Abstract— Design of Application-Based Wireless Control Room Robot using two parts, hardware and software. In Hardware, using components ATMEGA8535, switch inputs, RS232 serial communications, motor drivers, USB to serial and others. Then on the side of the software using Visual Basic 6.0 programming language. As for additional libraries in Visual Basic uses avicap32 library to access the wireless cameras are used to perform the monitoring process. This research helps users in monitoring a room by using the robot through the applications and wireless media. Users can control the robot by pressing the keyboard or a button on the application. Then as feedback to the user, image data captured by a camera located at body wireless robot will be displayed in the application.
Keywords :Robot, wireless, ATMEGA8535, RS232serial communications, motor drivers, Visual Basic6.0
I.PENDAHULUAN
Perkembangan dunia robotika saat ini sangat pesat. Hal ini dapat dibuktikan dengan banyaknya teknologi dibidang robotika yang sengaja dibuat untuk membantu pekerjaan manusia. Jika manusia memiliki panca indera seperti mata untuk melihat, maka pada robot dapat berupa sensor seperti photodioda, sensor ultrasonic
untuk mendengar atau bahkan juga berupa kamera untuk melihat dan merekam.
Sensor-sensor yang telah disebutkan merupakan alat yang berfungsi sebagai masukan data pada robot. Pentransmisian data masukan tersebut terbagi menjadi 2 (dua) macam, yaitu pentransimisian data secara kabel (wire) dan nirkabel (wireless). Teknologi nirkabel merupakan sebuah teknologi pentransmisian data yang sekarang sedang pesat dikembangkan. Pada dasarnya, teknologi nirkabel menggunakan gelombang frekuensi radio dan infra merah (infrared) yang digunakan sebagai media pengiriman datanya. Teknologi nirkabel sangat banyak digunakan karena dinilai sangat efektif dan efisien. Ide penelitian ini berangkat dari judul tugas akhir yang pernah dibuat sebelumnya berjudul “Aplikasi Robot Kontrol Ruangan Dengan Output Paralel Port arah pergerakan robotnya. Proses pengiriman data dari kamera menuju komputer memanfaatkan komunikasi
wireless. Dengan menggunakan bantuan robot dan kamera wireless ini, memudahkan pekerjaan dalam mengontrol ruangan yang letaknya jauh dengan ruangan
user.
II.RUMUSANMASALAH
Dari permasalahan yang telah dijelaskan diatas, dapat diambil rumusan masalah, yaitu pengontrolan ruangan menggunakan kamera wireless sebagai panduan kontrol navigasi robot serta pengiriman data gambar melalui
wireless.
III. TUJUAN
Penelitian ini berfungsi sebagai kamera pemantau yang bisa mengawasi ruangan dari sudut pandang tertentu, karena kamera pemantau berada dibadan robot yang dapat digerakkan oleh user melalui aplikasi dan membuat robot yang berfungsi untuk membawa kamera
wireless agar dapat memantau ruangan dari sudut tertentu berdasarkan posisi robot dan arah pergerakannya yang dapat dikontrol oleh user.
Komponen robot terdiri antara lain : Mikrokontroler ATMega8535 sebagai pengontrol sebuah sistem sederhana maupun sebuah sistem yang kompleks. Pada penggunaan mikrokontroler, mikrokontroler harus terlebih dahulu diisi dengan program sesuai dengan apa yang diinginkan agar dapat berfungsi dengan baik. Mikrokontroler dapat menerima input data yang berasal dari hardware lainnya ataupun dari mikrokontroler itu sendiri yang kemudian akan diproses sesuai dengan program yang telah dimasukkan (di download) ke mikrokontroler. Setelah proses data selesai, maka mikrokontroler akan menghasilkan output, yang biasanya output dari mikrokontroler akan dihubungkan dengan hardware lainnya.
Pada penelitian ini mikrokontroler akan difungsikan sebagai pengontrol robot ruangan, yang data
Pada badan robot juga terdapat kabel data RS232 yang digunakan sebagai standar komunikasi serial antara client dan robot.
Untuk jaringan wifi pada penelitian ini digunakan sebagai media pentransmisian data pergerakan robot dari komputer server menuju komputer client.
