Rosari Saleh dan Sutarto Pada gambar diatas, John Myung, salah seorang personel group
musik progressif terkenal, Dream Theater, sedang beraksi dengan permainan bassnya yang sangat lincah. Nada yang dihasilkan dari petikan senar bass yang berpadu dengan alunan gitar, drum dan keyboard sangat enak didengar. Itulah musik, dimana perpaduan dan kombinasi nada-nada berbeda menghasilkan bunyi-bunyian yang menarik. Seperti telah kita ketahui bahwa bunyi yang dihasilkan oleh alat-alat musik seperti gitar berasal dari senar yang dipetik. Petikan pada senar menyebabkan senar bergetar dan getaran tersebut menghasilkan bunyi. Senar tersebut memiliki ukuran dan tegangan yang berbeda-beda dan setiap senar menghasilkan nada yang berbeda dari senar lainnya.
Bunyi berhubungan erat dengan getaran atau osilasi. Senar yang bergetar menghasilkan bunyi yang khas yang membedakan dengan bunyi seruling yang ditiup atau biola yang digesek. Pada seruling, bunyi dihasilkan dari getaran udara yang terdapat pada kolom udara pada seruling sedangkan pada biola bunyi dihasilkan dari senar yang digesek. Bunyi muncul dalam berbagai bentuk, demikian juga dengan getaran. Benda yang begetar melakukan gerak yang bersifat berulang-ulang dimana setiap perberulang-ulangan (siklus) selalu dimulai dari satu titik dan berakhir pada titik tersebut.
Bab yang akan dipelajari:
1. Osilai dan Gerak Harmonik Sederhana 2. Energi dalam Gerak Harmonik Sederhana 3. Bandul Sederhana
4. Osilasi Teredam
Tujuan Pembelajaran:
1. Mendefisinikan osilasi dalam besaran amplitude, periode, frekuensi dan frekuensi sudut
2. Menganalisa gerak harmonik sederhana dengan menggunakan konsep energi
3. Mengaplikasikan ide gerak harmonik sederhana pada situasi fisis yang berbeda
4. Menganalisis gerak bandul sederhana 5. Mendefinisikan sifat-sifat gerak bandul fisis 6. Menganalisa faktor yang mempengaruhi
osilasi teredam
7. Menentukan pengaruh gaya paksa pada osilator yang menyebabkan resonansi
13 – 1 Osilasi dan Gerak Harmonik Sederhana
Seperti telah kita ketahui bahwa setiap benda yang bergetar memiliki ciri khas masing-masing antara lain, yang paling fundamental, periode yang menyatakan selang waktu yang digunakan untuk melakukan satu siklus. Jika getaran tersebut menghasilkan bunyi maka ciri khas getaran tersebut termanifestasi dalam jenis dan bentuk bunyi yang dihasilkan. Gerak bergetar disebut juga gerak periodik karena gerak tersebut dilakukan secara berulang-ulang dimana setiap perulangan membutuhkan waktu atau periode yang relatif sama. Gerak periodik banyak kita temui dalam kehidupan sehari-hari misalnya gerak periodik ayunan, gerak bandul jam, bahkan detak jantung. Salah satu gerak periodik yang paling sederhana adalah gerak periodik sebuah benda yang disambungkan dengan pegas.
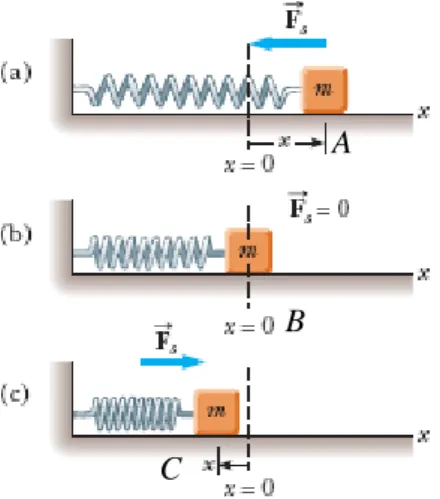
Perhatikan Gambar 13.1, pegas dapat melakukan gerak periodik dengan cara ditarik (gambar no. 2) dan ditekan (gambar no. 3). Jika gaya tekan dan gaya tarik sama besar maka pola gerak periodik yang dihasilkan oleh kedua cara tersebut akan sama, yang berbeda adalah keadaan awal saat kedua pegas tersebut mulai bergetar. Sebuah beban diikatkan pada ujung pegas sedangkan ujung pegas yang lain diikatkan di dinding. Pada keadaan setimbang, pegas tidak melakukan gaya apapun terhadap benda. Jika pegas tersebut ditarik sejauh x ke kanan maka setelah tarikan tersebut dilepaskan pegas akan bergerak ke kiri, seperti terlihat pada Gambar 13.2.
Menarik pegas berarti memberikan gaya terhadap pegas tersebut. Pegas memberikan reaksi berupa gaya yang besarnya sama dengan gaya yang bekerja padanya namun dalam arah yang berlawanan. Berdasarkan hasil eksperimen yang telah dilakukan para ilmuwan, besarnya gaya yang dihasilkan pegas ini adalah:
kx
Fs =− (13–1)
k merupakan sebuah konstanta yang menunjukkan tingkat keelastikan
suatu pegas. Semakin besar nilai k maka semakin sulit untuk meregangkan atau menarik pegas tersebut. k disebut juga konstanta pegas.
Konsep mengenai interaksi gaya yang terjadi pada pegas ini pertama kali dicetuskan oleh Robert Hooke pada tahun 1678 dan hingga saat ini dikenal dengan nama hukum Hooke. Tanda negatif (–) pada persamaan (13–1) menunjukkan bahwa gaya yang dihasilkan oleh pegas selalu berlawanan arah dengan perpindahan beban. Beban yang berpindah ini tentu saja disebabkan oleh adanya gaya eksternal yang bekerja. Gaya tersebut merupakan jenis gaya tarikan yang menyebabkan pegas teregang. Perpindahan beban m searah dengan arah gaya eksternal tersebut.
Gambar 13.2 Gerak periodik pada pegas yang diberi beban m.
A
B
C
Gambar 13.1 Sebuah pegas diregangkan dan dirapatkan.
Lihat Gambar 13.2a, ketika beban m ditarik ke kanan (positif), perpindahan beban m, maka gaya yang dihasilkan oleh pegas FGs
memiliki arah ke kiri dan dengan demikian nilai FGs adalah negatif.
Ketika beban m bergerak ke kiri dan telah mencapai jarak sejauh x maka arah gaya Fs
G
adalah ke kanan. Jika diperhatikan dengan seksama arah gaya Fs
G
selalu menuju ke titik kesetimbangan yaitu di x = 0. Gaya yang dihasilkan oleh pegas ini disebut dengan gaya
pemulih. Secara umum, gaya pemulih adalah gaya berupa tarikan atau
dorongan yang memiliki arah kerja menuju titik atau posisi kesetimbangan.
Perhatikan kembali Gambar 13.2, pada saat beban m mencapai titik kesetimbangan di x = 0, maka gaya yang dihasilkan oleh pegas adalah nol. Sesuai dengan persamaan (13–1), gaya yang dihasilkan oleh pegas berbanding lurus dengan perpindahan beban, x. Hal ini berarti semakin besar perpindahan x maka semakin besar pula gaya pemulih yang dihasilkan. Hal yang menarik adalah mengapa pada saat beban m mencapai titik kesetimbangan beban m tetap bergerak padahal tidak ada gaya yang bekerja pada sistem pegas – beban. Pada saat beban m ditarik sejauh x, beban m dipercepat oleh gaya pemulih Fs. Karena dipercepat maka kecepatan gerak beban m semakin lama semakin besar dan ketika mencapai titik kesetimbangan kecepatan beban m adalah maksimum. Dengan kata lain, pada saat simpangan beban m
minimum (nol) maka kecpeatan beban m adalah maksimum. Pada saat
mencapai titik kesetimbangan, gaya pemulih yang dihasilkan pegas adalah nol karena pada saat itu pegas tidak mengalami regangan atau tekanan sehingga tidak terjadi simpangan pada pegas atau x = 0. Akibatnya Fs = k− ×0=0. Pada keadaan kesetimbangan ini pula tidak ada gaya yang bekerja pada pegas baik itu gaya yang bersifat mempercepat atau memperlambat gerak beban m. Dengan demikian,
percepatan yang bekerja pada beban m ketika berada pada posisi kesetimbangan adalah minimum atau nol. Lantas, apa yang
menyebabkan beban m tetap bergerak? Beban m bergerak dengan kecepatan tertentu dan ketika mencapai titik kesetimbangan kecepatannya mencapai maksimum, vmaks. Beban m dengan demikian memiliki momentum sebesar mvmaks. Momentum inilah yang menyebabkan beban m tetap bergerak walaupun tidak ada gaya yang mempercepatnya.
