Abstrak— Sebuah Flying Wing Unmanned Aerial
Vehicle adalah pesawat yang dikendalikan oleh pilot atau navigator (kini disebut Combat System Officer) namun tanpa adanya awak didalam pesawat tersebut. Aplikasi dari UAV hingga kini adalah untuk keperluan militer. Sebagai pembeda antara UAV dengan misil, UAV didefinisikan sebagai kendaraan udara yang tidak membawa awak didalamnya, bisa untuk sekali pakai atau digunakan berulangkali.Studi ini di lakukan dengan metode numerik, dimana menggunakan software Fluent dengan model turbulent k-efsilon transport (SST), dimana dengan program fluent dapat diketahui center of pressure (CP) dari airfoil yang dipengaruhi penambahan Ardupilot+IMU dengan sudut yang telah ditentukan. Setelah mengetahui CP maka mencari sudut flap pada airfoil.Dari analisa aerodinamis UAV ini didapatkan nilai melalui analisis FLUENT, selisih jarak antara CG dengan CP pada airfoil 0o dengan 3o adalah. -0.53 cm, sedangkan pada pada perbandingan 0o dengan 5o adalah 0 cm, dan pada perbandingan 0o dengan 10o adalah 0.01 cm. Dari grafik coefficient of lift dan coefficient of drag vs angle of attack didapatkan besar coefficient of lift pada angle of attack 0o sama dengan angle of attack 5o terdapat pada posisi flap 15o.
Kata kunci — UAV, IMU, Ardupilot, center of pressure, flap, angle of attack.
I. PENDAHULUAN
Sebuah Unmanned Aerial Vehicle (UAV; juga diketahui sebagai remotely piloted vehicle atau RPV, juga Unmanned Aircraft System (UAS)) adalah sebuah pesawat
yang dikendalikan oleh pilot atau navigator (kini disebut
Combat System Officer) namun tanpa adanya awak didalam
pesawat tersebut. Aplikasi dari AUV hingga kini adalah untuk keperluan militer. Sebagai pembeda antara AUV dengan misil, AUV didefinisikan sebagai kendaraan udara yang tidak membawa awak didalamnya, memanfaatkan gaya aerodinamis sebagai gaya pengangkat, dapat terbang tanpa perlu dikendalikan maupun dikendalikan dari jauh, bisa untuk sekali pakai atau digunakan berulangkali dan dapat digunakan untuk membawa beban yang berbahaya maupun tidak
A. Teori Pengaruh Angle of Attack terhadap Center of Pressure
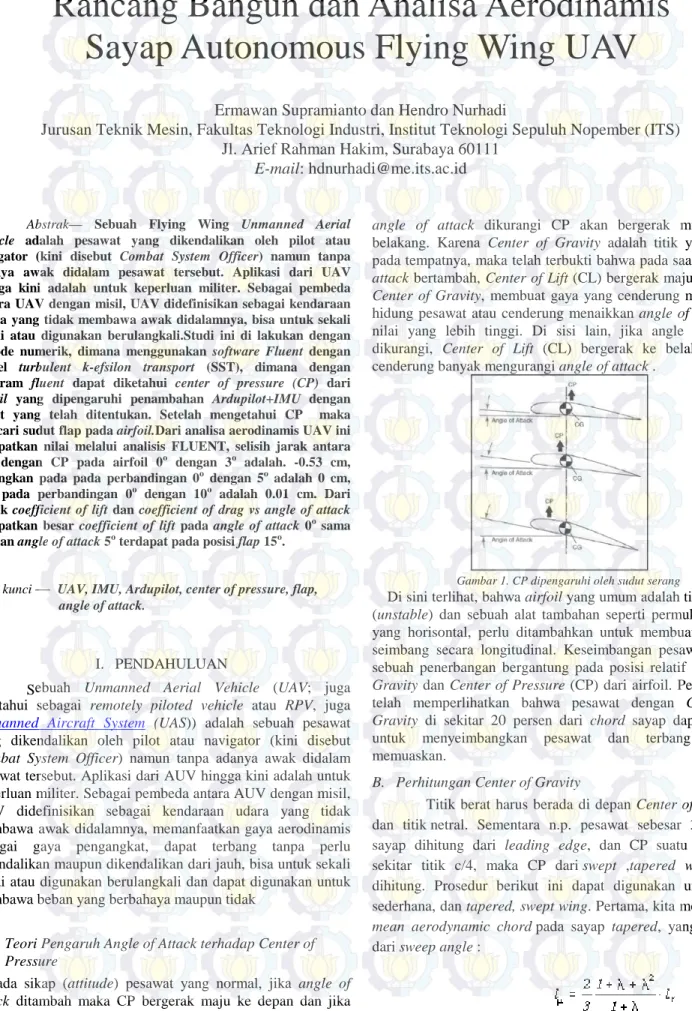
Pada sikap (attitude) pesawat yang normal, jika angle of
attack ditambah maka CP bergerak maju ke depan dan jika
angle of attack dikurangi CP akan bergerak mundur ke
belakang. Karena Center of Gravity adalah titik yang tetap pada tempatnya, maka telah terbukti bahwa pada saat angle of
attack bertambah, Center of Lift (CL) bergerak maju di depan Center of Gravity, membuat gaya yang cenderung menaikkan
hidung pesawat atau cenderung menaikkan angle of attack ke nilai yang lebih tinggi. Di sisi lain, jika angle of attack dikurangi, Center of Lift (CL) bergerak ke belakang dan cenderung banyak mengurangi angle of attack .