Sedangkan kamera wireless menggunakan komunikasi
wireless berupa sinyal radio frekuensi yang digunakan untuk mengirimkan data gambar ke komputer server
yang nantinya akan ditampilkan ke user.
Pada perangkat keras (robot) juga terdapat Motor DC yang memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas diantara kutub-kutub magnet permanen1. Pada penelitian ini Motor DC digunakan untuk motor penggerak robot.
Di sisi perangkat lunak penelitian ini menggunakan Microsoft Visual Basic yang merupakan bahasa pemrograman yang sangat mudah dipelajari, dengan teknik pemrograman visual yang memungkinkan penggunanya untuk berkreasi lebih baik dalam menghasilkan suatu program aplikasi.
V.ANALISIS DAN PERANCANGAN
Cara kerja Aplikasi Kontrol Robot Ruangan Berbasis
Wireless ini menggunakan 2 macam wireless, yaitu: sinyal wifi sebagai pengiriman data arah pada robot dan sinyal radio frekuensi sebagai pengiriman data gambar ke komputer server. Pada komunikasi pengiriman data arah pada robot, terlebih dahulu user melakukan pengaturan alamat tujuan pengiriman data didasarkan pada pengaturan alamat IP tujuan (IP komputer client) yang di setting pada aplikasi. Sedangkan untuk pengiriman data gambar ke komputer server, dimulai dengan mengirimkan data gambar dari transmitter yang berada pada kamera ke receiver yang berada di komputer
server.
Robot bergerak sesuai masukan dari user. Sebagai umpan balik dari robot ke user, pada badan robot terdapat kamera wireless berupa sinyal radio frekuensi
1
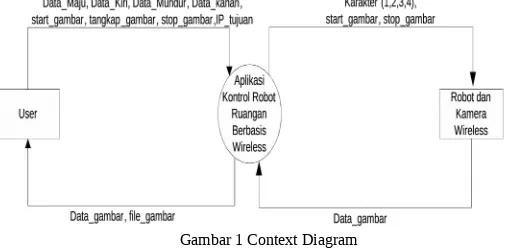
yang selalu menangkap gambar kondisi di depan robot (real time). Lalu data gambar tersebut dikirimkan ke komputer server melalui sinyal radio frekuensi, data gambar tersebut akan di tampilkan pada user. User juga dapat melakukan proses penangkapan gambar - gambar. Pada penjabaran diatas dapat digambarkan dengan
Context diagram dibawah ini :
Gambar 1 Context Diagram
Pada perancangan perangkat lunak dibagi menjadi 5 (lima) kategori yaitu pendeskripsian data, dekomposisi fungsional modul, spesifikasi kebergantungan antar layar perancangan antar muka dan struktur menu.
5.1 Deskripsi Data
Aplikasi ini memiliki data yang dikirim ke robot dalam bentuk perintah arah pergerakan robot. Data – data yang dikirimkan, diterima sebagai masukan oleh robot untuk melakukan intruksi atau perintah. Sedangkan data yang dikirimkan kepada aplikasi adalah data gambar yang telah ditangkap oleh kamera, yang disimpan pada storage dalam bentuk file gambar dengan format JPEG.
Tabel 1 Spesifikasi Rinci Data
5.2 Dekomposisi Fungsional Modul
Pada bagian ini berisi fungsi – fungsi yang digunakan dalam aplikasi beserta dengan proses yang dilakukan oleh fungsi tersebut.
5.3 Spesifikasi Kebergantungan Antar layar Pada penelitian ini, aplikasi hanya menggunakan 1 (satu) layar yaitu layar utama yang digambarkan dalam perancangan antarmuka.
5.4 Perancangan Antarmuka 5.4.1 Rancangan Tampilan Komputer Server Berikut gambar rancangan tampilan komputer server
Gambar 2 Rancangan Tampilan Komputer Server
5.4.2 Rancangan Tampilan Komputer Client Berikut gambar rancangan tampilan komputer client
Gambar 3 Rancangan Tampilan Komputer Client
5.5 Struktur Menu
Pada bagian ini berisi menu pengontrolan robot dan pengontrolan kamera.
