PEMANFAATAN KAMERA CCTV DAN GPS
UNTUK PEMETAAN CEPAT JALAN RAYA
Agus Darpono
Program Studi Teknik Geodesi Institut Teknologi Nasional Malang
ABSTRAKSI
Sistem pemetaan cepat jalan raya merupakan sistem pemetaan yang dilakukan dengan mengintegrasikan dua atau lebih kamera digital dan yang memiliki koordinat peta (georefensi) melalui sensor penentu posisi seperti Global Positioning System (GPS) maupun Inertial Navigation System (INS). Pengintegrasian ini dimaksudkan untuk mempercepat proses akuisisi data, sehingga dapat menghemat waktu dan biaya, dimana keakurasian data yang diperoleh dapat diandalkan untuk pemetaan skala besar serta dapat digunakan untuk memonitor aset jalan raya dan memberikan informasi spasial yang relevan
Dari hasil penelitian yang dilakukan dengan menggunakan 2 (dua) buah kamera CCTV, GPS Trimble DSM 132 dan Pasific Crash yang dipasang diatas mobil didapatkan hasil bahwa tidak terdapat perbedaan yang mencolok lebar jalan yang diukur dengan Total Station Topcon GT 235N. Rata-rata penyimpangan lebar jalan hanya 0.021 meter. Sedangkan dari penentuan titik konjugasi dan parameter EO akan dilakukan proses intersection untuk mendapatkan koordinat objek space point pada jalan raya. Dari proses yang telah dilakukan tersebut terhadap foto stereo menghasilkan rata-rata presisi terhadap koordinat x = 0.001 m; y = 0.003 m; dan z = 0.001 m pada sembilan buah titik konjugasi.
Kata Kunci: Pemetaan, CCTV, GPS, Titik Konjugasi.
PENDAHULUAN
Latar Belakang
Desain sistem ini terdiri dari sepasang kamera yang dipasang sejajar di atap mobil, kemudian jarak antara kedua kamera diukur untuk memperoleh panjang baseline; sedangkan GPS dipasang di antara kedua kamera. Jarak antara kamera dan GPS juga diukur untuk memperoleh koordinat dalam sistem GPS (WGS-84). Komponen-komponen tersebut kemudian dihubungkan melalui komputer/laptop untuk menghimpun informasi yang direkam.
Dengan 2 (dua) buah kamera CCTV dipasang paralel pada platform dengan jarak tertentu secara otomatis akan menghasilkan foto-foto yang
bertampalan. Dari foto-foto yang bertampalan inilah yang kemudian dilakukan pengolahan data menggunakan teknik-teknik fotogrametri hingga menghasilkan koordinat-koordinat obyek jalan.
Tujuan Penelitian
Tujuan dari penelitian ini adalah untuk menganalisis sistem pemetaan cepat (rapid mapping), agar dapat digunakan dengan baik dan memberikan kontribusi yang mendalam pada bidang ilmu fotogrametri dan dalam bidang survei pemetaan jalan raya di Indonesia.
TINJAUAN PUSTAKA
Pengertian Pemetaan Cepat
Sistem pemetaan cepat profil jalan ini pada dasarnya terdiri dari beberapa bagian (Gambar 3), yaitu kalibrasi kamera, akuisisi data, georeferensi, proses data, dan hasil ukuran. Posisis dan orientasi sistem ini diperoleh dari proses georeferensi melalui GPS. Akuisis data dari GPS dan kamera CCTV otomatis telah menghemat waktu dan data yang diperoleh juga akurat. Hasil utama dari sistem ini berupa koordinat jalan dan koridornya serta informasi lainnya untuk memperbaharui data base Sistem Informasi Geografis.
Gambar 1.
Metodologi Akuisisi Data
Hal yang paling penting dalam konsep sistem pemetaan cepat profil jalan ini adalah mempercepat proses akuisisi data. Melalui pengintegrasian kamera CCTV dan GPS, maka proses akuisisi data dapat dipercepat. Namun, untuk mencapai tujuan itu, maka teknik fotogrametri juga dipakai. Dengan teknik ini pula, maka berbagai data spasial, seperti misalnya koordinat jalan dan koridornya, dapat diekstrak dari foto stereo hasil rekaman kamera CCTV.