Gambar 1. CP dipengaruhi oleh sudut serang
Di sini terlihat, bahwa airfoil yang umum adalah tidak stabil (unstable) dan sebuah alat tambahan seperti permukaan ekor yang horisontal, perlu ditambahkan untuk membuat pesawat seimbang secara longitudinal. Keseimbangan pesawat dalam sebuah penerbangan bergantung pada posisi relatif Center of
Gravity dan Center of Pressure (CP) dari airfoil. Pengalaman
telah memperlihatkan bahwa pesawat dengan Center of
Gravity di sekitar 20 persen dari chord sayap dapat dibuat
untuk menyeimbangkan pesawat dan terbang dengan memuaskan.
B. Perhitungan Center of Gravity
Titik berat harus berada di depan Center of pressure dan titik netral. Sementara n.p. pesawat sebesar 35% dari sayap dihitung dari leading edge, dan CP suatu sayap di sekitar titik c/4, maka CP dari swept ,tapered wing harus dihitung. Prosedur berikut ini dapat digunakan untuk yang sederhana, dan tapered, swept wing. Pertama, kita menghitung
mean aerodynamic chord pada sayap tapered, yang terlepas
dari sweep angle :
(1)
Rancang Bangun dan Analisa Aerodinamis
Sayap Autonomous Flying Wing UAV
Ermawan Supramianto dan Hendro Nurhadi
Jurusan Teknik Mesin, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
Pesawat flying wing yang dirancang memiliki chord length at
root lr, chord length at tip lt, serta wing span b. dengan taper ratio :
Lokasi dari koordinat x,y dari CP atau 4/c x adalah :
. (2)
Gambar 2. Geometric parameters of a tapered, swept wing.
Selain menggunakan pendekatan grafis, lokasi titik netral juga dapat dihitung dengan menggunakan salah satu rumus berikut, tergantung pada taper ratio:
, jika taper ratio > 0,375 (3)
, jika taper ratio <0,375. (4)
Sumber : www.MH-aerotools.de/
C. Komponen UAV Flying Wing
1. Inertial Measurement Unit
Unit pengukur inersia (Inertial Measurement Unit/IMU) adalah peralatan elektronik yang mengukur dan melaporkan kecepatan, orientasi dan gaya gravitasi dari sebuah wahana. Menggunakan kombinasi satu/lebih accelerometer dan giroskop.
2. Kompas Digital (Magnometer)
Untuk sensor elektronik, dapat digunakan jarum magnet yang direkatkan pada poros sebuah servo-generator, namun jenis sensor mekanis ini jarang digunakan sekarang, yang digunakan adalah sensor Hall-effect. Hall-effect adalah contoh dari pergerakan akibat efek magnetik pada moving charged
particles, yaitu elektron atau hole, dan pergerakan hole pada
logam dan semikonduktor adalah cara pendeteksiannya. 3. Global Positioning System (GPS)
Adalah navigasi berbasis sistem satelit yang menyediakan informasi lokasi dan waktu. Navigasi GPS terbentuk dari garis pandang empat satelit atau lebih.
4. Barometer
Tekanan dalam cairan atau gas didefinisikan sebagai gaya yang bekerja per satuan luas. Satuan yang sama dengan
mechanical stress, dan untuk benda padat, besar gaya/luasan
selalu diistilahkan sebagai tegangan (stress) dibandingkan tekanan.
5. Modul Ardupilot Mega
Ardupilot Mega adalah produk yang dikembangkan oleh Chris Anderson dan Jordi Munoz dari DIY Drones. Modul ini berbasis open-source paling berkembang untuk autopilot. Baik autopilot untuk pesawat (ArduPlane), Multicopter (ArduCopter) dan kendaraan darat (ArduRover).
6. Motor DC Brushless
Motor DC brushless adalah motor yang dialiri arus searah (Direct Current/DC) dan memiliki sistem komutator elektronik, tidak menggunakan komutator mekanik dan sikat (brushes). Hubungan arus-torsi dan frekuensi-kecepatan dari motor DC brushless adalah linier.
