3
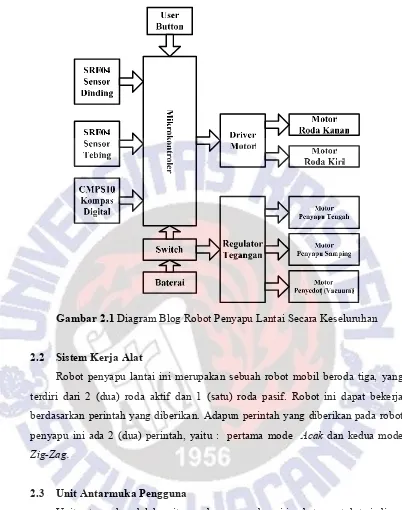
Bab ini menjelaskan gambaran keseluruhan dari robot penyapu lantai yang akan dibuat seperti ditunjukkan Gambar 2.1. Secara fisik, robot penyapu lantai ini terdiri dari bagian mekanik dan elektronik. Bagian mekanik berfungsi sebagai bodi dari robot penyapu lantai dan tangki penampung dari debu. Sedangkan bagian elektronik yang terdiri dari motor-motor DC, mikrokontroler, user button, penampil LCD dan sensor-sensor, berfungsi mengatur pergerakan dari robot penyapu lantai agar dapat bergerak sesuai dengan mode-mode yang di inginkan.
2.1 Gambaran Alat
Robot Penyapu lantai ini dirancang untuk menyapu lantai pada permukaan datar kering, seperti lantai keramik dan lantai kayu.
Sistem dari rancangan agar robot mampu menghindari halangan dan tebing di sekitarnya yang terdiri dari beberapa bagian utama yaitu:
1. Input berupa sensor ultrasonik yang berfungsi untuk mendeteksi kondisi di sekitar robot apakah terdapat objek halangan dan tebing atau tidak yang akan menjadi umpan balik sistem.
2. Input berupa kompas digital yang berfungsi mendeteksi kondisi apakah robot berjalan dengan benar.
3. Pengendalian dari keseluruhan sistem menggunakan mikrokontroler ATmega 32a yang diprogram sesuai dengan informasi masukan dari sensor untuk diolah dan kemudian mengambil keputusan untuk pergerakan pada driver motor DC.
Gambar 2.1 Diagram Blog Robot Penyapu Lantai Secara Keseluruhan
2.2 Sistem Kerja Alat
Robot penyapu lantai ini merupakan sebuah robot mobil beroda tiga, yang terdiri dari 2 (dua) roda aktif dan 1 (satu) roda pasif. Robot ini dapat bekerja berdasarkan perintah yang diberikan. Adapun perintah yang diberikan pada robot penyapu ini ada 2 (dua) perintah, yaitu : pertama mode Acak dan kedua mode Zig-Zag.
2.3 Unit Antarmuka Pengguna
Unit antarmuka adalah unit yang berperan sebagai jembatan untuk terjadinya interaksi antara pengguna dan alat. Alat ini menggunakan push button, 4 switch, port LCD, Port pengisian baterai dan port ISP .
Gambar 2.2 Push Button Pada Robot Penyapu Lantai
Terdapat 3 (tiga) switch yang berfungsi sebagai pengaktif sensor ultrasonik, mikrokontroler dan power utama robot. Seperti yang ditunjukkan pada Gambar 2.4.
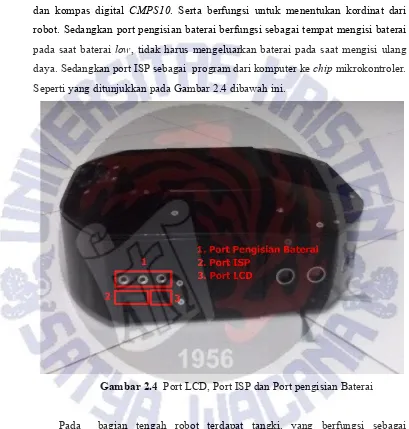
Pada samping kanan robot terdapat Port pengisian baterai, port LCD dan port ISP. Port LCD digunakan untuk menentukan jarak sensor ultrasonik SRF04 dan kompas digital CMPS10. Serta berfungsi untuk menentukan kordinat dari robot. Sedangkan port pengisian baterai berfungsi sebagai tempat mengisi baterai pada saat baterai low, tidak harus mengeluarkan baterai pada saat mengisi ulang daya. Sedangkan port ISP sebagai program dari komputer ke chip mikrokontroler. Seperti yang ditunjukkan pada Gambar 2.4 dibawah ini.
Gambar 2.4 Port LCD, Port ISP dan Port pengisian Baterai
2.4 Unit Pemroses
Unit pemroses adalah unit yang bertugas untuk mengolah data yang masuk menjadi data keluaran yang dikehendaki oleh pengguna. Alat ini menggunakan mikrokontroler ATmega32a sebagai unit pemroses. Berikut adalah spesifikasi dari ATmega 32 :
1. 32kbytes Program Memory 2. 1024 Bytes EEPROM 3. 2kbytes internal SRAM 4. Tegangan operasi 2.7-5.5volt
5. Dapat dioperasikan dengan frekuensi: 0-16MHz 6. 32 I/O yang dapat diprogram secara terpisah 7. 9 sumber interupt
8. Dilengkapi dengan tiga sumber Timer/Counter dengan satu buah lebar data 16bit dan 2 buah lebar data 8bit.
2.5 Komponen Pembentuk Sistem
Untuk merancang dan merealisasikan robot penyapu lantai sistem mempunyai beberapa komponen yang memiliki fungsi masing-masing.
1. Mikrokontroler.
2. Push Button
3. Sensor ultrasonik (SFR04). 4. Driver Motor.
5. LED high power. 6. Sapu samping. 7. Sapu tengah.
8. Kompas Digital (CMPS10). 9. Tangki sampah.