Untuk memperoleh parameter relative orientation dari sepasang kamera CCTV ini, maka dilakukan teknik constrain bundle adjustment terhadap panjang baseline. Namun, untuk memperoleh parameter ini, maka dibutuhkan nilai pendekatan awal (exterior orientation atau EO) yang dihitung menggunakan metode yang dikemukakan oleh Rampal (1979) atau Zeng dan Wang (1992).
Dari nilai pendekatan awal tersebut, maka persamaan garis lurus (persamaan kolinier) pada obyek dan pada foto dapat dihitung sebagai berikut (Mikhail et al., 2001, Lumann et al., 2006).
(
) (
) (
)
(
) (
) (
)
(
)
(
) (
)
(
) (
) (
)
0 Z Z Y Y X X Z Z Y Y X X c y y 0 Z Z Y Y X X Z Z Y Y X X c x x C 33 C 32 C 31 C 23 C 22 C 21 y o C 33 C 32 C 31 C 13 C 12 C 11 x o = − + − + − − + − + − + ∆ + − = − + − + − − + − + − + ∆ + − r r r r r r r r r r r rDimana ∆x dan ∆y adalah model kesalahan sistematik dalam arah x
dan y; r11 merupakan elemen dari matrik rotasi; xo, yo adalah koordinat
principal point; c adalah panjang fokus kamera, X,Y,Z adalah koordinat 3 demensi titik-titik obyek; Xc,Yc,Zc adalah koordinat 3 demensi kamera saat pemotretan; dan x,y merupakan koordinat foto, yaitu satu-satunya informasi yang diketahui (known observation) dari pengukuran langsung. Parameter yang lain tidak diketahui nilainya (unknown). Untuk setiap pengukuran koordinat foto akan menghasilkan sepasang persamaan garis lurus (persamaan 5).
Apabila parameter EO “relatif” antar kedua kamera tersebut sudah dapat diketahui, maka ketika salah satu posisi kamera CCTV diberi koordinat GPS, kamera yang lainnya dapat dengan mudah dihitung posisinya dalam sistem koordinat GPS. Dengan demikian, maka akan diperoleh dua buah foto stereo terkalibrasi dan langkah selanjutnya adalah pencocokan citra untuk mengekstrak koordinat jalan. Teknik yang digunakan untuk pencocokan citra dan untuk men-digitasi titik-titik obyek pada foto stereo ini adalah dengan teknik image matching (Schenk, 1999).
Kalibrasi Kamera
Kamera CCTV bukan merupakan kamera metrik. Artinya, susunan lensa dan CCD sensor tidak stabil sehingga perlu dikalibrasi untuk meminimalakan efek sistematik pada kamera CCTV (Gambar 4) dan agar koordinat 3D dapat diekstrak maka diperlukan parameter-parameter kalibrasi. Tujuan dilakukan kalibrasi yaitu untuk memperoleh parameter oriantasi dalam (Interior Orientation) yang meliputi panjang fokus, koordinat pricipal point, serta parameter distorsi radial dan tangensial.
Gambar 2.
Model Distorsi Lensa Kamera CCTV Kiri: kamera sebelum dikalibrasi Kanan: kamera setelah dikalibrasi
Parameter kalibrasi kamera memegang peranan kunci untuk mendapatkan keakurasian tinggi titik-titik koordinat dari obyek-obyek yang terekam/ diukur melalui kamera CCTV. Indikasi ketelitian adalah jarak dan
bentuk (shape) yang benar jika dibandingkan dengan data lapangan.
Metode yang digunakan untuk mengkalibrasi kamera mengikuti metode yang diuraikan oleh Wolf & Dewitt (2000), yaitu: (1) Orientasi Dalam (Interior Orientation), (2) Distorsi Radial, (3) Distorsi Tangensial, dan (4) Distorsi Affinity.