7. Electronic Speed Control (ESC)
Kendali kecepatan elektronik (Electronic speed
control/ESC) adalah sebuah sirkuit elektronik dengan tujuan
untuk memvariasi kecepatan motor listrik, arahnya dan bisa berfungsi sebagai rem dinamis.
8. Motor Servo
Motor servo atau lebih singkat di sebut Servo adalah Sebuah alat yang terdiri dari Motor DC, Gear Box dan Driver control yang terpadu menjadi satu.
9. Kendali Jarak Jauh (Remote Control)
Merupakan sistem pengendalian jarak jauh dengan gelombang radio berfrekuensi 2,4 GigaHertz.
II. METODOLOGI PENELITIAN
1. Melakukan studi literatur berdasarkan jurnal ilmiah, buku teks serta penelitian sebelumnya dalam bentuk tugas akhir. 2. Membuat model Flying Wing (UAV)
3. Merancang Autonomous Flying Wing secara detail menggunakan softwere AUTOCAD
4. Menghitung berat dan titik berat Flying Wing sebelum diberi komponen ARDUPILOT menggunakan software AUTOCAD
5. Memodelkan, mensimulasikan serta mendapatkan profil aliran di sekitar dinding airfoil dengan menggunakan software FLUENT sehingga didapat nilai static pressure pada daerah laju aliran disekitar dinding airfoil
6. Membuat rangkaian elektronik untuk pergerakan secara Autonomous menggunakan sensor IMU, Kompas, dan GPS module.
7. Menguji coba kemampuan baca sensor.
8. Menghitung berat dan titik berat Flying Wing setelah diberi komponen elektronik menggunakan software AUTOCAD 9. Mengubah sudut kendali sayap 3o, 5o, 10o
10. Memodelkan, mensimulasikan serta mendapatkan profil aliran di sekitar dinding airfoil dengan menggunakan software FLUENT sehingga didapat nilai static pressure pada daerah laju aliran disekitar dinding airfoil
11. Melakukan uji coba Autonomous Flying Wing di udara 12. Mengambil kesimpulan berdasarkan hasil penelitian yang
telah dilakukan
D. Dimensi Flying Wing
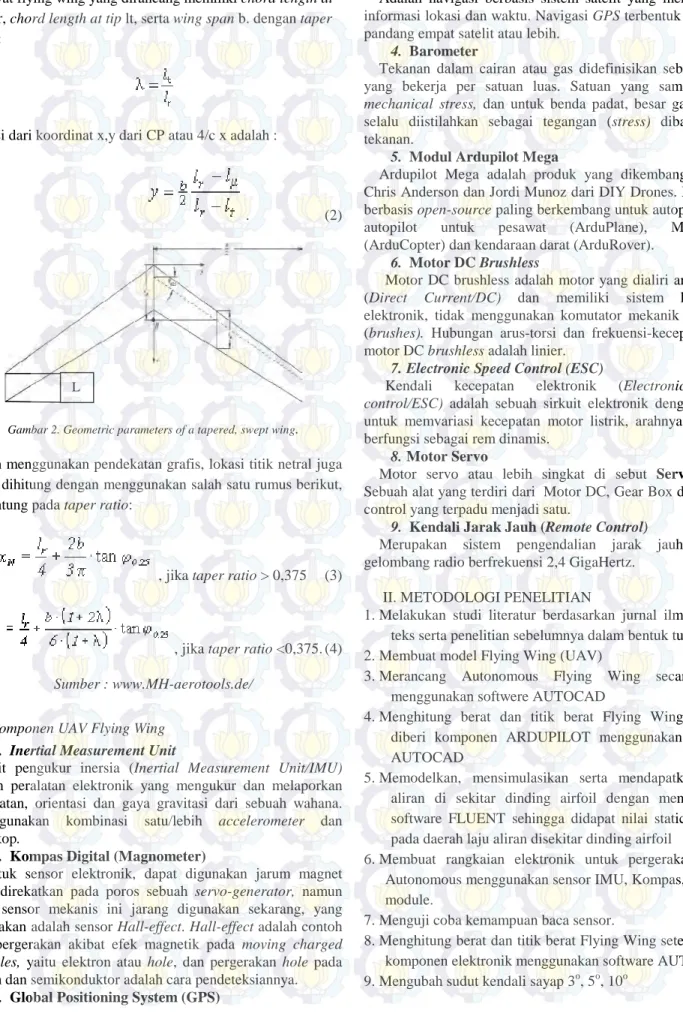
Gambar 3 Dimensi flying wing menggunakan softwere autocad dalam satuan cm
E. Block Diagram Desain Minimum Sistem pada Flying Wing User Transmitter remote control KENDALI TERBANG ARDUPILOT Kendali manual COMPAS IMU GPS BAROMETER Receiver remote control ESC 1 motor Baterai
