V PENUTUP 5.1 Kesimpulan
Berdasar hasil penelitian dan pembahasan dapat disimpulkan bahwa :
1. Berdasae hasil pengujian, enkoder HT12E dan dekoder HT12D telah dapat berfungsi dengan baik sebagaimana yang diharapkan.
2. Berdasar hasil pengujian, terlihat bahwa data yang dikirim TLP434A dengan data yang diterima RLP434A hampir sama, hal ini menunjukkan bahwa TLP434A telah dapat mengirimkan data dan RLP434A dapat menerima data sesuai dengan yang diinginkan. Adanya sedikit perbedaan dikarenakan adanya rugi-rugi derau
.
3. Agar komunikasi dapat dilakukan, maka kondisi TE harus “0” (diketanahkan) karena TE aktif low, bit alamat antara HT12E dan HT12D harus sama, nilai Rosc dari HT12D sekitar 50 kali dari Rosc HT12E.
4. Berdasar hasil pengujian, terlihat jika terdapat ketidakcocokan bit alamat HT12E dan HT12D, maka komunikasi tidak dapta dilakukan. Dengan demikian dapat dimanfaatkan untuk menambah keamanan data yang ditransmisikan.
5.2 Saran
1. Jika diinginkan untuk aplikasi yang membutuhkan komunikasi jarak yang lebih jauh, dapat digunakan TLP434 0,5 W yang memiliki daya pancar yang lebih kuat daripada TLP434A.
2. TLP434 dan RLP434 dapat digunakan pada aplikasi lain, seperti pada remote kontrol, pembuka garasi otomatis, sistem alarm mobil dan lain - lain.
DAFTAR PUSTAKA
[1] Coughlin, F. Robert, Penguat Operasional dan Rangkaian Terpadu Linear, Diterjemahkan oleh Herman Widodo S, Erlangga, Jakarta, 1994.
[2] Millman, Halkias, Elektronika Terpadu, Erlangga , Jakarta, 1997.
[3] Schwartz, Mischa, Transmisi Informasi, Modulasi dan Bising, Erlangga, Jakarta, 1986.
[4] Sudjadi, Teori dan Aplikasi Mikrokontroler, Aplikasi pada Mikrokontroler AT89C51, Graha Ilmu, Yogyakarta, 2005.
[5] Setiawan Rachmad, Mikrokontroler MCS-51, Graha Ilmu, Yogyakarta, 2006.
[6] Putra, Agfianto Eko, Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Gaya Media, Yogyakarta, 2002.
[7] Prasetia Ratna & Widodo, Edi Catur, Interfacing Port Pararel dan Port Serial komputer dengan Visual Basic 6.0, Penerbit Andi, Yogyakarta, 2004.
[8] …… http://www.nullmodem.com/DB-25.htm.
[9] Malvino, Paul Albert, Prinsip – Prinsip Elektronika Jilid I, Diterjemahkan oleh Sahat Pakpahan, Erlangga, Jakarta, 1996.
[10] Wasito, S, Vademekum Elektronika Edisi Kedua, PT Gramedia Pustaka Utama, Jakarta 2001.
[11] Cooper, George, Modern Communications and Spread Spectrum, McGraw Hill Book Company, Singapore 1986.
[12] Erwin, Robert M, Pengantar Telekomunikasi, PT Elex Media Komputindo, Jakarta, 1986.
[13] …….http://www.electroniclab.com.
BIODATA PENULIS
Bambang Sugiyono, terlahir di kota Semarang pada tanggal 21 Oktober 1985. Telah menjalani pendidikan di Taman Kanak-Kanak Budi Luhur Semarang, Sekolah Dasar Negeri Kalibanteng Kidul 02, Sekolah Dasar Negeri Lebdosari 02, Sekolah Lanjutan Tingkat Pertama Negeri 19 Semarang, Sekolah Menengah Umum Negeri 3 Semarang. Dan sekarang tengah menyelesaikan pendidikan Strata Satu di Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro, Semarang, Indonesia.
Menyetujui, Dosen Pembimbing I,
Achmad Hidayatno, ST, MT NIP. 132 137 933
Dosen Pembimbing II,
Yuli Christiyono, ST, MT NIP. 132 163 660
14 Berdasar pengujian diperoleh hasil sebagai berikut :
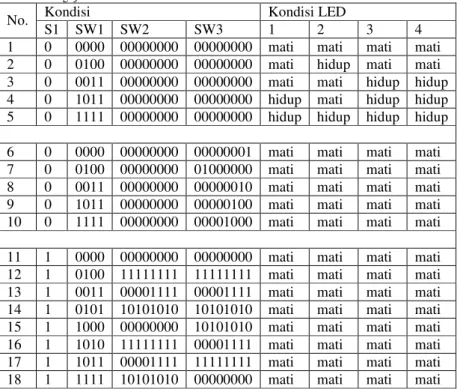
Tabel 8 Pengujian sistem keseluruhan
* kondisi 0 pada S1, SW1, SW2, SW3 adalah kondisi saat saklar dihubungkan(ditekan), kondisi 1 adalah saat saklar terbuka (dilepas).
Berdasar Tabel 8 pada nomor 6 sampai 10 terlihat kondisi LED semuanya mati, hal ini disebabkan karena kondisi SW2 dan SW3 yang berbeda. Maka dapat disimpulkan bahwa jika bit alamat dari HT12E dan HT12D berbeda, komunikasi tidak dapat terjadi karena jika pada HT12D mendeteksi bit alamat yang tidak sesuai dengan bit alamat yang dimilikinya, pengkodean berhenti pada HT12D sehingga LED tidak menerima tegangan atau mati. Sedangkan pada nomor 11 sampai 18 kondisi LED semuanya juga mati, dengan nilai S1(TE) pada kondisi “1”. Hal ini terjadi karena saklar TE merupakan pengontrol apakah data yang telah dikodekan HT12E akan ditransmisikan atau tidak dan TE bersifat aktif low, sehingga aktif jika diberikan kondisi “0” atau saklar dalam posisi diketanahkan. Dari pengujian yang telah dilakukan dapat diambil kesimpulan bahwa yang mempengaruhi komunikasi ini dapat dilakukan adalah kondisi TE harus “0”, bit alamat antara HT12E dan HT12D harus sama, nilai Rosc dari HT12E sekitar 50 kali dari Rosc HT12D. Jarak antara pemancar dan penerima tidak lebih dari 110 m.
Kondisi Kondisi LED
No. S1 SW1 SW2 SW3 1 2 3 4
1 0 0000 00000000 00000000 mati mati mati mati 2 0 0100 00000000 00000000 mati hidup mati mati 3 0 0011 00000000 00000000 mati mati hidup hidup 4 0 1011 00000000 00000000 hidup mati hidup hidup 5 0 1111 00000000 00000000 hidup hidup hidup hidup 6 0 0000 00000000 00000001 mati mati mati mati 7 0 0100 00000000 01000000 mati mati mati mati 8 0 0011 00000000 00000010 mati mati mati mati 9 0 1011 00000000 00000100 mati mati mati mati 10 0 1111 00000000 00001000 mati mati mati mati 11 1 0000 00000000 00000000 mati mati mati mati 12 1 0100 11111111 11111111 mati mati mati mati 13 1 0011 00001111 00001111 mati mati mati mati 14 1 0101 10101010 10101010 mati mati mati mati 15 1 1000 00000000 10101010 mati mati mati mati 16 1 1010 11111111 00001111 mati mati mati mati 17 1 1011 00001111 11111111 mati mati mati mati 18 1 1111 10101010 00000000 mati mati mati mati
Tabel 6 Pengukuran tegangan sebelum rangkaian transistor
Berdasar Tabel 6 terlihat bahwa nilai tegangan paralel besarnya rata-rata 5 volt untuk data ‘1’, sedangkan pada Tabel 6 besarnya merupakan pembagian secara merata dari tegangan serialnya. Hal ini terjadi karena transistor yang berfungsi sebagai penguat dengan penguatan yang besarnya adalah sebagai berikut : Av = Vo/Vi
Dengan Av adalah penguatan tegangan Vo adalah tegangan masukan Vi adalah tegangan keluaran Maka untuk data urut ke-2 nilai Av Av = Vo/Vi = 5/1,515 = 3,3 kali
Tabel 7 Pengukuran penguatan tegangan
Berdasar Tabel 7 di atas terlihat pada data 0001 terjadi penguatan sebesar 3,30 kali, lalu saat data 0101 terjadi penguatan rata-rata 6,3 kali. Pada data 1101 penguatan rata-rata sebesar 9,1 kali dan data 1111 penguatan sebesar 11,8 kali. Maka dapat disimpulkan bahwa semakin banyak jumlah alat yang dikendalikan,
maka semakin besar penguatan yang dibutuhkan dan penguatan dibatasi hingga level tegangan 5 volt.