Pencocokan Citra (Image Mathcing)
Setelah posisi kedua kamera sudah dapat dikonversi ke dalam koordinat sistem GPS, maka titik konjugasi dapat dihitung nilai koordinat 3D-nya dengan teknik intersection (prinsip triangulasi) (Mikhail et al., 2001; Wolf dan Dewitt, 2000). Namun, sebelum proses intersection dilakukan, maka terlebih dahulu dipilih titik-titik konjugasi. Untuk menghasilkan ketelitian optimum maka teknik image matching (Schenk, 1999) digunakan untuk men-digitasi titik-titik koordinat pada kedua foto stereo. Ada beberapa teknik image matching untuk pendigitasian titik-titik koordinat, yaitu dengan teknik Feature-based Matching dan Area–based Matching. Namun, dalam gagasan ini metode yang akan digunakan adalah teknik Area-based Matching karena dengan teknik ini ketelitian titik konjugasi dapat mencapai ketelitian sub-piksel. Dua metode yang digunakan dalam teknik Area-based Matching yaitu
Normalized Cross Correlation (NCC) dan Least Square Matching (LSM) (Schenk, 1999).
Normalized Cross Correlation (NCC)
Normalized Cross Correlation (NCC) dilakukan pada tahap awal untuk memperoleh nilai korelasi antar dua kelompok data nilai keabuan (gray value). Keunggulan teknik NCC adalah kecepatan komputasinya, tetapi hanya menghasilkan ketelitian 1 piksel (Mikhail et al., 2001).
Untuk menghitung nilai korelasi dapat dilakukan dengan menggunakan persamaan berikut (Wolf dan Dewitt, 2000):
(
)(
)
[
]
(
)
(
)
−
−
−
−
=
∑∑
∑∑
∑∑
= = = = = = m i n j ij m i n j ij m i n j ij ijB
B
A
A
B
B
A
A
c
1 1 2 1 1 2 1 1Keterangan:
c : merupakan nilai korelasi dari kedua citra
ij ij B
A , : merupakan nilai keabuan (gray value) dari foto kiri dan foto kanan (template dan matching window)
B
A, : merupakan nilai rata-rata keabuan (gray value) pada foto kiri dan foto kanan (template dan matching window)
Apabila nilai korelasi telah sesuai maka obyek yang dianggap sama akan terorientasi dengan ditunjukkan oleh garis epipolar (Gambar 3).
Gambar 3.
Sepasang foto stereo dengan epipolar geometri
Keterangan gambar:
Ci, Cj : perspective center pada kamera (i) dan kamera (j)
P : titik obyek
Li, Lj : garis epipolar yang menghubungkan titik sepanjang Pi dan Pj
Least Square Matching (LSM)
Teknik Least Square Matching (LSM) digunakan untuk memperoleh
keakurasian titik konjugasi hingga mencapai ketelitian sub-piksel yakni 0,01 piksel (Luhman et al., 2006; Scheller et al., 2007). Least Square Matching membutuhkan nilai pendekatan posisi yang cukup dekat terhadap nilai sebenarnya agar nilai iterasi lebih konvergen. Pendekatan dapat dilakukan dengan menggunakan transformasi affine yang terdiri dari 6 parameter transformasi (Gruen, 2001). + + + + = − 0 11 0 12 0 21 ) , ( ) , ( ) , (x y e x y g x y g da g x da g y da f x x x
g
ydb
11+
g
yx
0db
12+
g
yy
0db
21+
r
s+
g
0(
x
,
y
)
r
t Keterangan: ) , (x yf : merupakan koordinat template
( )
x
y
g
0,
: merupakan koordinat pendekatan dari matching window) , (x y
e : merupakan noise (efek acak) pada citra
da g da
gx , y : merupakan gradien dari arah x dan y.
rs(shift/pergerseran) dan rt(scale/skala). Kedua parameter ini merupakan
parameter tambahan yang kemudian disebut parameter radiometrik.
PELAKSANAAN PENELITIAN
Sistem pemetaan cepat profil jalan ini pada dasarnya terdiri dari beberapa bagian, yaitu kalibrasi kamera, akuisisi data, georeferensi, proses data, dan hasil ukuran. Posisi dan orientasi sistem ini diperoleh dari proses georeferensi melalui GPS. Akuisisi data dari GPS dan kamera CCTV otomatis telah menghemat waktu dan data yang diperoleh juga akurat. Hasil utama dari sistem ini berupa koordinat jalan dan koridornya serta informasi lainnya.