Korelasi 1 arah nirkabel korelasi 2 arah nirkabel
korelasi 1 arah korelasi 2 arah
2 servo
Gambar 4. Block Diagram Desain Minimum sistem pada Flying wing
III.HASILDANDISKUSI
F. Hasil Penempatan Center of Gravity Pemodelan Flying Wing pada Autocad
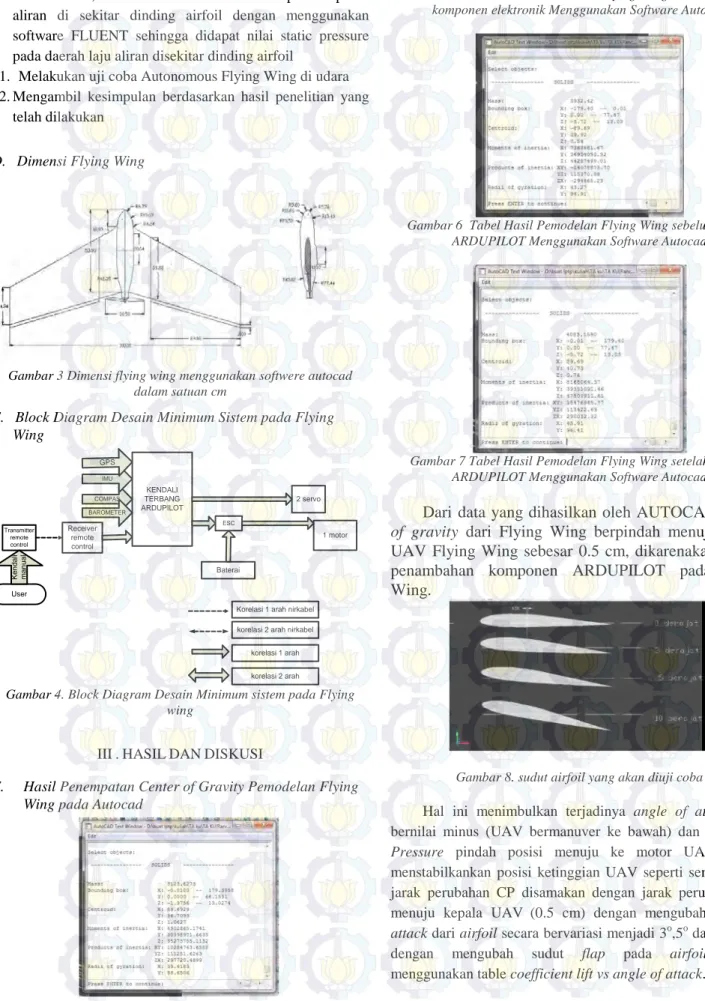
Gambar 5 Tabel Hasil Pemodelan Flying Wing sebelum diberi komponen elektronik Menggunakan Software Autocad
Gambar 6 Tabel Hasil Pemodelan Flying Wing sebelum diberi ARDUPILOT Menggunakan Software Autocad
Gambar 7 Tabel Hasil Pemodelan Flying Wing setelah diberi ARDUPILOT Menggunakan Software Autocad
Dari data yang dihasilkan oleh AUTOCAD, center
of gravity dari Flying Wing berpindah menuju kepala
UAV Flying Wing sebesar 0.5 cm, dikarenakan adanya
penambahan komponen ARDUPILOT pada Flying
Wing.
Gambar 8. sudut airfoil yang akan diuji coba
Hal ini menimbulkan terjadinya angle of attack yang bernilai minus (UAV bermanuver ke bawah) dan Center Of
Pressure pindah posisi menuju ke motor UAV. Untuk
menstabilkankan posisi ketinggian UAV seperti semula maka jarak perubahan CP disamakan dengan jarak perubahan CG menuju kepala UAV (0.5 cm) dengan mengubah angle of
attack dari airfoil secara bervariasi menjadi 3o,5o dan 10o juga dengan mengubah sudut flap pada airfoil dengan menggunakan table coefficient lift vs angle of attack.
Dengan software FLUENT dapat diketahui profil center
of pressure dari ketiga airfoil. Profil penempatan center of pressure dapat diketahui dengan menentukan titik pressure
terrendah dimana yang telah diterangkan pada bab II letak pusat tekanan (center of pressure) berada pada tekanan yang bernilai negative atau terendah. http://www.scribd.com
G. Perhitungan Berat dan Titik Berat Pemodelan UAV Flying Wing
• Berat dan Titik Berat UAV Flying Wing Tanpa
Ardupilot MEGA
Pada kondisi ini badan UAV Flying wing hanya terdapat komponen IMU, ardupilot mega, ESC, motor, receiver dan servo.
