultrasonik dan dikembangkan sistem pengukuran yang memungkinkan perubahan suhu lingkungan dengan bantuan sensor suhu yang selanjutnya data ditampilkan dan disimpan dalam komputer.
Dalam penelitian ini, sensor Ultrasonik yang digunakan yaitu sensor PING))) Parallax dan variabel yang difokuskan yaitu variasi suhu. Sistem unit pemrosesan data menggunakan Arduino Uno ATMega328 sedangkan sistem interface pada komputer digunakan LabView. Diharapkan dengan adanya sistem yang dikembangkan mampu melakukan pengukuran jarak dengan tingkat akurasi dan presisi yang cukup baik.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, maka permasalahan yang akan diselesaikan dalam penelitian adalah sebagai berikut:
a. Apakah terdapat pengaruh suhu terhadap pengukuran jarak sensor ultrasonic PING)))?
b. Bagaimana merancang simulasi untuk koreksi pengaruh suhu dalam pengukuran jarak?
1.3 Tujuan
Tujuan dari penelitian ini adalah:
a. Mengetahui adanya pengaruh suhu terhadap pengukuran jarak sensor ultrasonic PING)))
b. Merancang simulasi untuk koreksi pengaruh suhu dalam pengukuran jarak. 1.4 Batasan Masalah
Adapun batasan masalah dalam penelitian ini adalah sebaagai berikut: a. Sensor jarak yang digunakan adalah sensor ultrasonik PING))) Parallax. b. Suhu maksimum pengukuran adalah 600C.
c. Pengukur suhu yang digunakan adalah sensor suhu LM35.
d. Unit pemrosesan sistem yang digunakan adalah Arduino Uno ATMega328. e. Sistem interface dibuat dengan menggunakan perangkat lunak LabVIEW. f. Variasi pengukuran yaitu suhu dan jarak.
3 BAB II
TINJAUAN PUSTAKA
2.1 Sensor Ultrasonik PING))) Parallax
Sensor Ultrasonik PING))) Parallax adalah sensor yang menggunakan gelombang ultrasonik untuk mengukur jarak. Sensor Sensor Ultrasonik PING))) Parallax ini dapat memberikan pengukuran yang tepat pada rentang jarak 2 cm sampai 3 meter. Sensor ini sangat mudah dihubungkan dengan mikrokontroler. Cara kerja sensor ini yaitu dengan cara mengirimkan sinyal pada rentang frekuensi tertentu yang akan menumbuk benda (yang diukur jaraknya) kemudian dipantulkan dan ditangkap kembali oleh Sensor Ultrasonik PING))) Parallax, seperti tampak pada Gambar 2.1. Perhitungan jarak yang diukur dengan menggunakan sensor ini yaitu :
𝐽𝑎𝑟𝑎𝑘 =𝑊𝑎𝑘𝑡𝑢 × 𝑘𝑒𝑐𝑒𝑝𝑎𝑡𝑎𝑛
2 =
𝑡 × 𝑣
2 ... (1)
Gambar 2.1 Sensor Ultrasonik PING))) Parallax
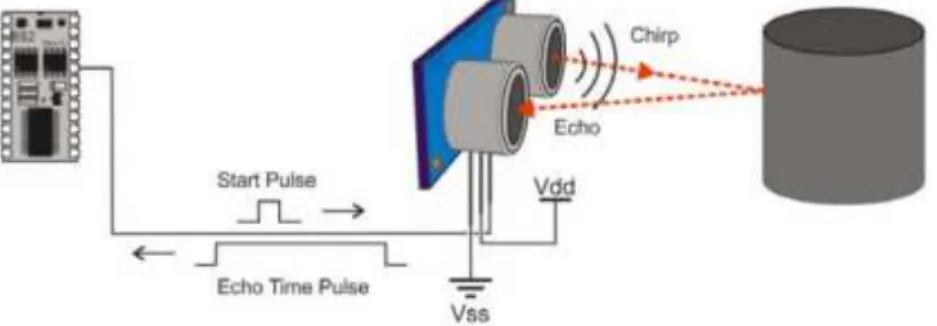
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar (Delta Agus, 2008:11). Sensor ultrasonik PING))) Parallax mendeteksi jarak objek dengan pengaturan mikro kontroler. Dengan pengaturan ini sensor memancarkan gelombang ultrasonik pendek dengan panjang 40 kHz. Gelombang ini merambat melalui udara. Ketika menumbuk sebuah benda, gelombang kemudian dipantulkan kembali pada sensor. Sensor ultrasonik PING))) Parallax menghasilkan sinyal keluaran untuk sistem komputer yang akan berakhir
ketika gema terdeteksi. Lebar dari sinyal yang dihasilkan sesuai dengan jarak ke target. Prinsip kerja dari sensor ultrasonik dapat dilihat pada Gambar 2.2.