4.8 Pengujian sistem keseluruhan
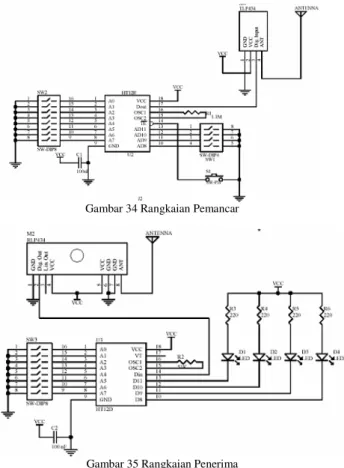
Pengujian sistem secara keseluruhan dilakukan setelah masing-masing blok diuji terlebih dahulu. Berikut ini adalah gambar pengujian sistem secara keseluruhan.
Gambar 34 Rangkaian Pemancar
Gambar 35 Rangkaian Penerima Tegangan paralel (V)
No. Data
Tegang -an serial
(V)
1 2 3 4
1 0 0 0 0 1,447 0,0001 0 0 0
2 0 0 0 1 1,516 0 0 0 1,515
3 0 0 1 0 1,514 0 0 1,512 0
4 0 0 1 1 1,580 0 0,0001 0,787 0,790
5 0 1 0 0 1,516 0 1,516 0 0
6 0 1 0 1 1,584 0 0,791 0 0,790
7 0 1 1 0 1,580 0 0,788 0,789 0
8 0 1 1 1 1,650 0 0,562 0,551 0,540
9 1 0 0 0 1,500 1,499 0 0 0
10 1 0 0 1 1,583 0,786 0 0 0,791
11 1 0 1 0 1,585 0,793 0 0,789 0
12 1 0 1 1 1,652 0,550 0 0,550 0,550
13 1 1 0 0 1,583 0,790 0,788 0 0
14 1 1 0 1 1,650 0,550 0,552 0 0,554 15 1 1 1 0 1,652 0,550 0,552 0,551 0 16 1 1 1 1 1,700 0,420 0,421 0,425 0,430
Penguatan (kali) No
. Data Tega ngan serial (V)
1
1 0000 1,447 0 1 0000 1,447
2 0001 1,516 0 2 0001 1,516
3 0010 1,514 0 3 0010 1,514
4 0011 1,580 0 4 0011 1,580
5 0100 1,516 0 5 0100 1,516
6 0101 1,584 0 6 0101 1,584
7 0110 1,580 0 7 0110 1,580
8 0111 1,650 0 8 0111 1,650
9 1000 1,500 3,34 9 1000 1,500 10 1001 1,583 6,37 10 1001 1,583 11 1010 1,585 6,31 11 1010 1,585 12 1011 1,652 9,11 12 1011 1,652 13 1100 1,583 6,33 13 1100 1,583 14 1101 1,650 9,11 14 1101 1,650 15 1110 1,652 9,11 15 1110 1,652 16 1111 1,700 11,9 16 1111 1,700
12 cara yang lain. Pada kesempatan ini pengujian RLP434A dilakukan seperti gambar di bawah ini:
CHA CHB OSILOSKOP
Penerima Keluaran
Pemancar Sinyal Uji
Gambar 32 Pengujian RLP434A
Pada pengujian ini, RLP434A diuji dengan beberapa variasi data masukan. Pertama, alamat HT12E diatur pada kondisi yang sama yaitu 00000000 dan DIP switch 4 bit yang terhubung dengan HT12E diberikan masukan dengan urutan data biner 1 1 1 1, maka seharusnya pada osiloskop juga terlihat urutan data biner yang sama. Pada osiloskop dapat dilihat hasil seperti ini.
Gambar 33 Hasil pengujian RLP434A dengan masukan 1 1 1 1
Ternyata data yang diterima benar, dengan demikian RLP434A dapat berfungsi dengan baik
4.5 Pengujian fungsi address dekoder
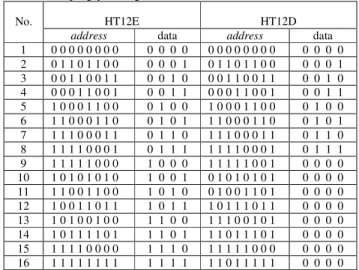
Pada enkoder HT12E dan dekoder HT12D terdapat bit address yang berfungsi agar data yang diterima merupakan data yang dikirim dari pasangan enkoder dan dekoder yang diinginkan. Dengan demikian, keamanan data terjamin dari adanya interferensi dari pihak lain, sehingga data yang diterima dekoder adalah data yang benar - benar dikirim dari enkoder yang merupakan pasangan dekoder tersebut. Pengujian dilakukan dengan mengamati gelombang hasil keluaran pada HT12D dengan menggunakan osiloskop. Hasil pengamatan osiloskop dapat dilihat pada tabel 3.
Tabel 3 Hasil pengujian fungsi address data
HT12E HT12D
No.
address data address data
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 1 1 0 1 1 0 0 0 0 0 1 0 1 1 0 1 1 0 0 0 0 0 1 3 0 0 1 1 0 0 1 1 0 0 1 0 0 0 1 1 0 0 1 1 0 0 1 0 4 0 0 0 1 1 0 0 1 0 0 1 1 0 0 0 1 1 0 0 1 0 0 1 1 5 1 0 0 0 1 1 0 0 0 1 0 0 1 0 0 0 1 1 0 0 0 1 0 0 6 1 1 0 0 0 1 1 0 0 1 0 1 1 1 0 0 0 1 1 0 0 1 0 1 7 1 1 1 0 0 0 1 1 0 1 1 0 1 1 1 0 0 0 1 1 0 1 1 0 8 1 1 1 1 0 0 0 1 0 1 1 1 1 1 1 1 0 0 0 1 0 1 1 1 9 1 1 1 1 1 0 0 0 1 0 0 0 1 1 1 1 1 0 0 1 0 0 0 0 10 1 0 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 0 0 0 11 1 1 0 0 1 1 0 0 1 0 1 0 0 1 0 0 1 1 0 1 0 0 0 0 12 1 0 0 1 1 0 1 1 1 0 1 1 1 0 1 1 1 0 1 1 0 0 0 0 13 1 0 1 0 0 1 0 0 1 1 0 0 1 1 1 0 0 1 0 1 0 0 0 0 14 1 0 1 1 1 1 0 1 1 1 0 1 1 1 0 1 1 1 0 1 0 0 0 0 15 1 1 1 1 0 0 0 0 1 1 1 0 1 1 1 1 1 0 0 0 0 0 0 0 16 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 0 0 0 0
Tabel 3 merupakan pengujian yang dilakukan dengan variasi bit data dan address, pada pengujian ke-1 hingga ke-8, nilai bit address dari HT12E dan HT12D sama. Data yang dikirim HT12E dan data yang diterima HT12D juga sama. Pada pengujian ke-9 hingga ke-16, nilai address antara HT12E dan HT12D tidak sama sehingga data yang dikirim HT12E tidak dapat diterima HT12D dan menunjukkan nilai awal data HT12D yaitu 0 0 0 0. Hal ini membuktikan bahwa dengan adanya pengaruh terhadap ketidakcocokan address HT12E dan HT12D, dengan demikian dapat dimanfaatkan menambah keamanan data yang ditransmisikan.
4.6 Pengujian Jarak
Jarak pancar TLP434A mencapai 100 m, pada pegujian yang dilakukan pada beberapa tempat, hasil pengujian dapat dilihat pada Tabel 4 berikut ini :
Tabel 4 Pengujian jarak
Berdasar Tabel 4 diketahui bahwa jarak pancar TLP mencapai sekitar 100 m, hal ini terjadi pada kondisi yang tidak LOS (Line Of Sight). Jika dilakukan pada kondisi LOS maka jarak pancar TLP434A dapat mencapai hingga 130 m.