Setelah mencapai titik kesetimbangan, sedikit saja beban m menyimpang ke arah kiri, katakanlah sebesar (–x), maka gaya pemulih akan dihasilkan oleh pegas sebesar konstanta pegas k dikalikan besar simpangan (–x) atau
F
s=
−
k
( )
−
x
=
kx
. Seperti yang telah disinggung pada pembahasan sebelumnya, arah gaya pemulih FGskiri, menyimpang ke koordinat x negatif, maka gaya pemulih FGs yang
dihasilkan pegas memiliki arah ke kanan dan bernilai positif. Gaya FGs
ini memperlambat gerak beban m karena arah kerja gaya FGs
berlawanan arah dengan gerak beban m tersebut. Semakin jauh beban
m menyimpang maka semakin besar gaya Fs G
yang dihasilkan oleh pegas dan dengan demikian semakin lambat gerak beban m tersebut. Pada suatu saat tertentu ketika simpangan beban m mencapai maksimum maka beban m tidak akan dapat bergerak lagi, dengan kata lain beban m berhenti. Dengan demikian dapat disimpulkan bahwa pada saat simpangan beban m maksimum, kecepatannya adalah
minimum (nol). Besarnya simpangan maksimum beban m ini sama
dengan simpangan mula-mula yang diberikan pada sistem pegas– beban m sebelum terjadi gerak periodik pegas, lihat Gambar 13.2a. Simpangan maksimum yang dapat dicapai oleh beban m disebut
amplitudo.
Pada saat mencapai simpangan maksimum, yaitu pada titik C, gaya pemulih yang dihasilkan pegas adalah maksimum. Seperti yang telah dijelaskan pada Bab 4, salah satu sifat gaya adalah mempercepat gerak suatu benda. Demikian juga dengan yang terjadi pada gaya pemulih yang bekerja pada beban m ini. Gaya pemulih mempercepat gerak beban m dengan percepatan maksimum menuju ke titik kesetimbangan, di x = 0 atau di titik B. Beban m akan meneruskan gerakannya kembali ke titik kesetimbangan (B) kemudian ke A dan kembali lagi menempuh lintasan A – B – C secara terus menerus. Gerak semacam ini disebut dengan gerak harmonik sederhana. Secara konseptual, gerak harmonik sederhana didefinisikan sebagai gerak
bolak – balik suatu benda melalui titik kesetimbangan dimana gaya yang bekerja pada benda tersebut berbanding lurus dengan perpindahan benda dan arahnya selalu menuju ke titik kesetimbangan
(sesuai dengan hukum Hooke).
Contoh-contoh gerak periodik seperti yang telah disinggung pada awal bab ini, antara lain rotasi bumi dan detak jantung, tidak termasuk dalam kategori gerak harmonik sederhana. Untuk mendeskripsikan gerak rumit semacam itu tidak cukup hanya menggunakan hukum Hooke karena gaya-gaya yang bekerja bisa jadi lebih dari satu macam, misalnya gaya gesek dan jenis gaya non-kenservatif lainnya. Namun secara umum, ada tiga konsep penting yang sebaiknya dikuasai terlebih dahulu sebelum mengkaji gerak periodik baik yang sederhana maupun yang rumit. Tiga konsep dasar itu antara lain periode,
amplitudo, dan frekuensi yang sangat penting untukdiketahui ketika
menganalisa berbagai macam gerak periodik.
Jika persamaan (13–1) kita kaitkan dengan hukum II Newton tentang dinamika gerak maka akan kita dapatkan bahwa percepatan yang dialami oleh benda yang bergerak secara periodik sebanding dengan
rasio konstanta pegas k terhadap massa beban m, seperti pada persamaan berikut ini:
x m k a kx ma F F kx F ma F s s − = − = → = − = =
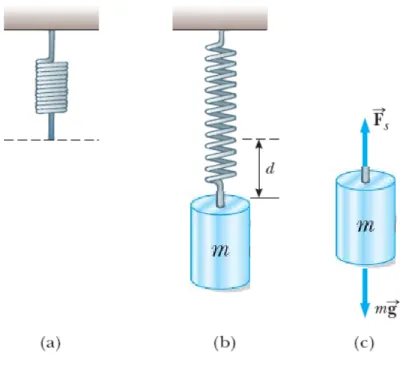
Contoh lain dari gerak harmonik sederhana adalah gerak harmonik pada pegas yang digantung, seperti terlihat pada Gambar 13.3.
Gambar 13.3 Sebuah pegas digantung secara vertikal. Pada gambar 13.3a, pegas berada dalam kondisi kesetimbangan tanpa beban. Ketika sebuah beban yang bermassa m digantungkan pada pegas maka terdapat gaya tarik ke bawah oleh percepatan gravitasi bumi yang bekerja terhadap beban. Pegas mengalami pertambahan panjang sejauh d, lihat gambar 13.3b. Seperti yang telah disampaikan pada pembahasan sebelumnya bahwa ketika terdapat sebuah gaya eksternal yang bekerja pada pegas maka pegas akan menghasilkan gaya pemulih yang besarnya sebanding dengan simpangan pegas.
Pada kasus seperti yang terlihat pada Gambar 13.3, ketika gaya gravitasi bekerja pada beban dan menyebabkan simpangan pada pegas maka pegas menghasilkan gaya pemulih sebesar Fs kd mg
G G G = − = .
Namun karena gaya gravitasi bekerja secara terus menerus terhadap beban maka gaya pemulih yang dihasilkan juga bekerja secara terus
menerus. Gaya gravitasi dan gaya pemulih ini terus menerus ada dan saling mengimbangi satu sama lain sehingga jumlah total gaya yang bekerja pada sistem seperti Gambar 13.3 adalah nol sepanjang waktu atau: setimbang keadaan dalam berada sistem 0→ = − = − kd mg mg kd
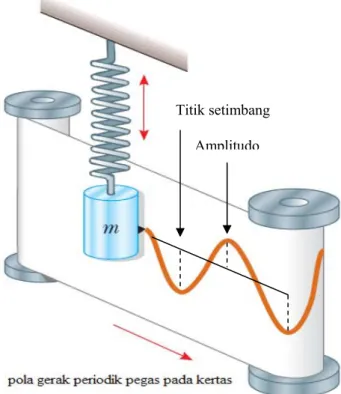
Sistem semacam ini hampir mirip dengan sistem kesetimbangan statik sebuah benda yang digantung dengan sebuah tali dimana gaya gravitasi yang bekerja pada benda diimbangi oleh tegangan tali yang arahnya berlawanan dengan arah kerja gaya gravitasi tersebut. Namun, jika beban yag menggantung pada pegas tersebut ditarik ke bawah kemudian dilepaskan maka pegas akan mulai berosilasi atau melakukan gerak harmonik sederhana. Menarik beban ke bawah berarti memberikan gaya pada sistem pegas–beban yang dapat pula diartikan sebagai memberikan percepatan terhadap beban untuk melakukan gerakan naik turun. Dengan mengabaikan efek disipasi gaya karena gesekan udara dan lain-lain maka gerak osilasi yang terjadi adalah gerak harmonik sederhana yang sesuai dengan hukum Hooke, lihat kembali persamaan (13–1). Pola gerakan naik turun yang dilakukan pegas ini dapat digambarkan dalam bentuk grafik, seperti tampak pada Gambar 13.4.
Gambar 13.4 Pola gerakan periodik pegas naik turun yang digambarkan secara grafik pada kertas. Seperti terlihat pada gambar bahwa pola gerakan yang tergambar pada kertas adalah pola gerakan sinusoidal. Ketika beban bergerak naik maka pada kerta akan tampak grafik naik sedangkan ketika
Amplitudo Titik setimbang
beban turun maka garis yang tergambar pada grafik adalah berarah ke bawah. Amplitudo berkaitan dengan simpangan maksimum yang ditempuh oleh beban. Sedangkan titik setimbang berkaitan dengan posisi beban pada saat simpangan benda nol.
Dengan mengetahui pola gerakan harmonik benda secara grafik, kita bisa mengetahui dengan mudah dimana posisi benda pada saat kecepatan benda tersebut maksimum. Kita juga bisa mengetahui dimana posisi benda pada saat percepatannya maksimum. Bagaimana bentuk persamaan yang merepresentasikan kebergantungan antara posisi, kecepatan, dan percepatan terhadap waktu? Bagaimana juga bentuk persamaan matematik yang menunjukkan kepada kita hubungan antara posisi dengan kecepatan dan percepatan? Untuk mempermudah analisa kita dalam menemukan relasi matematik yang menghubungkan antar variabel pada gerak harmonik sederhana maka kita mulai dengan membandingkan bentuk grafik dari gerak harmonik sederhana dengan grafik gerak melingkar.
Simbol A menunjukkan amplitudo sedangkan x menunjukkan simpangan pada waktu t tertentu. Sumbu utama menyatakan titik kesetimbangan benda dimana simpangan, baik x maupun A, bernilai nol. Pada sumbu utama ini, benda berada pada kondisi kesetimbangan. Dalam tataran konseptual, gerak harmonik sederhana dan gerak melingkar merupakan jenis gerak yang sama. Yang membedakan kedua gerak tersebut adalah cara benda dalam menempuh lintasannya. Pada gerak melingkar, dengan mengacu pada Gambar 13.5, jika kita melihat gerakan benda titik w yang bergerak dengan kelajuan kinier v relatif terhadap sumbu utama maka akan kita dapatkan bahwa benda tersebut akan bergerak dalam pola gerakan yang mirip (bahkan sama) dengan gerak harmonik sederhana, seperti terlihat pada Gambar 13.4. Perhatikan simbol x yang ditunjuk dengan tulisan Simpangan. Ketika sudut θ = 0, titik w berada di p dan dengan demikian simpangan titik
w adalah sama dengan jari-jari lingkaran yaitu A, diukur relatif
terhadap titik pusat lingkaran.