Gambar 9 penempatan posisi komponen sebelum diberi
ARDUPILOT
Tabel.1 Titik berat Flying Wing sebelum diberi ARDUPILOT
nomor nama berat (W) (kg) X (m) Y (m) W*X W*Y
1 permukaan badan UAV 3.123 0 0.367 0 1.146141
2 baterai 0.512 0 0.66 0 0.33792 3 TX/RX 0.0078 0 0.52 0 0.004056 4 servo kanan 0.076 0.168 0.37 0.012768 0.02812 5 servo kiri 0.076 -0.168 0.37 -0.012768 0.02812 6 motor 0.186 0 0.2 0 0.0372 7 ESC 0.084 0 0.38 0 0.03192 4.0648 0 1.613477 Xi = ƩW*X / ƩW Yi = ƩW*Y / ƩW Xi = 0 /4. 0648 Xi = 0 Yi = 0.396938841 Yi = 1.613477 / 4.0648
Dari perhitungan diatas diperoleh Berat total dan titik berat dari UAV Flying Wing sebelum diberi komponen Ardupilot MEGA(+IMU). Titik Berat arah bidang Y di hiting mulai belakang buritan sehingga kalau di hitung berdasarkan titik tengah pada body UAV Flying Wing adalah
Xi = 0 m Yi = 0.3969 m
Perbandingan data posisi titik berat yang diperoleh dari Autocad text window dengan perhitungan manual adalah : Autocad text window XiAb = 0 (dari posisi XY tengah bawah badan UAV)
YiAb = 0.3992 m Perhitungan manual Xib = 0
Yib = 0.3969 m
• Berat dan Titik Berat UAV Flying Wing Dengan
Ardupilot MEGA
Gambar 10 penempatan posisi komponen setelah diberi
ARDUPILOT
Tabel 2 Titik berat Flying Wing setelah diberi ARDUPILOT
nomor nama berat (W) (kg) X (m) Y (m) W*X W*Y
1 permukaan badan UAV 3.123 0 0.367 0 1.146141
2 baterai 0.512 0 0.66 0 0.33792 3 TX/RX 0.0078 0 0.52 0 0.004056 4 servo kanan 0.076 0.168 0.37 0.012768 0.02812 5 servo kiri 0.076 -0.168 0.37 -0.012768 0.02812 6 motor 0.186 0 0.2 0 0.0372 7 ESC 0.084 0 0.38 0 0.03192 8 Ardupilot MEGA+IMU 0.15 0 0.539 0 0.08085 4.2148 0 1.694327 Xi = ƩW*X / ƩW Yi = ƩW*Y / ƩW Xi = 0 /4. 0648 Xi = 0 Yi = 0.401994638 Yi = 1.613477 / 4.0648
Jarak perpindahan titik berat menurut data Autocad text window pada UAV Flying Wing antara sebelum dan setelah diberi komponen Ardupilot MEGA adalah YiAa - YiAb = 0.4073 m - 0.3992 m = 0.0081 m.