Perancangan perangkat lunak telah dirancang sesuai penjabaran diatas, kemudian juga dibuat perancangan perangkat keras yang terdiri dari beberapa bagian
hardware. Hardware tersebut terdiri dari rangkaian elektronik dan mekanik robot yang dilengkapi dengan motor penggerak. Pada bagian ini akan dijelaskan secara singkat mengenai perancangan hardware. Untuk deskripsi sistem perangkat keras dapat dilihat pada
flowchart dibawah ini :
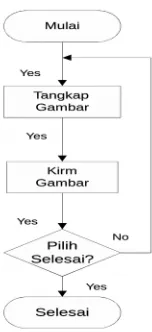
Gambar 4 Flowchart Perangkat Keras (Robot)
Gambar 5 Flowchart Perangkat Keras (Kamera)
Saat kamera diaktifkan, maka kamera akan langsung melakukan proses pengambilan gambar. Gambar – gambar yang telah ditangkap tersebut lalu dikirimkan menuju komputer server. Setelah proses pengiriman data gambar selesai dilakukan, maka kamera akan menunggu instruksi selanjutnya dari user. Jika user mengirimkan data berupa instruksi selesai (stop monitoring) maka kamera akan mengakhiri seluruh proses yang dikerjakan. Jika tidak, maka kamera akan melakukan proses tangkap dan kirim gambar lagi.
Pada perangkat keras juga terdapat rangkaian elektronik, rangkaian power supply, rangkaian minimum system ATmega8535, rangkaian Komunikasi serial RS232, rangkaian Driver Motor, rangkaian USB to Serial, dan rangkaian input sakelar manual.
Selain itu juga dibutuhkan downloader yang merupakan sebuah proses yang dilakukan untuk memasukkan program kedalam IC atau chip sesuai dengan program yang telah dibuat. Bahasa pemrogaman yang digunakan adalah bahasa C yang terdapat pada perangkat lunak AVR.
Setelah semua komponen dirangkai dan koding dimasukkan ke mikrokontroler, maka semua proses perancangan hardware telah selesai dilakukan.
VI. IMPLEMENTASI, PENGUKURANDANPENGUJIAN
6.1 Implementasi dan Pengujian Perangkat Lunak Penelitian ini menggunakan library yaitu: avicap32.dll. Library tersebut digunakan untuk mengakses kamera wireless yang digunakan untuk melakukan proses monitoring.
6.2 Implementasi dan Pengujian Komunikasi Serial Pengujian ini dilakukan untuk mengetahui berhasil tidaknya komunikasi serial antara aplikasi dengan
hardware. Adapun sub program untuk menguji aplikasi ini adalah sebagai berikut:
1. Program pada aplikasi
Private Sub cmdKirim_Click() SerialHP.PortOpen = True txtOut2Mikro.Text = txtIn.Text SerialHP.Output = txtOut2Mikro.Text SerialHP.PortOpen = True
End Sub
2. Program Pada Hardware
while (1) {
dataIn = getchar(); if(dataIn=='1') { maju();} };
Hasil Pengujian :
Data yang dikirimkan dari aplikasi akan terbaca pada
hardware. Hardware akan mengambil data tersebut dan kemudian memprosesnya. Jika data tersebut adalah “1”, maka hardware akan menjalankan fungsi maju.
6.3 Implementasi dan Pengujian Komunikasi Wifi
Untuk menguji kirim data melalui wifi maka dibuatlah sub program, seperti dibawah ini:
Private Sub cmdSend() Wifi.SendData txtOut.Text End Sub
Hasil Pengujian:
Setelah sub program dijalankan maka program akan mengirimkan data melalui wifi. Sub program ini membutuhkan komponen winsock yang digunakan untuk komunikasi Ethernet.Untuk menguji terima data melalui
wifi maka dibuatlah sub program seperti dibawah ini:
Private Sub Wifi_DataArrival(ByVal bytesTotal As Long)
Dim strData As String Wifi.GetData strData txtIn.Text = strData End Sub
Hasil Pengujian:
Setelah sub program dijalankan maka program akan menerima data melalui wifi. Sub program ini membutuhkan komponen winsock yang digunakan untuk komunikasi Ethernet. Data tersebut akan ditampilkan pada textbox bernama txtIn.
