ATMEGA8 DAN SMS GATEWAY
SKRIPSI
OLEH :
MUCHAMMAD MUCHLIS
NPM : 0634010184
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
ATMEGA8 DAN SMS GATEWAY
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Program Studi Teknik Informatika
OLEH :
MUCHAMMAD MUCHLIS
NPM : 0634010184
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
SENSOR MAGNET BERBASIS MIKROKONTROLER
ATMEGA8 DAN SMS GATEWAY
Disusun oleh :
MUCHAMMAD MUCHLIS NPM : 0634010184
Telah disetujui mengikuti Ujian Negara Lisan Gelombang V Tahun Akademik 2010 / 2011
Pembimbing I
Basuki Rahmat, S.Si, MT NPT. 3690 7060 213
Pembimbing II
Fetty Tri Anggraeny, S.Kom NPT. 3820 2060 208
Mengetahui,
Ketua Jurusan Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
SENSOR MAGNET BERBASIS MIKROKONTROLER
ATMEGA8 DAN SMS GATEWAY
Disusun Oleh :
MUCHAMMAD MUCHLIS
NPM : 0634010184
Telah dipertahankan dan diterima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur Pada Tanggal 11 juni 2010
Pembimbing : 1.
Basuki Rahmat, S.Si, MT NPT. 3690 7060 213
Tim Penguji : 1.
Ir. Kemal Wijaya, MTP NIP. 195909215987031001
2.
Fetty Tri Anggraeny, S.Kom NPT. 3820 2060 208
Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
Dengan mengucap puji syukur atas kehadirat Tuhan Yang Maha Esa yang telah memberikan rahmat-Nya sehingga penulis bisa menyelesaikan Tugas Akhir yang berjudul : ”ROBOT LENGAN PEMILAH BENDA BERDASARKAN
UKURAN BENDA MENGGUNAKAN MIKROKONTROLLER MCS-51 DAN SENSOR ULTRASONIK”.
Dalam penulisan laporan Tugas Akhir ini penulis menyadari telah banyak mendapatkan bantuan dari berbagai pihak baik dari segi moril maupun materiil. Oleh karena itu pada kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Prof. Dr. Ir. Teguh Soedarto, MP Selaku Rektor UPN “Veteran” Jawa Timur. 2. Ir. Sutiyono, MT Selaku Dekan Fakultas Teknologi Industri Universitas
Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
3. Bapak Basuki Rahmad S.si, MT selaku Ketua Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur yang juga sekaligus sebagai dosen pembimbing I yang banyak membantu penulis dalam menyelesaikan Tugas Akhir ini.
4. Ibu Fetty Tri Anggraeny, S.kom selaku dosen pembimbing II penulis di jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya yang telah memberikan arahan dan bimbingannya sehingga penulis dapat menyelesaikan laporan Tugas Akhir ini.
5. Ibu tercinta yang telah memberikan dukungan, do’a, cinta, kasih sayang dan semua pengorbanan yang di berikan kepada penulis untuk dapat menyelesaikan Tugas Akhir.
6. Bapak penulis yang telah memberikan dukungan dan bantuan kepada penulis mencari solusi dalam menyelesaikan Tugas Akhir meskipun dalam keadaan lelah sehabis bekerja tetapi beliau mau merelakan waktu istirahatnya untuk menemani penulis.
tidak mungkin penulis sebutkan namanya satu per satu terima kasih telah membantu penulis untuk menyelesaikan tugas praktek kerja lapang ini.
Penulis menyadari bahwa dalam penulisan laporan Tugas Akhir ini masih banyak kekurangannya. Oleh sebab itu penulis berharapkan kritik dan saran yang sifatnya membangun dari pembaca demi kesempurnaan laporan Tugas Akhir ini. semoga laporan Tugas Akhir ini dapat bermanfaat bagi penulis maupun para pembaca.
Surabaya, juni 2010
Penulis
LEMBAR PENGESAHAN TUGAS AKHIR
LEMBAR PENGESAHAN DAN PERSETUJUAN
ABSTRAK
2.1.2 Pemrograman Bahasa Assembly MCS ………. 18
2.3 Motor Servo ……….……… 23
2.4 Sensor Ultrasonik Modul Dsonar ………. 24
2.5 Tenaga/Power Sebuah Robot ……….. 26
2.6 Programmer DU-ISP V2.0 ……….. 27
2.7 Pemrograman Assembly dengan Menggunakan DStudio 3.7b ………. 28
3.4 Perancangan Diagram Mekanik Robot Lengan ….. 35
3.4.1 Perancangan Dimiensi Robot Lengan ….. 35
3.4.2 Perancangan Small Sistem AT89s51 …. 42
3.5 Daftar Komponen dan Alat yang dipergunakan ….. 44
3.6 Diagram Alur Sistem ……….. 47
3.7 Diagram Alur Sensor Ultrasonik ……….. 48
3.8 Diagram Alur Servo Kontrol DSR-08 ………….. 49
4.1.1 Pembuatan PCB (Printed Circuit Board) Small
Sistem AT89s51 ……….... 52
4.1.2 Instalasi Komponen Small Sistem AT89s51 …… 55
4.2 Pengujian Perangkat Keras ……… 55
4.2.1 Pengujian Small Sisitem AT89s51 ……… 56
4.2.2 Pengujian Servo Kontrol modul DSR-08 …… 57
4.2.3 Pengujian Motor Servo ……… 58
4.2.4 Pengujian sensor Ultrasonik modul Dsonar …… 58
4.2.5 Pengujian Switch ……… 59
4.3 Perakitan Robot ……… 60
4.4 Penjelasan Perangkat Lunak ……… 70
4.4.1 Menghubungkan Port Mikrokontroller dengan Komputer ……… 70
4.4.2 Mengisi Data Program Mikrokontroller AT89s51 . 71 BAB V : UJI COBA ……… 75
5.1 Cara Pengoperasian Robot ……… 75
5.2 Uji Coba Robot Lengan ……… 79
6.2 Saran ……… 86
DAFTAR PUSTAKA
LAMPIRAN A : Gambar Rangkaian
LAMPIRAN B : Data Sheet Motor Servo
Gambar 2.2 Blok Diagram AT89s51 ……… 13
Gambar 2.3 Skema Rangkaian Small Sistem AT89s51 ……… 21
Gambar 2.4 Skema Rangkaian Servo Controller DSR-08 ……… 22
Gambar 2.5 Servo Kontrol DSR-08 ……… 23
Gambar 2.6 Motor Servo ……… 24
Gambar 2.7 Pantulan Gelombang Ultrasonik ……… 25
Gambar 2.8 Sensor Ultrasonik DSonar ……… 26
Gambar 3.8 Jarak sensor ultrasonic dengan benda ……… 40
Gambar 3.9 Tata Letak Komponen Rangkaian AT89s51 ……… 43
Gambar 3.10 Jalur Rangkaian AT9s51 ……… 44
Gambar 3.11 Diagram Alur Sistem ……… 47
Gambar 3.12 Diagram Alur Sensor Ultrasonik DSonar ……… 48
Gambar 3.13 Diagram Alur Servo Kontrol DSR-08 ……… 49
Gambar 3.14 Diagram Alur Switch ……… 50
Gambar 3.15 Diagram Downloader ……… 51
Gambar 4.1 Layout belakang ……… 53
Gambar 4.6 Mur Penyangga ……… 61
Gambar 4.7 Installasi Mur Penyangga ……… 61
Gambar 4.8 Installasi Motor Servo 1 ……… 62
Gambar 4.9 Memasang atap Box ……… 62
Gambar 4.10 Installasi Mur Penyangga dua ……… 63
Gambar 4.11 Memasang lantai dasar pada motor servo 1 ……… 63
Gambar 4.12 Installasi lantai dan motor servo 2 dan 3 ……… 64
Gambar 4.13 Instalasi penyangga utama kanan ke motor servo 2 …… 64
Gambar 4.14 Instalasi penyangga utama kiri ke motor servo 3 …… 65
Gambar 4.15 Instalasi penopang penyangga utama ……… 65
Gambar 4.16 Instalasi penyangga dua kiri dan motor servo 4 …….…… 66
Gambar 4.17 Instalasi penyangga kedua kanan ……… 66
Gambar 4.18 Instalasi motor servo 5 dan gripper ………... 67
Gambar 4.19 Kerangka Gripper ……… 67
Gambar 4.20 Gripper yang sudah dirakit ……… 68
Gambar 4.21 Mekanik Robot Lengan yang sudah dirakit ……… 68
Gambar 4.22 Instalasi Rangkaian elektronika ……… 69
Gambar 4.23 Robot Lengan yang sudah dirakit keseluruhan …… 69
Gambar 4.24 Port Downloader DU-ISP v2 ke Mikrokontroller …… 71
Gambar 4.25 Setting Port Mikrokontroller ……… 72
Gambar 4.26 Read Signature ……… 73
Tabel 2.1 Port Pin 1 ……… 15 Tabel 2.2 Port Pin 3 ……… 16 Tabel 3.1 Posisi sudut putaran motor servo untuk mengambil benda 41 Tabel 3.2 Posisi sudut putaran motor servo untuk mengangkat benda 41 Tabel 3.3 Posisi sudut putaran motor servo untuk menaruh benda
pada tempat A ………. 42 Tabel 3.4 Posisi sudut putaran motor servo untuk menaruh benda
ABSTRAK
Robot sebagai bentuk inovasi pada bidang teknologi industry yang mengalami perkembangan pesat untuk mendukung kesejahteraan hidup manusia. Adanya pemilahan container pada industry peti kemas dan juga kontes robot cerdas Indonesia mendorong pembuatan robot yang mampu bergerak memilah benda berdasarkan ukuran benda sesuai area kerja pergerakan robot. Dengan menggunakan motor servo sebagai penggeraknya, servo kontrol sebagai pengendali gerakannya dan sensor ultrasonic, tercipta sebuah robot yang memiliki mobilitas tinggi. Dengan demikian robot ini dapat bergerak horizontal pada bagian basenya, vertical pada bagian lengannya dan menjapit pada bagian grippernya. Sehingga robot ini dapat mengangkat benda dan memilahnya berdasarkan ukuran benda. Robot ini memiliki dimensi 26 cm panjang, 15 cm lebar dan 44 cm tinggi dengan berat 1,5 kg.