Simpangan pada titik ini, yang sama dengan jari-jari lingkaran, adalah simpangan maksimum atau amplitudo. Dengan semakin bertambahnya sudut θ maka jarak mendatar x diukur relatif terhadap titik pusat lingkaran semakin lama semakin kecil dan ketika θ = 900 jarak mendatar x = 0. Pada titik x = 0 ini benda berada dalam posisi setimbang. Karena benda menempuh lintasan berupa lingkaran maka untuk lebih mempermudah analisa, kita akan mengkonversi besaran kecepatan linier v menjadi kecepatan sudut ω. Dengan menggambar kembali Gambar 13.5, diagram pada Gambar 13.6. Proyeksi pada sumbu x posisi benda w diukur relatif terhadap titik pusat lingkaran menunjukkan kecenderungan pola grafik sinusoidal. Perhatikan
w
Simpanga
Q P
Gambar 13.5 Analogi gerak harmonik sederhana dengan gerak melingkar secara skematik.
Gambar 13.6 Representasi gerak melingkar benda w. Benda w menempuh lintasan berupa lingkaran.
dengan seksama segitiga O–P–Q, jarak x dapat ditentukan dengan menggunakan aturan trigonometri:
θ θ cos cos A x OP x = = (13–3)
Karena benda w bergerak sepanjang waktu maka nilai sudut θ juga berubah seiring dengan perubahan posisi benda w. Seperti yang telah kita pelajari pada bab gerak melingkar, untuk benda yang bergerak melingkar beraturan dengan kecepatan sudut ω maka laju perubahan posisi sudut dapat ditentukan dengan persamaan:
( )
t θ ωtθ = 0+ (13–4)
Dengan θ0 menyatakan posisi sudut awal sebelum benda bergerak. Karena pola gerak melingkar seperti pada Gambar 13.6 menunjukkan gejala yang sama dengan gerak harmonik sederhana maka persamaan (13–3) juga berlaku untuk gerak harmonik sederhana. Jika kita substitusikan persamaan (13–4) ke persamaan (13–3) akan kita peroleh persamaan umum untuk gerak harmonik sederhana:
( )
t A(
t)
x = cos θ0 +ω (13–5)
Yang mana, x (t) menyatakan simpangan benda yang bergerak harmonik sederhana, A menyatakan amplitudo yaitu simpangan maksimum, sedangkan
(
θ
0+
ω
t
)
menyatakan posisi sudut benda pada saat t. Jika posisi sudut awal θ0 = 0, persamaan (13–5) menunjukkan pada kita bahwa benda tersebut memulai geraknya dengan simpangan maksimum. Jika diingat kembali, pada kasus benda yang digantung pada pegas, benda memulai geraknya ketika benda tersebut disimpangkan terlebih dahulu sehingga persamaan (13–5) menjadi logis baik secara konsep maupun kasus riilnya.Dari persamaan (13–5), kita juga dapat menurunkan besaran-besaran lainnya seperti frekuensi dan periode. Waktu yang dibutuhkan benda untuk menempuh satu lingkaran penuh disebut periode, T. Satu lingkaran penuh setara dengan 2π. Jika benda bergerak dengan kecepatan sudut ω maka 2π = ωt. Waktu t yang dibutuhkan untuk
menempuh sudut 2π inilah yang disebut periode T atau dalam ekspresi matematik yang lebih kompak:
ω π 2 =
T (13–6)
Dengan demikian, frekuensi dari gerak benda dapat dengan mudah kita tentukan yaitu:
π ω 2 1 = = f T f (13–7)
Periode diukur dalam satuan sekon (s) sedangkan frekuensi diukur dalam satuan Hertz (Hz). ω sering disebut dengan frekuensi sudut yang memiliki dimensi sama dengan frekuensi. Dengan menggunakan variabel T dan f, persamaan (13–5) dapat dituliskan kembali dalam bentuk:
( )
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = t T A t x cos θ0 2π (13–8)( )
t A(
ft)
x = cosθ0+2π (13–9)Persamaan (13–5), (13–8), dan (13–9) adalah ekuivalen antara satu dengan yang lainnya. Perhatikan bahwa persamaan simpangan benda yang bergerak harmonik sederhana mengandung variabel cosinus dimana variabel tersebut memiliki batas – batas nilai maksimum 1 dan minimum –1. Nilai batas ini mengakibatkan amplitudo A juga memiliki batas maksimum dan minimum yaitu A dan –A. Hal ini berkaitan dengan gerak simpangan benda relatif terhadap titik kesetimbangan. Benda bergerak di dua sisi koordinat yang berbeda dimana jika salah satu sisi kita tentukan sebagai koordinat positif maka sisi yang lain merupakan koordinat negatif. Jika benda bergerak naik turun maka dua sisi koordinat tersebut adalah sebelah atas dan sebelah bawah, diukur relatif terhadap titik kesetimbangan. Jika benda bergerak secara horisontal maka dua sisi koordinat tersebut adalah sebelah kanan dan kiri dari titik kesetimbangan. Setelah kita mengetahui fungsi posisi benda yang bergerak harmonik sederhana terhadap waktu, bagaimana kita menentukan kecepatan dan percepatannya setiap saat?
Dengan mengetahui fungsi posisi suatu benda terhadap waktu maka kecepatan benda dapat kita tentukan dengan mudah. Dengan mengambil turunan pertama dari persamaan (13–5) terhadap waktu maka kita peroleh fungsi kecepatan sebagai berikut:
( )
( )
( )
(
)
( )
t A(
t)
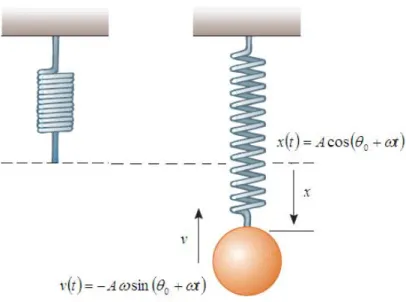
v t A dt t dx dt t dx t v ω θ ω ω θ ω + − = + − = → = 0 0 sin sin (13–10)Gambar 13.7 Benda yang digantung dengan pegas diberi simpangan sejauh
x ke bawah. Arah kecepatan benda ke atas, berlawanan dengan arah
perpindahan benda.
Jika kita bandingkan dengan persamaan (13–5), dengan sangat gamblang kita dapat melihat bahwa arah kecepatan benda berlawanan dengan perpindahannya. Perhatikan Gambar 13.7.
Benda yang digantungkan pada sebuah pegas diberi simpangan sejauh
x. Pegas memberikan menghasilkan gaya pemulih yang mempercepat
gerak benda tersebut. Karena arah gaya pemulih ini selalu menuju titik kesetimbangan maka arah percepatan yang disebabkan oleh gaya pemulih juga menuju ke titik kesetimbangan. Akibatnya gerak benda juga menuju ke titik kesetimbangan yang tentu saja dengan kecepatan yang searah dengan arah gerak benda tersebut. Representasi grafik dari kecepatan benda sebagai fungsi waktu dapat dilihat pada
Gambar 13.8.
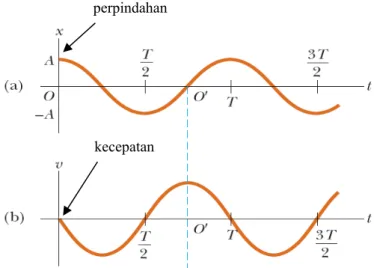
T menunjukkan periode sedangkan A adalah amplitudo. Titik O adalah
titik awal dimana benda mulai bergerak. Pada grafik posisi terhadap waktu, simpangan ditunjukkan pada sumbu vertikal. Pada grafik kecepatan terhadap waktu, kecepatan ditunjukkan pada sumbu vertikal. Pada grafik yang tertera dalam Gambar 13.8 terlihat bahwa ketika simpangan benda maksimum, kecpeatan benda pada saat itu adalah minimum (nol). Tentu saja demikian karena pada saat benda mencapai keadaan maksimum benda tersebut diam dan dengan demikian kecepatan benda adalah nol.
Gambar 13.9 Perbandingan grafik fungsi posisi, kecepatan, dan percepatan. T menunjukkan periode sedangkan A adalah amplitudo. Titik
O adalah titik awal dimana benda
mulai bergerak. Pada grafik posisi terhadap waktu, simpangan ditunjukkan pada sumbu vertikal. Pada grafik kecepatan terhadap waktu, kecepatan ditunjukkan pada sumbu vertikal. Sedangkan pada grafik fungsi percepatan terhadap waktu,
percepatan ditunjukkan pada sumbu vertikal.
Gambar 13.8 Perbandingan grafik fungsi posisi terhadap waktu dengan grafik fungsi kecepatan terhadap waktu.
Seperti halnya kecepatan, untuk menentukan fungsi percepatan terhadap waktu kita ambil turunan pertama fungsi kecepatan sehingga diperoleh:
( )
( )
( )
(
)
( )
t A(
t)
a t A dt t dv dt t dv t a ω θ ω ω θ ω + − = + − = → = 0 2 0 2 cos cosTelah dijelaskan pada pembasahan sebelumnya bahwa arah percepatan ini sesuai dengan arah gerak benda. Pada saat benda mengalami simpangan maksimum, gaya pemulih yang dihasilkan pegas adalah maksimum sehingga percepatan yang dihasilkan juga maksimum. Representasi grafik percepatan dibanding dengan grafik posisi dan kecepatan dapat dilihat pada Gambar 13.9.