Gambar 2.2 Prinsip Kerja Sensor Ultrasonik
Secara lebih jelas, prinsip kerja sensor ultrasonik, dapat dijelaskan sebagai berikut:
a. Sinyal dipancarkan oleh pemancar ultrasonik. berfrekuensi diatas 20kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
b. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi (v) yang berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
c. Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus:
S= v/∆t ... (2)
d. karena jarak yang ditempuh merupakan setengah dari waktu tempuh gelombang maka menjadi:
S=340. ∆t/2 ... (3)
dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan ∆t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
Adapun spesifikasi dari Sensor Ultrasonik PING))) Parallax adalah sebagai berikut (Parallax, 2016).
a. Tegangan : 5 volt b. Arus : 30mA c. Frekuensi : 40 kHz.
5
d. Jarak maksimum : 3 m e. Jarak minimum : 2 cm f. Sudut pengukuran : 15o
g. Beroperasi pada temperature : 0 - 70oC
h. Ukuran : 22 mm x 46 mm x 16 mm i. Berat : 9 gram
Sensor ultrasonik PING))) Parallax dapat mendeteksi permukaan air. Namun, tidak dapat digunakan untuk pengukuran diluar ruangan atau penggunaan terus-menerus di lingkungan yang basah. Temperatur udara atau suhu memiliki pengaruh pada kecepatan suara di udara yang dapat diukur oleh sensor ini, dengan perhitungan kecepatan sebagai berikut.
273
7 , 415 c ... (4)Sensor ultrasonik memiliki tiga macam bagian utama yang berfungsi vital dalam melakukan penyensoran. Ketiga bagian tersebut dijelaskan pada rincian berikut.
a. Piezoelektrik
Peralatan piezoelektrik secara langsung mengubah energi listrik menjadi energi mekanik. Tegangan input yang digunakan menyebabkan bagian keramik meregang dan memancarkan gelombang ultrasonik. Karena kelebihannya inilah maka tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik.
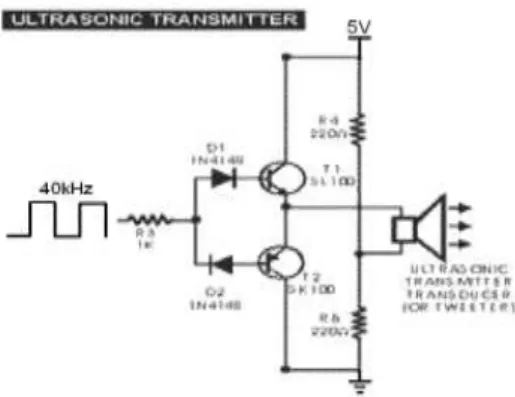
b. Transmitter
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz. Pemancar ini menggunakan sebuah transducer transmitter ultrasonik.
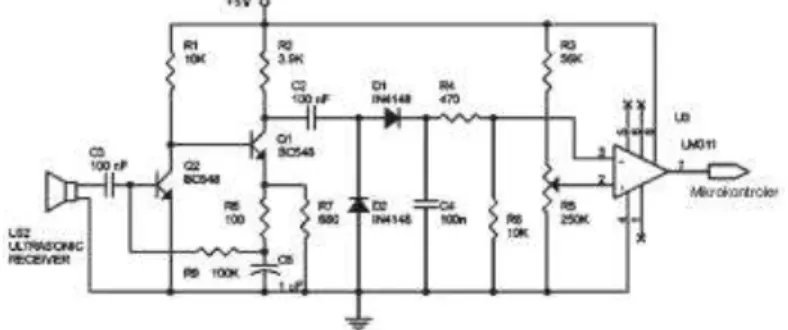
c. Receiver
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan (Aditya Prabhandita, 2012).
Gambar 2.4 Rangkaian Penerima Gelombang Ultrasonik
2.2 Sensor Suhu LM35
Sensor suhu LM35 adalah sensor yang dibuat dengan menggunakan bahan yang sensitif terhadap perubahan suhu. Tampilan sensor LM35 yang digunakan seperti pada Gambar 2.3.