4.7 Pengujian pengaruh adanya penambahan transistor
Adanya rangkaian transistor yang dipasang setelah pin data pada HT12D mempunyai fungsi sebagai saklar dan penguat tegangan. Hal ini dilakukan karena pada proses perubahan dari serial ke paralel yang terjadi, HT12D membagi tegangan serial sehingga perlu adanya penguatan. Berikut ini data hasil pengukuran tegangan setelah adanya rangkaian transistor :
Tabel 5 Pengukuran tegangan setelah rangkaian transistor No
. Letak pemancar Letak penerima Perkiraa n jarak
Kondisi data yang diterima
1 Lab. KPS Lab. Kom. 5 m Sesuai
2 Lab. KPS Lab. Elka 6 m Sesuai
3 Lab. KPS Lab. Power 15 m Sesuai
4 Lab. KPS HME 20 m Sesuai
5 Lab. KPS Ruang B.202 5 m Sesuai
6 Lab. KPS Lab Power lt3 12 m Sesuai
7 Lab. KPS luar Pos parkir 108 m Sesuai
8 Pos parkir Lab. KPS 112 m Sesuai
Tegangan paralel (V) No. Data
Tegang -an serial
(V)
1 2 3 4
1 0 0 0 0 1,447 0,0001 0 0 0
2 0 0 0 1 1,516 0 0 0 5
3 0 0 1 0 1,514 0,0001 0 5 0
4 0 0 1 1 1,580 0 0,0001 5 5
5 0 1 0 0 1,516 0 5 0,0001 0,0001
6 0 1 0 1 1,584 0,0002 5 0 5,02
7 0 1 1 0 1,580 0,0002 5 5 0
8 0 1 1 1 1,650 0 5 5 5
9 1 0 0 0 1,500 5 0 0 0
10 1 0 0 1 1,583 5,01 0 0 5
11 1 0 1 0 1,585 5 0 5 0
12 1 0 1 1 1,652 5,01 0 5 5
13 1 1 0 0 1,583 5 5 0 0
14 1 1 0 1 1,650 5 5 0 5,02
15 1 1 1 0 1,652 5,01 5 5 0
16 1 1 1 1 1,700 5 5,01 5 5
Tabel 2 Hasil pengujian HT12D
4.3 Pengujian TLP434A
Untuk mengetahui bahwa TLP434A dapat mengirimkan data dengan baik, maka terlebih dahulu harus dilakukan pengujian terhadapnya. Cara menguji modul RF biasanya dapat dilakukan dengan memberikan logika ‘1’ atau ‘0’ pada modul transmitter, kemudian gelombang tersebut diterima oleh modul receiver dan keluarannya juga ‘1’ atau ‘0’ sesuai dengan logika yang dikirimkan. Pada modul-modul tertentu hal tersebut tidak dapat dilakukan, karena adanya batas kecepatan minimal di dalam pengiriman data.
Modul TLP434 tidak dapat diuji dengan cara memberikan logika 1 atau 0 saja, tetapi harus diberikan pulsa. Sumber pulsa dapat bermacam - macam antara lain, dari Function generator, Timer, dan lain-lain.
CHA CHB OSILOSKOP
Penerima Keluaran Pemancar
Sinyal Uji
Gambar 29 Pengujian TLP434A dengan RLP434 dan osiloskop
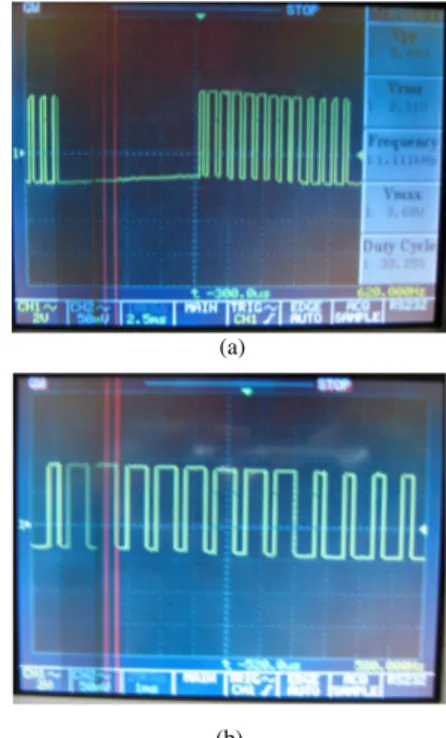
Pada pengujian ini, sinyal uji menggunakan gelombang kotak dengan dua variasi, yaitu mengunakan gelombang kotak keluaran HT12E dan yang kedua dari function generator. Pada osiloskop terlihat gelombang kotak yang dikirim seperti Gambar 30 dan Gambar 31 menunjukkan gelombang diterima.
(a)
(b)
Gambar 30 Sinyal uji (a)dari HT12E; (b)dari function generator
(a)
(b)
Gambar 31 Sinyal keluaran (a)dari HT12E; (b)dari function generator
Berdasar Gambar 30 dan Gambar 31 terlihat bentuk gelombang hampir sama, hal ini menunjukkan bahwa TLP434A telah dapat mengirimkan data sesuai dengan yang diinginkan. Adanya sedikit perbedaan dikarenakan adanya rugi-rugi derau
.
4.4 Pengujian RLP434A
Sebenarnya pengujian RLP434A juga sudah teruji seiring dengan pengujian TLP434A dengan menggunakan osiloskop, namun untuk lebih menyakinkan, maka dilakukan pengujian lagi dengan
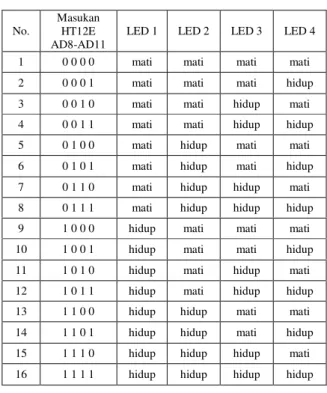
No.
Masukan HT12E AD8-AD11
LED 1 LED 2 LED 3 LED 4
1 0 0 0 0 mati mati mati mati
2 0 0 0 1 mati mati mati hidup
3 0 0 1 0 mati mati hidup mati
4 0 0 1 1 mati mati hidup hidup
5 0 1 0 0 mati hidup mati mati
6 0 1 0 1 mati hidup mati hidup
7 0 1 1 0 mati hidup hidup mati
8 0 1 1 1 mati hidup hidup hidup
9 1 0 0 0 hidup mati mati mati
10 1 0 0 1 hidup mati mati hidup
11 1 0 1 0 hidup mati hidup mati
12 1 0 1 1 hidup mati hidup hidup
13 1 1 0 0 hidup hidup mati mati
14 1 1 0 1 hidup hidup mati hidup
15 1 1 1 0 hidup hidup hidup mati
16 1 1 1 1 hidup hidup hidup hidup
10 sampai dengan VDD atau pin dibiarkan terbuka untuk mendapatkan kondisi high "1". Pin dihubungkan ke ground untuk mendapatkan kondisi low "0" dan pada pengujian ini digunakan DIP switch 4 bit yang dihubungkan ke pin AD8, AD9, AD10, AD11 pada HT12E sebagai masukan pengkondisi. Kemudian pada pin DOUT pada HT12E ditinjau keluarannya dengan menggunakan osiloskop, seperti ditunjukkan pada gambar di bawah ini :
CHA CHB OSILOSKOP
Keluaran HT12E
DIP Swicth
Gambar 27 Pengujian HT12E
Pada saat DIP switch diatur pada kondisi high
"1" pada pin AD8 sampai dengan AD11 dan pin TE diketanahkan untuk mendapatkan kondisi “0” karena TE aktif low, pada osiloskop menunjukkan seperti Gambar 28 berikut :
(a)
(b)
Gambar 28 Alamat=00000000 data=1111 (a) informasi lengkap (b) informasi tanpa periode pilot
Gambar 28 menunjukkan urutan data yang dikirimkan mulai dari pertama, AD8 hingga AD11 menunjukkan kondisi masukan pada pin AD8 sampai dengan AD11 pada kondisi low "1" sedangkan kondisi alamat pada 00000000. Berdasar Gambar 28 dapat disimpulkan bahwa dari kondisi masukan yang diberikan pada DIP switch dengan keluaran HT12E telah sesuai, maka dengan demikian dapat disimpulkan bahwa enkoder HT12E telah dapat berfungsi dengan baik sebagaimana yang diharapkan.
4.2 Pengujian dekoder HT12D
Setelah dilakukan pengujian terhadap enkoder HT12E maka perlu dilakukan pengujian terlebih dahulu pada blok dekoder HT12D. Hal ini perlu dilakukan untuk menghindari kesalahan penerimaan data. Pengujian pada dekoder ini dilakukan dengan cara memberi masukan data pada pin AD8, AD9, AD10, AD11 pada HT12E kemudian dilihat hasil keluaran dari HT12D. Data masukan berupa tegangan atau pin dibiarkan terbuka untuk mendapatkan kondisi high "1". Pin dihubungkan ke ground untuk mendapatkan kondisi low "0" dan pada pengujian ini digunakan DIP switch 4 bit yang dihubungkan ke pin AD8, AD9, AD10, AD11 pada HT12E sebagai masukan pengkondisi. Kemudian pada pin DOUT pada HT12E langsung dihubungkan dengan pin DIN pada HT12D, seperti ditunjukkan pada Gambar 4.1 di bawah ini.