Berdasarkan uraian di atas, maka pelaksanaan penelitian ini dapat dituliskan sebagai berikut:
1. Melakukan kalibrasi kamera CCTV.
Kamera CCTV bukan merupakan kamera metrik. Artinya, susunan lensa dan CCD sensor tidak stabil sehingga perlu dikalibrasi untuk meminimalakan efek sistematik pada kamera CCTV (Gambar 2) dan agar koordinat 3D dapat diekstrak, maka diperlukan parameter-parameter kalibrasi. Tujuan dilakukan kalibrasi adalah untuk memperoleh parameter oriantasi dalam (interior orientation) yang meliputi panjang fokus, koordinat principal point, serta parameter distorsi radial dan tangensial.
2. Metodologi Akuisisi Data
Hal yang paling penting dalam konsep sistem pemetaan cepat profil jalan ini adalah mempercepat proses akuisisi data. Melalui pengintegrasian kamera CCTV dan GPS, maka proses akuisisi data dapat dipercepat. Namun, untuk mencapai tujuan itu, maka teknik fotogrameteri dipakai. Dengan teknik ini pula maka berbagai data spasial seperti misalnya koordinat jalan dan koridornya dapat diekkstrak dari foto stereo hasil rekaman kamera CCTV.
3. Pencocokan Citra (Image Maching)
Setelah posisi kedua kamera sudah dapat dikonversi kedalam koordinat sistem GPS, maka titik konjugasi dapat dihitung nilai koordinat 3D-nya dengan teknik intersection (prinsip triangulasi) (Mikhail et al., 2001; Wolf dan Dewitt, 2000). Namun, sebelum
proses intersection dilakukan, maka terlebih dahulu dipilih titik-titik
konjugasi. Untuk menghasilkan ketelitian optimum, maka teknik Image Matching (Schenk, 1999) digunakan untuk mendigitasi titik-titik koordinat pada kedua foto stereo.
HASIL DAN PEMBAHASAN
Data Kalibrasi Kamera
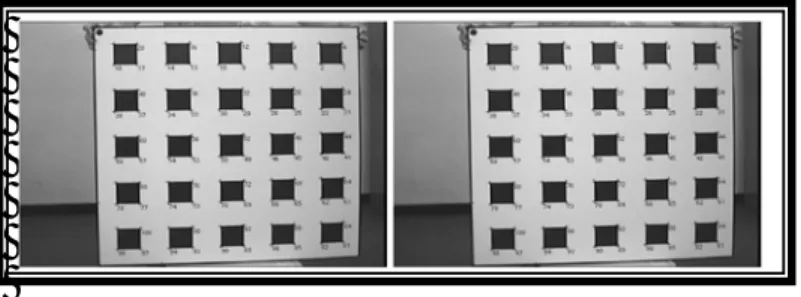
Gambar di di bawah ini adalah pengukuran 100 titik yang terdapat pada papan kalibrasi. Selanjutnya, akan dilakukan proses pengkalibrasian dengan program terhadap data foto stereo yang diambil dengan kamera CCTV. Pada program tersebut, data manual dan digital dari papan kalibrasi akan secara otomatis tergabung serta menghasilkan koordinat papan lengkap dengan labelnya.
Gambar 4.
Kalibrasi Kamera dengan Foto Stero dari Papan Kalibrasi
Ketelitian yang dihasilkan dari proses kalibrasi kamera dengan menggunakan dua buah kamera CCTV pada foto papan kalibrasi yang stereo dapat dilihat dari nilai baseline yang dihasilkan sebesar 49.59649 cm. Dari nilai tersebut terdapat selisih sebesar 0.4035 cm terhadap panjang baseline (jarak antar dua kamera) 50 cm.
Data Pengukuran Jalan Raya menggunakan Kamera Digital (CCTV)
Dari pengukuran dengan sistem pemetaan cepat ini menghasilkan 8 (delapan) pasang data foto yang stereo dengan menggunakan dua buah kamera digital (kiri dan kanan). Selanjutnya, diproses menggunakan metode fotogrametri yang diimplementasi ke dalam program.
Gambar 5.
Proses data foto stereo pada jalan
Proses tersebut menghasilkan data-data koordinat objek space point (dalam sistem koordinat foto) seperti yang ditampilkan pada tabel berikut:
Tabel 1.