Pengujian ini dilakukan untuk mengetahui berhasil tidaknya proses tangkap gambar. Adapun sub program kirim gambar adalah sebagai berikut:
Setelah sub program dijalankan, maka aplikasi akan mengakses data gambar dari kamera yang kemudian diletakkan ke tempat penyimpanan sementara (Clipboard). Setelah itu, data yang ada pada penyimpanan sementara tersebut ditampilkan pada pictureBox(Picture1)lalu disimpan pada pentimpanan yang telah disediakan yaitu: capture dalam format (.JPEG).
6.5 Implementasi dan Pengujian Penekanan Tombol Pengujian ini dilakukan untuk mengetahui berhasil atau tidaknya pengambilan data dari penekanan tombol. Adapun sub program dari penekanan tombol keyboard
adalah sebagai berikut:
Private Sub Form_KeyDown(KeyCode As Integer, Shift As Integer)
If KeyCode = 38 Then txtData.Text = KeyCode End Sub program dari penekanan tombol interface adalah sebagai berikut:
Private Sub cmdMa_MouseDown(Button As Integer, Shift As Integer, X As Single, Y As Single)
a = 1 End Sub
Hasil Pengujian :
Setelah program dijalankan, maka saat ada penekanan tombol arah maju pada interface, txtData.Text akan berisi nilai yang sama dengan KeyCode.
6.6 Pengujian Keterhubungan Perangkat keras dengan Perangkat Lunak dilakukan yang berhubungan dengan komunikasi serial antara komputer client dan robot, yaitu :
1. Pengiriman data arah maju
Pengujian ini dilakukan dengan cara mengirimkan data serial berupa karakter ‘1’ dari komputer client
menuju robot. Pengiriman data ini akan mengakibatkan robot bergerak maju.
2. Pengiriman data arah mundur
Pengujian ini dilakukan dengan cara mengirimkan data serial berupa karakter ‘3’ dari komputer client
menuju robot. Pengiriman data ini akan mengakibatkan robot bergerak mundur.
3. Pengiriman data arah belok kiri
Pengujian ini dilakukan dengan cara mengirimkan data serial berupa karakter ‘2’ dari komputer client
menuju robot. Pengiriman data ini akan mengakibatkan robot bergerak kearah kiri (belok kiri).
4. Pengiriman data arah belok kanan
Pengujian ini dilakukan dengan cara mengirimkan data serial berupa karakter ‘4’ dari komputer client
menuju robot. Pengiriman data ini akan mengakibatkan robot bergerak kearah kanan (belok kanan).
5. Pengiriman data arah stop
Pengujian ini dilakukan dengan cara mengirimkan data serial berupa karakter ‘0’ dari komputer client
menuju robot. Pengiriman data ini akan mengakibatkan robot tidak bergerak.
kameranya. Setelah aplikasi mengizinkan receiver
kamera untuk menampilkan data gambar pada tampilan aplikasi, maka user dapat melihat kondisi di sekitar robot hanya melalui tampilan data gambar (pictureBox1) pada aplikasi. Jika aplikasi memutuskan akses terhadap
juga mengakibatkan tidak ada data gambar yang akan ditampilkan pada tampilan aplikasi (pictureBox1).
6.7 Analisa Aplikasi setelah Pengujian 6.7.1 Komunikasi data wireless menggunakan wifi Komunikasi data wireless menggunakan wifi pada aplikasi menggunakan komponen winsock. Pada komunikasi ini, alamat tujuan pengiriman data didasarkan pada pengaturan alamat IP tujuan (IP komputer client) yang diletakkan pada aplikasi. Komunikasi wireless ini menggunakan sinyal wifi
sebagai media pentransmisian data. Selama komputer
server dan komputer client berada disatu daerah dengan sumber sinyal wifi yang sama, maka komunikasi masih tetap bisa dilakukan. Cakupan daerah komunikasi antara komputer server dan client tergantung luasnya daerah sumber sinyal wifi, namun pentransmisian data tidak selalu berjalan lancar. Hal ini bisa disebabkan oleh tidak stabilnya kekuatan sinyal wifi yang digunakan dan padatnya lalulintas data pada jaringan tersebut, sehingga menyebabkan RTO (Request Timed Out).