Keluaran HT12E
DIP Swicth HT12D
DIP Swicth A0-A7
Gambar 4.5 Pengujian HT12D
Pada saat DIP switch diatur pada kondisi high
"1" pada pin A0 sampai dengan A7 pada LED menunjukkan seperti Tabel 4.1 berikut :
Tabel 2 menunjukkan hasil pengujian HT12D.
Pada hasil pengujian yang pertama (pada Tabel 4.1 no.1) dapat dilihat kondisi masukan pada pin AD8 sampai dengan AD11 adalah low (0). LED menunjukkan keadaan mati semua, hal ini berarti data masukan seharusnya 0 0 0 0, jadi data yang dikirim telah diterima dengan benar. Pada tabel no.14 DIP switch dikondisikan memberi masukan dengan urutan dari AD8 hingga AD11 adalah 1 1 0 1 dan terlihat pada tabel bahwa nyala LED berurutan adalah hidup-hidup-mati-hidup, hal ini menunjukkan kondisi LEDbila diubah ke biner adalah 1 1 0 1, dengan demikian urutan data yang dikirimkan pertama mulai dari AD8 hingga AD11 telah diterima dengan benar. Selanjutnya dapat diketahui bahwa enkoder HT12D telah dapat berfungsi dengan baik sebagaimana yang diharapkan dan ketepatan penerimaan data 100 %, hal ini menunjukkan bahwa dekoder HT12D merupakan pasangan yang tepat untuk enkoder HT12E.
akan tetap sama hingga data yang baru diterima.
Keluaran bit data merupakan data paralel 4 bit yang nantinya akan digunakan untuk mengendalikan peralatan listrik rumah.
Data paralel keluaran dari HT12D dapat langsung dihubungkan ke plant, namun karena perubahan dari data serial ke paralel terjadi pembagian tegangan, maka diperlukan rangkaian transistor seperti Gambar 24.
Gambar 24 Rangakaian transistor sebagai saklar
Dari rangkaian transistor kemudian data dikirim ke plant dengan rangkaian seperti pada Gambar 25 yang menggunakan sistem pemutus tegangan dengan transistor yang digunakan sebagai saklar. Pada saat transistor mencapai keadaan jenuh, arus akan mengalir dari basis ke kolektor. Sebaliknya saat transistor mencapai keadaan cut-off arus mengalir dari basis ke emitter.
Gambar 25 Rangkaian plant
Cara kerja rangkaian di atas adalah blok penerima meneruskan perintah berupa tegangan 5 volt atau tegangan 0 volt. Blok rangkaian transistor mempunyai empat jalur data, empat jalur data ini terhubung ke masing - masing terminal. Apabila keluaran dari rangkaian transistor memberikan tegangan 5 volt maka arus mengalir dari basis ke kolektor dan membuat emiter dan kolektor menjadi hubung tutup sehingga terdapat arus mengalir melewati saklar dan menggerakkan saklar tersebut, menyebabkan saklar yang mempunyai kondisi awal normally open menjadi close,
sehingga alat elektronik yang terhubung pada saklar tersebut menjadi hidup.
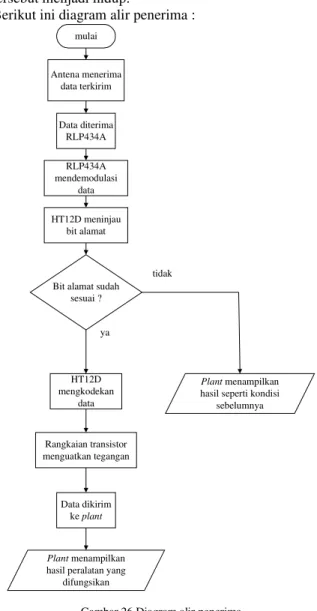
Berikut ini diagram alir penerima :
mulai
Antena menerima data terkirim
Plant menampilkan hasil peralatan yang
difungsikan Data diterima
RLP434A
RLP434A mendemodulasi
data
HT12D mengkodekan
data
Rangkaian transistor menguatkan tegangan
Data dikirim ke plant Bit alamat sudah
sesuai ? HT12D meninjau
bit alamat
ya
tidak
Plant menampilkan hasil seperti kondisi
sebelumnya
Gambar 26 Diagram alir penerima
IV PENGUJIAN DAN ANALISIS SISTEM Setelah sistem nirkabel selesai dibuat selanjutnya perlu dilakukan pengujian dan analisis untuk membuktikan bahwa konsep - konsep telah diterapkan dan sistem dapat berfungsi seperti yang diharapkan.
Pengujian dilakukan pada masing-masing blok yaitu pengujian HT12E dan HT12D, pengujian pemancar TLP434A dan bagian penerima RLP434A, jarak yang dapat dijangkau, analisis fungsi bit alamat sebagai keamanan,analisis fungsi transistor sebagai penguat.
4.1 Pengujian enkoder HT12E
Sebelum dilakukan pengujian terhadap modul TLP434A perlu dilakukan pengujian terlebih dahulu pada blok enkoder HT12E. Hal ini perlu dilakukan untuk menghindari adanya kesalahan dalam pengiriman data.
Pengujian blok ini adalah dengan cara memberi masukan data pada pin AD8, AD9, AD10, AD11 pada HT12E.
Data masukan dapat berupa tegangan sebesar 0,8VDD
8
Gambar 20 Rangkaian blok penerima
3.3.1 RLP434A
Setelah data pancarkan oleh TLP434A, data mengalami transmisi kemudian untuk memperoleh data tersebut digunakan rangkaian penerima. RLP434A merupakan pasangan TLP434A yang dapat digunakan untuk menerima data yang dikirim TLP434A dan juga sebagai demodulator digital ASK.
Data diterima oleh antena penerima diteruskan ke RLP434A melewati pin 8 kemudian data yang diterima diproses oleh RLP434A dan didemodulasikan sehingga diperoleh data digital yang selanjutnya akan dikirimkan ke HT12D untuk proses pendekodean data.
Keluaran RLP434A ini dapat berupa data digital ataupun linier, namun pada aplikasi ini yang dibutuhkan adalah keluaran data digital. Konfigurasi pin RLP434A ditunjukkan Gambar 21.
Pin 1 : pertanahan
Pin 2 : keluaran data digital Pin 3 : keluaran linier Pin 4 : vcc
Pin 5 : vcc 1234 5678 Pin 6 : pertanahan
Pin 7 : pertanahan Pin 8 : antena
Gambar 21 RLP434A
Data keluaran dari RLP434A tersebut kemudian dikirim ke dekoder 12 bit HT12D yang pada akhirnya diperoleh keluaran data paralel 4 bit yang sebelumnya dilatch oleh HT12D. selain itu data validasi / dari pin VT di HT12D yang mengisyaratkan bahwa data yang diterima sesuai dengan data yang sebelumnya telah dikodekan oleh HT12E.
3.3.2 Dekoder 12 bit HT12D
HT12D merupakan dekoder yang merupakan seri CMOS LSIs yang dapat dimanfaatkan untuk sistem kendali jarak jauh. HT12D dapat mendekodekan informasi 12 bit yang berisi 8 bit sebagai bit alamat dan 4 bit sebagai bit data.
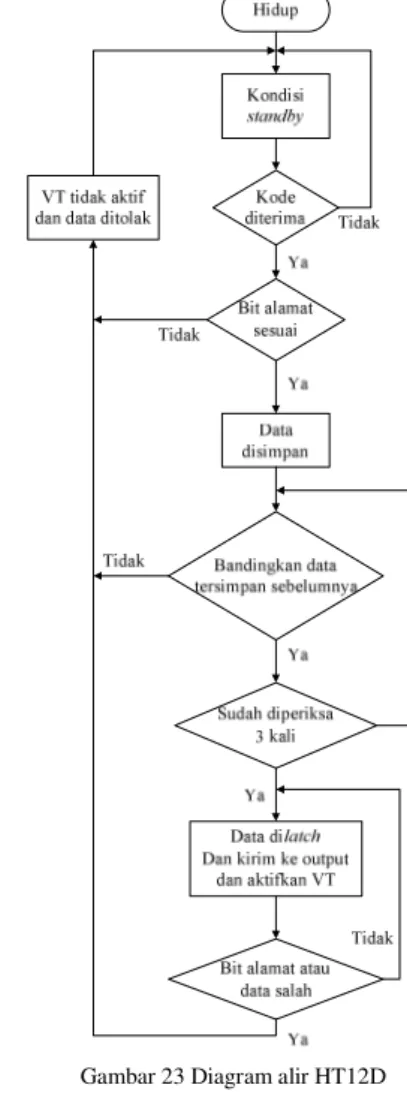
Pada penerimaan dekoder mengisyaratkan 8 bit pertama sebagai bit alamat dan 4 bit selanjutnya sebagai bit data. Sinyal dari pin DIN mengaktifkan oscillator pada saat mendekodekan bit alamat dan bit data yang diterima. Dekoder akan meninjau bit alamat yang diterima 3 kali berturut-turut. Jika kode bit alamat telah sama dengan bit alamat HT12D, bit data didekodekan,
kemudian pin VT pada kondisi high dan hal ini berarti data yang diterima sudah tepat.