Dan jarak perpindahan titik berat menurut perhitungan manual pada UAV Flying Wing antara sebelum dan setelah diberi komponen Ardupilot MEGA adalah Yia - Yib = 0.4019 m - 0.3969 m = 0.005502737 m.
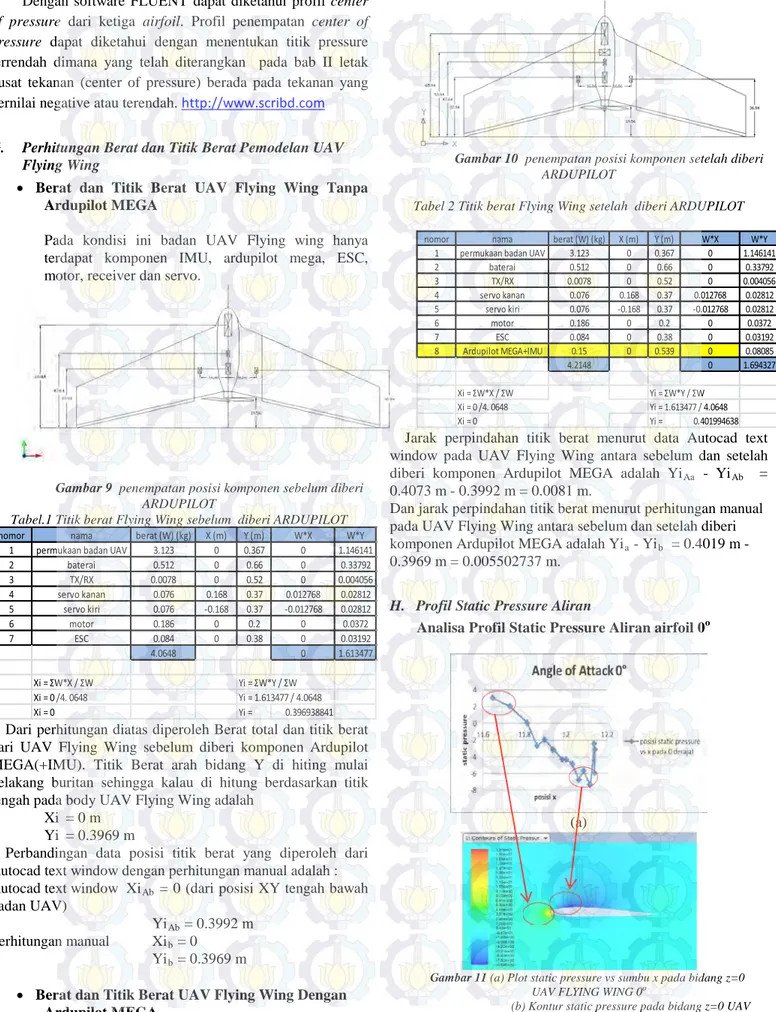
H. Profil Static Pressure Aliran
Analisa Profil Static Pressure Aliran airfoil 0o
(a)
Gambar 11 (a) Plot static pressure vs sumbu x pada bidang z=0
UAV FLYING WING 0o
(b) Kontur static pressure pada bidang z=0 UAV FLYING WING 0o
Tabel 3. Nilai static pressure disepanajang dinding airfoil 0o pada bidang Z=0
(x)cm (y) cm (pressure) bar
11.62826 -2.61448 -2.0508065 11.64734 -2.60907 3.0176845 11.69735 -2.61661 -2.2014604 11.73067 -2.59823 2.0493207 11.78304 -2.61973 -2.4413588 11.814 -2.5874 0.066024527 11.86144 -2.62172 -2.6865129 11.89825 -2.57724 -1.953231 11.93985 -2.62371 -3.1697719 11.98366 -2.57109 -4.3038673 12.00181 -2.62402 -4.3041134 12.03123 -2.62336 -4.8450065 12.0632 -2.5734 -6.7439656 12.08617 -2.61682 -5.6830044 12.11779 -2.58369 -7.3528414 12.13706 -2.59123 -2.4495645 12.13911 -2.6051 -5.9375844 12.14112 -2.59607 -3.1462195
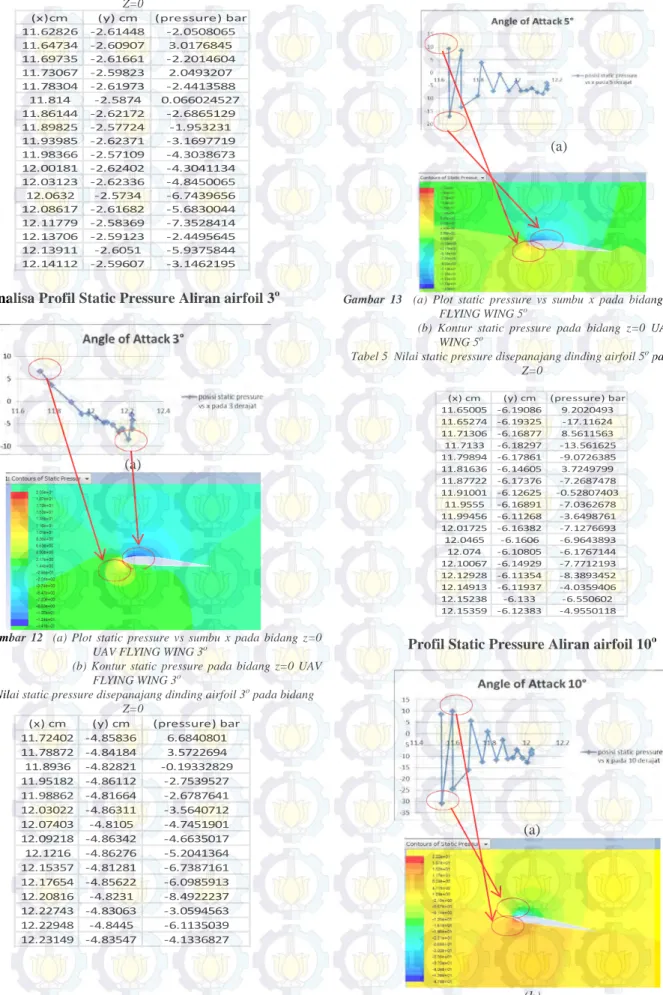
Analisa Profil Static Pressure Aliran airfoil 3o
(a)
Gambar 12 (a) Plot static pressure vs sumbu x pada bidang z=0
UAV FLYING WING 3o
(b) Kontur static pressure pada bidang z=0 UAV FLYING WING 3o
Tabel 4 Nilai static pressure disepanajang dinding airfoil 3o pada bidang Z=0
(x) cm (y) cm (pressure) bar
11.72402 -4.85836 6.6840801 11.78872 -4.84184 3.5722694 11.8936 -4.82821 -0.19332829 11.95182 -4.86112 -2.7539527 11.98862 -4.81664 -2.6787641 12.03022 -4.86311 -3.5640712 12.07403 -4.8105 -4.7451901 12.09218 -4.86342 -4.6635017 12.1216 -4.86276 -5.2041364 12.15357 -4.81281 -6.7387161 12.17654 -4.85622 -6.0985913 12.20816 -4.8231 -8.4922237 12.22743 -4.83063 -3.0594563 12.22948 -4.8445 -6.1135039 12.23149 -4.83547 -4.1336827
Analisa Profil Static Pressure Aliran airfoil 5o
(a)
Gambar 13 (a) Plot static pressure vs sumbu x pada bidang z=0 UAV