Dalam pembuatan Robot ini penyusun mengguakan pemrograman bahasa assembly pada Mikrokontroller AT89s51. Fungsi dari mikrokontroller adalah mengolah data sensor dan mengkontrol pergerakan robot. Robot ini menggunakan 5 buah motor servo untuk bergerak kearah tertentu dan satu buah sensor ultrasonic sebagai pendeteksi keberadaan benda. Robot ini menggunakan adaptor 5 volt sebagai power supply-nya.
Hasil yang dicapai dalam Tugas Akhir ini adalah Robot Lengan yang dapat memilah benda berdasarkan ukuran benda. Waktu tercepat untuk dapat memilha satu benda ke tempat yang disediakan adalah sebesar 5 detik. Selain itu juga robot ini memiliki ketepatan gerak ke berbagai arah dengan cukup akurat.
Kata kunci : Mikrokontroler AT89s51, Sensor Ultrasonik, Servo Kontrol, Motor
Servo.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Keunggulan dalam teknologi robot saat ini tidak dapat dipungkiri dan telah lama dijadikan salah satu icon kebanggaan negara–negara maju. Kecanggihan teknologi yang dimiliki, gedung-gedung tinggi yang mencakar langit, kota-kota yang modern, belum terasa lengkap tanpa kepiawaian dalam dunia robot.
Salah satu aplikasi pada bidang industri adalah pengendalian robot, Robot adalah mesin yang dapat diprogram untuk melaksanakan suatu pekerjaan sesuai dengan program yang dimasukkan kedalam komputer robot. Dengan demikian peranan komputerlah yang menentukan kehandalan kerja robot, semakin canggih komputer (hardware dan software) yang digunakan, maka kehandalan yang dimiliki robot tersebut akan semakin tinggi. Hampir semua industri manufaktur menggunakan robot karena biaya per jam untuk mengoperasikan robot jauh lebih murah dibandingkan menggunakan manusia. Robot memiliki banyak kelebihan yang tidak dimiliki manusia diantaranya yaitu : menghasilkan output yang sama ketika mengerjakan suatu pekerjaan secara berulang-ulang, tidak mudah lelah, ketelitian dan kecepatan menyelesaikan tugas, selain itu juga robot lebih sedikit melakukan kesalahan dibandingkan manusia.
Dalam perancangan dan pembuatan robot, salah satu hal penting yang tidak dapat ditinggalkan adalah sistem pengaturan motor. Tanpa pengaturan Motor yang baik sudah dapat dipastikan Robot tidak dapat bekerja dengan baik, hal ini dikarenakan hampir semua Robot menggunakan Motor sebagai penggeraknya. Pada Robot Lengan, Motor akan dituntut untuk melakukan gerakan-gerakan seperti putaran base, gerakan aktuator naik dan turun, gerakan tangan naik-turun, gerakan gripper memutar dan gerakan gripper menjepit. sistem yang demikian tentunya memerlukan suatu pengaturan Motor yang baik, terlebih bila sistem tersebut dirancang untuk bekerja secara otomatis.
Dengan pengaturan Motor, Sensor Ultrasonik, serta Switch dengan menggunakan mikrokontroller, diharapkan Robot Lengan yang akan dibuat dapat bergerak sesuai dengan mekanis dan tugas dari pada Robot Lengan tersebut.
1.2 Rumusan Masalah
dibuat memiliki kemampuan memilah benda, mengangkat benda dan menempatkan benda yang sudah di angkat ke tempat yang tersedia berdasarkan ukuran benda.
Berdasarkan permasalahan di atas, maka dapat dituliskan rumusan masalah sebagai berikut :
1. Bagaimana cara mengontrol Motor Servo dengan menggunakan Servo Kontrol dan Mikrokontroller AT89s51 sehingga dapat digunakan untuk menggerakkan robot .
2. Bagaimana cara mengontrol Sensor Ultasonik dengan menggunakan Mikrokontroller AT89s51 sehingga dapat digunakan untuk mendeteksi keberadaan benda.
3. Bagaimana cara mengontrol switch yang difungsikan sebagai pemilah benda berukuran besar dan kecil.
4. Bagaimana merancang suatu robot yang dapat membantu kerja manusia memilah benda dan menempatkannya pada tempat yang telah disediakan tanpa harus diperintah berulang-ulang sesuai dengan ukuran benda yang dipilah.
1.3 Batasan Masalah
Batasan-batasan atau ruang lingkup permasalahan yang akan ditangani dalam pembuatan robot lengan yaitu :
1. Pengolahan mikrokontroler pada robot ini terbatas hanya untuk mengontrol putaran motor servo dan sensor ultrasonik saja.
2. Robot lengan ini memilah benda hanya berdasarkan ukuran dari pada benda yaitu besar dan kecil.
3. Robot cerdas ini hanya memindahkan benda ke 2 tempat yang sudah disediakan berdasarkan area kerja robot.
4. Daerah kerja lengan robot di desain sedemikian rupa sehingga memungkinkan tidak adanya kesalahan dalam mengambil benda/obyeknya. 5. Jarak penempatan benda terhadap robot adalah sedemikian rupa sehingga
pada jarak tersebut masih memungkinkan untuk robot bisa menjangkaunya.
6. Dalam pengujian hanya ada 2 benda yang berukuran berbeda.
7. Kecepatan pergerakan robot mengikuti benda disesuaikan dengan kemampuan mikrokontroler, Servo Kontrol dan mekanik robot.
8. Benda yang diangkat oleh robot telah ditentukan spesifikasinya dalam hal bentuk, bahan, berat serta ukuran sesuai dengan kemampuan mekanik robot.
1.4 Tujuan Tugas Akhir
2. Merancang dan membuat prototype Robot Lengan dengan menggunakan mikrokontroller MCS-51 dan Sensor Ultrasonik yang mampu memilah benda berdasarkan ukuran benda yang diangkat.
3. Merancang dan membuat Robot Lengan yang dapat bergerak horizontal (memutar kekiri dan kekanan) pada sendi robot, dan bergerak vertikal (ke atas dan ke bawah) pada bagian aktuatornya.
4. Mencarikan solusi terbaik untuk membantu kerja manusia.
5. Mempermudah dan mempercepat kerja manusia terutama dalam bidang industri.
1.5 Manfaat Tugas Akhir
Adanya tugas akhir ini diharapkan dapat bermanfaat yaitu :
1. Melatih kemampuan mahasiswa untuk memecahkan suatu permasalahan yang ada, terlebih dalam dunia industria yaitu membuat perangkat elektronik jenis robot untuk membantu kerja manusia.
2. Melatih mahasiswa untuk mendesain dan merakit robot.
3. Mahasiswa dapat menerapkan ilmu yang sudah didapat ke dalam dunia kerja. 4. Manfaat dalam dunia industri peti kemas yaitu memilah kontainer-kontainer
yang akan digunakan untuk mengemas barang.
1.6 Metodologi Penulisan
Langkah-langkah pengumpulan data sebagai dasar penyusunan skripsi : 1. Metoda Analisa
Menganalisa masalah-masalah yang akan disajikan dan mengumpulkan data atau informasi.
2. Metoda Literatur
Merupakan usaha untuk lebih memudahkan dalam melengkapi data dan memecahkan masalah yang merupakan sumber referensi bagi penulis dalam mengambil langkah pengamatan dan melengkapi data.
3. Metoda Observasi
Observasi merupakan aktivitas melakukan pengamatan dan analisa terhadap kondisi sebenarnya di lapangan kemudian akan diberikan solusinya.
4. Metoda Evaluasi
Mengevaluasi hasil-hasil yang telah dikerjakan.
