Ir. Heriyanto, M.T. Ir. Heriyanto, M.T.
1.
1. TUJUANTUJUAN
Praktikum ini memberi kompetensi dasar pada mahasiswa yaitu kemampuan untuk dapat Praktikum ini memberi kompetensi dasar pada mahasiswa yaitu kemampuan untuk dapat mengendalikan sistem aliran. Adapun tujuan praktikum:
mengendalikan sistem aliran. Adapun tujuan praktikum: 1)
1) menentukan kurva karakterisitik statik pada beban berbeda;menentukan kurva karakterisitik statik pada beban berbeda; 2)
2) melakukan identifikasi sistem untuk menentukan parameter model proses;melakukan identifikasi sistem untuk menentukan parameter model proses; 3)
3) mempelajari pengaruh nilai parameter pengendali pada respons levelmempelajari pengaruh nilai parameter pengendali pada respons level
2.
2. LANDASAN TEORILANDASAN TEORI 2.1
2.1 Karakteristik StatikKarakteristik Statik
Karakteristik statik sistem proses adalah perilaku sistem yang tidak bergantung waktu. Karakteristik statik sistem proses adalah perilaku sistem yang tidak bergantung waktu. Dengan kata lain menunjukkan hubungan
Dengan kata lain menunjukkan hubungan steay-state steay-state antara variabel proses dan sinyal antara variabel proses dan sinyal kendali. Karakteristik statik lebih baik digambarkan dalam bentuk kurva hubungan antara kendali. Karakteristik statik lebih baik digambarkan dalam bentuk kurva hubungan antara vaiabel proses dan sinyal kendali. Dari situ dapat dilihat pada sinyal kendali berapa untuk vaiabel proses dan sinyal kendali. Dari situ dapat dilihat pada sinyal kendali berapa untuk menghasilkan nilai variabel proses tertentu. Dengan karakterisitk statik dapat diperoleh menghasilkan nilai variabel proses tertentu. Dengan karakterisitk statik dapat diperoleh informasi:
informasi:
linieritas sistem;linieritas sistem;
jenis aksi sistem proses ( jenis aksi sistem proses (directdirect atauatau reverse acting reverse acting ););
steady state gain steady state gain (K (K p p););
pengaruh beban pada kebu pengaruh beban pada kebutuhan besartuhan besar manipulated variablemanipulated variable;;
batas pengendalian yang dapat dilakukan batas pengendalian yang dapat dilakukan ((controllabilitycontrollability).).
2.2
2.2 Identifikasi Sistem ProsesIdentifikasi Sistem Proses
Identifikasi sistem proses dilakukan untuk mengetahui parameter model proses. Metode Identifikasi sistem proses dilakukan untuk mengetahui parameter model proses. Metode sederhana dapat dilakukan dengan uji kurva reaksi. Uji dilakukan dengan mengubah nilai sederhana dapat dilakukan dengan uji kurva reaksi. Uji dilakukan dengan mengubah nilai sinyal kendali pada titik kerja/operasi ke nilai baru, misalnya dari 60% ke 70%. Dari uji sinyal kendali pada titik kerja/operasi ke nilai baru, misalnya dari 60% ke 70%. Dari uji kurva reaksi dapat diperoleh model FOPDT (
kurva reaksi dapat diperoleh model FOPDT ( first order plus dead ti first order plus dead timeme) yang memiliki tiga) yang memiliki tiga parameter:
parameter:
Steady-state gainSteady-state gain (K (K p p), yang menentukan sensitivitas respons.), yang menentukan sensitivitas respons.
Time constantTime constant (τ(τ p p), yang menentukan kecepatan respons.), yang menentukan kecepatan respons.
Dead time Dead time (( p p), yang menentukan besar tundaan re), yang menentukan besar tundaan respons.spons.
2.3
2.3 Pengendalian LevelPengendalian Level
Dalam pengendalian level ini sebagai PV adalah level air, MV adalah level air masuk, SP Dalam pengendalian level ini sebagai PV adalah level air, MV adalah level air masuk, SP adalah level yang diinginkan, gangguan adalah level air keluar. Sebagai sensor level adalah adalah level yang diinginkan, gangguan adalah level air keluar. Sebagai sensor level adalah jenis
sistem cenderung tidak stabil. Pada pengendali proporsional saja ( P-control )
dengan memperbesar K c maka offset lebih kecil.
Waktu integral (τi): integral menghilangkan offset , menambah tundaan
(pergeseran fase), dan membuat sistem cenderung tak stabil (overshoot dan decay ratio semakin besar). Semakin kecil waktu integral, respons semakin cepat, tetapi semakin tak stabil.
Waktu derivatif (τd): derivatif tidak menghilangkan offset , mempercepat respons,
membuat sistem lebih stabilan (overshoot dan decay ratio semakin kecil) tetapi sistem menjadi peka terhadap gangguan cepat (noise). Semakin besar waktu derivatif respons semakin cepat.