Gambar 22 Blok Diagram HT12D
Jika kode bit alamat tidak sama, maka kondisi keluaran tetap sama seperti halnya keluaran sebelumnya, kemudian HT12D siap menerima data berikutnya dari RLP434A, kemudian meninjau lagi bit alamat 3 kali berturut - turut. Data yang baru ditandai dengan adanya sinyal sinkronisasi, sehingga apabila diterima runtutan data dengan sinyal sinkronisasi yang baru dari sebelumnya maka data tersebut merupakan data baru yang siap diolah dan dikodekan HT12D.
Berikut ini diagram alir dari proses yang terjadi dalam HT12D :
Gambar 23 Diagram alir HT12D
Bit data yang keluar dari pin Dout sebelumnya telah dilatch terlebih dahulu sehingga pada keluaran data
3.2.1 Enkoder 12 bit HT12E
HT12E mengkodekan informasi yang berisi 8 bit alamat dan 4 bit data. Setiap alamat atau data masukan diatur dalam kondisi salah satu dari dua kondisi logika (0 atau 1). Pada saat TE aktif low maka enkoder ini memulai dengan mentransmisikan sekumpulan 4 word secara berulang. Peredaran ini akan berulang terus selama TE terjaga pada kondisi low
Berikut ini timing diagram transmisi HT12E seperti pada Gambar 11.
Gambar 15 Timing diagram transmisi HT12E
Gambar 16 Bentuk gelombang bit data/alamat HT12E
Gambar 16 menunjukkan bentuk gelombang bit alamat atau data dengan tiap kondisi “1” atau “0”
memiliki periode gelombang 3 kali dari periode fosc.
Status bit alamat atau data dapat diatur high atau low.
Jika TE aktif low enkoder akan memindai dan kemudian mentransmisikan keadaan dari 12 bit dari bit alamat dan data secara serial. Pada saat pengiriman informasi, bit-bit ini ditransmisikan dengan didahului bit untuk sinkronisasi. Jika Te aktif high maka HT12E berada pada kondisi standby dengan mengkonsumsi arus kurang dari 1 µA untuk supply sebesar 5 V.
Diagram alir HT12E adalah sebagai berikut :
Gambar 17 Diagram alir HT12E
3.2.2 TLP434A
Setelah data dikodekan oleh HT12E, data dikirim ke TLP434A melalui pin 2 dari TLP434A.
Konfigurasi pin TLP434A ditunjukkan pada Gambar 18.
Pin 1 : pertanahan Pin 2 : masukan data Pin 3 : vcc
1 2 3 4 Pin 4 : antena
Gambar 18 TLP434A
Data yang dikirim HT12E ke TLP434A kemudian dimodulasi ASK dan dipancarkan dengan daya pancar 14 dBm atau 25,12 mW. Hal ini dapat dilihat dari kurva di bawah ini yang merupakan kurva hubungan antara tegangan, arus dan daya pancar TLP434A. Karena Vdd yang digunakan adalah 5 V, maka daya pancarnya adalah sekitar 25 mW. Diagram alir Pemancar
Mulai
Data dari komputer
Dikodekan HT12E
Dimodulasi ASK oleh TLP434A
Dipancarkan TLP434A
Diarahkan antena
Ada perubahan data dari komputer?
Tetap mengirim data sebelumnya
Ya
Tidak
Gambar 19 Diagram alir pemancar
3.3 Penerima
Sistem penerima yang digunakan pada Tugas Akhir ini merupakan perpaduan antara HT12D sebagai dekoder dan modul RLP434A sebagai penerima dan demodulator ASK (Amplitude Shift Keying). Rangkaian blok penerima dapat dilihat pada Gambar 20.
6
Tabel 1 Pembagian frekuensi
III PERANCANGAN ALAT
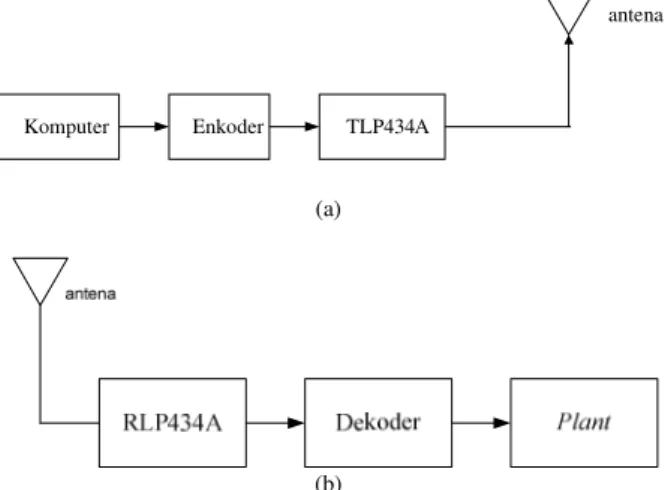
Sistem Nirkabel yang digunakan terdiri dari 2 bagian utama, yaitu : Modul pemancar ASK dan modul Penerima ASK. Modul pemancar ASK terdiri dari 3 bagian utama, yaitu : enkoder dan TLP434A sebagai modulator sekaligus pemancar ASK dengan frekuensi 434 MHz. Modul penerima ASK terdiri dari dekoder dan RLP434A sebagai demodulator sekaligus penerima ASK 434 MHz. adapun diagram untuk sistem nirkabel ini ditunjukan oleh Gambar 3.1
Komputer Enkoder TLP434A
antena
(a)
(b)
Gambar 13 Blok Diagram Sistem Nirkabel (a).Bagian Pemancar (b).Bagian Penerima
3.1 Komputer
3.1.1 Pengenalan Ucapan
Perancangan program pengenalan ucapan sebagai pengaktif peralatan elektronik ini menggunakan bahasa pemrograman Matlab 7.01. Program ini diawali dengan perekaman dan penyimpanan basisdata terlebih dahulu. Basisdata utama sendiri terdiri dari dua buah basisdata yaitu basisdata angka dan basisdata perintah.
Perekaman basisdata utama dilakukan dengan bantuan program Cool Edit Pro 2, untuk perekaman basisdata alat dilakukan dengan menggunakan perintah matlab 7.01 secara langsung.
Parameter – parameter inilah yang nantinya digunakan untuk membedakan satu kata dengan kata yang lain. Parameter HMM didapatkan melalui lima tahap, yaitu memasukkan runtun observasi hasil dari proses ekstraksi ciri, memilih state, inisialisasi parameter HMM, pelatihan HMM, pelatihan HMM digunakan untuk mendapatkan parameter yang lebih baik, dan
penyimpanan parameter. Setelah itu dilakukan runtun observasi, inisialisasi parameter HMM, dan pelatihan parameter HMM. Setelah ucapan dikenali dan diperoleh data, maka data tersebut dikirimkan ke pemancar melewati port paralel.
3.1.2 Proses Pengiriman Data Melewati Port Paralel
Proses pengiriman data dengan menggunakan port paralel yang sebelumnya port paralel tersebut perlu didaftarkan terlebih dahulu. Untuk mendaftarkan port paralel yang sudah tersedia di belakang panel komputer, menggunakan instruksi seperti di bawah ini :
out = daqregister('parallel');
dio = digitalio('parallel','LPT1');
Data Acquisition Toolbox menyediakan akses ke sistem cadangan melalui objek digital I/O. Dengan perintah digitalio membuat objek Matlab yang dapat mewakili sistem digital I/O. Langkah selanjutnya menghubungkan line perangkat keras dengan objek digital I/O. Menambahkan line dengan menggunakan instruksi seperti di bawah ini :
lines = addline(dio,0:7,'out');
Perintah tersebut bertujuan menentukan pin operasi untuk mengirimkan data keluaran pada data pin 0 sampai data pin 7 pada port paralel yang telah terdaftar.