1.7 Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini berisikan tentang latar belakang masalah, perumusan masalah, batasan masalah, tujuan, manfaat, dan sistematika penulisan pembuatan tugas akhir ini.
BAB II LANDASAN TEORI
Bab ini menjelaskan tentang teori-teori pemecahan masalah yang berhubungan dan digunakan untuk mendukung dalam pembuatan tugas akhir ini.
BAB III ANALISIS DAN PERENCANAAN
Bab ini dijelaskan tentang tata cara metode perancangan sistem yang digunakan untuk mengolah sumber data yang dibutuhkan sistem antara lain : Flowchart, Desain mekanik.
BAB IV HASIL DAN PEMBAHASAN
Bab ini menjelaskan tentang hasil dan pembahasan yang didapat dari perancangan sistem yang digunakan untuk menyelesaikan tugas akhir ini.
BAB V UJI COBA DAN EVALUASI
Bab ini menjelaskan tentang proses uji coba dari tugas akhir yang dibuat dan juga menjelaskan tentang evaluasi dari hasil ujicoba.
BAB VI PENUTUP
Bab ini berisi kesimpulan dan saran dari penulis untuk pengembangan sistem.
DAFTAR PUSTAKA
Pada bagian ini akan dipaparkan tentang sumber-sumber literatur yang digunakan dalam pembutan laporan tugas akhir ini.
LAMPIRAN
BAB II
LANDASAN TEORI
2.1 Arsitektur AT89s51
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis. Mikrokontroler merupakan komputer didalamm chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara umumnya bisa disebut ”pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini.
1. Register
Register merupakan memori sementara di dalam CPU. Beberapa register mempunyai fungsi tertentu, seperti program counter dan code register, yang lain bersifat lebih umum akumulator, B register. Tiap-tiap komputer memiliki panjang kata yang merupakan karakteristik dari CPU. Seperti pada keluarga MCS ’51 ini besarnya ditentukan oleh bus dan memori internal, oleh karenanya mikrokontroller keluarga MCS ’51 ini memiliki kemampuan menyimpan data 8 bit.
2. ALU (Arithmatic Logic Unit)
Dari namanya dapat diketahui bahwa ALU mampu menjalankan operasi aritmatika dan logika dengan bilangan-bilangan biner. Dalam keluarga MCS ’51 operasi ALU datanya terbatas pada jumlah bilangan biner 8 bit.
3. Unit Pengendali
Unit pengendali digunakan untuk menyerempakkan kerja yang sangat diperlukan oleh setiap prosessor. Sebuah instruksi diambil dan didekode, setelah prosessor mengetahui apa yang dimaksud dengan instruksi, maka unit pengendali akan memberikan signal pada aksi yang dimaksud.
1. Flash program memori ROM internal sebesar 4 Kbyte. Dengan flash PEROM ini mikrokontroller mampu diprogram dan dihapus hingga 1000 kali.
2. Memori data RAM internal sebesar 128 Byte.
3. Kemampuan kerja clock internal dari 0 hingga 24 MHz.
4. Terdapat 2 buah timer/counter yang dapat dipakai hingga 16 Bit.
5. Kemampuan mengalamati memori program dan data maksimum 64 Kbyte eksternal.
6. Dua buah tingkat prioritas interupsi.
7. Lima buah interupsi, yaitu 2 buah interupsi eksternal dan 3 buah interupsi internal.
8. Empat buah I/O masing-masing 8 Bit.
9. Port serial full duplex UART (Universal Asincronous Receive Transmit), dengan kemampuan pendeteksian kesalahan.
10. Mode pengontrolan daya, yaitu :
Mode Idle (daya akan berkurang jika CPU dikehendaki stad by).
Mode Power Down (oscillator berhenti yang berarti daya akan berkurang karena intruksi yang dieksekusi menghendaki power down). 11. Pengembalian ke mode normal setelah power down karena adanya
12. Dapat diprogram per bit sehingga pemrograman akan lebih leluasa dan efektif.
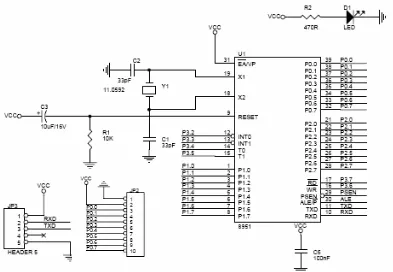
2.1.1. Konfigurasi AT89s51
Pada gambar 2.1 dan gambar 2.2 menunjukkan Susunan kaki pada AT89s51 beserta pin konfigurasinya dan blok diagram AT89s51 dapat dilihat dibawah ini :
Gambar 2.1 : Konfigurasi Pin AT 89s51
Sumber : www.delta-electronic.com
Gambar 2.2 : Blok Diagram AT89s51
Sumber : http://www.toko-elektronika.com/tutorial/uc1.html
Pin Description : 1. VCC
Supply Voltage
2. GND
3. Port 0
Port 0 adalah 8 bit open drain bi-directional port 1/0. Pada saat sebagai port out, tiap pin dapat dilewatkan ke 8 input TTL. Ketika logika 1 dituliskan pada port 0, maka pin-pin ini dapat digunakan sebagai input yang berimpedansi tinggi. Port 0 dapat dikonfigurasikan untuk dimultiplex sebagai jalur data/address bus selama membaca program external dan memori data. Pada mode ini P0 mempunyai internal pull up. Port 0 juga menerima kode bit selama pemrograman flash. Dan megeluarkan kode bit selama ferifikasi program.
4. Port 1
Port 1 adalah 8-bit bi-directional Port 1/0 denga internal pull up. Port 1 mempunyai buffer output yang dapat dihubungkan dengan 4 TTL input. Ketika logika 1 dituliskan ke port 1, pin ini dipull high dengan menggunakan internal pull up dan dapat digunakan sebagai input. Ketika sebagai input, pin port 1 yang secara eksternal dipull low akan mengalirkan arus 1 L karena internal pull up.
Tabel 2.1 : port pin 1
Port Pin Alternate Function
P1.5 MOSI (used for in system programming) P1.6 MISO (used for in system programming) P1.7 SCK (used for in system programming)
5. Port 2
Port 2 adalah 8 bit bi-directional port 1/0 dengan internal pull up. Port 2 output buffer dapat melewatkan 4 TTL input. Ketika logika 1 dituliskan ke port 2, maka mereka dipull high dengan internal pull up dan dapat digunakan sebagai input.
Port 2 memancarkan alamat byte tinggi selama memory program mengambilnya dengan external dan selama akses ke memory data external yang menggunakan alamat 16-bit (MOVX @ DPTR). Pada applikasi ini, port 2 menggunakan tarikan internal naik yang kuat saat ketika memancarkannya. Port 2 juga menerima alamat bit yang tinggi dan beberapa isyarat selama kendali memprogram flash dan verifikasi.
6. Port 3
1 dituliskan ke port 3 maka mereka akan di pull high dengan internal pull up dan dapat digunakan sebagai input. Port 3 juga mempunyai berbagai macam fungsi atau fasilitas. Port 3 juga menerima beberapa sinyal kontrol untuk pemrograman flash dan ferifikasi. Ditunjukkan ke dalam bentuk table sebagai berikut :
Table 2.2 : port pin 3
Port Pin Alternate Functions
P3.0 RXD (serial input port) P3.1 TXD (serial output port) P3.2 INT0 (external interrupt 0) P3.3 INT1 (external interrupt 1) P3.4 T0 (timer 0 external input) P3.5 T1 (timer 1 external input)
P3.6 WR (external data memory write strobe) P3.7 RD (external data memory read strobe)
7. RST
8. ALE/PROG
Address Latch Enable (ALE) merupakan keluaran berdenyut untuk mengunci byte yang rendah serta menunjukkan memory eksternal. Pin ini juga merupakan input pulsa program selama pemrograman flash. Operasi normal dari ALE dikeluarkan pada laju konstan 1/6 dari frekuensi oscilator, dan dapat digunakan untuk pewaktu eksternal atau pemberian pulsa. Jika dikehendaki, operasi ALE dapat didisable dengan memberikan setting bit 0 dari SFR pada lokasi 8 EH. Dengan bit set, ALE dapat diiaktifkan selama instruksi M0VX atau MOVC. Dengan mensetting ALE disabled, tidak akan mempengaruhi jika mikrokontroler pada mode eksekusi eksternal.
9. PSEN
Program store enable merupakan sinyal yang digunakan untuk membaca program pada memori eksternal. Ketika 8951 mengeksekusi kode dari program memori eksternal, PSEN diaktifkan 2 kali setiap siklus mesin, kecuali bahwa 2 aktifasi PSEN terlewati selama pembacaan ke memori data eksternal.
10.EA/VPP
memori yang dimulai pada lokasi 0000H sampai dengan FFFFH. EA harus diposisikan ke VCC untuk eksekusi program internal. Pin ini juga menerima tegangan pemrograman 12Volt (VPP) selama pemrograman flash.
11.XTAL 1
Input oscilator inverting amplifier dan input untuk internal clock untuk pengoperasian 2.