3. PERALATAN PERCOBAAN
Susunana peralatan percobaan adalah sebagai berikut
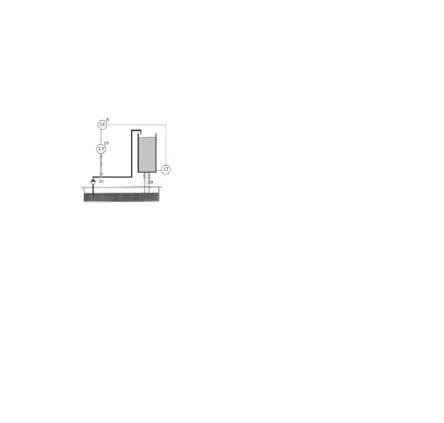
Gambar 2. Susunan peralatan. Keterangan Gambar 2:
(1) Bak berisi air (2) Pompa
(3) Control valve (4) I/P Transducer (5) Udara instrumen (6) Manometer
(7) Regulator tekanan udara
(8) Pengendali luar (9) Panel kendali
(10) Komputer
(11) Tangki Penampung
(12) Katup buang manual
(13) Sensor dan transmiter level
(14) Katup solenoida
3. PROSEDUR PERCOBAAN 3.1 Persiapan
1) Pastikan penampung air telah terisi paling sedikit tiga perempat penuh. 2) Sistem peralatan level telah terhubung secara benar dengan komputer. 3) Pastikan komputer bekerja normal.
3.2 Pengoperasian Perangkat Keras
1) Pastikan udara instrumen telah mengalir pada tekanan masuk 140 kPa (1,4 bar) atau maksimum 200 kPa (2 bar). Jika perlu atur regulator tekanan udara instrumen agar memenuhi tekanan tersebut.
2) Nyalakan peralatan CRL dengan menekan tombol daya
3) Ubah saklar pemilih ke posisi PC. Pompa akan hidup dan mengalirkan air ke dalam tangki
3.1 Pengoperasian Perangkat Lunak
1) Nyalakan komputer/laptop dan jalankan program level control 2) Pastikan posisi tombol AUTO/MANUAL pada posisi MANUAL 3) Pastikan posisi tombol REVERSE/DIRECT pada posisi REVERSE
solenoida tertutup (off ).
2) Atur manipulated variable yang merepresentasikan bukaan katup kendali dengan menggeser horizontal scroll ke 0%. Tunggu ampai penunjukan tekanan nol.
3) Perbesar manipulated variable ke 10%. Tunggu sampai penunjukkan tekanan konstan.
4) Teruskan memperbesar MV ke 20%, 30%, 40%, 50% dan seterusnya hingga 100%. Catat nilai MV dan tekanan yang diperoleh.
5) Ulangi langkah (2-4) dengan menambah beban proses yaitu membuka katup solenoida.
3.3 Identifikasi Sistem Proses dan Penetuan Parameter Pengendali
1) Pastikan posisi tombol AUTO/MANUAL pada posisi MANUAL dan katup solenoida tertutup.
2) Tekan tombol START agar proses berjalan.
3) Atur manipulated variable (MV) hingga PV (level) 50%
4) Dengan cepat tambahkan nilai MV 10%. Misalnya kalau semula 40% ubah menjadi 50%. Perhatikan perubahan PV yang dihasilkan.
5) Jika sudah konstan, hentikan dengan menekan tombol STOP maka data pengamatan akan masuk ke EXCEL. Simpan dengan data yang diperoleh.
6) Ulangi langkah (2-5) dengan beban proses berbeda yaitu dengan membuka katup solenoida. Setelah selesai tutup kembali katup solenoida.
Dari kurva yang dihasilkan tentukan parameter proses konstanta waktu proses (τ p
), steady- state gain (K p) dan waktu mati ( p). Selanjutnya dari parameter proses yang diperoleh
tentukan parameter pengendali seperti gain proporsional (atau proportional band ), waktu integral dan derivatif menurut Zigler-Nichols untuk pengendali P, PI, dan PID.
3.4 Pengendali Proporsional (P)
1) Masukkan nilai K c atau PB dari hasil di butir (3.5) dan pastikan SP pada 50 %,
2) Ubah waktu integral (Ti) ke nilai yang sangat besar (misal 100000) dan waktu
derivatif ke nol..
3) Geser vertical scroll SP ( setpoint ) ke posisi 50 % atau dengan cara mengetikkan nilai 50 kemudian tekan ENTER.
4) Ubah posisi tombol AUTO/MANUAL ke posisi AUTO
5) Tekan tombol START, dan amati indikator MV, PV dan SP. Bila PV sudah stabil atau di sekitar SP lanjutkan ke langkah (6).
6) Ubah setpoint (SP) ke 70 % dengan mengetikkan angka 70 dan diikuti menekan ENTER.
7) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai tekanan (PV).
8) Ubah setpoint (SP) kembali ke 50 %, dan tunggu sampai nilai PV stabil dan konstan.