Alternatif lain selain menggunakan wifi dalam pentransmisian data pengontrolan robot adalah menggunakan Ad hoc. Tetapi kekurangan dari Ad hoc itu sendiri adalah jaringannya yang bersifat sementara karena tidak menggunakan access point.
Protokol termasuk salah satu penyebab gagalnya komunikasi dikarenakan protokol yang digunakan dalam pentransmisian data adalah protokol UDP. Pada protokol ini, jika data tidak sampai ke tujuan pengiriman, atau mengalami kerusakan, maka data tidak akan dikirimkan kembali, sehingga komunikasi antara komputer server
dan komputer client akan terganggu bahkan terhambattuk untuk penelitian lebih lanjut untuk menutup kekurangan penelitian. Tidak memuat saran-saran diluar untuk penelitian lanjut.
6.7.2 Komunikasi Data Serial
Komunikasi data serial merupakan komunikasi yang digunakan untuk mengirimkan data dari komputer client
menuju robot. Komunikasi ini menggunakan komponen MSComm pada aplikasi. Komunikasi yang digunakan merupakan komunikasi serial dengan standart komunikasi RS232. Pada komunikasi ini data akan langsung dikirimkan menuju robot melalui port serial komputer client. Kendala yang dihadapi sering tidak terdeteksi COM Port pada komputer dan COM tidak support selain windows XP.
6.7.3 Akses Kamera Wireless
Pengaksesan data gambar yang dikirimkan oleh kamera dilakukan dengan cara mengakses receiver
kamera wireless. Dengan pengaksesan ini, maka akan
didapatkan data gambar yang merupakan hasil tangkap gambar yang dilakukan oleh kamera. Disini terdapat kendala yang dihadapi pada saat penginstalan driver
kamera wireless yaitu: driver kamera wireless tidak support pada Operating System diatas Windows XP.
6.7.4 Penekanan Tombol Keyboard
Penekanan tombol keyboard akan menghasilkan sebuah bilangan, bilangan tersebut merupakan kode ASCII dari huruf pada keyboard yang sedang ditekan. Penekanan tombol tersebut digunakan pada aplikasi untuk mengakses beberapa fungsi yang ada pada sub program.
6.8 Pengukuran dan Pengujian Perangkat Keras
Pengukuran mempunyai tujuan untuk mengetehui kinerja dari suatu sistem yang telah dirancang apakah sesuai dengan spesifikasi atau tidak. Adapun alat yang digunakan dalam pengukuran penelitian ini ialah dengan menggunakan multimeter. Pengukuran yang dilakukan yaitu terhadap power supply,hasil output mikrokontroler dan driver motor.
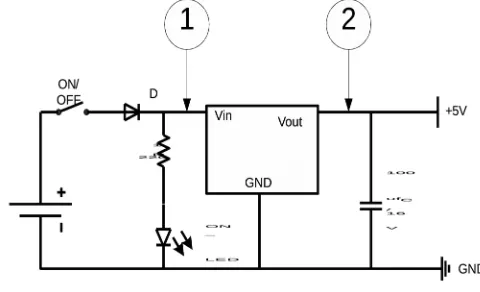
Pengukuran keluaran tegangan catu daya dilakukan agar mengetahui seberapa stabil tegangan keluaran pada rangkaian catu daya. Pada rangkaian ini dilakukan 1 jenis regulator pada catu daya yaitu IC 7805. Pada pengukuran tersebut membandingkan 2 hasil pengukuran yaitu tegangan yang belum masuk ke IC pada titik 1 dan tegangan sesudah masuk ke IC pada titik 2.