12.XTAL 2
Output dari inverting oscilator amplifier.
2.1.2 Pemrograman Bahasa Assembly MCS
Bahasa assembly menggantikan kode-kode biner dari bahasa mesin dengan ”mnemonic” yang mudah diingat. Misalnya, sebuah instruksi penambahan dalam bahasa mesin disajikan dengan kode ”10110011” yang dalam bahasa assembly dapat disajikan dalam mnemonic ADD, sehingga mudah diingat.
Program Bahasa assembly adalah sebuah program yang terdiri atas
label-label, mnemonic dan lain sebagainya. Masing – masing pernyataan berhubungan dengan instruksi mesin. Bahasa Assembly, sering juga disebut kode sumber (source code) atau kode simbolik (Symbolik code) tidak dapat dijalankan ole prosesor.
Program Bahasa Mesin adalah sebuah program yang mengandung kode –
kode biner yang merupakan instruksi yang bisa dipahami prosesor. Program bahasa mesin sering disebut sebagai kode objek, dapat dijalankan (dikerjakan) oleh prosesor.
Assembler adalah suatu program yang dapat menerjemahkan program
bahasa assembly ke program bahasa mesin. Proggram dalam bahasa mesin ini dapat berbentuk ”absolute” atau ”relocatable”. Berikutnya dilakukan ”linking” untuk mengatur alamat absolute agar program dapat dijalankan. Linker adalah suatu program yang dapat menggabungkan program –
program objek modul – modul dan menghasilkan suatu program objek absolute yang dapat dijalankan oleh prosesor.
Segmen adalah suatu unit memory kode atau data. Sebuah segmen dapat
Modul adalah mengandung satu atau lebih segmen. Sebuah odul memiliki
nama yang ditentukan oleh pengguna. Definisi modul menentukan jangkauan symbol – symbol local. Sebuah berkas objek dapat berisi lebih dari satu modul.
Program merupakan modul absolute tunggal, menyatakan semua segmen
absolute dan relocatable dari modeul –modul yang terlibat. Sebuah program hanya mengandung kode – kode biner instruksi – instruksi (dengan alamat – alamat dan konstanta data) yang dapat dipahami komputer.
2.1.3 Timer dan Counter
Pada dasarnya saran masukan yang satu ini merupakan seperankat pencacah biner (biner counter) yang terhuung langsung ke saluran data mikrokontroller, sehingga mikrokontroler dapat pula merubah kondisi pencacah tersebut.
pewaktu. Jika sebuah pencacah bekerja dengan frekuensi yang bervariasi dikatakan pencacah tersebut bekerja sebagai counter. Kondisi pencacah tersebut menyatakan banyaknya pulsa detak yang sudah diterima. Untai pencacah biner tersebut merupakan pencacah biner naik (count up binary counter).
2.1.4 Rangkaian Small System AT89s51
Merupakan rangkaian yang digunakan untuk mengoperasikan dari pada mikrokontroller AT89s51. Dapat dilihat pada gambar 2.3 berikut.
Gambar 2.3 : Skema Rangkaian Small System AT89s51
2.2 Servo Kontrol DSR-08
Merupakan Modul servo controler yang digunakan untuk mengendalikan putaran motor servo dimana perangkat elektronik ini memiliki kelebihan yaitu feedback feature yaitu mendeteksi seberapa banyak motor berputar. Skema rangkaian Servo Kontrol DSR-08 dapat dilihat pada gambar 3.3 berikut :
Gambar 2.4 : Skema Rangkaian Servo Controller DSR-08
Sumber : www.delta-electronic.com
BAGIAN-BAGIAN Servo Kontrol DSR-08 :
SRV1-SRV8 : Konektor yang menghubungkan modul ini dengan
SRV9-SRV16 : Input feedback dari encoder 1 hingga 8
SRV17-SRV24 : Input Sensor 1 hingga 8
ISP Port : Konektor untuk pemrograman firmware dari Servo
Control melalui ISP Port
Serial : Konektor yang menghubungkan modul ini dengan
port serial system mikrokontroler, kabel RS232 atau USB to RS232 Converter.
Berikut merupakan tampilan dari Servo Kontrol DSR-08 dapat dilihat pada gambar 2.5 dibawah ini :
Gambar 2.5 : Servo Kontrol DSR-08
2.3 Motor Servo
Servo memiliki 3 kabel, yaitu Vcc, ground, dan PW input. Tidak seperti PWM pada DC motor, inpit sinyal untuk servo tidak digunakan untuk mengatur kecepatan, tetapi digunakan untuk mengatur posisi dari putaran servo.
Servo motor standart dilengkapi dengan motor DC untuk mengendalikan posisi sebuah robot/diposisikan hingga 180 derajat. Motor tersebut harus dapat menangani perubahan yang cepat pada posisi, kecepatan, dan percepatan, serta harus mampu menangani intermittent torque. Berikut merupakan tampilan dari Motor Servo dapat dilihat pada gambar 2.6 dibawah ini :
Gambar 2.6 : Motor Servo
2.4 Sensor Ultrasonik Modul Dsonar
tindakan yang harus dilakukan. Salah satunya yaitu sensor pengukuran jarak. Sensor ini merupakan salah satu element paling penting pada sebuah robot yang sedang bergerak. Hal ini dibutuhkan oleh robot untuk mengetahui posisi robot terhadap objek-objek tertentu.
Dengan Sensor Ultrasonik D-Sonar, mikrokontroler yang menjadi otak robot hanya perlu melakukan sebuah penyulutan saja. Mikrokontroler pada D-Sonar akan membangkitkan sinyal ultrasonik dan melakukan perhitungan seperti yang telah dijelaskan sebelumnya. Hasil perhitungan akan dikonversi menjadi sebuah pulsa, dimana lebar pulsa akan menentukan jarak yang diperoleh. Otak robot hanya perlu menghitung lebar pulsa tersebut untuk memperoleh nilai jarak antara sensor dengan objek.
Gambar 2.7 : Pantulan gelombang ultrasonik Sumber : www.delta-electronic.com
Gambar 2.8 : Sensor Ultrasonik Dsonar
2.5 Tenaga/Power Sebuah Robot
Baterai adalah tenaga penggerak robot yang paling banyak digunakan karena penggunaannya sangat mudah. Ada banyak sekali jenis baterai untuk menggerakkan sebuah robot, tetapi beberapa jenis baterai sangat umum digunakan adalah carbon-zinc, alkalin, nickel-cadmium, lead-acid, dan lithium.
Tenaga lain dari sebuah robot adalah dengan menggunakan Power Supply yaitu dengan mengkonversi tengangan bolak balik (AC) menjadi tegangan searah (DC).
Gambar 2.9 : Catu Daya +5 volt
Sumber : Buku Mudah dan Menyenangkan Belajar Mikrokontroller, karangan
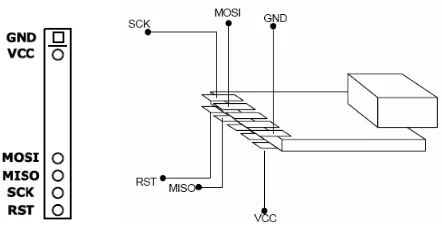
2.6 Programmer DU-ISP V2.0
Merupakan unit programmer ISP dengan antarmuka USB dan didesain dengan kecepatan download program yang tinggi dan dengan bentuk yang ringkas. Dalam Programmer DU-ISP V2.0 terdapat ISP Port yang merupakan bagian konektor untuk pengisian program secara ISP dengan susunan I/O standart DST dan kompatibel dengan Delta ISP Cable.
Gambar 2.10 : Layout DU ISP Sumber : www.delta-elektrornik.com
Spesifikasi :
1. Kompatibel Code Vision, AVR Studio dan AVR Dude
2. Support untuk semua jenis AVR type AT89Sxx, ATTinyxx, ATMegaxx dan keluarga MCS-51 AT89S5x
4. Kecepatan transfer program 128Kb/menit
Berikut merupakan tampilan dari Programmer DU-ISP V2.0 dapat dilihat pada gambar 2.11 dibawah ini :
Gambar 2.11 : Programmer DU-ISP V2.0
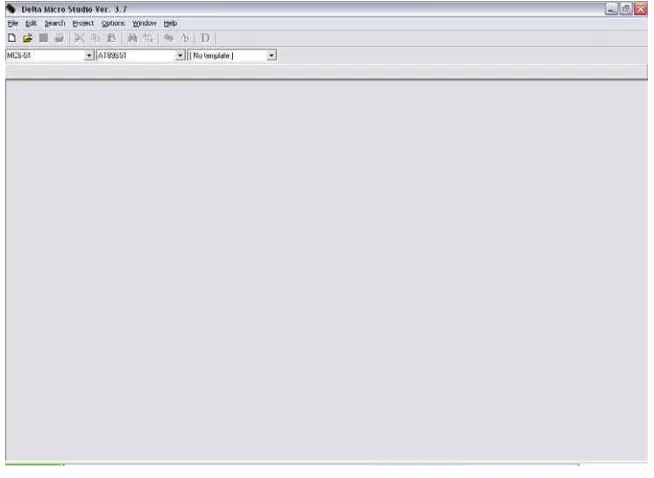
2.7 Pemrograman Assembly dengan menggunakan DStudio 3.7b
Gambar 2.12 : Tampilan Utama Dstudio 3.7b
2.8 AVR Studio 4
AVR studio 4 merupakan software buatan atmel corporation. Software ini bisa digunakan untuk menuliskan program bahasa assembly, mensimulasikan program program yang dibuat dan kemudian mendebug program sehingga menghasilkan file dengan extensi . hex yang bisa di download ke dalam IC Mikrokontroller.