Seperti yang telah kita cermati pada pembahasan sebelumnya bahwa baik fungsi simpangan, kecepatan maupun percepatan semuanya mengandung variabel fungsi trigonometri. Perhatikan persamaan (13– 5), (13–10), dan (13–11). Di ruas kanan pada ketiga persamaan tersebut mengandung tiga jenis variabel yang mempengaruhi nilai fungsi di ruas sebelah kiri yaitu amplitudo, frekuensi sudut dan fungsi trigonometri. Dari variabel tersebut kita bisa mengelompokkan menjadi dua jenis yaitu variabel yang besifat konstan dan
berubah-ubah. Amplitudo dan frekuensi sudut merupakan variabel yang
bersifat konstan sedangkan fungsi trigonometri merupakan variabel yang berubah-ubah yang nilainya bergantung pada frekuensi sudut dan waktu. Namun, nilai batas maksimum–minimum dari fungsi trigonometri ini telah kita ketahui yaitu 1 dan –1. Dengan demikian, karena variabel selain fungsi trigonometri adalah konstan, nilai mutlak maksimum dari posisi, kecepatan dan percepatan dicapai saat nilai dari fungsi trigonometri tersebut maksimum. Nilai maksimum dari (13–12) perpindahan
masing-masing kuantitas tersebut dapat kita tentukan dengan amat mudah yaitu:
Nilai maksimum simpangan:
(
)
(
)
( )
( )
A A x x A x t t A x maks maks maks maks = ± × = → ± × = ± = + → + = 1 mutlak nilai 1 1 cos cos θ0 ω θ0 ωNilai maksimum kecepatan:
(
)
(
)
( )
( )
ω ω ω ω θ ω θ ω A A v v A v t t A v maks maks maks maks = ± × − = → ± × − = ± = + → + − = 1 mutlak nilai 1 1 sin sin 0 0Jika dalam persamaan simpangan terdapat amplitudo, maka pada persamaan kecepatan juga terdapat amplitudo. vmaks pada persamaan kecepatan adalah amplitudo dari persamaan tersebut. Persamaan (13– 10) dapat kita tuliskan kembali sebagai berikut:
( )
(
)
ω ω θ A v t v t v maks maks − = + = dengan sin 0Nilai maksimum percepatan:
(
)
(
)
( )
( )
2 2 2 0 0 2 1 mutlak nilai 1 1 cos cos ω ω ω ω θ ω θ ω A A a a A a t t A a maks maks maks maks = ± × − = → ± × − = ± = + → + − =Demikian juga dengan persamaan percepatan, nilai percepatan maksimum menunjukkan amlitudo persamaan tersebut. Dengan analogi yang sama dengan sebelumnya, persamaan (13–11) dapat kita tuliskan kembali sebagai berikut:
( )
(
)
2 0 dengan cos ω ω θ A a t a t a maks maks − = + =Sejauh ini kita telah mendiskusikan tentang persamaan gerak harmonik sederhana dengan menekankan pada analisa kebergantungan besaran-besaran fisis yang terlibat di dalamnya terhadap waktu. Berikut ini kita akan bahas kebergantungan besaran-besaran terutama kecepatan dan percepatan terhadap jarak atau simpangan. Perhatikan
kembali Gambar 13.6, kita dapat menyatakan fungsi kecepatan terhadap simpangan x dengan mensubstitusi variabel trigonometri pada persamaan (13–10) dan (13–11). Pada persamaan (13–10), nilai
sinus dapat kita ganti dengan persamaan sebagai berikut:
A x A x A PQ A PQ 2 2 2 2 sin sin − = − = → = θ θ
Persamaan (13–10) kita tuliskan kembali menjadi:
( )
A2 x2 A v t v maks⎟ − ⎠ ⎞ ⎜ ⎝ ⎛ = (13–12)Untuk mengubah persamaan percepatan ke dalam variabel simpangan
x maka kita harus mengubah variabel cosinus.
( )
x A a A x a t a A x maks maks ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ → = = : peroleh kita (11) persamaan ke cos nilai usikan mensubstit dengan cosθ13 – 2 Energi dalam Gerak Harmonik Sederhana
Pegas memiliki energi potensial yang disebut energi potensial elastik pegas. Ketika dua benda saling berinteraksi satu sama lain maka akan terjadi transfer energi antar benda tersebut. Sebuah benda yang disambungkan dengan pegas, ketika pegas di tekan atau diregangkan maka energi potensial pegas, setelah regangan atau tekanan dilepas, akan ditransfer ke benda dalam bentuk energi kinetik yang menyebabkan benda tersebut bergerak. Energi potensial pegas dihasilkan dari gaya pemulih yang besarnya bergantung pada simpangan pegas tersebut. Hal ini berarti gaya pemulih bukanlah kuantitas yang konstan melainkan selalu berubah-ubah dan nilainya bergantung pada, terutama, simpangan. Gaya yang bekerja pada suatu benda dan menyebabkan benda tersebut berpindah dalam jarak tertentu menghasilkan suatu kerja. Demikian juga pegas. Gaya pemulih yang bekerja pada benda menghasilkan suatu kerja dimana kerja tersebut sama dengan energi yang dihasilkan oleh pega. Energi potensial pegas dapat dihitung sebagai berikut:
Gaya yang dihasilkan oleh pegas F
( )
x =−kx( )
(
)
⎥⎦⎤ ⎢⎣ ⎡− − − = − − → − =∫
∫
2 0 2 0 0 0 2 1 0 0 x x k EP EP kxdx EP dx x F EP EP pegas x x x x pegasDengan EP0 adalah energi potensial pegas pada titik kesetimbangan, yaitu di x0 = 0. Biasanya, pada titik kesetimbangan diasumsikan bahwa energi potensial pegas bernilai nol sehingga EP0 dan 02
2
1
kx
bernilai nol, dan oleh karenanya:
(
)
2 2 2 0 2 0 2 1 0 2 1 0 2 1 kx kx x x k EP EPpegas = − + = ⎥⎦ ⎤ ⎢⎣ ⎡− − − =Energi kinetik hasil transformasi dari energi potensial adalah: 2
2 1
mv
EK = (13–15)
Agar persamaan (13–14) dan (13–15) lebih aplikatif, maka kita akan mensubstitusikan persamaan simpangan x (t) dan persamaan v (t) masing-masing ke persamaan (13–14) dan (13–15) sehingga kita peroleh persamaan berikut:
(
)
[
]
(
t)
kA t A k EPpegas ω θ ω θ + = + = 0 2 2 2 0 cos 2 1 cos 2 1 (13–16)(
)
[
]
(
t)
mA t A m EK ω θ ω ω θ ω + = + − = 0 2 2 2 2 0 sin 2 1 sin 2 1 (13–17)Persamaan (13–16) dan (13–17) adalah persamaan umum untuk energi potensial pegas dan energi kinetik gerak harmonik sederhana. Energi total yang dihasilkan pada sistem tersebut adalah EM = EPpegas + EK. Dalam bentuk yang lebih eksplisit kita peroleh:
(
t)
mA(
t)
kA EK EP EM = pegas + = 2 2 θ0 +ω + 2ω2sin2 θ0 +ω 2 1 cos 2 1 (13–18) Mari kita tengok sejenak persamaan (13–2) yaitu:0 2 2 2 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + → − = − = x m k dt x d x m k dt x d x m k a
Persamaan (13–2) sebenarnya juga merupakan persamaan yang merepresentasikan gerak harmonik sederhana. Bandingkan solusi persamaan (13–2) tersebut dengan persamaan percepatan sudut, persamaan (13–11).
( )
t
A
(
t
)
a
=
−
ω
2cos
θ
0+
ω
Percepatan adalah turunan kedua dari fungsi simpangan x (t) atau 2
2
dt x d
sehingga persamaan (13–11) dapat dituliskan kembali dalam bentuk:
(
t)
A dt x d a dt x d ω θ ω + − = = 0 2 2 2 2 2 cosDengan mensubstitusikan persamaan 22
dt x
d ke persamaan (13–2) dan
juga mengganti x dengan fungsi eksplisit posisi maka diperoleh:
(
)
(
)
m k m k t A m k t A ± = = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − = + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + − ω ω ω θ ω θ ω 0 0 cos cos 2 0 0 2Dengan mensubstitusikan persamaan (13–19) ke persamaan (13–18) kita peroleh persamaan untuk energi total sistem sebagai berikut:
(
)
(
t)
m k mA t kA EM = 2 2 θ0+ω + 2 sin2 θ0 +ω 2 1 cos 2 1(
)
(
)
[
]
[
(
)
(
)
]
2 0 2 0 2 0 2 0 2 2 2 1 1 sin cos sin cos 2 1 kA t t t t kA EM = = + + + → + + + = θ ω θ ω θ ω θ ω (13–19) (13–20)13 – 3 Bandul Sederhana
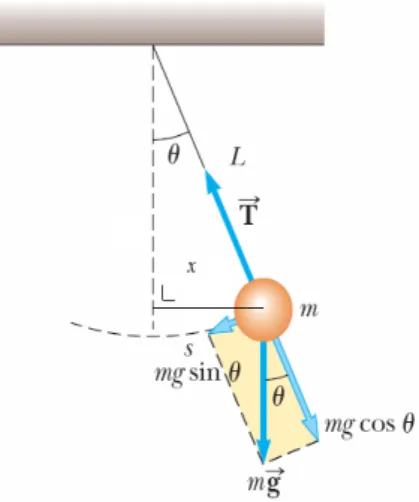
Gambar 13.10 Sebuah bandul sederhana, sering disebut juga sebagai
bandul matematis, terdiri dari sebuah bola bermassa m yang diikat dengan sebuah tali yang memiliki panjang L. Ketika bandul disimpangkan sejauh θ, bandul akan bergerak ke kiri dan ke kanan dengan periode tertentu. Simpangan yang diberikan pada bandul menyebabkan gaya-gaya total yang bekerja pada bandul menghasilkan gaya balik sehingga bandul tersebut bergerak secara periodik. Gaya balik ini mirip dengan gaya pemulih pada pegas.