Gambar 2.5 Sensor Suhu LM35
Perubahan suhu mengakibatkan perubahan hambatan. Dengan mnggunakan prinsip pembagi tegangan, maka perubahan suhu tersebut akan sebanding dengan perubahan tegangan keluaran. (Hendro, 2014). Sensor suhu LM35 mempunyai spesifikasi sebagai berikut.
a. Memiliki sensitivitas suhu, dengan faktor skala yang linier antara tegangan dan suhu yaitu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
7
b. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5 ºC pada suhu 25 ºC. c. Pengukuran suhu dapat diakukan antara -55 ºC sampai +150 ºC.
d. Bekerja pada tegangan 4 volt sampai 30 volt. e. Memiliki arus rendah yaitu kurang dari 60 µA.
f. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
g. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA. h. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
2.3 Arduino Uno ATmega328
Arduino Uno adalah papan mikrokontroler yang didasarkan pada ATmega328 (datasheet). Arduino Uno memiliki 14 digital pin input/output (6 diantaranya dapat digunakan sebagai output PWM ), 6 input analog, sebuah osilator kristal 16 MHz, koneksi USB, sebuah power jack, sebuah ICSP header, dan tombol reset. Arduino Uno berisi semua yang diperlukan untuk mendukung mikrokontroler, mudah menghubungkannya ke komputer dengan kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau baterai untuk memulainya. (Hendro, 2014).
Arduino Uno berbeda dari semua papan mikrokontroler sebelumnya yaitu tidak menggunakan chip driver FTDI USB-to-serial. Sebaliknya, fitur Atmega8U2 diprogram sebagai konverter USB-to-serial. Kata "Uno" diambil dari bahasa Italia yang mempunyai arti satu yang berarti menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan menjadi versi referensi untuk Arduino selanjutnya.
Gambar 2.6 Arduino Uno ATMega328 Adapun spesifikasi arduino uno adalah sebagai berikut. a. Mikrokontroler : ATmega328
b. Tegangan Operasi : 5 V
d. Batas tegangan masukkan : 6-20 V
e. Jumlah pin I/O Digital: 14 (6 diantaranya memberikan output PWM ) f. Jumlah pin Input Analog: 6
g. Arus DC tiap pin I/O : 40 mA h. Arus DC untuk pin 3.3V : 50 mA
i. Memory Flash: 32 KB yang 0,5 KB digunakan oleh bootloader j. SRAM : 2 KB
k. EEPROM : 1 KB l. Clock Speed : 16 MHz
Arduino Uno dapat didukung melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Daya ksternal (non-USB) dapat berasal baik dari adaptor AC ke DC atau baterai.
Arduino Uno dapat beroperasi pada masukan eksternal dari 6 sampai 20 volt. Jika disuplai kurang dari 7 volt Arduino Uno akan menjadi tidak stabil. Jika menggunakan lebih dari 12V, pengatur tegangan bisa panas dan merusak papan Arduino Uno. Tegangan masukan yang disarankan adalah 7 sampai 12 volt.
Arduino Uno ATmega328 memiliki kapasitas memori sebesar 32 KB untuk menyimpan kode (dengan 0,5 KB digunakan untuk bootloader). Selain itu juga memiliki 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis dengan EEPROM library).
Masing-masing dari 14 pin digital pada Uno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Pin ini beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-up internal yang (terputus secara default) dari 20-50 KOhms.
Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. Arduino Uno ATmega328 menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah ATmega8U2 pada saluran komunikasi muncul sebagai virtual com port untuk perangkat lunak pada komputer. 8U2 firmware
9
menggunakan USB standar driver COM, dan tidak ada driver eksternal yang dibutuhkan. Namun, pada Windows, file *.inf diperlukan.
Perangkat lunak Arduino termasuk serial monitor memungkinkan data tekstual sederhana dikirim ke dan dari papan Arduino. LED RX dan TX di papan akan berkedip ketika data sedang dikirimkan melalui USB ke serial chip dan koneksi USB ke komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). Arduino Uno juga dirancang dengan cara yang memungkinkan untuk diatur ulang oleh perangkat lunak yang berjalan pada komputer yang terhubung.
Arduino Uno memiliki polyfuse reset yang melindungi port USB komputer Anda dari arus pendek dan kelebihan arus. Meskipun kebanyakan komputer memberikan perlindungan internal mereka sendiri, sekering memberikan lapisan tambahan perlindungan. Jika lebih dari 500 mA yang disuplai ke port USB, sekering otomatis akan memutus sambungan sampai arus pendek atau kelebihan arus tidak ada.
Ukuran Arduino Uno memiliki panjang maksimum dan lebar PCB yaitu 2,7 dan 2,1 inci masing-masing, dengan konektor USB dan power jack diperbesar melebih dimensi sebelumnya. Tiga lubang sekrup memungkinkan papan terpasang ke permukaan atau kotak.