Edit, Debug, View, Window dan help. Menu-menu tersebut merupakan tool yang
kita perlukan untuk membangun aplikasi yang menggunakan mikrokontroller. Software ini juga sudah difasilitasi dengan program untuk melakukan simulasi terhadap proyek yang dibuat, sehingga programming menjadi menyenangkan walaupun yang diprogram bahasa assembler dan bukan dalam bahasa C. Gambar 2.13 dibawah ini adalah gambar tampilan utama dari AVR studio 4 saat pertama kali dijalankan.
BAB III
ANALISIS DAN PERENCANAAN
Setelah melakukan penelitian menggunakan Mikrokontroler AT89s51, Servo
Kontrol DSR-08, Sensor Ultrasonik Dsonar sebagai pendeteksi keberadaan benda,
dan Switch yang digunakan sebagai pemilah benda, maka pada bab ini akan
membahas analisis dan perencanaan dari Robot Lengan ini. Pembahasan dimulai
dengan Analisis Sistem, perancangan hardware kemudian diikuti dengan flowchart
software pendukung.
3.1 Analisis Sistem
Robot Lengan ini merupakan gabungan dari beberapa hardware yaitu
Mikrokontroller AT89s51, Servo Kontrol DSR-08, Sensor Ultrasonik Dsonar dan 2
buah switch. Tiap-tiap perangkat hardware tersebut memiliki tugas yang
berbeda-beda sesuai dengan spesifikasi kerja hardware masing-masing. Oleh karena itu
dibutuhkan software pendukung untuk menterjemahkan dari bahasa manusia ke
bahasa mesin. Perangkat lunak tersebut yaitu DStudio 3.7b sebagai editor dan AVR
Proses bergeraknya robot yaitu atas dasar perintah-perintah yang dikeluarkan
oleh mikrokontroller. Awal mula proses kerjanya yaitu ketika sensor ultrasonik
menerima perintah untuk menemukan benda oleh mikrokontroller dalam radius yang
sudah ditentukan, kemudian sensor tersebut akan mengirim pesan pada
mikrokontroller bahwa benda terdeteksi, maka mikrokontroller tersebut akan
memerintahkan Servo Kontrol untuk menggerakkan Motor Servo Robot. Ketika
proses pengambilan benda tepatnya pada waktu penjapit (gripper) menjapit benda
secara tidak langsung dia juga melakukan analasi ukuran benda tersebut dengan
menggunakan Switch. Setelah proses penganalisaan dan diketahui ukuran benda
tersebut maka mikrokontroller akan memerintahkan Servo Kontrol untuk menaruh
benda sesuai dengan penganalisaan ukuran bendanya, yaitu benda besar ditaruh pada
tempat yang disediakan khusus benda ukuran benda besar, dan benda ukuran kecil
ditaruh pada tempat yang disediakan khusus benda ukuran kecil. Proses tersebut akan
berulang-ulang dilakukan sampai Sensor ultrasonik tidak mendeteksi keberadaan
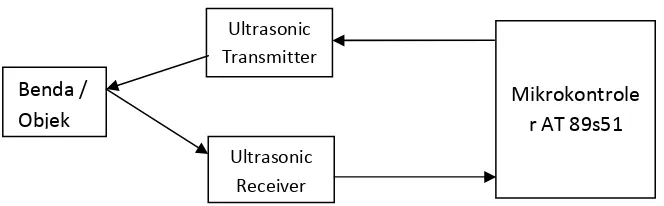
3.2 Diagram Blok Penelitian
Switch
Mikrokontroler AT89s51
Servo Controller DSR‐08
PLN Power Supply Sensor Ultrasonik
Dari gambar 3.1 dapat dilihat bahwa Robot lengan ini bekerja dengan
menggunakan mikrokontroler AT89s51 sebagai otak dari pada robot tersebut dan
sensor ultrasonik sebagai pendeteksi jarak benda. Ketika sensor Ultrasonik
mendeteksi benda dalam jarak 14 cm maka Robot ini akan bekerja yaitu dengan
menjulurkan lengannya untuk mengambil benda yang ada didepannya. Apabila
ultrasonic mendeteksi benda jaraknya lebih atau kurang dari 14 cm maka robot ini
Pada robot lengan ini juga terdapat penjapit (gripper) yang berfungsi sebagai
penjapit benda. Penjapit inilah yang bertugas untuk memilah benda antara benda yang
berukuran kecil dan benda yang berukuran besar.
3.3 Area Kerja Robot Lengan
Area kerja merupakan lingkungan dimana tempat robot bekerja. Berikut
merupakan gambar dari rung kerja Robot Lengan, dapat dilihat pada gambar
dibawah ini:
D. Jarak Robot ke tempat benda kecil = 12 cm
E. Jarak Robot ke tempat benda yang dipilah = 20,5 cm
3.4 Perancangan Diagram Mekanik Robot Lengan
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik.
Robot yang memiliki kemampuan navigasi dan manipulasi secara relative memiliki
konstruksi mekanik yang lebih rumit dibanding dengan yang berkemampuan navigasi
saja.
3.4.1 Perancangan Dimensi Robot Lengan
Pada perancangan dimensi robot lengan ini akan dibahas beberapa bagian
yaitu bagian kerangka mekanik, bagian sensor, dan gerak.
a. Kerangka mekanik
1. Kerangka Box
Kerangka Box merupakan pondasi utama Robot
Lengan. Selain itu juga pada Box ini dipakai untuk tempat
rangkaian elektronika seperti Rangkaian AT89s51 dan Servo
Kontrol DSR-08. Adapun gambar Kerangka Box dapat dilihat
15 cm
3,5 cm 15 cm
26 cm
Gambar 3.3 : Kerangka Box
2. Penyangga Utama
Penyangga Utama merupakan bagian penting dari
Robot Lengan. Yaitu sebagai penopang robot pada waktu
mengangkat benda. Penyangga utama dapat dilihat pada
gambar 3.4 dibawah ini :
5,7 cm
14,8 cm
Gambar 3.4 : Penyangga Utama (aktuator)
3. Penyangga Kedua
Penyangga kedua merupakan bagian yang penting
4,5 cm
14,5 cm
Gambar 3.5 : Penyangga Kedua (lengan)
4. Lantai Penyangga
Lantai Penyangga merupakan bagian untuk berputarnya
robot kekanan dan kekiri, selain itu juga pada lantai penyangga
ini digunakan sebagai tempat berdirinya tiang penyangga
utama. Bentuk dan ukuran dari lantai penyangga dapat dilihat
pada gambar 3.6 dibawah ini :
15 cm
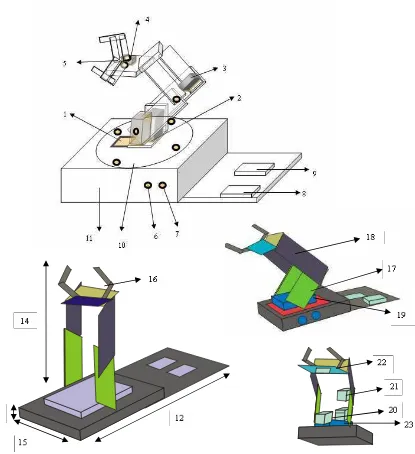
Untuk lebih jelasnya, keseluruhan gambar diagram mekanik
perencanaan robot lengan yang dibuat dapat dilihat pada gambar 3.7
dibawah ini :
Keterangan Gambar :
7. Jack Power Supply
8. Servo Control DSR-08
9. Small System AT89s51
10.Lantai Penyangga Box
11.Box
12.Panjang robot 26 cm
13.Tinggi box 3,5 cm
14.Tinggi robot 45 cm
15.Lebar robot 15 cm
16.Gripper dengan ukuran 5 cm x 4,5 cm, penjapit dengan ukuran
8 cm x 1 cm. Penyangga penjapit dengan ukuran 6 cm x 1 cm.
17.Siku dengan ukuran 14,8 cm x 5,7 cm
18.Lengan dengan ukuran 14,5 cm x 4,5 cm
19.Base dengan ukuran 15 cm x 15 cm
20.Bagian bahu bergerak naik dan turun (vertikal).
21.Bagian siku bergerak naik dan turun (vertikal).