Sistem-sistem yang memiliki cara kerja mirip dengan bandul seperti pada gambar di atas sering kita jumpai dalam kehidupan sehari-hari seperti ayunan anak-anak, bandul jam, dan lain sebagainya. Ketika bandul disimpangkan dengan sudut tertentu maka setelah dilepaskan bandul akan bergerak secara periodik. Dalam konteks bab yang kita pelajari ini, pertanyaan yang perlu untuk diajukan adalah apakah gerak periodik bandul itu termasuk dalam gerak harmonik sederhana? Untuk menjawab pertanyaan tersebut, kita harus mengingat kembali konsep dasar tentang gerak harmonik sederhana. Hal pokok yang harus diperhatikan adalah dinamika gaya yang muncul dalam sistem tersebut haruslah mematuhi persamaan Hooke,
F
s=
−
kx
. PerhatikanGambar 13.10, ketika bandul digeser ke kanan (pergeseran pada
sudut θ positif), maka gaya-gaya yang bekerja pada bandul terurai menjadi beberapa komponen. Akan menjadi lebih jelas jika kita bandingkan dengan keadaan bandul pada saat bandul belum disimpangkan, seperti terlihat pada gambar 13.11 dimana komponen gaya yang bekerja hanya gaya gravitasi dan tegangan tali saja. Pada keadaan seperti ini, bandul berada dalam keadaan setimbang karena total gaya yang bekerja pada bandul saling menghilangkan baik pada komponen vertikal maupun komponen horisontal.
Gambar 13.11 Sebelum disimpangkan, bandul berada dalam keadaan
setimbang. Gaya yang bekerja pada bandul antara lain gaya gravitasi dan gaya tegang tali. Pada keadaan seperti ini bandul tidak mengalami pergerakan jika tidak diberi gaya atau pengaruh dari luar.
Tentu kita masih ingat dengan kasus pegas yang digantung dimana ketika pegas hanya sekedar ”digantung” maka perilaku pegas tersebut sama dengan perilaku bandul pada Gambar 13.11. Namun ketika pegas diberi gaya dari luar berupa tarikan dan kemudian pegas dilepaskan, pegas mengalami gerakan periodik. Pada saat itu, saat pegas dilepaskan, pegas menghasilkan gaya pemulih yang besarnya sebanding dengan simpangan yang diberikan pada pegas. Gaya inilah yang menyebabkan pegas bergerak naik turun secara periodik. Pada saat bandul diberi simpangan, bandul bergerak bolak balik, ke kiri dan ke kanan. Bandul ini dapat bergerak karena memiliki gaya balik Gambar 13.10 Bandul sederhana.
Gambar 13.11 Keadaan bandul sebeum disimpangkan.
seperti halnya pegas. Untuk kemudahan penyebutan dan generalisasi konsep, gaya balik ini kita sebut saja sebagai gaya pemulih.
Kita perhatikan kembali Gambar 13.10, konfigurasi gaya pada saat bandul diberi simpangan menunjukkan bahwa gaya gravitasi terproyeksi ke dalam dua sumbu koordinat dengan sumbu acuan vertikal arah kerja tegangan tali. Gaya tegang tali diimbangi oleh proyeksi gaya gravitasi mgcosθ sedangkan proyeksi gaya gravitasi
mgsinθ merupakan gaya yang dihasilkan dari penyimpangan bandul.
Gaya mgsinθ ini memilki arah menuju titik kesetimbangan dan yang menyebabkan percepatan pada bandul sehingga bandul bergerak secara periodik. Jika diperhatikan, gaya ini bergantung pada sudut simpangan θ. Semakin besar sudut simpangan θ maka semakin besar pula gaya pemulih yang dihasilkan. Dalam keadaan ideal dimana massa tali diabaikan, gesekan dengan udara juga diabaikan dan mengasumsikan bandul sebagai partikel titik, maka ketika bandul diberi simpangan sebesar θ, bandul tersebut akan dibalikkan pada arah yang berlawanan dengan besar sudut θ pula. Namun demikian, dalam keadaan semacam ini, kita tidak dapat mengaplikasikan hukum Hooke untuk merumuskan gaya pemulih yang dihasilkan bandul dan dengan demikian gerak bandul tersebut, walaupun bersifat periodik, bukanlah gerak harmonik sederhana. Gerak harmonik sederhana mensyaratkan bahwa kebergantungan gaya pemulih terhadap simpangan adalah linier, seperti tertera pada persamaan (13–1). Pada bandul kita ini, kebergantungan gaya pemulih terhadap simpangan adalah bersifat trigonometrik, Fs = mg sin θ. Dengan mengasumsikan perpindahan bandul bernilai (+), maka jika persamaan gaya pemulih pada bandul kita uraikan, akan kita peroleh persamaan berikut:
⎟
⎠
⎞
⎜
⎝
⎛
−
=
=
→
−
=
L
x
mg
F
L
x
mg
F
s ssin
θ
sin
θ
Gambar 13.12 Diagram gaya pada bandul yang diayun.
Gambar 13.13 Analogi osilasi bandul dengan gerak pegas.
Agar gerak periodik bandul tersebut termasuk dalam gerak harmonik sederhana maka perpindahan s haruslah linier. Dengan kata lain, kita harus membuat simpangan bandul tersebut sekecil mungkin.
Sebelum kita melangkah ke asumsi berikutnya, kita akan membandingkan bagaimana pola gerak yang terjadi pada pegas dan bandul. Seperti terlihat pada gambar di samping, ketika bandul disimpangkan sejauh θmaks, keadaan ini sama dengan ketika sebuah pegas disimpangkan sejauh xmaks (A). Seperti halnya pegas, ketika bandul disimpangkan pada simpangan maksimum, percepatan bandul juga maksimum dan seterusnya.
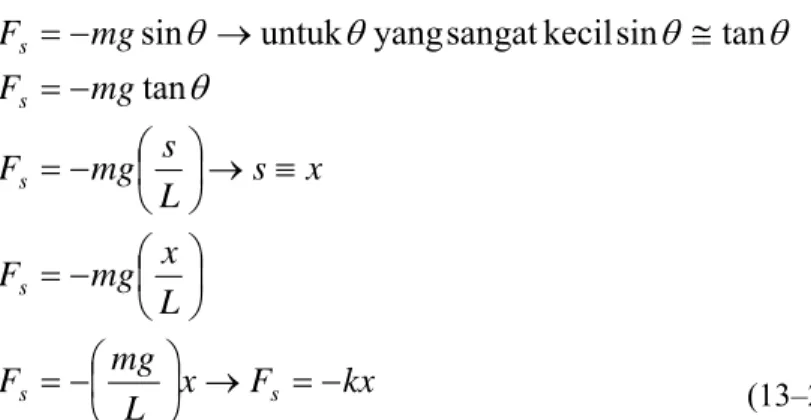
Pada saat sudut simpangan bandul kita buat sekecil mungkin maka kita dapat menggunakan nilai pendekatan sinus ≅ tangen. Untuk sudut yang sangat kecil, nilai tangen θ ≅
.
L
x
Perhatikan bahwa jika nilai sudut θ ini sangat kecil, maka nilai x ≅ s dan dengan demikian pergerakan bandul adalah linier.
Gambar 13.14 Ilustrasi gerak harmonik sederhana dengan sudut simpangan sangat kecil yang menyebabkan perpindahan bandul mendekati linier. Pada keadaan seperti ini, kita dapat menggunakan
pendekatan hukum Hooke untuk mendeskripsikan gerak harmonik bandul tersebut. θ θ x x L m
kx F x L mg F L x mg F x s L s mg F mg F mg F s s s s s s − = → ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ≡ → ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − = ≅ → − =
θ
θ
θ
θ
θ
tan tan sin kecil sangat yang untuk sin g L T L g f L g L mg m L mg k m kπ
π
ω
ω
2 2 1 1 = = = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = → =Pada situasi semacam ini, gaya pemulih pegas dapat dituliskan kembali menjadi:
(13–21) Pada persamaan (13–21), untuk sistem bandul sederhana, nilai mg dan
L dapat kita asumsikan konstan. Jika dianalogikan dengan persamaan
Hooke untuk pegas maka kita variabel
⎟
⎠
⎞
⎜
⎝
⎛
L
mg
sebanding dengan konstanta pegas k. Kebergantungan gaya pemulih pada bandul adalah linier terhadap perpindahan bandul yaitu x. Dengan demikian, persyaratan untuk disebut sebagai gerak periodik yang bersifat harmonis sederhana telah terpenuhi. Persamaan Hooke untuk bandulsederhana adalah
⎟
⎠
⎞
⎜
⎝
⎛
=
→
⎟
⎠
⎞
⎜
⎝
⎛
−
=
L
mg
k
x
L
mg
F
s . Denganmenggunakan anlogi pada persamaan (19), frekuensi dan periode gerak bandul dapat kita tentukan dengan persamaan berikut:
Hal yang sangat menarik yang kita temukan pada persamaan periode dan frekuensi gerak bandul adalah bahwa kedua besaran tersebut tidak bergantung pada massa bandul melainkan hanya panjang tali dan percepatan gravitasi. Sifat gerak semacam ini diterapkan dalam berbagai bidang antara lain pengukuran percepatan gravitasi di suatu tempat, pembuatan jam, dan observasi kandungan mineral di bawah tanah.