2.4 Oven Listrik Kirin 9 L
Pada percobaan ini dibutuhkan alat bantuan yaitu oven listrik. Oven listrik yang digunakan pada percobaan ini adalah oven listrik dengan merek Kirin berkapasitas 9 liter. Oven yang biasa digunakan untuk memasak atau memanaskan makanan ini difungsikan sebagai chamber (ruang tertutup) untuk melakukan pengukuran suhu.
Dengan bantuan oven listrik ini mempermudah proses kenaikan suhu udara pada ruangan. Oven listrik ini terbuat dari bahan stainless steel. Membutuhkan daya 300-600 Watt untuk mengoperasikannya. Pada oven ini terdapat lampu indikator dan tombol pengatur waktu.
11 BAB III METODOLOGI
3.1 Perancangan Sistem Pengukuran Jarak
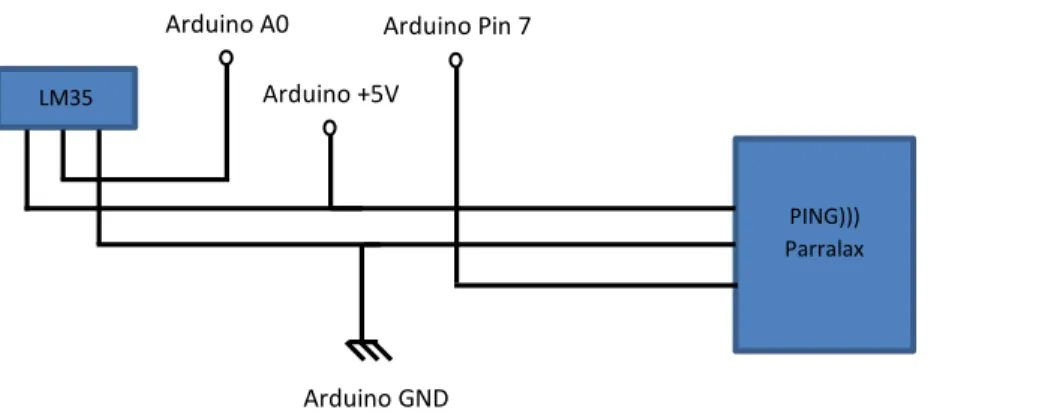
Perancangan sistem pengukuran jarak dalam penelitian ini dimulai dengan membuat skematik rangkaian terlebih dahulu. Gambar 3.1 menunjukkan skematik rangkaian yang digunakan untuk merancang pengukuran jarak.
Gambar 3.1 Skematik Perancangan Sistem Pengukuran Jarak.
Sensor LM35 berperan sebagai input suhu pada sensor ultrasonik yang diproses oleh Arduino. Perubahan suhu yang terjadi diakibatkan oleh adanya oven listrik yang sudah dilengkapi kontrol suhu. Karena pengukuran yang dilakukan dalam ruang tertutup diharapkan suhu oleh lingkungan tidak terpengaruhi oleh sistem diluar lingkungan.
Hasil keluaran dari sensor LM35 merupakan masukan untuk sensor ultrasonik yang diproses oleh Arduino untuk selanjutnya didapatkan keluaran digital. Dalam sistem pemrosesan oleh Arduino diperlukan solusi analitik supaya didapatkan hubungan output sensor LM35 sebagai input pada sensor ultrasonik, seperti pada Lampiran 1.
Selanjutnya supaya hasil keluaran digital dapat diproses dengan mudah dan efisien, diperlukan perangkat lunak yang berperan dalam menampilkan hasil pembacaan oleh Arduino. Pada penelitian ini, digunakan perangkat lunak LabVIEW untuk membaca keluaran Arduino dan menampilkannya dalam sistem interface yang dibuat. Script Arduino sistem pengukuran jarak dapat dilihat pada
Arduino +5V
Arduino GND Arduino A0 Arduino Pin 7
PING))) Parralax LM35
Lampiran 4. Secara keseluruhan, digram blok perancangan pengukuran jarak seperti Gambar 3.2.