22.Bagian gripper Bergerak menjapit benda (horizontal).
b. Bagian Sensor
Robot lengan ini terdiri dari sebuah sensor ultrasonik. Sensor
ultrasonik ini dipasang di depan robot lengan dengan jarak 14 cm dari
benda yang akan diambil. Digunakan unntuk mendeteksi keberadaan
benda.
Untuk menjadikan robot ini dapat bekerja sebagaimana yang
diharapkan, maka digunakan variasi gerakan dari masing-masing
motor servo untuk menghasilkan arah pergerakan robot. Bagian base
akan berputar secara horisontal yaitu kekanan dan kekiri, bagian
lengan akan bergerak vertikal ke atas dan kebawah untuk menjangkau
benda dan bagian gripper akan bergerak horisontal yaitu kekanan dan
kekiri untuk menjapit dan melepaskan benda. Berikut adalah sudut
putaran pada waktu robot mengambil dan menempatkan benda.
1. Mengambil benda
Posisi sudut putaran motor servo ketika robot sedang
Tabel 3.1 : posisi sudut putaran motor servo untuk mengambil benda.
Motor Servo Sudut Putaran (step)
Servo 1 Step 6 (22,5º)
Servo 2 dan 3 Step 8 dan 12 (90 º)
Servo 4 Step 11 (90 º)
Servo 5 Step 10 (67,5 º)
Posisi sudut putaran motor servo ketika robot sedang
mengangkat benda dapat dilihat pada tabel dibawah ini :
Tabel 3.2 : posisi sudut putaran motor servo untuk mengangkat benda
Motor Servo Sudut Putaran (step)
Servo 1 Step 6 (22,5º)
Servo 2 dan 3 Step 12 dan 8 (90 º)
Servo 4 Step 7 (90 º)
Servo 5 Step 10 (67,5 º)
Posisi sudut putaran motor servo ketika robot sedang menaruh
Tabel 3.3 : posisi sudut putaran motor servo untuk menaruh benda pada tempat A.
Motor Servo Sudut Putaran (step)
Servo 1 Step 9 (67,5º)
Servo 2 dan 3 Step 8 dan 12 (90 º)
Servo 4 Step 11 (90 º)
Servo 5 Step 13 (67,5 º)
Posisi sudut putaran motor servo ketika robot sedang menaruh
benda pada tempat B dapat dilihat pada tabel dibawah ini :
Tabel 3.4 : posisi sudut putaran motor servo untuk menaruh benda pada tempat B.
Motor Servo Sudut Putaran (step)
Servo 1 Step 12 (135)
Servo 2 dan 3 Step 8 dan 12 (90 º)
Servo 4 Step 11 (90 º)
Servo 5 Step 13 (67,5 º)
3.4.2 Perancangan Small Sistem AT89s51
Small sistem At89s51 merupakan otak dari pada robot lengan. Dimana
pada baian ini berfungsi mengendalikan keseluruhan rangkaian elektronik
pengendalian dari Robot Lengan ini. Dapat dilihat pada gambar 3.8 dibawah
ini :
Gambar 3.9 : Tata Letak Komponen Rangkaian AT89s51
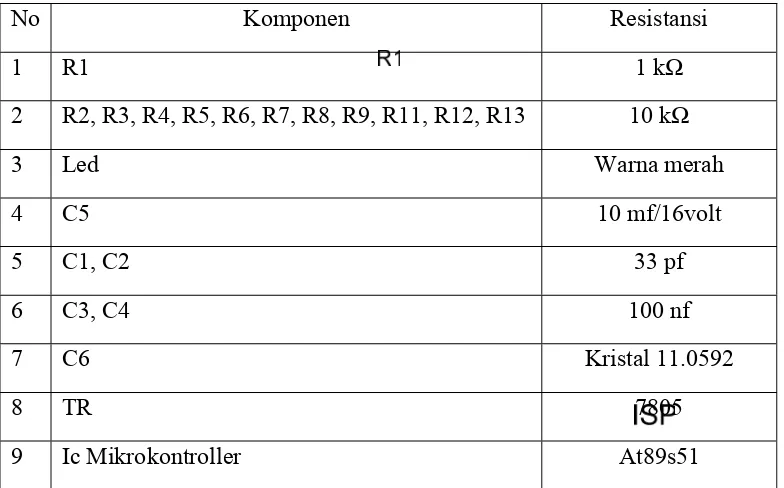
Tabel 3.5 : Keterangan Gambar komponen small system AT89s51
No Komponen Resistansi
1 R1 1 kΩ
2 R2, R3, R4, R5, R6, R7, R8, R9, R11, R12, R13 10 kΩ
3 Led Warna merah
4 C5 10 mf/16volt
5 C1, C2 33 pf
6 C3, C4 100 nf
7 C6 Kristal 11.0592
8 TR 7805
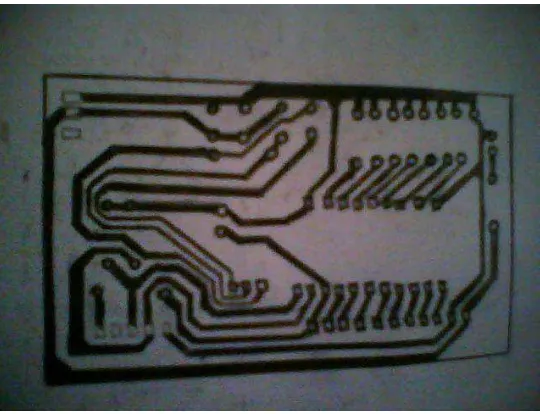
Pada waktu menggambar disarankan untuk membuat jalur yang tidak
terlalu kecil sehingga dalam pelarutan nanti tidak hilang gambar jalurnya Dan
juga ketebalan dalam menggambar sangat dianjurkan. Pada waktu proses
mencetak dan melarutkannya agar lebih hati-hati. Berikut ini merupakan
gambar jalur rangkaian AT89s51 dapat dilihat pada gambar 3.9 dibawah ini :
Gambar 3.10 : Jalur Rangkaian Small Sistem AT89s51
3.5 Daftar Komponen dan Alat yang dipergunakan
Adapun komponen-komponen yang akan digunakan dalam pembuatan modul
Tabel 3.6 : Komponen yang diperlukan
No Nama Komponen Jumlah satuan
1 IC Mikrokontroler AT89s51 1 buah
2 Socket IC AT89s51 1 buah
11 Ferri Chlorida Secukupnya
12 Rugos gambar kaki komponen 1 lembar
21 Kabel pita Secukupnya
22 Timah Secukupnya
23 Dioda Photo 1 buah
Peralatan yang digunakan sebagai sarana pendukung dalam pembuatan tugas
akhir ini dapat disebutkan sebagai berikut :
Tabel 3.7 : Peralatan yang diperlukan
No Nama Peralatan Jumlah
3.6 Diagram Alur Sistem
Gambar 3.11 : Diagram Alur Sistem
Pada Robot Lengan ini mikrokontroller yang digunakan adalah AT89s51
sebagai sistem pemroses semua perangkat. Alur daripada system adalah Ketika saklar
on/off dinyalakn pada posisi On maka tegangan akan masuk keseluruh rangkaian
elektronika. Pada kondisi seperti ini mikrokontroller yang sedang aktif akan
memerintahkan sensor Dsonar untuk mengukur jarak benda yang ada didepannya.
Saat informasi jarak ditemukan maka sensor Dsonar akan mengirimkan pesan data
pada mikrokontroller. Kemudian mikrokontroller akan memerintahkan Servo Kontrol
bersamaan waktu mengambil benda yaitu saat gripper/penjapit robot menjapit
bendanya switch akan melakukan proses pengecekan ukuran. Dari switch ini akan
diketahui ukuran benda yang di ambil untuk kemudian ditempatkan pada tempat yang
disediakan sesuai dengan ukuran benda tersebut.
3.7 Diagram Alur Sensor Ultrasonik Dsonar
Gambar 3.12: Diagram Alur Sensor Ultrasonik Dsonar
Ketika saklar dalam posisi on maka Mikrokontroller dan sensor Dsonar akan
dalam keadaan aktif. Mikrokontroller ini akan memerintahkan sensor Ultrasonik
didepannya maka dsonar ini akan mengirimkan pesan pada mikrokontroller bahwa
benda ditemukan. Dan apabila tidak ada benda didepannya maka sensor ini akan
melakukan pengukuran secara berulang-ulang sampai sinyal terpantul oleh benda
yang ditemukan.
3.8 Diagram Alur Servo Kontrol DSR-08
Untuk menggerakkan motor servo dibutuhkan rangkaian driver motor. Pada
robot ini rangkaian driver motornya adalah Servo Kontrol DSR-08. Ketika benda
ditemukan maka mikrokontroller akan mengirimkan pesan data pada Servo kontrol
untuk menggerakkan Motor Servo. Motor servo ini akan bergerak secara bergantian
sesuai dengan yang diperintahkan oleh mikrokontroller. Yaitu bergerak menuju
step-step yang sudah ditentukan.