Data Koordinat Objek Space
No. Point ID Koordinat Foto (m) x y z 1 P1 0.0000 0.0000 0.0000 2 P2 1.4853 -0.0281 -0.0019 3 P3 2.6666 0.0000 0.0000 4 P4 0.1158 5.0763 0.0000 5 P5 1.5056 5.0905 0.0433 6 P6 2.9868 4.9895 0.0533 7 P7 0.2825 10.2024 0.0922 8 P8 1.7850 10.1876 0.1192 9 P9 3.2886 10.1315 0.1394 10 P10 0.5444 15.3542 0.1642 11 P11 2.0123 15.2931 0.1733 12 P12 3.5473 15.3115 0.1802 P1 P2 P3 P6 P5 P4 P7 P8 P9 P1 P1 P1 P1 P2 P3 P6 P5 P4 P7 P8 P9 P1 P1 P1
Data Pengukuran menggunakan Total Station (TS)
Pengukuran ini dilakukan sebagai kontrol jarak pada setiap titik yang disurvei dan dilakukan perhitungan dengan proses topografi.
Tabel 2.
Data Koordinat Hasil Total Station dengan Sistem Lokal
No. Point ID Koordinat Foto (m) x y z 1 P1 1002.551 1008.980 100.054 2 P2 1003.854 1008.269 99.990 3 P3 1004.935 1007.804 99.951 4 P4 1007.349 1012.040 100.005 5 P5 1006.100 1012.789 100.055 6 P6 1004.860 1013.382 100.061 7 P7 1007.218 1017.818 100.171 8 P8 1008.554 1017.138 100.137 9 P9 1009.860 1016.433 100.097 10 P10 1009.691 1022.257 100.251 11 P11 1010.978 1021.505 100.203 12 P12 1012.337 1020.865 100.150 13 P13 1012.083 1026.617 100.263 14 P14 1013.366 1025.865 100.260 15 P15 1014.716 1025.125 100.188 16 P16 1014.469 1030.977 100.350 17 P17 1015.804 1030.250 100.337 18 P18 1017.126 1029.479 100.293 19 P19 1016.896 1035.421 100.401 20 P20 1018.203 1034.609 100.396 21 P21 1019.509 1034.006 100.350 22 P22 1019.251 1039.709 100.446 23 P23 1020.590 1039.017 100.415 24 P24 1021.848 1038.298 100.410 25 P25 1021.640 1044.008 100.489 26 P26 1022.997 1043.370 100.499 27 P27 1024.355 1042.664 100.449
Analisa Hasil Pengukuran
Sistem pemetaan cepat ini merupakan metode pengukuran dengan menggunakan dua buah kamera digital (CCTV) yang diintegrasikan dengan sistem navigasi berupa GPS. Dari pengukuran tersebut akan menghasilkan data video yang selanjutnya akan dikonversi ke dalam bentuk image/foto (*.JPEG atau *.TIF), dan untuk selanjutnya dilakukan proses data dengan teknik fotogrametri. Dalam hal ini, contoh data yang ditampilkan menggunakan 8 pasang foto stereo dengan objek penelitian di Kampus I ITN Malang.
Gambar 6.
Ilustrasi Foto-foto yang Direkam dari Kamera Kiri dan Kanan
Selain menggunakan pengukuran dan perhitungan dengan teknik Fotogrametri, akan dilakukan pula pengukuran dan perhitungan dengan cara terestris menggunakan alat Total Station agar dapat dilakukan perbandingan terhadap data yang dihasilkan dan dari segi efisiensi waktu pada pengambilan data sampai dengan prosesingnya.
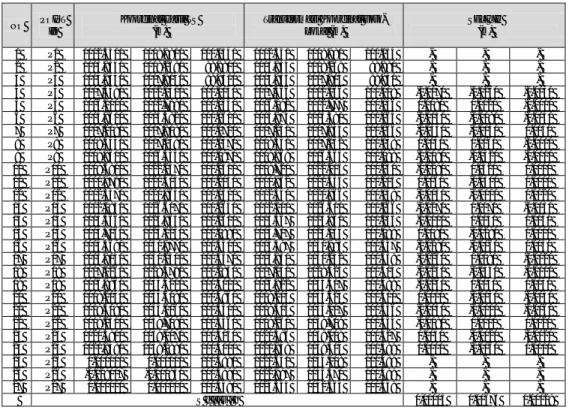
Tabel 3.