Kata ”bandul” telah sangat akrab dengan telinga kita. Demikian juga dengan persepsi yang terbentuk dalam benak kita setelah mendengar
Gambar 13.15 Sebuah benda tegar digantung pada salah satu ujungnya yaitu di titik O. Benda kemudian di simpangkan sejauh θ dari titik setimbangnya.
kata ”bandul”, secara langsung terasosiasi dengan sebuah sistem yang terdiri dari tali dan beban yang digantung dimana sistem tersebut dapat melakukan gerak bolak-balik secara periodik terhadap titik kesetimbangannya. Untuk membuat sistem yang memiliki perilaku semacam itu, tidaklah harus selalu berwujud ”bandul”. Sebatang kayu panjang yang digantung salah satu ujungnya dapat juga melakukan gerak bolak-balik secara periodik. Demikian juga dengan benda-benda lain yang, bahkan, memiliki bentuk yang tidak beraturan sekalipun. Tidak seperti pada bandul dimana kita dapat mengabaikan pengaruh massa tali dan bentuk beban yang menggantung padanya, untuk benda-benda tegar sembarang massa benda tidak dapat kita abaikan. Benda sembarang (dalam arti bentuk dan besar massanya dapat bermaca-macam) yang melakukan gerak bolak-balik secara periodik disebut sebagai bandul fisis. Perhatikan Gambar 13.15.
Ketika benda dilepaskan maka benda tersebut akan berosilasi relatif terhadap sumbu putarnya yaitu titik O. Simpangan yang diberikan terhadap benda menyebabkan benda bergeser dari titik kesetimbangannya sehingga momen gaya total benda tidak nol. Relatif terhadap sumbu putar O, gaya gravitasi bumi yang bekerja pada benda menghasilkan momen gaya sebesar τ =mgLsinθ .
Seperti yang telah dibahas pada Bab 10, momen gaya merupakan pemicu dari gerak rotasi sebagaimana halnya gaya F yang memicu gerak translasi pada dinamika gerak Newtonian. Benda pada Gambar
13.15 dapat kita anggap sebagai sistem yang bergerak melingkar atau
berotasi dengan pusat rotasi di O. Persamaan gerak untuk benda tersebut adalah:
α τ =I
∑
(13–22)Dengan I adalah momen inersia sedangkan α adalah percepatan sudut rotasi benda. Relatif terhadap sumbu rotasi, persamaan (13–22) dapat kita uraikan menjadi:
2 2 2 2 sin sin dt d I mgL dt d I mgL θ θ θ α α θ = − = → = − (13–23)
Tanda negatif pada persamaan (13–23) menceritakan kepada kita bahwa gaya gravitasi bumi yang bekerja pada benda tersebut menghasilkan momen gaya yang melawan arah simpangan yang diberikan pada benda. Dengan kata lain, momen gaya tersebut berperilaku seperti gaya pemulih pada sistem pegas dan bandul matematis. Jika kita berikan simpangan pada benda dengan sudut yang sangat kecil maka kita peroleh nilai dari sin
θ
≅θ
sehingga persamaan (13–23) menjadi:0 sin nilai kecil sangat sudut sin 2 2 2 2 2 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = − ≅ → = − θ θ θ θ θ θ θ θ θ I mgL dt d dt d I mgL dt d I mgL
Terlihat bahwa dengan memberikan sudut simpangan yang sangat kecil dan mengambil asumsi nilai sin
θ
≅θ
kita peroleh persamaan (13–24) yang tidak lain adalah persamaan untuk gerak harmonik sederhana. Solusi umum dari persamaan (13–24) adalah:(
t)
maks φ ω θ
θ = cos + (13–25)
Dari persamaan (13–24), frekuensi dan periode dari gerak bandul fisis antara lain: mgL I T I mgL f I mgL I mgL I mgL π π ω ω ω 2 2 1 2 = = = → ± = = (13–26)
Salah satu aplikasi dari bandul fisis ini adalah menentuka momen inersia suatu benda yang belum diketahui. Dengan mengetahui titik pusat massa benda tersebut maka kita dapat membuat eksperimen sederhana untuk melakukan pengukuran momen inersia. Seperti kita ketahui bahwa persamaan umum untuk menentukan momen inersia benda-benda adalah nMR2 dimana momen inersia berbanding lurus
dengan massa benda, I ∼ m. Dengan demikian satu set persamaan
(13–26) menunjukkan bahwa baik frekuensi dan periode tidak bergantung pada massa benda.
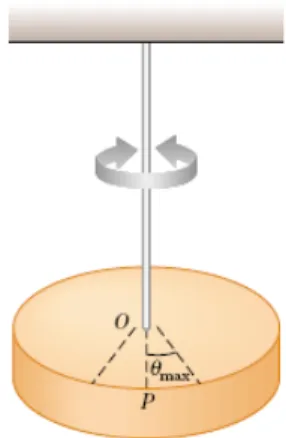
Ada jenis gerak harmonik sederhana lainnya yang disebut dengan ayunan torsional (torsional pendulum), seperti terlihat pada Gambar
13.6. Roda mengalami rotasi kecil di sekitar pusatnya sebesar θmaks dimana garis OP menjadi garis acuan yang digunakan untuk mengukur besar simpangan sudut yang terjadi. Roda berputar, lebih tepatnya bergerak ke kiri dan ke kanan secara periodik, dari sudut θmaks hingga –θmaks.
Ketika roda pejal disimpangkan maka roda akan menghasilkan momen gaya pemulih sebesar
τ
p=
−
κθ
dimana κ (kappa) menyatakan konstanta torsional. Oleh Cavendish, seorang ilmuwan(13–24)
Gambar 13.16 Sebuah kayu berbentuk lingkaran, roda pejal, diikat dengan sebuah tali tepat pada pusat lingkarannya. Roda kemudian diputar (diberi simpangan) relatif terhadap titik pusatnya yaitu sumbu yang segaris dengan tali pengikat roda.
Inggris terkemuka, ayunan torsional digunakan untuk mengukur interaksi gravitasi antara dua benda. Berbeda dengan Gambar 13.16, Cavendish membuat set up seperti berikut ini:
Interaksi gravitasi antara benda bermassa m dan M menghasilkan momen gaya sebesar τT =2rFMm. Pada saat benda M didekatkan,
benda m mengalami simpangan sebesar θ dan pada saat itu keadaan sistem adalah setimbang. Baik benda M dan m berada dalam keadaan diam. Hal ini mengakibatkan gaya torsi akibat gravitasi dan rotasi benda m relatif terhadap kedudukannya semula sama!
Mm T p rF 2 = − = κθ τ τ (13–27)
Persamaan terakhir ini merupakan relasi sederhana dan dapat langsung digunakan untuk menghitung besarnya gaya gravitasi antara benda m dan M. Namun, karena FMm sangat kecil sehingga menjadi kesulitan teknis tersendiri. Hal ini masih diperparah dengan tidak diketahuinya nilai konstanta torsional, κ. Salah satu cara jitu yang diterapkan oleh Cavendish pada sat itu adalah dengan mengukur periode dari gerak rotasi yang dapat dihasilkan dari sistem tersebut yaitu dengan cara menyingkirkan benda M setelah didekatkan pada benda m (menyimpangkan benda m dari kedudukan setimbangnya). Sistem yang kemudian kita jumpai adalah, secara prinsip, sama dengan sistem pada Gambar 13.16. Sebagaimana logika pendekatan yang telah kita terapkan pada kasus bandul fisis, ketika benda M disingkirkan maka benda m, kedua-duanya, akan mengalami gerak rotasi. Gerak ini dipicu oleh momen gaya, gaya pemulih, benda m setelah disimpangkan oleh benda M. Persamaan gerak rotasi sistem dapat kita tuliskan menjadi: 0 2 2 2 2 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = → = − = θ κ θ θ α α κθ α τ I dt d dt d I I p
Lagi-lagi kita memperoleh persamaan gerak harmobik sederhana dimana solusi dari persamaan tersebut sudah familiar dengan kita semua. Persamaan umum gerak ayunan torsional adalah:
(
t)
maks φ ω θ
θ= cos + (13–29)
ω menyatakan frekuensi sudut yang mempunyai bentuk persamaan: (13 – 2 8) Gambar 13.17 Set up eksperimen
(tampak dari atas) yang digunakan Cavendish untuk mengukur interaksi gravitasi antara dua benda. Mula-mula dua benda identik bermassa masing-masing m diletakkan secara horisontal. Dua benda yang lebih besar bermassa M kemudian didekatkan pada setiap benda yang lebih kecil. Benda bermassa m mengalami simpangan dari posisinya semula sejauh θ. Pergeseran ini disebabkan oleh adanya interaksi gravitasi antara benda bermassa m dan M.
κ π κ π κ ω κ ω κ ω I T I f I I I 2 2 1 2 = = = → ± = = (13–30)
Perhatikan kembali Gambar 13.10, versi lain dari ”cara mengayun” bola pada sistem bandul tersebut adalah dengan memutar bola secara horisontal. Sistem semacam itu juga termasuk dalam jenis ayunan yang biasa disebut sebagai ayunan conical. Seperti halnya bandul matematis, frekuensi dan periode dari gerak harmonik yang dihasilkan tidak bergantung pada massa yang digantungkan pada tali. Dengan demikian ayunan conical juga harus diputar pada sudut θ0 yang kecil agar dapat melakukan gerak harmonik sederhana yang memenuhi hukum Hooke.