Setelah menentukan pin operasi, selanjutnya pin-pin operasi tersebut diberikan logika 1/0 dengan perintah putvalue, logika 1 dipakai untuk menghidupkan peralatan elektronik dan logika 0 untuk mematikan peralatan elektronik yang terpasang. Senarai program pemberian logika pada tiap pin operasi adalah sebagai berikut:
putvalue(dio,[1 0 0 0 0 0 0 0]);
Setelah itu nilai-nilai tersebut akan disimpan dalam file bernama perintah, pada saat akan menghidupkan atau mematikan perangkat elektronik yang terpasang mengacu pada kondisi pin operasi terakhir yang tersimpan.
3.2 Pemancar
Sistem Pemancar yang digunakan pada Tugas Akhir ini merupakan perpaduan antara HT12E sebagai enkoder dan modul TLP434A sebagai modulator ASK dan pemancar. Data yang diterima dari komputer dikodekan oleh enkoder 12 bit HT12E kemudian dikirim ke TLP434A untuk dimodulasikan secara digital dengan teknik modulasi ASK (Amplitude Shift Keying) kemudian dipancarkan. Rangkaian pemancar yang digunakan adalah sebagai berikut :
Gambar 14 Rangkaian blok Pemancar
Nama Frekuensi Panjang
Gelombang Very Low Frequency VLF < 30 KHz >10 km Low Frequency LF 30 – 3000 KHz 1 – 10 km Medium Frequency MF 300 – 3000 KHz 100 – 1000 km
High Frequency HF 3 – 30 MHz 10 – 100 m
Very High Frequency VHF 30 – 300 MHz 1 – 10 m Ultra High Frequency UHF 300 – 3000 MHz 10 – 100 cm Super High Frequency SHF 3 – 30 GHz 1 – 10 cm Extremely High
Frequency
EHF 30 – 300 GHz 1 – 10 mm
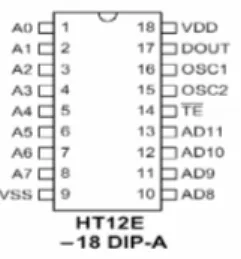
Gambar 10 HT12E-18 DIP-A
HT12E merupakan enkoder yang merupakan seri CMOS LSIs untuk sistem kendali jarak jauh. HT12E dapat mengkodekan informasi yang berisi N jumlah bit alamat dan 12-N bit data. Dalam Tugas Akhir ini digunakan 8 bit sebagai bit alamat dan 4 bit sebagai bit data. Setiap bit alamat atau data masukan dapat diatur dalam kondisi salah satu dari dua kondisi logika. Pada saat TE aktif low, maka enkoder ini memulai dengan mentransmisikan sekumpulan 4 word secara berulang.
Peredaran ini akan berulang terus selama TE terjaga pada kondisi low. Pada saat TE high, enkoder melengkapi kumpulan terakhirnya dan berhenti.
2.6.2 Dekoder 12 bit HT12D
Gambar 11 HT12D-18 DIP-A
HT12D dapat mendekodekan informasi yang berisi N jumlah bit alamat dan 12-N bit data dan dalam Tugas Akhir ini digunakan 8 bit sebagai bit alamat dan 4 bit sebagai bit data.
Pada penerimaan dekoder mengisyaratkan N bit pertama sebagai bit alamat dan 12 – N bit selanjutnya sebagai bit data, dengan N adalah jumlah kode alamat.
Sinyal dari pin DIN mengaktifkan oscillator disaat mendekodekan bit alamat dan bit data yang diterima.
Dekoder akan meninjau bit alamat yang diterima 3 kali berturut-turut. Jika kode bit alamat sama dengan bit alamat HT12D bit data didekodekan kemudian pin VT pada kondisi high dan hal ini berarti data yang diterima valid. Jika tidak sama maka kondisi keluaran tetap sama seperti keluaran sebelumnya lalu menerima data lagi dari RLP434A kemudian meninjau lagi bit alamat 3 kali berturut-turut. Bit data yang keluar dari pin Dout sebelumnya telah dilatch terlebih dahulu sehingga pada keluaran data akan tetap sama hingga data yang baru diterima.
2.7 Transistor[13]
Prinsip kerja transistor adalah arus bias basis - emiter yang kecil mengatur besar arus kolektor - emiter.
Ada tiga cara yang umum untuk memberi arus bias pada transistor, yaitu rangkaian CE (Common Emitter), CC
(Common Collector) dan CB (Common Base). Dengan menganalisa rangkaian CE akan dapat diketahui beberapa parameter penting dan berguna terutama untuk memilih transistor yang tepat untuk aplikasi tertentu.
Rangkaian CE adalah rangkaian yang paling sering digunakan untuk berbagai aplikasi yang mengunakan transistor. Dinamakan rangkaian CE, karena titik ground atau titik tegangan 0 volt dihubungkan pada titik emiter.
Gambar 12 Rangkaian CE 2.7.1 Daerah Aktif dan Daerah Jenuh
Daerah kerja transistor yang normal adalah pada daerah aktif, dimana arus IC konstan terhadap berapapun nilai VCE. Daerah kerja ini biasa juga disebut daerah linear (linear region). Daerah jenuh adalah mulai dari VCE = 0 volt sampai kira - kira 0,7 volt (transistor silikon), dan 0,3 volt (transistor germanium) yaitu akibat dari efek dioda kolektor - base yang mana tegangan VCE belum mencukupi untuk dapat menyebabkan aliran elektron.
2.7.2 Daerah Cut – Off dan Daerah Breakdown Jika kemudian tegangan VCC dinaikkan perlahan - lahan, sampai tegangan VCE tertentu tiba - tiba arus IC mulai konstan. Pada saat perubahan ini, daerah kerja transistor berada pada daerah cut - off yaitu dari keadaan saturasi (OFF) lalu menjadi aktif (ON). Perubahan ini dipakai pada sistem digital yang hanya mengenal angka biner 1 dan 0 yang tidak lain dapat direpresentasikan oleh status transistor OFF dan ON. Transistor mengalami breakdown jika tegangan VCE lebih dari yang ditentukan, arus IC menaik dengan cepat sehingga transistor mengalami dadal.
2.8 Line Of Sight
Line of sight merupakan suatu cara perpindahan gelombang elektromagnet pada satu garis pandang / garis lurus. Gelombang didifraksikan, dipantulkan, atau diserap oleh rintangan dan tidak dapat berpindah melewati horizon(garis yang memisahkan permukaan bumi dengan langit) atau belakang benda. Sinyal radio, pada frekuensi rendah (di bawah 2 MHz) dapat dipengaruhi oleh transmisi tanah sehingga terjadi difraksi yang besar, yang membiarkan photon untuk mengikuti lekukan tanah sepanjang garis lurus terpantul yang banyak. Jadi mengaktifkan sinyal radio AM yang daerah sekitarnya memiliki derau kecil dapat diterima dengan baik setelah antena pemancar diturunkan di bawah horizon.
4 Fungsi bit akhir adalah menyediakan waktu tunda sebelum karakter yang selanjutnya dapat mulai dikirimkan. Hal ini disebut transmisi asinkron mulai- berhenti. Bit akhir juga dapat membantu dalam pensinkronan kembali.
Pada pentransimian secara sinkron, clock dipulihkan kembali sendiri - sendiri dari aliran data dan tanpa menggunakan bit awal dan bit akhir. Hal ini meningkatkan efisiensi transmisi pada kanal yang tepat, yaitu bit yang dikirim merupakan data yang berguna dan tidak merupakan suatu bingkai karakter. Transmisi asinkron tidak mengirimkan data ketika alat transmisi tidak mengirimkan data, sedangkan pada transmisi sinkron harus mengirimkan karakter “pad” untuk menjaga agar pemancar dan penerima tetap sinkron.
Karakter “pad” yang biasa digunakan adalah karakter
“SYN”, hal ini secara otomatis dilakukan oleh perangkat transmisi.
2.4.3 Karakteristik Sinyal Port Paralel
Port paralel adalah port yang pada umumnya digunakan sebagai port penghubung dengan printer. Port paralel juga dapat digunakan untuk keperluan lain, karena port paralel dapat digunakan untuk data in dan data out. Port PC dan PS hanya beberapa bit yang dapat dimanfaatkan untuk keperluan interfacing. Port DP terdapat delapan bit yang dapat dimanfaatkan. Port PC digunakan untuk baca atau tulis, PS adalah port yang digunakan hanya untuk baca (read only), sedangkan port DP digunakan untuk baca atau tulis. Gambar 7 menunjukkan konfigurasi port paralel DB-25 female yang dapat ditemukan di belakang PC.