3.9 Diagram Alur Switch
Gambar 3.14 : Diagram Alur Switch
Pada saat Motor servo bergerak, tepatnya ketika Motor Servo pada bagian
gripper mengambil benda maka akan dilakukan proses pengecekan ukuran. Ini
sebagai benda berukuran kecil dan akan ditempatkan pada tempat B, Tetapi apabila
pada waktu menjapit switch tidak terhubung maka benda tersebut dikatakan benda
berukuran besar dan akan ditempatkan pada tempat A.
3.10 Diagram Alur Proses Downloader ke Mikrokontroller AT89s51
Gambar 3.15 : Diagram Downloader
Untuk membuat mikrokontroller bekerja terlebih dahulu butuh proses
pentransferan data dari bahasa manusia ke dalam bahasa mesin. Untuk itu butuh yang
namanya downloader. File hasil eksekusi .asm menghasilkan file .hex. file ini yang
BAB IV
HASIL DAN PEMBAHASAN
4.1 Implementasi Sistem
Dalam pembahasan implementasi system ini akan menjelaskan mengenai proses pembuatan dari Robot Lengan. Pembahasan dimulai dengan pembuatan hardware Small System AT89s51, instalasi komponen elektronika, pengujian perangkat keras, Perakitan Robot, pengujian perangkat lunak, pengujian system control dan analisa Robot Lengan yang dibuat.
4.1.1 Pembuatan PCB (Printed Circuit Board) Small Sistem AT89s51
Sebelum membuat PCB dibutuhkan skema rangkaian Small system AT89s51 yang dapat dilihat pada gambar 4.1 diatas. Berikut tahapan dalam membuat PCB Small System AT89s51 :
1. Buat jalur rangkaian.
2. Potonglah PCB kosong sesuai dengan ukuran 10 cm x 5 cm.
Gambar 4.1 : layout belakang
4. Larutkan feryclorida secukupnya pada tempat yang sudah disediakan.
5. Larutkan PCB yang sudah digambar tadi ke dalam larutan feryclorida, sambil digoyang-goyang perlahan sampai tembaga yang tidak digambar hilang sehingga terbentuk jalur PCB yang di inginkan.
Gambar 4.3 : Hasil PCB yang sudah dilarutkan
6. Setelah dilarutkan, bersihkan jalur rangkaian yang di spidol tadi dengan amplash yang halus
7. Bor PCB yang sudah dibersihkan dengan menggunakan bor ukran 1 mm sesuai dengan tata letak kaki komponen yang dibuat.
4.1.2 Instalasi Komponen Small System AT89s51
Gambar 4.5 : Rankaian mikrokontroller yang sudah di instalasi
Instalasi komponen small system AT89s51 ini sesuai tata letak komponen yang telah direncanakan sebelumnya. Proses intalasi ini menghubungkan kaki-kaki komponen dengan menggunakan timah panas yang disolder dengan suhu 30 sampai 40 watt. Penggunaan solder yang telalu panas mengakibatkan rusaknya komponen. Sehingga cukup memakai daya yang kecil.
4.2 Pengujian Perangkat Keras
4.2.1 Pengujian small system At89s51
Pengujian minimum sistem dapat dilakukan secara hardware maupun secara software. Adapun proses pengujian perangkat keras ini dimulai dengan pengujian Mikrokontroller AT89s51 yang berperan sebagai pusat control dan unit pemrosesan data. Kemudian setelah itu dilakukan pengujian secara software yaitu dengan pengujian program sederhana untu menguji fungsi I/O port melalui gerak Motor Servo.
A. Tujuan Pengujian
1. Untuk mengetahui koneksi antar komponen sudah terhubung dengan baik dan masing-masing komponen dapat digunakan sebagaimana mestinya.
2. Untuk mengetahui apakah system dari rangkaian Mikrokontroller sedah dapat menerima data(input), mengolah data(input), serta mengeluarkan output sesuai dengan yang telah direncanakan.
B. Prosedur Pengujian
1. Menyiapkan rangkaian dari system Mikrokontroller
2. Menghubungkan Vcc dan Gnd rangkaian pada Power Supply (5 Volt).
lampu Led tidak menyala berarti masih belum ada tegangan yang masuk ke rangkaian.
4.2.2 Pengujian Servo Control modul DSR-08
Pengujian perangkat keras berikutnya adalah Servo Kontrol DSR-08. Seperti yang telah dikemukakan dalam landasan teori bahwa Servo Kontrol memiliki peranan yang sangat penting dalam system pengendalian Motor Servo yaitu bertindak sebagai interface antara Mikrokontroller dengan Motor Servo.
A. Tujuan Pengujian
Untuk mengetahui apakah rangkaian Servo Kontrol telah bekerja dengan baik dan mampu mengendalikan Motor Servo memutar sesuai dengan yang diharapkan.
B. Prosedur Pengujian
1. menghubungkan rangkaian Servo Kontrol DSR-08 dengan Power Supply dan Mikrokontroller AT89s51.
2. Menghubungkan Output dari Servo Kontrol ke Motor Servo
4.2.3 Pengujian Motor Servo
Pengujian Perangkat keras berikutnya adalah Motor Servo, Seperti yang telah dijelaskan dalam landasan teori bahwa Motor Servo memiliki peranan yang penting dalam Robot Lengan ini, karena berfungsi sebagai penggerak dari pada Robot.
A. Tujuan Pengujian
Untuk mengetahui apakah Motor Servo telah bekerja dengan baik dan mampu memutar sesuai dengan yang diharapkan.
B. Prosedur Pengujian
1. Menghubungkan Motor Servo ke rangkaian Servo Kontrol DSR-08 dengan Power Supply dan Mikrokontroller AT89s51.
2. Menghubungkan Output dari Servo control ke Motor Servo
3. Melakukan Pengamatan pada arah putaran Motor Servo terhadap perubahan inputan.
4.2.4 Pengujian Sensor Ultrasonik modul Dsonar
A. Tujuan Pengujian
Untuk mengetahui apakah Sensor Untrasonik modul Dsonar ini telah bekerja dengan baik dan mampu mendeteksi benda dengan menghitung jarak sesuai dengan yang diharapkan.
B. Prosedur Pengujian
1. Menghubungkan rangkaian Sensor Ultrasonik modul Dsonar dengan Power Supply dan Mikrokontroller AT89s51.
2. Menghubungkan Output dari Mikrokontroller ke Sensor Ultrasonik. Untuk lebih mudahnya bisa memakai modul DST-52 sebagai tambahan dari modul Dsonar, sehingga kita bisa mengukur jarak langsung karena pada modul DST-52 terdapat LCD yang menampilkan jarak benda secara langsung.
4.2.5 Pengujian Switch
A. Tujuan Pengujian
Untuk mengetahui bahwa switch dalam kondisi bagus dan layak untuk digunakan, sehingga Robot dapat bekerja dengan baik sesuai dengan yang diharapkan.
B. Prosedur Pengujian
1. Menghubungkan Switch
2. Menghubungkan Port po.0 dari Mikrokontroller ke Switch.
3. Melakukan pengamatan pada besarnya tegangan yang masuk.
4.3 Perakitan Robot
Tahap perakitam merupakan tahap menggabungkan seluruh komponen-komponen pembentuk robot lengan. Dimulai dengan merakit kerangka mekanik, instalasi komponen elektronika, hingga instalasi kabel-kabel penghubung rangkaian dan panel. Tahap-tahap merakitan robot lengan adalah sebagai berikut:
Gambar 4.6 : Mur penyangga
2. Pasang mur penyangga pada bagian box robot yang sudah dibuat seperti gambar 4.6 dibawah ini :
Gambar 4.7 : Instalasi mur penyangga
Gambar 4.8 : Instalasi Motor Servo 1
4. Pasang atap box, kemudian kencangkan dengan baut sesuai mur tiang penyagga utama sehingga membentuk box. Dapat dilihat pada gambar 4.9 dibawah ini :
Gambar 4.9 : Memasang atap box
Gambar 4.10 : instalasi mur penyangga dua
6. Pasang lantai dasar ke motor servo satu, sehingga terlihat seperti gambar 4.11 dibawah ini :
Gambar 4.11 : Memasang lantai dasar pada motor servo 1
Gambar 4.12 : Instalasi lantai dan motor servo 2 dan 3
8. Pasang penyagga utama kanan pada motor servo 2, sehingga tampak seperti gambar 4.13 dibawah ini :
9. Pasang penyangga kiri pada motor servo 3, kemudian kencangkan dengan mur baut, seperti gambar 4.14 dibawah ini :
Gambar 4.14 : Instalasi penyangga utama kiri ke motor servo 3
10. Agar penyangga kiri bisa bergerak sama seperti penyangga utama kanan maka perlu diberi penopang. Tampak terlihat seperti gambar 4.15 dibawah ini :
11.Rakitlah motor servo 4 dengan tiang lengan, seperti terlihat pada gambar 4.16 dibawah ini :
Gambar 4.16 : Instalasi penyangga dua kiri dan motor servo 4
12.Pasang lengan kanan (penyangga dua kanan), kemudian kuatkan dengan mur baut. Sehingga terlihat seperti gambar 4.17 dibawah ini :
13.Merakit tempat gripper (penjapit) dan motor servo 5, seperti terlihat pada gambar 4.18 dibawah ini :
Gambar 4.18 : Instalasi motor servo 5 Gripper
14. Siapkan kerangka mekanik penjapit robot, seperti gambar 4.19 :
Gambar 4.19 : Kerangka Gripper
Gambar 4.20 : Gripper yang sudah dirakit
16. Kerangka mekanik yang sudah dirakit akan tampak seperti gambar 4.21
dibawah ini :
Gambar 4.21 : Mekanik robot lengan yang sudah dirakit
Gambar 4.22 : instalasi komponen elektronika
18.Instalasi mekanik robot dan komponen elektronika yang sudah selesai akan tampak seperti gambar dibawah ini, terlihat dari samping kanan, depan dan belakang :
Gambar 4.23 : Robot Lengan yang sudah dirakit keseluruhan tampak
4.4 Penjelasan Perangkat Lunak
Pada penjelasan perangkat lunak kali ini akan dibahas tentang implementasi program yang merupakan hasil dari analisa dan perancangan sistem pada bab sebelumnya. Implementasi program ini ditujukan untuk Robot dalam berinteraksi dengan sistem yang dihasilkan.