Ayunan disimpangkan pada sudut θ0 yang sangat kecil sehingga menyebabkan pergeseran linier beban sejauh x dari posisi setimbangnya. Untuk simpangan sudut yang sangat kecil nilai h hampir sama dengan l sehingga pendekatan nilai sin θ0 ≅ θ0 menjadi valid.
13 – 4 Osilasi Teredam
Sejauh ini kita telah mendiskusikan tentang gerak harmonik sederhana dimana kita mengabaikan gaya-gaya non konservatif seperti gaya gesek dan gaya lainnya yang bersifat mereduksi energi total sistem. Gerak harmonik sederhana yang telah kita bahas merupakan jenis gerak dimana energi total sistem selalu konstan dan kebergantungan simpangan bersifat sinusoidal. Dalam kehidupan sehari-hari, sistem ideal semacam itu justru sangat jarang kita jumpai. Kita lebih sering berinteraksi dengan sistem-sistem dimana gaya non konservatif yang bekerja tidak dapat kita abaikan begitu saja. Namun demikian, justru sistem yang mengandung gaya non konservatif inilah yang kita manfaatkan dalam kehidupan sehari-hari.
Gaya hambat yang diakibatkan oleh viskositas cairan ini mirip dengan gaya gesek yang bekerja pada sebuah benda yang bergerak pada permukaan kasar dimana gesekan selalu bekerja pada arah yang berlawanan dengan arah perpindahan benda. Demikian juga pada gerak osilasi, gaya hambat bekerja pada arah yang berlawanan dengan arah perpindahan benda.
Gambar 13.18 Ayunan
conical terdiri dari sebuah
beban bermassa m yang digantungkan pada sebuah tali yang panjangnya l.
Pada kenyataannya tidak ada pegas yang benar-benar ideal. Pegas banyak dimanfaatkan dalam kehidupan sehari-hari misalnya sebagai
shock breaker pada mobil. Anda dapat membayangkan apa yang akan
terjadi seandainya pegas yang digunakan sebagai shock breaker adalah pegas yang berosilasi harmonik sederhana. Ketika Anda naik mobil dan kebetulan melalui sebuah jalan yang terdapat polisi tidur, maka Anda akan terperangah karena mobil Anda terus berosilasi. Hal ini tentu membuat perjalanan Anda tidak nyaman.
Gambar 13.19 menunjukkan sebuah model yang menuntun logika
kita pada pemahaman terhadap mekanisme gerak osilasi teredam. Kita dapat membayangkan sebuah osilasi yang teredam sebagai bentuk osilasi yang makin lama makin lambat dan akhirnya berhenti. Berbeda dengan osilasi harmonik yang terus berosilasi sepanjang waktu, grafik sinusoidal pada gerak osilasi teredam memiliki amplitudo yang semakin lama semakin kecil dan akhirnya nol, seperti tampak pada
Gambar 13.20.
Persamaan gerak osilasi teredam dapat kita turunkan dari persamaan gerak Newton. Secara umum, persamaan geak Newton dapat dituliskan sebagai berikut;
2 2 dt x d m ma F = → ∑ (13–31)
Komponen gaya pada persamaan (13–31) dapat kita uraikan menjadi gaya pemulih dan gaya hambat. Gaya pemulih, seperti yang telah kita pelajari, berbanding lurus dengan simpangan yang secara umum dapat kita tuliskan sebagai:
kx
Fp =− (13–32)
Gaya hambat mereduksi gaya pemulih sehingga percepatan gerak osilasi benda semakin lama semakin kecil. Akibatnya kecepatan gerak benda juga semakin lama semakin kecil. Dengan demikian, gaya hambat proporsional dengan kecepatan gerak benda. Jika gaya hambat kita simbolkan dengan Fh maka:
dt dx b bv
Fh =− →− (13–33)
b adalah koefisien gaya hambat yang memiliki dimensi [MT-1] atau
gaya per kecepatan. Dengan mensubstitusikan persamaan (13–32) dan (13–33) ke persamaan (13–31) kita peroleh:
Gambar 13.19 Sebuah pegas yang diberi beban dicelupkan pada cairan. Ketika pegas berosilasi, cairan mengurangi energi sistem sehingga makin lama osilasi pegas semakin lambat dan akhirnya berhenti.
Gambar 13.20 Grafik osilasi teredam. Amplitudo osilasi semakin lama semakin kecil. Garis titik-titik berwarna biru menunjukkan pola gelombang meluruh (bersifat eksponensial). Pada suatu saat grafik tersebut akan nol yang menandakan bahwa benda tidak lagi berosilasi.
0 2 2 2 2 2 2 = + + = − − → =
∑
kx dt dx b dt x d m dt x d m dt dx b kx dt x d m ma FPersamaan (13–34) merupakan persamaan umum untuk gerak osilasi teredam. Kita juga sudah cukup familiar dengan persamaan tersebut terutama suku pertama dan ketiga dimana setiap ada suku tersebut kita bisa memprediksikan bahw solusi dari persamaan tersebut mengandung faktor sinusoidal atau eksponensial. Misalnya kita ambil solusi persamaan (13–34) sebagai fungsi eksponensial:
t
Ae
x= α (13–35)
Dengan A adalah amplitudo gelombang yang berdimensi panjang. α memiliki dimensi T-1. Dengan turunan biasa, kita tentukan fungsi
dt dx dt x d dan 2 2 sebagai berikut: 0 2 2 2 2 = + + → = = = t t t t t t Ae e A e A e A dt dx e A dt dx Ae x α α α α α α α α α α
Persamaan (13–36) dapat kita selesaikan dengan cara sebagai berikut:
(
m 2+b +k)
=0Aeαt α α
Suku pertama, t
Ae
α , tidak dapat bernilai nol karena jika fungsi tersebut nol maka kita tidak memiliki fungsi persamaan gelombang. Dengan demikian, agar persamaan tersebut dapat diselesaikan maka suku kedua haruslah benilai nol. Suku tersebut hanya persamaan kuadrat biasa, dengan memfaktorkan persamaan tersebut kita peroleh solusi untuk α: m k m b m b ± − − = 22 4 2 α (13–37)Solusi persamaan (13–35) antara lain:
t m k m b m b e A x ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + − = 2 2 4 2 1 1 dan t m k m b m b e A x ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − − = 2 2 4 2 2 2 (34) (13–36) (13–34)
Sehingga: t m k m b m b t m k m b m b e A e A x x x ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + − + = + = 2 2 2 2 4 2 2 4 2 1 2 1 (13–38) Suku m k m b − 2 2
4 dapat bernilai positif, negatif atau nol bergantung pada sistem yang mengalami redaman. Masing-masing nilai memberikan karakteristik osilasi yang terjadi. Untuk nilai
0 4 2 2 〉 − m k m b
, hal ini berarti hambatan yang bekerja sangat besar dan menimbulkan apa yang disebut sebagai dead oscillation. Benda hanya mengalami simpangan sekali kemudian langsung berhenti. Untuk nilai
m k m b − 2 2
4 = 0, benda berada dalam kondisi osilasi teredam kritis. Besarnya gaya hambat dan gaya pemulih adalah sama sehingga apabila salah satu nilai dari gaya tersebut sedikit saja lebih besar dari yang lainnya maka ada dua kemungkinan yaitu jika:
a. m k m b 〉 2 2 4
Dead oscillation, seperti yang telah kita bahas sebelumnya. b. m k m b 〈 2 2 4
Gaya hambat lebih kecil dibanding gaya pemulih sehingga benda mengalami osilasi beberapa saat dan akhirnya berhenti. Pada keadaan ini benda mengalami gerak harmonik sederhana dengan gaya hambat kecil Æ osilasi teredam.
Kondisi yang dipenuhi oleh syarat (b) inilah yang akan kita bahas.
Pada kasus 0 4 2 2 〉 − m k m b dan m k m b − 2 2 4 = 0, benda tidak menunjukkan perilaku gerak harmonik. Karakteristik gerak harmonik sederhana dengan gaya hambat yang kecil ini terepresentasi pada grafik Gambar 13.20. Pada kasus (b), hasil akar pada persamaan
m k m b − 2 2
4 adalah imaginer karena akar bilangan negatif tidak memberikan makna fisis apa-apa. Agar bilangan pada persamaan
m
k
m
b
−
2 24
positif maka ekspresi matematik untuk persamaantersebut kita ubah menjadi:
( )
2 2 2 2 4 1 4 m b m k m k m b − =± − − ±Persamaan (13–38) dapat kita nyatakan kembali menjadi:
t m b m k i m bt t m b m k i m bt e e A e e A x x x ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + = + = 2 2 2 2 4 2 2 4 2 1 2 1 (13–39)
Jika diperhatikan, suku pangkat pada eksponensial memiliki dimensi [T-1], sama dengan dimensi frekuensi sudut ω, sehingga kita bisa mengidentifikasi suku pangkat sebagai frekuensi sudut. Dengan menuliskan 22
4m b
mk − = ω’, maka persamaan (13–39) dapat kita nyatakan kembali sebagai:
(
i t i t)
m bt t i m bt t i m bt e A e A e e e A e e A x x x ' 2 ' 1 2 ' 2 2 ' 2 1 2 1 ω ω ω ω − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + = + = + = (13–40) Dengan menuliskan iφ e i A A 2 0 1= dan e iφ i A A =− − 2 02 yang mana A0 dan
φ
adalah konstanta yang didefinisikan pada saat t = 0. Dengan demikian persamaan (13–40) menjadi:( ) ( )
(
)
(
( ) ( ))
(
)
(
t)
e A x t i e e i e e A e x m bt t i t i t i t i m bt ' sin ' sin 2 2 2 0 ' ' ' ' 0 2 ω φ ω φ ω φ ω φ ω φ ω φ + = + = + → + = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + − + + − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − Dengan menuliskan Ae m A bt = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − 20 maka persamaan umum untuk gerak harmonik teredam adalah:
(
t)
ARepresentasi grafik dari persamaan (13–41) adalah sebagai berikut:
Pada t = 0, amplitudo gelombang adalah maksimum yaitu
0 2 0 0e A A m b = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛−×
. Seiring dengan berjalannya waktu, amplitudo semakin lama semakin mengecil secara eksponensial. Pola gelombang yang muncul tetap menunjukkan pola gelombang harmonik karena terdapat fungsi sinus yaitu sin
(
φ
+ω
't)
. Pada sub bab sebelumnya, energi gerak harmonik sederhana dirumuskan sebagai EM = ½ kA2 dimanaEM ~ A2. Pada gerak harmonik teredam, amplitudo gelombang
tidaklah konstan melainkan meluruh secara eksponensial. Hal ini tentu saja berpengaruh terhadap energi gelombang dimana setiap waktu energi gelombang juga mengalami peluruhan.