Gambar 7 Konfigurasi Port Paralel DB-25 female
2.5 Komunikasi Nirkabel
Komunikasi nirkabel merupakan suatu komunikasi antara beberapa pihak dengan media transmisi tanpa melalui kabel atau kawat. Sinyal informasi (suara, data atau text) ditumpangkan pada gelombang radio untuk disampaikan ke tempat tujuan.
Oleh karena itu, dibutuhkan adanya suatu pemancar dan penerima.
2.5.1 TLP434A
TLP434A merupakan suatu modul pemancar buatan Laipac Technology, Inc. yang di dalamnya terkandung suatu rangkaian modulator digital ASK dan rangkaian pemancar. TLP434A ini memiliki 4 pin antara lain pin untuk ground, pin untuk data masukan, pin untuk Vcc dan pin ke antena. TLP434A biasanya difungsikan pada frekuensi 315 MHz, 418MHz, dan 433,92 MHz dengan tegangan operasi antara 2 VDC hingga 12 VDC.
Berikut gambar dari TLP434A :
Gambar 8 TLP434A
2.5.2 RLP434A
RLP434A merupakan suatu modul buatan Laipac Technology, Inc. yang di dalamnya terkandung suatu rangkaian penerima dan demodulator digital ASK.
RLP434A ini memiliki 8 pin antara lain pin untuk ground, pin data keluaran digital, pin data keluaran linier, pin untuk Vcc dan pin dari antena. RLP434A biasanya difungsikan pada frekuensi 315 MHz, 418 MHz, dan 433,92 MHz dengan tegangan operasi antara 3,3 VDC hingga 6 VDC. Keluaran RLP434A ini dapat berupa data digital ataupun linier, namun yang dibutuhkan keluaran data yang digital. Berikut gambar dari RLP434A :
Gambar 9 RLP434A
Kinerja pada sistem komunikasi banyak ditentukan oleh kemampuan bagian receiver (penerima) dalam mengolah kembali sinyal yang diterima dari transmitter (pengirim). Kemampuan penerima untuk mengolah informasi yang terdapat pada gelombang pembawa akan menentukan kualitas kemampuan sistem komunikasi tersebut. Dari seluruh pesan (dalam hal ini bit atau simbol) yang dikirim pemancar, beberapa bagian diterjemahkan secara benar oleh penerima dan beberapa bagian salah.
Bagian yang salah dalam satu satuan waktu (detik) disebut sebagai persen kesalahan per detik atau lebih dikenal sebagai bit error rate (BER). Besarnya bagian yang salah dari seluruh bit yang diterima disebut sebagai prosen error. Kemungkinan kesalahan yang terjadi dari sejumlah bit yang dikirimkan lebih dikenal sebagai probability of error (ada juga yang menyebut bit error probability ) atau disingkat sebagai Pe. Nilai Pe ini selanjutnya digunakan sebagai salah satu kriteria dari kinerja sistem komunikasi digital. Semakin kecil nilai Pe, maka semakin bagus kinerja yang dimiliki sistem komunikasi tersebut.
2.6 Enkoder dan Dekoder 2.6.1 Enkoder 12 bit HT12E
Gambar 3 Demodulator MASK
Gambar 2 merupakan modulator MASK sedangkan Gambar 3 merupakan demodulator ASK.
2.2 Tapis Pelewat Frekuensi Rendah (Low Pass Filter / LPF) [1]
Dalam telekomunikasi, penyaringan (filtering) sinyal - sinyal diperlukan untuk memisahkan sinyal yang dikehendaki dari sinyal - sinyal yang lain. LPF berfungsi untuk melewatkan frekuensi dibawah frekuensi potong (fc, cut off) dan menahan frekuensi diatas frekuensi potong. Tapis yang sering digunakan adalah tapis aktif, karena memiliki beberapa keunggulan dibandingkan tapis pasif, yaitu: ada penguatan tegangan, impedansi masukan tinggi, tanpa kumparan (L), serta dapat dibebani dengan impedansi rendah.
(a) (b)
Gambar 4 (a) Tapis frekuensi rendah aktif. (b) respon keluaran
Pada frekuensi rendah, kapasitor menjadi hubung buka dan rangkaian bekerja seperti penguat inverting dengan penguatan tegangan
− R
2/ R
1. Jikafrekuensi bertambah, reaktansi kapasitif berkurang sehingga menyebabkan penguatan tegangan turun (drop off). Jika frekuensi mendekati tak terhingga, kapasitor menjadi seperti dihubung singkat dan penguatan tegangan mendekati nol. Gambar 4(b) melukiskan respon keluaran. Sinyal keluaran maksimum pada frekuensi rendah.
2.3 Antena
Dalam suatu sistem radio, gelombang elektromagnet merambat dari pemancar ke penerima melalui ruang bebas, sehingga diperlukan antena pada kedua ujung tersebut untuk keperluan penggandengan (coupling) antara pemancar dan penerima ke hubungan ruang bebas (space link). Pada rangkaian penerima, antena berfungsi untuk menangkap pancaran gelombang elektromagnet yang dihasilkan oleh pemancar. Antena akan beroperasi efektif kalau dimensinya sama dengan panjang gelombang isyarat yang hendak dipancarkan atau diterima, sehingga dalam dunia telekomunikasi tidak dipancarkan sinyal berfrekuensi rendah karena ukuran antena menjadi tidak praktis.
Antena dua kutub ½ gelombang yang direntangkan secara horisontal (dinamai juga antena Hertz) dan antena ¼ gelombang vertikal (dinamai juga antena Marconi). Untuk antena vertikal, daya yang dipancarkan sama kuat ke atau dari segala arah, namun untuk arah ke atau dari perpanjangan kawat antena, pancaran atau penerimaannya adalah nol. Antena horizontal memancarkan atau menerima gelombang tidak sama kuat ke atau dari segala arah, namun untuk ke atau dari arah perpanjangan kawat antena, pancaran atau
penerimannya adalah nol. Pengutuban horisontal (unsur - unsur antenanya sejajar dengan permukaan bumi) sedikit lebih menguntungkan daripada pengutuban vertikal, lebih efektif dalam menghindari derau, karena kebanyakan derau listrik buatan manusia adalah berpolarisasi vertikal.
Oleh karena itu, pengutuban horisontal diterapkan terutama dalam komunikasi jarak jauh, sedangkan pengutuban vertikal digunakan terutama dalam komunikasi jarak dekat.
Panjang antena marconi (antena ¼ λ) adalah f.λ=c . fp... (5) dengan f = frekuensi (Hz)
λ = panjang gelombang (m) fp= faktor pendekatan
c = kecepatan rambat gelombang elektromagnet dalam ruang (3x108m/s)
Antena Vertikal ( tampak atas)
¼ ?
Gambar 5 Pola pancaran antena Marconi [9]
2.4 Komunikasi Data
2.4.1 Tata Cara Komunikasi Data Serial [4][5][6][7]
Komunikasi data secara serial dibagi menjadi dua jenis yaitu secara sinkron dan asinkron. Komunikasi data serial secara sinkron adalah komunikasi serial yang pengiriman datanya berdasarkan detak (clock), yaitu detak dikirimkan bersama - sama dengan data serial.
Komunikasi data serial secara asinkron adalah komunikasi data serial yang pengiriman datanya berdasarkan baudrate sehingga tidak memerlukan sinyal detak untuk sinkronisasi, namun pengiriman data ini harus diawali dengan start bit dan diakhiri dengan stop bit seperti yang tampak pada Gambar 6.
Mark
Space
Bit start
Data 7 bit Bit
paritas Bit stop Satu karakter
Mark
Space
Bit start
Data 7 bit
Bit paritas
Bit stop Contoh : Karakter M = 1011001 (paritas genap)
1 0 1 1 0 0 1 0
Gambar 6 Transmisi serial asinkron [6]
2.4.2 UART (Universal Asynchronous Receiver / Transmitter)
UART adalah suatu bentuk pemancar atau penerima yang tidak sinkron, suatu perangkat yang mentranslasikan data antara bentuk serial dan paralel.
Pada pengiriman asinkron, UART mengirim bit awal, bit data yang panjangnya biasanya dari 5 sampai 8 bit, dan bit akhir (biasanya juga ada bit paritas sebelum bit akhir).