Sebelum memulai penjelasan harus melewati beberapa tahap untuk dapat menyelesaikan Robot Lengan ini. Adapun tahap-tahap yang harus dilalui antara lain yaitu :
1. Menghubungkan port Mikrokontroler dengan Komputer menggunakan downloader Du-ISP v2.
2. Mengisi data program Mikrokontroler AT89s51.
4.4.1 Menghubungkan Port Mikrokontroller dengan Komputer
pengenalan perangkat. setelah terhubung proses downloader sudah bisa dilakukan. Yaitu dengan mengeksekusi file .hex.
Gambar 4.24 : Port Downloader DU-ISP v2 ke Port Mikrokontroller
4.4.2 Mengisi Data Program Mikrokontroler AT89s51
Mikrokontroler sebagai pengendali dari alat-alat yang lain sehingga didalam mikrokontroler membutuhkan perintah-perintah yang akan digunakan untuk menjalankan sensor sensor ultrasonic, Servo Kontrol dan motor servo.
Penggunaaan mikrokontroler dengan komputer harus memenuhi semua alat yang dibutuhkan, apabila terdapat salah satu alat yang tidak berfungsi maka perangkat lunak AVR Studio 4 tidak mendeteksi mikrokontroler atau muncul pesan “hardware error”.
2. Buka DStudio 3.7b setelah itu compile, maka hasil compile tersebut akan menghasilkan file .hex. file ini yang nantinya akan digunakan untuk di convert kedalam mikrokontroller dengan downloadernya.
3. Buka AVR Studio 4 setelah itu lakukan setting port yang digunakan. Seperti terlihat pada gambar dibawah ini :
Gambar 4.25 : Setting port mikrokontroller
Gambar 4.26 : Read signature
Gambar 4.27 : Proses downloader program ke mikrokontroller
BAB V
UJI COBA
Setelah proses instalasi mekanik dan komponen dilakukan pada bab sebelumnya, maka berikutnya pada bab ini akan menjelaskan mengenai proses uji coba dari Robot Lengan yaitu meliputi cara pengoperasian robot, uji coba robot menggunakan benda dan evaluasi dari ujicoba yan dilakukan.
5.1 Cara Pengoperasian Robot
Awal mula untuk mengaktifkan robot lengan ini yaitu dengan menghubungkan tengangan dari power supply ke servo kontrol, maka semua komponen akan aktif dan robot akan berjalan sesuai dengan program yang dimasukkan kedalam mikrokontroller. Dengan aktifnya mikrokontroller, maka mikrokontroller tersebut akan memerintahkan sensor untuk mendeteksi keberadaan benda. Adapun potongan program tersebut :
lcall CekSonar
Mov R0,#Buffer+5 ;cek data valid?
mov A,@R0
Mov R0,#Buffer+7 ;cek kurang dari 10cm?
mov A,@R0
cjne A,#10,$+3
jnb p0.0,loop
Setelah benda ditemukan maka sensor akan mengirimkan pesan pada mikrokontroller bahwa benda telah terdeteksi. Setelah itu mikrokontroller akan memerintahkan Servo kontrol untuk menggerakkan motor servo.
Sebelumnya motor servo tersebut sudah di set sedemikian rupa kemana dia harus berhenti dan berputar. Berikut potongan programnya :
servo_gripper_buka
db 01,04,13
servo_gripper_tutup
db 01,04,10
Dimana pada table pertama menerangkan nomor servo kontrol, nomor motor servo yang mau digerakkan dan sudut motor servo yang akan bergerak. Pada motor servo ini step yang bisa dilakukan antara step 5 minimal sampai step 13 maksimal.
Mov DPTR,#servo_gripper_buka
Lcall SetPosisiServo ;
Mov DPTR,#servo_tiga
Lcall SetPosisiServo ;
Lcall SetPosisiServo ;
Mov DPTR,#servo_tiga
Lcall SetPosisiServo ;
Lcall Delay_1detik
Mov DPTR,#servo_gripper_buka
Lcall SetPosisiServo
lcall Delay_1detik
Mov DPTR,#servo_tiga_balik
Lcall SetPosisiServo ;
Mov DPTR,#servo_dua_balik
Lcall SetPosisiServo ;
Lcall Delay_1detik
ljmp main
BAB VI
PENUTUP
6.1 Kesimpulan
Setelah melalui proses pengerjaan Tugas Akhir pembuatan Robot Lengan Pemilah Benda dengan menggunakan Mikrokontroller MCS-51 dan dilengkapi dengan Sensor Ultrasonik modul Dsonar ini dari awal hingga akhir, baik dalam pengerjaan hardware, Software secara umum penulis dapat menyimpulkan beberapa kesimpulan yaitu sebagai berikut :
1. Hasil pembuatan prototype Robot Lengan ini telah selesai.
2. Mikrokontroller AT89s51 mampu menerima inputan dari Sensor Ultrasonik dan Switch yang terpasang yang kemudian diolah dan diproses menjadi suatu output yang selanjutnya diterjemahkan oleh Servo Kontrol DSR-08 untuk menggerakkan Motor Servo sehingga robot dapat bergerak sesuai dengan yang diharapkan.
3. Gerak robot hanya pada ruang lingkup area kerja robot.
5. Beberapa gangguan pada gerak Robot Lengan ini terutama disebabkan oleh beban objek yang akan dipindahkan terlalu berat dari jangkauan kekuatan Motor Servo, sehingga Motor Servo tidak dapat bekerja dengan maksimal dan terkadang tidak mau bergerak sama sekali.
6. Konsep kerja berdasarkan pengaturan oleh sebuah program.
6.2 Saran
Dari hasil pengerjaan Tugas Akhir pembuatan Robot Lengan ini penulis memberikan saran untuk pengembangan system yang telah dirancang yaitu sebagai berikut :
1. Untuk menjaga keseimbangan system bekerja dengan baik, maka diperlukan Motor Servo yang bisa mengangkat beban yang lebih berat.
2. Mengganti kerangka mekanik dengan menggunakan bahan yang lebih baik dari yang penulis buat agar Robot Lengan yang dibuat lebih kuat dan kokoh. Seperti Plat aluminium, besi, dsb.
4. Pengembangan pendeteksi ukuran benda lebih dari dua ukuran benda yaitu besar, sedang dan kecil. Atau dibuat bisa mendeteksi ukuran sesuai dengan penghitungan ukuran benda dari robot.
5. Pengembangan menggunakan LCD, sehingga memudahkan untuk mengetahui jarak benda yang akan dipilah.
Budiharto, Widodo. 2009. Robotika, Teori dan Implementasi. Yogyakarta : Andi Offset.
Budiharto, Widodo. 2006. Membuat Robot Cerdas. Jakarta : Elex Media Komputindo.
Budiharto, Widodo. 2009. Membuat Sendiri Robot Humanoid. Jakarta : Elex Media Komputindo.
Budiharto, Widodo. 2004. Interfacing Komputer dan Mikrokontroller. Jakarta : Elex Media Komputindo.
Pitowarno, Endra. 2006. Desain Kontrol dan Kecerdasan Buatan. Yogyakarta : Andi Offset.
Setiawan, Sulhan. 2006. Mudah dan Menyenangkan Belajar Mikrokontroller. Yogyakarta : AndiOffset.
Eko, Agfianto. 2005. Pengendalian Mobile Robot dengan MOBOTSIM v1.0. Yogyakarta : Gava Media.
Malik, Ibnu. 2006. Pengantar Membuat Robot. Yogyakarta : Gava Media.
Henry. 2002. Crust Crawler Robotic, (Online), (http://www.crustcrawler.com/motors/servos/index.php, diakses 4 Maret 2010).