9) Tekan timbol STOP maka data pengamatan akan masuk ke EXCEL. Simpan dengan data yang diperoleh.
10) Tambah gain K c dua kalinya (misal: semuala 2 menjadi 4) atau atau perkecil PB
sebesar setengahnya (misal: semula 50% menjadi 25%). Ulangi langkah (5-9).
11) Kurangi gain K c setenganya (misal: semuala 2 menjadi 1) atau atau perbesar PB
sebesar dua kalinya (misal: semula 50% menjadi 100%). Ulangi langkah (5-9). 3.5 Pengendali Proporsional-Integral (PI)
1) Masukkan nilai K c atau PB dan τi dari hasil di butir (3.5) dan pastikan SP pada
50 %,
2) Tekan tombol START, dan amati indikator MV, PV dan SP. Bila PV sudah stabil atau di sekitar SP lanjutkan ke langkah (3).
3) Ubah setpoint (SP) ke 70 % dengan mengetikkan angka 70 dan diikuti menekan ENTER.
4) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai tekanan (PV).
5) Ubah setpoint (SP) kembali ke 50 %, dan tunggu sampai nilai PV stabil dan konstan.
6) Tekan timbol STOP maka data pengamatan akan masuk ke EXCEL. Simpan dengan data yang diperoleh.
7) Ulangi langkah (2-6) dengan matriks variasi sebagai berikut.
Pengendali PI PROPORSIONAL
2 PB PB 0,5 PB
INTEGRAL
0,5 τi Run 11 Run 12 Run 13
τi Run 21 Run 22 Run 23
2 τi Run 31 Run 32 Run 33
Catatan: K c dan τi adalah nilai yang diperoleh dari butir (3.5), PB = 100/K c
3.6 Pengendali Proporsional-Integral-Derivatif (PID)
1) Masukkan nilai K c atau PB, τi, dan τd dari hasil di butir (3.5) dan pastikan SP
pada 50 %,
2) Tekan tombol START, dan amati indikator MV, PV dan SP. Bila PV sudah stabil atau di sekitar SP lanjutkan ke langkah (3).
3) Ubah setpoint (SP) ke 70 % dengan mengetikkan angka 70 dan diikuti menekan ENTER.
4) Amati nilai tekanan (PV), apakah bisa mengikuti SP. Perhatikan juga adakah osilasi nilai tekanan (PV).
5) Ubah setpoint (SP) kembali ke 50 %, dan tunggu sampai nilai PV stabil dan konstan.
6) Tekan timbol STOP maka data pengamatan akan masuk ke EXCEL. Simpan dengan data yang diperoleh.
2 τi Run 91 Run 92 Run 93
Catatan: K c, τi, dan τd adalah nilai yang diperoleh dari butir (3.5), PB = 100/K c
3.7 Penyelesaian
1) Matikan peralatan seluruhnya dari sumber listrik. 2) Buka katup buang tangki sehingga kosong.
3) Bersihkan tempat kerja sehingga tidak ada sampah, kertas atau barang lain berserakan di sekitar peralatan.
4. KESELAMATAN KERJA
Potensi bahaya yang perlu diwaspadai.
Hati-hati dengan listrik bolak-balik 220 V dari PLN
Pada saat bekerja, di sekitar meja tidak terdapat pemasangan listrik yang
berbahaya.
Selidiki dengan test-pen atau peralatan lain, apakah semua peralatan telah
ditanahkan dengan baik. Hal ini untuk menghindari sengatan listrik akibat efek kapasitif atau induktif.
Berhati-hatilah dengan perhiasan logam, seperti cincin, jam tangan, mistar logam,
dan lain-lain alat yang mampu membuat hubung singkat.
Usahakan agar tidak seorangpun dapat tersandung oleh kawat-kawat atau tidak
sengaja merobohkan peralatan.
Bila menghubungkan peralatan, maka hubungan dengan jaringan listrik dilakukan
paling akhir.
Jika terjadi sengatan listrik dan korban terbelit kawat, jangan panik! Cepat putuskan
sambungan listrik, baru menolong korban.
5. CARA PENGOLAHAN DATA
Data pengamatan yang diperoleh adalah tabel data selama percobaan yang tersimpan dalam format EXCEL. Dari percobaan ini beri penjelasan mengenai respons variabel proses. Berikut yang perlu diperhatikan:
2) Tentukan parameter model proses
3) Buat peta penalaan (tuning map) untuk pengendali P, PI, dan PID. Peta penalaan adalah peta yang menggambarkan grafik respons untuk setiap pasangan parameter pengendali.
5 DAFTAR PUSTAKA
(1) Heriyanto (2010). Pengendalian Proses. Jurusan Teknik Kimia, Bandung: POLBAN
(2) Cooper, D.J. (2004). Practical Procxess Control . Control Station.
(3) Wade, H. L. (2004). Basic and Adavanced Regulatory Control: System Design and Application. Ed. 2, ISA, NC.