Gambar 3.2. Diagram Blok Perancangan Sistem Pengukuran Jarak. 3.2 Perancangan Sistem Interface Pengukuran Jarak
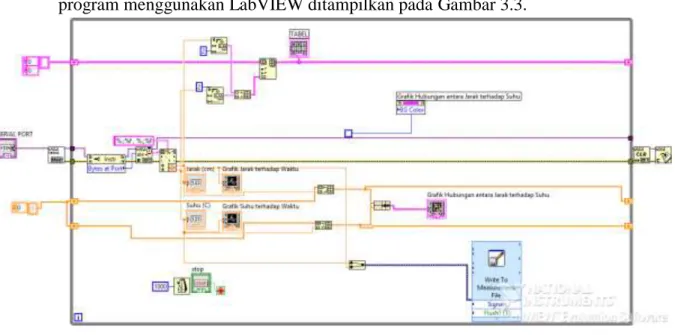
Hasil keluaran Arduino ditampilkan melalui sistem interface yang dirancang menggunakan perangkat lunak LabVIEW. Selain bentuk tampilan tabel yang memuat hasil pengukuran jarak dan suhu tiap waktunya, hasil keluaran pada LabVIEW juga menampilkan grafik hubungan perubahan suhu yang mengakibatkan besarnya pengukuran jarak juga berubah. Dengan demikian akan memudahkan pembacaan perubahan suhu dan jarak tiap waktunya. Diagram blok program menggunakan LabVIEW ditampilkan pada Gambar 3.3.
Gambar 3.3. Diagram Blok Sistem Interface Pengukuran Jarak pada Labview. 3.3 Diagram Alir Kerja Pengukuran Jarak
Diagram alir merupakan landasan algoritma penulis dalam membuat tahapan kerja program sistem perancangan pengukuran jarak. Sinyal analog yang masuk ke
Arduino LabVIEW
LM35 PING)))
Unit Masukan Unit Pemroses UnitKeluaran
USB ADC
13
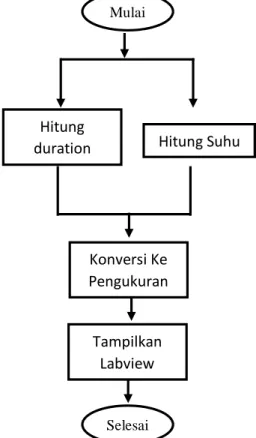
Arduino selanjutnya diubah menjadi sinyal digital. Input dari sensor ultrasonik yaitu hasil pengukuran suhu oleh sensor LM35 yang dikonversikan oleh Arduino. Diagram alir dari pengukuran jarak yang dibuat, seperti pada Gambar 3.4.
Gambar 3.4 Diagram alir kerja pengukuran jarak
Mulai
Hitung
duration Hitung Suhu
Konversi Ke Pengukuran
Tampilkan Labview
14
Sistem pengukuran jarak yang dirancang dan dibangun merupakan sistem pengukuran jarak yang dilakukan dalam sistem suhu yang tidak konstan. Hal ini dilakukan karena salah satu prinsip dasar pengukuran jarak dengan sensor ultrasonik adalah gelombang yang merambat dalam medium udara, sehingga perubahan suhu pada medium menyebabkan besarnya kecepatan bunyi di udara juga berubah. Oleh karena itu besarnya jarak yang diukur perlu disesuaikan dengan perubahan suhu lingkungan. Tabel 4.1 menampilkan daftar komponen utama yang digunakan pada pembuatan pengukuran jarak dalam penelitian ini.
Tabel 4.1 Komponen Utama Pengukuran Jarak
No Nama Fungsi
1 PING))) PARALLAX Sensor Ultrasonik 2 Arduino Uno ATMega328 Unit Pemroses
3 LM35 Sensor Suhu
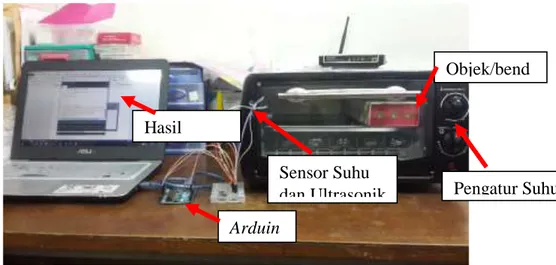
Adapun gambar lengkap sistem pengukuran jarak ditampilkan pada Gambar 1.
Gambar 4.1. Sistem Pengukuran Jarak dengan Sensor Ultrasonik.
Gambar 4.1 menampilkan Rangkaian sistem pengukuran jarak yang telah dibuat. Oven listrik dengan ukuran 9L dilengkapi dengan pengatur suhu. Sensor suhu diletakkan didalam sistem (oven) dengan posisi yang berdekatan dengan sensor ultrasonik untuk memperkecil faktor kesalahan dalam pengukuran suhu.