FLYING WING 5o
(b) Kontur static pressure pada bidang z=0 UAV FLYING WING 5o
Tabel 5 Nilai static pressure disepanajang dinding airfoil 5o pada bidang Z=0
(x) cm (y) cm (pressure) bar 11.65005 -6.19086 9.2020493 11.65274 -6.19325 -17.11624 11.71306 -6.16877 8.5611563 11.7133 -6.18297 -13.561625 11.79894 -6.17861 -9.0726385 11.81636 -6.14605 3.7249799 11.87722 -6.17376 -7.2687478 11.91001 -6.12625 -0.52807403 11.9555 -6.16891 -7.0362678 11.99456 -6.11268 -3.6498761 12.01725 -6.16382 -7.1276693 12.0465 -6.1606 -6.9643893 12.074 -6.10805 -6.1767144 12.10067 -6.14929 -7.7712193 12.12928 -6.11354 -8.3893452 12.14913 -6.11937 -4.0359406 12.15238 -6.133 -6.550602 12.15359 -6.12383 -4.9550118
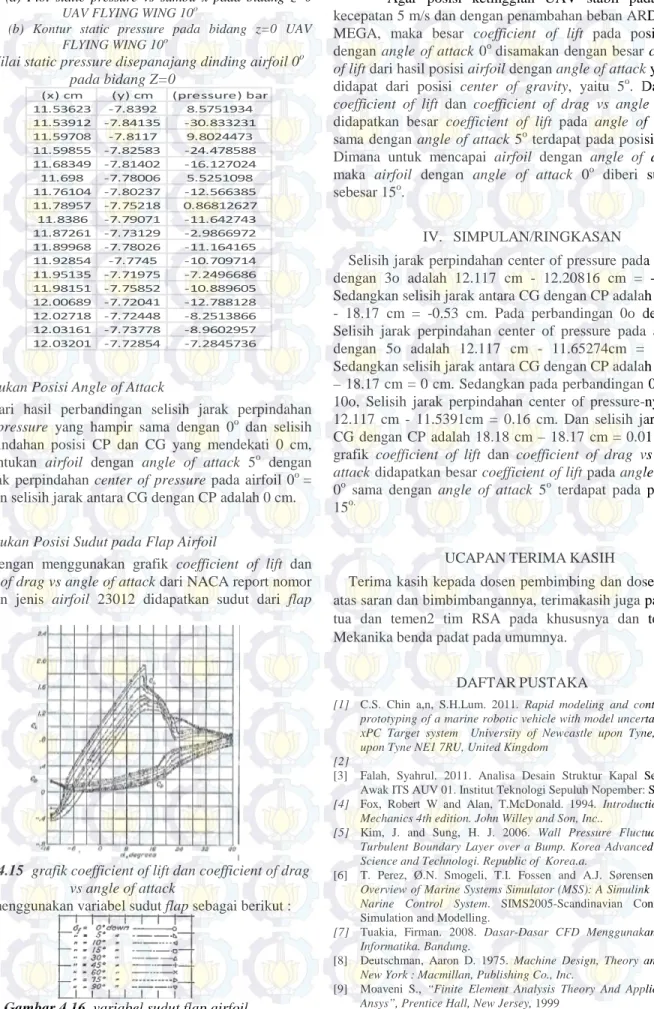
Profil Static Pressure Aliran airfoil 10o
(a)
Gambar 14 (a) Plot static pressure vs sumbu x pada bidang z=0
UAV FLYING WING 10o
(b) Kontur static pressure pada bidang z=0 UAV FLYING WING 10o
Tabel 5 Nilai static pressure disepanajang dinding airfoil 0o pada bidang Z=0
(x) cm (y) cm (pressure) bar
11.53623 -7.8392 8.5751934 11.53912 -7.84135 -30.833231 11.59708 -7.8117 9.8024473 11.59855 -7.82583 -24.478588 11.68349 -7.81402 -16.127024 11.698 -7.78006 5.5251098 11.76104 -7.80237 -12.566385 11.78957 -7.75218 0.86812627 11.8386 -7.79071 -11.642743 11.87261 -7.73129 -2.9866972 11.89968 -7.78026 -11.164165 11.92854 -7.7745 -10.709714 11.95135 -7.71975 -7.2496686 11.98151 -7.75852 -10.889605 12.00689 -7.72041 -12.788128 12.02718 -7.72448 -8.2513866 12.03161 -7.73778 -8.9602957 12.03201 -7.72854 -7.2845736
I. Menentukan Posisi Angle of Attack
Dari hasil perbandingan selisih jarak perpindahan
center of pressure yang hampir sama dengan 0o dan selisih jarak perpindahan posisi CP dan CG yang mendekati 0 cm, maka ditentukan airfoil dengan angle of attack 5o dengan Selisih jarak perpindahan center of pressure pada airfoil 0o = 0.32 cm dan selisih jarak antara CG dengan CP adalah 0 cm.