Gambar 6 Rangkaian Power Supply
Tabel 2 Hasil Pengukuran Power Supply
Test Point (Tegangan VDC)
1 7,8
Pengukuran pada output mikrokontroler berfungsi untuk mengetahui tegangan yang masuk dan keluar dari mikrokontroler yang akan digunakan sebagai input
rangkaian driver motor. Berikut hasilnya dibawah ini :
Tabel 3 Hasil Pengukuran Output Mikrokontroler
Pergera kan Robot
Pengukuran Tegangan (VDC) testp
oin testpoin testpoin testpoin testpoin testpoin
1 2 3 4 5 6
Maju 5.1 0 3.1 5.1 5.1 0
Mundur 0 5.1 2.4 5.1 0 5.1
Belok
Kanan 5.1 0 2 3.2 5.1 0
Belok
Kiri 0 5.1 3.2 2 0 5.1
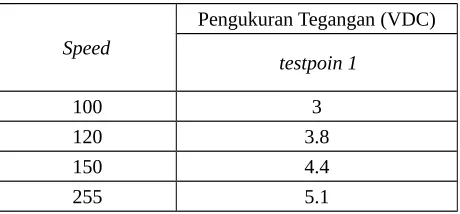
Pengukuran pada driver motor berfungsi untuk mengetahui tegangan yang masuk ke motor yang berfungsi untuk menggerakkan roda robot.
Gambar 7 Rangkaian Driver Motor
Tabel 4 Hasil Pengukuran Rangkaian Driver Motor
Speed
Pengukuran Tegangan (VDC)
testpoin 1
100 3
120 3.8
150 4.4
255 5.1
VII. KESIMPULANDANSARAN
Adapun Kesimpulan dari peneltian ini adalah sebagai berikut :
1.Pengontrolan robot melalui komputer dapat dilakukan dengan cara menekan tombol arah pada keyboard
ataupun dengan mendekatkan cursor ke tombol yang ada pada tampilan.
2.Penggunaan komputer client masih membatasi ruang gerak robot, karena masih terkendala dengan kabel penghubung.
3.Aplikasi pada komputer server dan komputer client
dapat berkomunikasi melalui jaringan wifi.
4.Aplikasi belum dapat merekam gambar dalam bentuk video.
5.Kamera tidak dapat melakukan zoom in atau zoom out, pergerakan arah atas dan bawah.
6.Perangkat keras mampu menerima data dari komputer
client dan memproses data tersebut menjadi pergerakan robot.
Sedangkan saran-saran untuk pengembangan penelitian adalah sebagai berikut :
1.Komputer client dapat diganti dengan sebuah perangkat berbasis windows mobile ataupun android. 2.Dapat merekem gambar berupa video.
3.Untuk kamera dapat melakukan zoom in dan zoom out
dan pergerakan arah atas dan bawah.
VIII. DAFTARPUSTAKA
[1] Budiharto, Widodo dan Rizal, Gamayel.2007. 12 Proyek Mikrokontroler Untuk Pemula. Jakarta : Elex Media.
[2] Green, DC.1995.Komunikasi Data.Yogyakarta : ANDI OFFEST.
[3] Heriadi, Dodi.2005.Jaringan Wi-Fi. Jakarta : C.V ANDI OFFEST
[4] http://id.wikipedia.org/wiki/Robot, diakses pada tanggal 23 September 2010. [5] Wyatt, J. C, Spiegelhalter, D, 2008, Field Trials of Medical Decision-Aids: Potential Problems and Solutions,
Proceeding of 15th Symposium on Computer Applications in Medical Care, Washington, May 3.
[5] http://id.wikipedia.org/wiki/
[6] http://www.megatron.biz/spycam.htm, diakses pada tanggal 23 September 2010.
[7] http://diediecs.blogspot.com/2009/04/sejarah-wifi.html diakses tanggal 11 Oktober 2010 [8] http://hamdanramdhani.files.wordpress.com
/2008/04/makalah-port-usb.pdf, diakses pada tanggal 23 September 2010.
[9] http://www.infosum.net/id/hardware/history-of-usb-port-explained-usb-port-simplifed.html [10] http://staff.ui.ac.id/internal/040603019/
material/DCMotorPaperandQA.pdf
[11] http://shirotholmustaqim.files.wordpress.com / 2010/02/dasar-pemrograman-visual-basic1.pdf [12] Stallings, William.2001.Komunikasi Data dan
Komputer Dasar –Dasar Komunikasi Data. Jakarta: Salemba Teknika