Koordinat Hasil Pemotretan dan Pengukuran dengan Total Station
NO POINT ID Koordinat Hasil TS (m) Transformasi Koordinat Foto-Lokal (m) SELISIH (m)
1 P1 1002.5510 1008.9800 100.0540 1002.551 1008.980 100.054 - - - 2 P2 1003.8540 1008.2690 99.9900 1003.854 1008.269 99.990 - - - 3 P3 1004.9350 1007.8040 99.9510 1004.935 1007.804 99.951 - - - 4 P4 1007.3490 1012.0400 100.0050 1007.366 1012.066 100.008 -0.0170 -0.0260 -0.0030 5 P5 1006.1000 1012.7890 100.0550 1006.092 1012.777 100.056 0.0080 0.0120 -0.0010 6 P6 1004.8600 1013.3820 100.0610 1004.874 1013.390 100.065 -0.0140 -0.0080 -0.0040 7 P7 1007.2180 1017.8180 100.1710 1007.251 1017.833 100.166 -0.0330 -0.0150 0.0050 8 P8 1008.5540 1017.1380 100.1370 1008.551 1017.132 100.138 0.0030 0.0060 -0.0010 9 P9 1009.8600 1016.4330 100.0970 1009.869 1016.465 100.098 -0.0090 -0.0320 -0.0010 10 P10 1009.6910 1022.2570 100.2510 1009.720 1022.215 100.250 -0.0290 0.0420 0.0010 11 P11 1010.9780 1021.5050 100.2030 1010.962 1021.535 100.203 0.0160 -0.0300 0.0000 12 P12 1012.3370 1020.8650 100.1500 1012.340 1020.866 100.148 -0.0030 -0.0010 0.0020 13 P13 1012.0830 1026.6170 100.2630 1012.110 1026.610 100.266 -0.0270 0.0070 -0.0030 14 P14 1013.3660 1025.8650 100.2600 1013.367 1025.861 100.255 -0.0010 0.0040 0.0050 15 P15 1014.7160 1025.1250 100.1880 1014.707 1025.154 100.188 0.0090 -0.0290 0.0000 16 P16 1014.4690 1030.9770 100.3500 1014.497 1030.983 100.347 -0.0280 -0.0060 0.0030 17 P17 1015.8040 1030.2500 100.3370 1015.830 1030.242 100.339 -0.0260 0.0080 -0.0020 18 P18 1017.1260 1029.4790 100.2930 1017.151 1029.523 100.304 -0.0250 -0.0440 -0.0110 19 P19 1016.8960 1035.4210 100.4010 1016.922 1035.417 100.398 -0.0260 0.0040 0.0030 20 P20 1018.2030 1034.6090 100.3960 1018.203 1034.624 100.400 0.0000 -0.0150 -0.0040 21 P21 1019.5090 1034.0060 100.3500 1019.513 1034.017 100.356 -0.0040 -0.0110 -0.0060 22 P22 1019.2510 1039.7090 100.4460 1019.260 1039.709 100.434 -0.0090 0.0000 0.0120 23 P23 1020.5900 1039.0170 100.4150 1020.586 1039.019 100.427 0.0040 -0.0020 -0.0120 24 P24 1021.8480 1038.2980 100.4100 1021.848 1038.304 100.399 0.0000 -0.0060 0.0110 25 P25 0.000000 0.000000 100.4890 1021.640 1044.008 100.489 - - - 26 P26 -0.028107 -0.001941 100.4990 1022.997 1043.370 100.499 - - - 27 P27 0.000000 0.000000 100.4490 1024.355 1042.664 100.449 - - - S e l i s i h 0,01005 0.00676 0.00029
Analisa Dari Perbandingan Koordinat Yang Dihasilkan
Dari tabel 3 dapat dilihat bahwa hasil koordinat objek yang dihasilkan dengan pengukuran Mobile Mapping System (MMS) dan dengan pengolahan dengan teknik fotogrametri, tidak jauh berbeda dengan hasil koordinat yang dihasilkan Total Station. Apabila dilihat dari hal tersebut, sistem ini sudah cukup baik dengan selisih nilai terbesar terdapat pada titik 10 (P10), yaitu: untuk selisih nilai X = -0.0290; nilai Y = 0.0420; nilai Z = 0.0010 (dalam satuan meter), dan dengan nilai selisih rata-rata berkisar di bawah 1 mm untuk panjang jalan/total jarak keseluruhan 40 m.