J. Menentukan Posisi Sudut pada Flap Airfoil
Dengan menggunakan grafik coefficient of lift dan
coefficient of drag vs angle of attack dari NACA report nomor
554 dengan jenis airfoil 23012 didapatkan sudut dari flap
airfoil.
Gambar 4.15 grafik coefficient of lift dan coefficient of drag
vs angle of attack
Dengan menggunakan variabel sudut flap sebagai berikut :
Gambar 4.16 variabel sudut flap airfoil
Agar posisi ketinggian UAV stabil pada kondisi kecepatan 5 m/s dan dengan penambahan beban ARDUPILOT MEGA, maka besar coefficient of lift pada posisi airfoil dengan angle of attack 0o disamakan dengan besar coefficient
of lift dari hasil posisi airfoil dengan angle of attack yang telah
didapat dari posisi center of gravity, yaitu 5o. Dari grafik
coefficient of lift dan coefficient of drag vs angle of attack
didapatkan besar coefficient of lift pada angle of attack 0o sama dengan angle of attack 5o terdapat pada posisi flap 15o. Dimana untuk mencapai airfoil dengan angle of attack 5o, maka airfoil dengan angle of attack 0o diberi sudut flap sebesar 15o.
IV. SIMPULAN/RINGKASAN
Selisih jarak perpindahan center of pressure pada airfoil 0o dengan 3o adalah 12.117 cm - 12.20816 cm = -0.16 cm. Sedangkan selisih jarak antara CG dengan CP adalah 17.64 cm - 18.17 cm = -0.53 cm. Pada perbandingan 0o dengan 5o, Selisih jarak perpindahan center of pressure pada airfoil 0o dengan 5o adalah 12.117 cm - 11.65274cm = 0.32 cm. Sedangkan selisih jarak antara CG dengan CP adalah 18.17 cm – 18.17 cm = 0 cm. Sedangkan pada perbandingan 0o dengan 10o, Selisih jarak perpindahan center of pressure-nya adalah 12.117 cm - 11.5391cm = 0.16 cm. Dan selisih jarak antara CG dengan CP adalah 18.18 cm – 18.17 cm = 0.01 cm. Dari grafik coefficient of lift dan coefficient of drag vs angle of
attack didapatkan besar coefficient of lift pada angle of attack
0o sama dengan angle of attack 5o terdapat pada posisi flap 15o.
UCAPANTERIMAKASIH
Terima kasih kepada dosen pembimbing dan dosen penguji atas saran dan bimbimbangannya, terimakasih juga pada orang tua dan temen2 tim RSA pada khususnya dan temen lab Mekanika benda padat pada umumnya.
DAFTARPUSTAKA
[1] C.S. Chin a,n, S.H.Lum. 2011. Rapid modeling and control systems prototyping of a marine robotic vehicle with model uncertainties using xPC Target system University of Newcastle upon Tyne, Newcastle upon Tyne NE1 7RU, United Kingdom
[2]
[3] Falah, Syahrul. 2011. Analisa Desain Struktur Kapal Selam Tanpa Awak ITS AUV 01. Institut Teknologi Sepuluh Nopember: Surabaya [4] Fox, Robert W and Alan, T.McDonald. 1994. Introduction to Fluid
Mechanics 4th edition. John Willey and Son, Inc..
[5] Kim, J. and Sung, H. J. 2006. Wall Pressure Fluctuations in a Turbulent Boundary Layer over a Bump. Korea Advanced Institute of Science and Technologi. Republic of Korea.a.
[6] T. Perez, Ø.N. Smogeli, T.I. Fossen and A.J. Sørensen. 2005. An Overview of Marine Systems Simulator (MSS): A Simulink Toolbox for Narine Control System. SIMS2005-Scandinavian Conference on Simulation and Modelling.
[7] Tuakia, Firman. 2008. Dasar-Dasar CFD Menggunakan FLUENT. Informatika. Bandung.
[8] Deutschman, Aaron D. 1975. Machine Design, Theory and Practice. New York : Macmillan, Publishing Co., Inc.
[9] Moaveni S., “Finite Element Analysis Theory And Application With Ansys”, Prentice Hall, New Jersey, 1999