2 II DASAR TEORI
2.1 Modulasi
Modulasi dapat diartikan dengan mengatur atau menyetel. Dalam bidang telekomunikasi, modulasi berarti mengatur suatu parameter dari suatu pembawa (carrier) berfrekuensi tinggi dengan pertolongan sinyal informasi yang berfrekuensi lebih rendah. Modulasi amplitudo juga berarti suatu bentuk modulasi dengan cara memvariasikan amplitudo sinyal pembawa secara proposional berdasarkan frekuensi sinyal masukan, dengan frekuensi sinyal pembawa tetap konstan. Tujuan utama dari proses modulasi adalah untuk mengefisiensikan dimensi antena, karena kebanyakan sinyal - sinyal informasi yang dikirimkan mempunyai orde kilohertz (kHz).
Radiasi elektromagnetis yang efisien menggunakan dimensi antena yang besarnya sama dengan panjang gelombang (λ) dari sinyal yang sedang dipancarkan. Hubungan antara frekuensi (f) dan panjang gelombang (λ) adalah:
f
= c
λ
... (1)Gelombang pembawa selalu berbentuk sinusoida, perubahan antara tegangan dan waktu dari gelombang dapat dinyatakan dengan Persamaan 2.2:
)
max
sin( ω + θ
= Ec t
e
c ... (2)Parameter - parameter yang dapat dimodulasi adalah:
1. Ec maks untuk modulasi amplitudo (AM) 2. fc (atau ωc=2πfc) untuk modulasi frekuensi (FM) 3. θ untuk modulasi fasa (PM)
Pada modulasi amplitudo, proses modulasi dilakukan dengan cara mengubah - ubah amplitudo gelombang pembawa sinusoidal.
Sinyal yang memodulasi ditunjukkan oleh Persamaan 2.3 :
t Em
e
msin ω
c=
max ... (3) 2.1.1 Modulasi ASK (Amplitude Shift Keying)Pada sebuah situasi, sinyal baseband yang ditransmisikan memiliki dua kemungkinan nilai informasi yaitu antara nol (0) dan satu (1). Karena kemungkinan nilai informasinya tersusun dari dua keadaan tersebut, maka selanjutnya sistem ini dikenal dengan ASK biner atau kadang lebih disukai dengan menyebutnya sebagai BASK yang merupakan singkatan dari binary amplitude shift keying.
Bentuk sinyal termodulasi dalam hal ini dapat didekati dengan sebuah persamaan matematik:
v(t) = Vc/2 [1 + mvm(t)]cos(2ωct)... (4) dengan :
v(t) = sinyal termodulasi Vc= amplitudo sinyal pembawa
vm = sinyal pemodulasi yang bernilai 1 atau 0 m = indek modulasi
ωc = 2µfc = frekuensi pembawa dalam nilai radian
Dihasilkan dua bentuk sinyal, dengan nilai vm(t)
= 0 atau 1 untuk mengirimkan nilai informasi biner nol (0) atau satu (1). vm(t) bisa juga bernilai 1 atau –1, sehingga dapat dipertimbangkan sebagai data bipolar ternormalisasi. Indek modulasi (m) dapat bernilai 0< m <
1.
(a)
(b)
(c)
Gambar 1 Bentuk gelombang ASK dengan indek modulasi (a) m = 0 (b) m = ½ (c) m = 1
2.1.2 M - ary ASK
Sistem binary ASK memiliki dua macam amplitudo yang mungkin membawa informasi, yaitu high untuk nilai informasi ‘1’ dan low untuk nilai informasi
‘0’. Hanya satu bit untuk setiap pengiriman sebuah simbol. Untuk meningkatkan laju bit, dapat dilakukan dengan cara mengirimkan lebih dari satu bit untuk setiap simbol yang akan dikirimkan, sehingga tidak perlu memperbesar lebar pita pada sistem komunikasi yang digunakan. Karena tetap menggunakan teknik dasar ASK dan setiap simbol tersusun lebih dari satu bit, teknik ini dikenal sebagai M - ary ASK. Dengan M menyatakan banyaknya kemungkinan amplitudo yang digunakan untuk mewakili setiap informasi yang dikirimkan. Nilai M ini berkaitan dengan jumlah bit/simbol yang dikirimkan.
Gambar 2 Modulator MASK
IMPLEMENTASI SISTEM NIRKABEL MENGUNAKAN TLP434 DAN RLP434 PADA SISTEM PENGAKTIF PERANGKAT ELEKTRONIK
MENGGUNAKAN SUARA
Bambang Sugiyono (L2F 003 488)
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro Semarang, Indonesia
Abstrak – Pengolahan sinyal digital sekarang diaplikasikan pada banyak bidang seperti biomedical, navigasi, telekomunikasi, pengolahan suara dan musik, serta pengolahan video dan gambar. Pengenalan suara dapat diimplementasikan pada sebuah sistem kelistrikan rumah, maka nantinya diharapkan sistem kelistrikan rumah akan lebih mudah.
Dalam Tugas Akhir ini akan dibuat implementasi sistem nirkabel yang diterapkan pada pengolahan suara untuk mengaktifkan sistem kelistrikan rumah. Pada program terdapat identifikasi suara pemilik rumah dan keluarganya yang nantinya disimpan dalam database sebagai data uji. Teknik pengenalan ini sering disebut speech identification. Metode yang akan digunakan dalam pengenalan suara ialah LPC (Linear Predictive Coding) sebagai penghasil vektor ciri. LPC dapat dengan fleksibel dikombinasikan dengan HMM (Hidden Markov Model) yang berfungsi sebagai pembanding pola. Data hasil pengenalan dikodekan HT12E dan ditransmisikan pemancar, kemudian penerima menerima data, HT12D mendekodekan data tersebut. Data yang telah didekodekan berguna sebagai pengaktif suatu plant,misal lampu, radio, kipas angin, dan sebagainya.
Pada pengujian diperoleh bahwa HT12E telah dapat digunakan untuk mengkodekan data dan HT12D mendekodekan data. Pada pengujian, TLP434A telah dapat memodulasi data secara ASK (Amplitude Shift Keying) dan memancarkan data tersebut. RLP434A dapat menerima data tersebut dan mendemodulasikan data yang diterima. Dari pengujian diperoleh jarak komunikasi nirkabel yang dapat dilakukan sejauh 100 m. Pada pengujian, perbedaan bit alamat pada HT12E dan HT12D menyebabkan komunikasi tidak dapat dilakukan.
I PENDAHULUAN
Pengenalan suara telah menjadi suatu penelitian yang dilakukan di beberapa Laboratorium Suara di berbagai negara. Contoh nyata dari pendapat tersebut ialah telah ditemukannya banyak metode yang dipakai sebagai sarana pendekatan pemroses suara saat ini.
Beberapa metode yang banyak dipakai dapat dibagi menjadi dua kelompok besar, yaitu Metode Analisis Spektrum dan Pencocokkan Pola[1]. Dua kelompok besar tersebut masih terbagi ke dalam beberapa metode. Dalam analisis spektrum terdapat metode Fast Fourier Transform (FFT), Cepstral Analysis, dan Linear Predictive Coding (LPC). Sedangkan pada metode pencocokan pola dikenal Dynamic Time Warp (DTW) dan Hidden Markov Model (HMM).
1.1 Latar Belakang
Saat ingin menyalakan kipas atau peralatan elektronik rumah tangga lainnya, seseorang yang dalam keadaan yang letih akan merasa membutuhkan orang lain untuk mengerjakannya. Salah satu solusinya adalah pengenalan suara yang diimplementasikan untuk mengaktifkan peralatan elektronik rumah tangga.
Pengenalan suara digunakan metode Hidden Markov Model (HMM) dengan ekstraksi ciri Linear Predictive Coding (LPC). HT12E sebagai enkoder dan HT12D
sebagai dekoder. TLP434A memodulasi data dari enkoder HT12E dan memancarkan data termodulasi.
RLP434 sebagai penerima dan pendemodulasi ASK, kemudian dari RLP434A data dikirimkan ke HT12D. Data dari HT12D digunakan relay sebagai kondisi untuk mengaktifkan atau mematikan peralatan.
Sehingga diharapkan suatu saat dapat mempermudah pengoperasian sistem kelistrikan rumah, misalkan untuk menyalakan lampu, kipas angin, radio, dan sebagainya.
1.2 Tujuan
Tujuan dalam Tugas Akhir ini adalah mengimplementasikan sistem nirkabel dengan TLP434 dan RLP434 yang digunakan dalam pengaktifan sistem kelistrikan rumah dengan deteksi suara.
1.3 Pembatasan Masalah
Dalam Tugas Akhir ini ada beberapa pembatasan masalah sebagai berikut :
1. Penelitian terlepas dari kondisi berderau.
2. Tidak membahas tentang pengenalan suara.
3. Pensinyalan TLP434 tidak dapat diketahui karena frekuensinya tinggi.
4. Menggunakan komunikasi paralel untuk antar muka dengan komputer.