Sensor Suhu
dan Ultrasonik Pengatur Suhu Arduin o Hasil Output Objek/bend a
15
Proses pengukuran jarak dan suhu sistem dilakukan selama 10 menit untuk mencapai suhu maksimum dari range suhu yang diatur pada oven, yaitu 55-570C. Setelah 10 menit, maka akan terdengar bunyi klik dari oven yang menandakan bahwa pengukuran selesai dan suhu sistem akan berangsur turun. Selama proses tersebut dilakukan pencatatan suhu dan jarak selama 10 detik dan ditampilkan grafik kenaikan suhu dan hasil pengukuran tiap waktunya serta grafik hubungan antara kenaikan suhu dan pengukuran jarak.
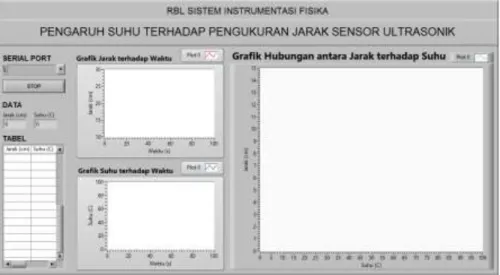
4.2 Tampilan Sistem Pengukuran Jarak
Pada penelitian ini, sistem pengukuran jarak divariasikan dengan perubahan suhu. Sehingga, hasil pembacaan jarak sudah merupakan fungsi suhu. Suhu merupakan salah stau faktor yang mempengaruhi pembacaan skala jarak, karena suhu berperan dalam menentukan cepat/lambatnya waktu pemancaran dan pemantulan gelombang.
Pada umumnya sistem pengukuran jarak dirangkai tanpa mempertimbangkan perubahan suhu. Sistem pengukuran jarak yang dirangkai menampilkan perubahan suhu tiap waktunya dan bagaimana pengaruhnya terhadap jarak dalam bentuk grafik sehingga akan memudahkan pembacaan. Pencatatan pengukuran sudah tersimpan otomatis dalam bentuk .exc sehingga memudahkan untuk membuat dan menyimpan dalam grafik, karena grafik yang dibaca saat pengukuran tidak dapat disimpan. Gambar 4.2 menampilkan sistem pengukuran jarak yang telah dibuat menggunakan LabVIEW.
4.3 Pengujian
Pengujian dilakukan dengan tiga kali percobaan yang pertama pengujan tanpa menyalakan oven listrik (suhu tetap), kedua menvariasikan nilai suhu pada oven listrik namun tanpa memasukkan faktor koreksi suhu dan percobaan ketiga dengan memasukkan faktor koreksi suhu pada pengaturan arduino uno. Selanjutnya program dijalankan dan ditampilkan pada Labview. Berikut data hasil pengukuran yang didapatkan dari pengujian.
a. Data pengukuruan panjang pada suhu tetap
Pada percobaan pertama Sensor Ultrasonic Ping))) Parallax ditempatkan pada oven listrik dan benda ditempatkan pada jarak 16,8 cm dari sensor. Namun, oven listrik tidak dihidupkan (suhu tetap). Sensor mengukur jarak benda pada suhu tetap yaitu 28,32oC. Dari percobaan ini didapatkan 129 data, dengan rentang pengukuran jarak antara 16,68 cm sampai 16,86 cm. Data hasilpengukuranjarak ini kemudian dihitung rata-ratanya dan didapatkan hasil rata-rata pengukuran jarak sebesar 16,71535 cm. Data ini menyimpang sebesar 0,503 % dari jarak seharusnya yaitu 16,8 cm.
b. Data pengukuruan panjang dengan perubahan suhu tanpa koreksi
Pada percobaan kedua Sensor Ultasonic Ping))) Parallax dan benda ditempatkan seperti pada percobaan pertama. Oven listrik kemudian dinyalakan dan suhu naik secara perlahan-lahan. Pada percobaan ini data pengukuran diambil dengan perubahan suhu, namun tanpa memasukkan faktor koreksi pada pengaturan di sofware arduino uno. Dari pengukuran dengan rentang suhu 29,3oC sampai 58,59oC didapatkan data sebanyak 266. Namun, pada pembahasan ini penulis hanya mengambil sampel pada rentang suhu yang sama. Hal ini dimaksudkan untuk mengetahui perbedaan hasil pengukuran pada percobaan pengukuran jarak tanpa faktor koreksi dibandingkan dengan pengukuran jarak dengan memasukan faktor koreksi pada pengaturan arduino uno. Berikut data hasil pengukuran pada percobaan kedua.
17
Tabel 4.2. Hasil Pengukuran Jarak dengan Perubahan Suhu tanpa Faktor Koreksi
c. Data pengukuruan panjang dengan perubahan suhu tanpa koreksi
d. Dengan prosedur yang sama dengan percobaan kedua, pada percobaan ketiga ini data pengukuran diambil dengan memvariasikan suhu dan memasukkan faktor koreksi pada pengaturan disofware arduinouno. Dari pengukuran dengan rentang suhu 30,27oC sampai 55,56oC didapatkan data sebanyak 190. Berikut
data hasil pengukuran pada percobaan ketiga.