Analisa Hasil Jarak Antar Titik
Dari hasil koordinat tersebut kemudian di-plot ke dalam AutoCad dan dilakukan pengukuran jarak terhadap lebar dan panjang jalan. Pengukuran tersebut menghasilkan data sebagai berikut:
Gambar 7.
Ilustrasi Ukuran Jarak pada Jalan yang Disurvei
Tabel 4.
Data Pengukuran Lebar Jalan
INS. LEBAR JALAN ( m ) LEBAR
RATA2 TIPE 1 2 3 4 5 6 7 8 9 PHOTO 2.658 2.822 2.954 2.947 2.977 3.029 2.945 2.945 3.029 2.923 TS 2.658 2.828 2.983 2.990 3.026 3.050 2.972 2.956 3.029 2.944 SELISIH 0.021 P1 P2 P3 P6 P5 P4 P7 P8 P9 P10 P11 P12 lebar 2 lebar 3 lebar 4 panjang kiri 1 panjang kiri 2 panjang kiri 3 panjang kanan 1 panjang kanan 2 panjang kanan 3 lebar 1
Tabel 5.
Data Ukuran pada Sisi Kiri dan Kanan Jalan
P`NJANG SISI KIRI PANJANG SISI KANAN SLAG KIRI INSTRUMEN SELISIH SLAG SLAG KANAN INSTRUMEN SELISIH SLAG PHOTO TS PHOTO TS 1 4.9708 4.9844 0.0136 1 4.8756 4.9066 0.0310 2 5.0238 5.0389 0.0151 2 5.0600 5.0612 0.0012 3 5.0914 5.0297 0.0617 3 5.0772 5.0472 0.0300 4 4.9731 5.0028 0.0297 4 4.8793 4.8979 0.0186 5 4.9702 4.9821 0.0119 5 4.9765 5.0061 0.0296 6 5.0635 5.0538 0.0097 6 5.1159 5.0769 0.0390 7 4.8921 4.8875 0.0046 7 4.8880 4.8817 0.0063 8 4.9182 4.9138 0.0044 8 5.0346 5.0294 0.0052 JUMLAH 39.9031 39.893 0.018838 JUMLAH 39.9071 39.9070 0.0201 SELISIH 0.010 SELISIH 0.000
Data ukuran tersebut kemudian di-rata-rata, sehingga mendapatkan selisih nilai pengukuran yang menggunakan foto dengan pengukuran
menggunakan Total Station. Perbedaan nilai pengukuran rata-rata untuk
lebar jalan adalah 0.021 m, sehingga dapat dikatakan cukup kecil dan pada pengukuran terhadap sisi kanan jalan hampir tidak terdapat selisih nilai pengukuran.
KESIMPULAN DAN SARAN
Kesimpulan
Pengintegrasian perangkat video kamera dengan GPS memiliki potensi untuk dapat melakukan inventarisasi dan pemetaan profil jalan secara ekonomis, cepat, dan akurat. Dengan sistem ini, diseminasi data geospasial akan dapat dilakukan dengan mudah dan efisien. Hasil penelitian dapat disimpulkan sebagai berikut:
1. Dari proses perhitungan metode fotogrametri dan pengukuran
dengan total station untuk menentukan lebar jalan yang diamati
tidak terdapat perbedaan yang mencolok, yaitu rata-rata penyimpangan lebar jalan hanya 0.021 meter.
2. Digitasi terhadap titik-titik konjugasi pada dua foto stereo dengan
teknik Image Matching, menggunakan metode Normalized Cross
Correlation (NCC) dan Least Square Matching (LSM) menghasilkan ketelitian 1 piksel dan dengan komputasi yang cepat; sedangkan metode LSM menghasilkan ketelitian hingga 0.01 piksel dan relatif lambat karena menerapkan perhitungan kuadrat terkecil.
3. Hasil perbandingan pengukuran dan pengolahan antara metode fotogrametri dengan metode terestrial, baik dari posisi (X, Y, Z) titik
objek space ataupun jarak (panjang dan lebar) jalan yang diukur
tidak menunjukan perbedaan nilai yang begitu jauh. Dengan kata lain, selisih dari kedua metode pengukuran tersebut sangatlah kecil.