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ = = m bt m bt e kA e A k kA E 2 0 2 2 0 2 2 1 2 1 2 1
Pada saat t = 0 kita peroleh EM = ½ kA02. Jika energi pada saat t = 0 ini kita definisikan sebagai E0 maka persamaan umum untuk EM dapat kita tuliskan kembali menjadi:
( )t m b e E E= 02 − (13–42)
Kita lihat pada persamaan (13–42) bahwa tidak hanya amplitudo yang mengalami peluruhan, energi total benda pun juga meluruh seiring bertambahnya waktu.
Amplitudo meluruh secara eksponensial
Pola gelombang sinusoidal
Lampiran Referensi Gambar Bab 13 Gerak Harmonik Sederhana
Gambar Cover Bab 13 Gerak Harmonik Sederhana
Sumber: http://www.dreamtheater.com
Gambar Sumber
Gambar 13.1 Sebuah pegas diregangkan dan
dirapatkan. Crowell, B. 2005. Vibrations and Waves. Free Download at: http://www.lightandmatter.com. Page 15. Gambar 13.2 Gerak periodik pada pegas yang diberi beban m. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 425. Gambar 13.3 Sebuah pegas digantung secara
vertikal. Pada gambar 13.3a, pegas berada dalam kondisi kesetimbangan tanpa beban. Ketika sebuah beban yang bermassa m digantungkan pada pegas maka terdapat gaya tarik ke bawah oleh percepatan gravitasi bumi yang bekerja terhadap beban. Pegas mengalami pertambahan panjang sejauh d, lihat gambar 13.3b. Seperti yang telah disampaikan pada pembahasan sebelumnya bahwa ketika terdapat sebuah gaya eksternal yang bekerja pada pegas maka pegas akan menghasilkan gaya pemulih yang besarnya sebanding dengan simpangan pegas.
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 426.
Gambar 13.4 Pola gerakan periodik pegas
naik turun yang digambarkan secara grafik pada kertas. Seperti terlihat pada gambar bahwa pola gerakan yang tergambar pada kertas adalah pola gerakan sinusoidal. Ketika beban bergerak naik maka pada kerta akan tampak grafik naik sedangkan ketika beban turun maka garis yang tergambar pada grafik adalah berarah ke bawah. Amplitudo berkaitan dengan simpangan maksimum yang ditempuh oleh beban. Sedangkan titik
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 426.
Gambar 13.5 Analogi gerak harmonik sederhana dengan gerak melingkar secara skematik. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 432.
Gambar 13.6 Representasi gerak melingkar
benda w. Benda w menempuh lintasan berupa lingkaran.
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 432.
Gambar 13.7 Benda yang digantung dengan
pegas diberi simpangan sejauh x ke bawah. Arah kecepatan benda ke atas, berlawanan dengan arah perpindahan benda.
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 426.
Gambar 13.8 Perbandingan grafik fungsi
posisi terhadap waktu dengan grafik fungsi kecepatan terhadap waktu.
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 436.
Gambar 13.9 Perbandingan grafik fungsi
posisi, kecepatan, dan percepatan. T menunjukkan periode sedangkan A adalah amplitudo. Titik O adalah titik awal dimana benda mulai bergerak. Pada grafik posisi terhadap waktu, simpangan ditunjukkan pada sumbu vertikal. Pada grafik kecepatan terhadap waktu, kecepatan ditunjukkan pada sumbu vertikal. Sedangkan pada grafik fungsi percepatan terhadap waktu, percepatan ditunjukkan pada sumbu vertikal. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 436. Gambar 13.10 Bandul sederhana. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 438.
Gambar 13.11 Keadaan bandul sebeum
disimpangkan.
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 438.
Gambar 13.12 Diagram gaya pada bandul yang diayun. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 438. Gambar 13.13 Analogi osilasi bandul dengan gerak pegas. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 439. Gambar 13.14 Ilustrasi gerak harmonik sederhana dengan sudut simpangan sangat kecil yang menyebabkan perpindahan bandul mendekati linier. Pada keadaan seperti ini, kita dapat menggunakan pendekatan hukum Hooke untuk mendeskripsikan gerak harmonik bandul tersebut. Dokumentasi Penulis Gambar 13.15 Sebuah benda tegar digantung pada salah satu ujungnya yaitu di titik O. Benda kemudian di simpangkan sejauh θ dari titik setimbangnya. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 440. Gambar 13.16 Sebuah kayu berbentuk lingkaran, roda pejal, diikat dengan sebuah tali tepat pada pusat lingkarannya. Roda kemudian diputar (diberi simpangan) relatif terhadap titik pusatnya yaitu sumbu yang segaris dengan tali pengikat roda. Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher. Page: 406. Gambar 13.17 Set up eksperimen (tampak dari atas) yang digunakan Cavendish untuk mengukur interaksi gravitasi antara dua benda. Mula‐mula dua benda identik bermassa masing‐masing m diletakkan secara horisontal. Dua benda yang lebih besar bermassa M kemudian didekatkan pada setiap benda yang lebih kecil. Benda bermassa m mengalami simpangan dari posisinya semula sejauh θ. Pergeseran ini disebabkan oleh adanya interaksi gravitasi antara benda bermassa m dan M. Huggins, E.R. 2000. Physics 2000. Moose Mountain Digital Press. Etna, New Hampshire 03750. Page: 14–12
panjangnya l. Gambar 13.19 Sebuah pegas yang diberi beban dicelupkan pada cairan. Ketika pegas berosilasi, cairan mengurangi energi sistem sehingga makin lama osilasi pegas semakin lambat dan akhirnya berhenti. Halliday, R., Walker. 2006. Fundamental of Physics, 7th Edition. John‐Willey and Sons, Inc. Page: 409. Gambar 13.20 Grafik osilasi teredam. Amplitudo osilasi semakin lama semakin kecil. Garis titik‐titik berwarna biru menunjukkan pola gelombang meluruh (bersifat eksponensial). Pada suatu saat grafik tersebut akan nol yang menandakan bahwa benda tidak lagi berosilasi. Halliday, R., Walker. 2006. Fundamental of Physics, 7th Edition. John‐Willey and Sons, Inc. Page: 409.
Daftar Pustaka
Serway, R.A and Faughn, J.S., 1999. College Physics, 7th Edition, USA: Harcourt Brace College Publisher.
Dick, Greg, et.al. 2001. Physics 11, 1st Edition. Canada: McGraw-Hill Ryerson. Dick, Greg, et.al. 2001. Physics 12, 1st Edition. Canada: McGraw-Hill Ryerson.
Fishbane, P.M., et.al. 2005. Physics for Scientists and Engineers with Modern Physics, 3rd Edition. New Jersey: Prentice Hall, Inc.
Huggins, E.R. 2000. Physics 2000. Moose Mountain Digital Press. Etna, New Hampshire 03750.
Tipler, P.A. and Mosca, G. Physics For Scientist and Engineers: Extended Version, 5th Edition. W.H. Freeman & Company.
Young, Freedman. 2008. Sears and Zemanky’s University Physics with Modern Physics, 12th Edition. Pearson Education Inc.
Crowell, B. 2005. Vibrations and Waves. Free Download at: http://www.lightandmatter.com.
Crowell, B. 2005. Newtonian Physics. Free Download at: http://www.lightandmatter.com.
Crowell, B. 2005. Conservations Law. Free Download at: http://www.lightandmatter.com.
Halliday, R., Walker. 2006. Fundamental of Physics, 7th Edition. John-Willey and Sons, Inc.
Pain, H.J. 2005. The Physics of Vibrations and Waves, 6th Edition. John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England.
Mason, G.W., Griffen, D.T., Merril, J.J., and Thorne, J.M. 1997. Physical Science Concept, 2nd Edition. Published by Grant W. Mason. Brigham Young University Press.
Cassidy, D., Holton, G., and Rutherford, J. 2002. Understanding Physics, Springer-Verlag New York, Inc.
Serway, R.A. and Jewet, J. 2003. Physics for Scientist and Engineers, 6th Edition. United State of America: Brooks/Cole Publisher Co.