Tabel 4.3 Hasil Pengukuran Jarak dengan Perubahan Suhu dengan Faktor Koreksi
Dari ketiga data tersebut dapat dianalisis bahwa pengukuran jarak dengan perubahan suhu yang dimasukkan faktor koreksi memiliki nilai kesalahan (error) yang lebih kecil dibandingkan dengan data pengukuran jarak dengan perubahan
Suhu (oC) Jarak (cm) Rata-rata
Jarak (cm) Error (%) 30,76 16,64 16,47 1,45 30,76 16,59 30,76 16,19 40,53 16,02 15,62 6,57 40,53 15,45 40,53 15,55 40,53 15,45 50,78 15,67 15,90 4,91 50,78 16,12
Suhu (oC) Jarak (cm) Rata-rata
Jarak (cm) Error (%) 30,76 16,68 16,79 0,42 30,76 16,68 30,76 16,66 30,76 17,12 40,53 16,20 16,20 3,10 40,53 16,20 40,53 16,19 40,53 16,20 50,78 16,65 16,83 0,71 50,78 16,67 50,78 17,18
suhu tanpa faktor koreksi. Data perbandingan ketiga percobaan diatas dapat dilihat pada Gambar 4.3.
Gambar 4.3 Grafik Perbandingan Hasil Pengukuran
Murata (2010: 2) menyebutkan bahwa hasil pengukuran dengan sensor ultrasonik dipengaruhi oleh empat faktor berikut:
a. Panjang gelombang dan radiasi
Kecepatan gelombang bunyi di udara pada suhu 200C sekitar 344 m/s yang cukup tergolong lambat. Pada kecepatan yang demikian, panjang gelombang yang dipancarkan pendek, yang berarti bahwa resolusi jarak dan arahnya lebih tinggi. Karena resolusi yang lebih tinggi, memungkinkan untuk mendapatkan tingkat akurasi yang cukup besar. Dimensi permukaan alat ultrasonic dapat dengan mudah menghasilkan penyinaran yang akurat.
b. Refleksi
Untuk mendeteksi kehadiran suatu objek, gelombang ultrasonic direfleksikan pada objek. Karena sifat material bahan berbeda beda tingkat pantulan gelombang ultrasoniknya, sehingga faktor refleksi yang dihasilkan akan mengakibatkan besarnya jumlah pulsa yang diterima oleh sensor berbeda pula. c. Suhu
Suhu pada sistem berakibat pada cepat/lambatnya gelombang bunyi merambat di udara. Hal ini secara singkat dapat dijelaskan bahwa ketika suhu meningkat
Suhu (oC) Jarak (cm) Keterangan : Suhu Tetap Suhu Berubah Tanpa koreksi Suhu Berubah dengan koreksi
19
besarnya energi kinetik gas di udara pun meningkat. Dengan demikian mengakibatkan besarnya kecepatan yang merambat pada medium juga meningkat.
d. Atenuasi
Salah satu faktor yang juga mempengaruhi besarnya pengukuran jarak adalah gangguan. Besarnya gangguan yang berjalan teratenuasi sebanding dengan jarak. Hal ini diakibatkan oleh hilangnya difusi pada permukaan sferis akibat fenomena difrasksi dan absorbsi.
20
Melalui hasil yang didapat, penelitian ini dapat disimpulkan bahwa :
a. Hasil pengukuran dengan sensor ultrasonik tidak tepat sama dengan nilai pengukuran sebenaranya yaitu lebih kecil dengan selisih 0,08465 cm dan nilai penyimpangan (error) sebesar 0,503 %.
b. Hasil pembacaan pengukuran jarak dengan perubahan suhu yang dimasukkan faktor koreksi memiliki nilai kesalahan (error) yang lebih kecil dibandingkan dengan hasil data pengukuran jarak dengan perubahan suhu tanpa faktor koreksi
c. Pengaruh faktor koreksi suhu akan mengakibatkan hasil pembacaan pengukuran yang lebih akurat.
d. Pengaruh suhu pada sensor ultrasonik menentukan arah baru dalam penelitian terkait analitik dan skema aplikasi pengukuran jarak.