Saran
Dalam penelitian ini masih terdapat banyak kekurangan karena sistem ini masih dalam tahap percobaan dan masih pada proses pengembangan. Dengan demikian, saran untuk penelitian selanjutnya adalah sebagai berikut:
1. Penggunaan kamera CCTV dengan resolusi yang tinggi agar dapat menghasilkan foto dengan kualitas yang lebih baik, sehingga dapat menunjang hasil keakurasian data yang didapat.
2. Desain bar yang compactible pada semua jenis mobil dan
dirancang dengan baik supaya tahan terhadap getaran mesin dan goncangan, sehingga data foto yang dihasilkan menjadi lebih baik.
DAFTAR PUSTAKA
Clarke, T.A. and Fryer, J.G. 1998. The Development of Camera Calibration Methods
and Models. Photogrammetric Record 16(91): 51-66.
Ellum, C. and El-Sheimy, N. 2000. The Development of a Backup Mobile Mapping
System. International Archives of Photogrammetry and Remote Sensing, Vol. 32, Part 2, 184-191.
Fryer, J.G. 1989. Camera Calibration in Non-Topographic Photogrammetry. In: H.M.
Karara (Editor). Non-Topographic Photogrammetry. American Society for
Photogrammetry and Remote Sensing. Virginia: Falls Church.
________. 2001. Camera Calibration. In: K.B. Atkinson (Editor). Close Range Photogrammetry and Machine Vision. Scotland, UK: Whittles Publishing.
Geem, C.V. and Gautama, S. 2006. Mobile Mapping with a Stereo-Camera for Road
Assessment in the frame of Road Network Management.
Gruen, A.W. 2001. Least Square Matching: A Fundamental Measurment Algorithm.
In: K.B. Atkinson (Editor). Close Range Photogrammetry and Machine Vision. Scotland, UK: Whittles Publishing.
He, G., Orvets, G. 2000. Capturing Road Network Data Using Mobile Mapping
Technology. International Archives of Photogrammetry and Remote Sensing. Vol. 33, Part B2. Amsterdam.
Laflamme, C., Kingston, T., and Mccuaig R. 2006. Automated Mobile Mapping for
Asset Managers. Germany: FIG Conference.
Li, R. 1997. Mobile Mapping: An Emerging Technology for Spatial Data Acquisition. Photogrammetric Engineering and Remote Sensing, 63 (9): 1085-1092, Bethesda, ASPRS.
Luhman, T., Robson, S., Kyle, S., and Harley, I. 2006. Close Range
Photogrammetry Principles, Techniques and Aplication. Scotland, UK: Whittles Publishing.
Mikhail, E.M., Bethel, J.S. and McGlone, J.C. 2001. Introduction to Modern Photogrammetry. New York: John Wiley & Sons Inc.
Myong Jong, Noh and Woosug, Cho. 2008. A Sdy On Generating Stereo Mozaic
Image Using Video Frame. Annual Conference. ASPNS. Portland, Oregon.
Rampal, K.K. 1979. A Closed Solution for Space Resection. Photogrammetric
Robert Enriken, Robert, Rizos Chris. 2007. Aplication Of Mobile Mapping Technology Within a Road ang Traffic Authority. AGNSS Symposyum. Sidney, Australia.
Schenk, T. 1999. Digital Photogrammetry. Ohio, USA: TerraScience.
Scheller, S., Westfeld, P., and Ebersbach D. 2007. Calibration of a Mobil Mapping Camera System With Photogrammetric Methods. 5th International
Symposium on Mobile Mapping Technology.
Wolf, P.R., and Dewitt, B.A. 2000. Elements of Photogrammetry with Applications in
GIS. 3rd Edition. New York: McGraw-Hill Companies Inc.
Wang, X and.Zeng, Z. 1992. A General Solution of a Closed-Form Space
Resection. Photogrammetric Engineering & Remote Sensing, 58(3): 327-338. Lambdatech: http://www.lambdatech.com (Akses Website 28 Pebruari, 2013). Roadware : http://www.roadware.com (Akses Website 28 Pebruari, 2013). VISAT: http://www.visat.com. (Akses Website 28 Pebruari, 2013 )