5.2 Saran
Dari hasil perancangan dan pembuatan sistem pengukuran jarak dengan variasi suhu yang telah dilakukan dapat diberikan saran bahwa sistem ini dapat diaplikasikan ke dalam suatu sistem yang lebih kompleks, sehingga akan didapatkan suatu sistem yang optimal yang mampu mengukur jarak dengan variasi suhu. Pada penelitian selanjutnya, disarankan untuk melakukan looping supaya tingkat akurasi terhadap nilai sebenarnya didapatkan lebih baik. Namun demikian dengan adanya looping atau array yang dijalankan dalam program akan mengakibatkan hasil pembacaan membutuhkan waktu yang lama.
21
DAFTAR PUSTAKA
Arduino Uno, Datasheet Arduino Uno, [Internet]
http://digital.csic.es/bitstream/10261/127788/7/D-c-%20Arduino%20uno.pdf. Diakses pada 14 Mei 2016
Halliday, D , Resnick, R., Walker,J., 1997, Fundamentals Of Physics, John Wiley and Sons, Kanada
Hendro. 2014. Diktat Kuliah Sistem Instrumentasi Analisis. Bandung: Institut Teknologi Bandung.
Murata, 2010, Ultrasonic Sensor: Application Manual,
National Semiconductor, Datasheet LM35, [Internet]
http://www.ece.usu.edu/ece_store/spec/lm35dt-3p.pdf. Diakses pada 16 Mei 2016
Parallax NC, Datasheet Ping))) Parallax, [Internet]
https://www.parallax.com/sites/default/files/downloads/28015-PING-Sensor-Product-Guide-v2.0.pdf. Diakses pada 16 Mei 2016.
Wikipedia, Kecepatan Suara, [Internet].
Lampiran 1
Solusi Analitik
Persamaan umum kecepatan suara yang diberikan persamaan Newton-Laplace:
s K c dimana Ks p, sehingga M T nR c M V p c p c
Untuk di udara J
molK
M R R air . / 93 . 296 028 . 0 314 . 8 *
Untuk gas ideal, n = 1, Sehingga
T R c *
Karena T merupakan suhu mutlak sehingga
273
7 , 415 c Dimana :merupakan suhu dalam satuan celcius
R merupakan konstanta gas molar, besarnya 8.314 J/(mol.K) Ks merupakan elsatisitas modulus bulk untuk gas
ρ merupakan densitas
γ merupakan rasio kapasitas panas udara
M merupakan massa molar gas. Untuk udara kering besarnya yaitu 0.028 kg/mol Besarnya γ dapat dilihat pada Tabel 6.1.
Tabel 6.1 Rasio kapasitas panas Udara kering Suhu (0C) Γ
0 1.403
20 1.400
23
Lampiran 2
25
Lampiran 3
Datasheet Sensor PING))) Parallax
27
Lampiran 4
Script Arduino /* Ping))) Sensor
This sketch reads a PING))) ultrasonic rangefinder and returns the distance to the closest object in range. To do this, it sends a pulse to the sensor to initiate a reading, then listens for a pulse
to return. The length of the returning pulse is proportional to the distance of the object from the sensor.
The circuit:
* +V connection of the PING))) attached to +5V * GND connection of the PING))) attached to ground * SIG connection of the PING))) attached to digital pin 7 http://www.arduino.cc/en/Tutorial/Ping
*/
Tanpa adanya Koreksi Suhu
// this constant won't change. It's the pin number // of the sensor's output:
const int pingPin = 7; void setup() {
// initialize serial communication: Serial.begin(9600);
}
void loop() {
// establish variables for duration of the ping, // and the distance result in inches and centimeters: float duration, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW); delayMicroseconds(2);
digitalWrite(pingPin, HIGH); delayMicroseconds(5); digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH // pulse whose duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH); // convert the time into a distance cm = microtocm(duration);
float suhu = analogRead(A0)*500.0/1024; Serial.print(cm);
Serial.print(" , "); Serial.println(suhu); delay(1000); }
float microtocm(float micro) { return micro / 29 / 2;
}
Dengan Koreksi Suhu
// this constant won't change. It's the pin number // of the sensor's output:
const int pingPin = 7; void setup() {
// initialize serial communication: Serial.begin(9600);
}
void loop() {
// establish variables for duration of the ping, // and the distance result in inches and centimeters: float duration, cm;
29
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(5); digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH // pulse whose duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH); // convert the time into a distance cm = microtocm(duration);
float suhu = analogRead(A0)*500.0/1024; Serial.print(cm);
Serial.print(" , "); Serial.println(suhu); delay(1000); }
float microtocm(float micro) {
float kec = sqrt(((analogRead(A0)*500.0/1024)+273)*1.4*8.314/0.028); return micro / 10000*kec / 2; // variasi suhu