UNTUK MOBIL MAINAN
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Teknik Universitas Sanata Dharma
disusun oleh
M. DIAS ANGGITA P.
NIM : 005114040
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
Presented as Partial Fulfilment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering
M. DIAS ANGGITA P.
005114040
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
yang dikehendaki Allah di
dalam Kristus Yesus bagi
kami”
Ku persembahkan karya
ilmiah ini untuk :
My lord Yesus chirst
Sebab segala sesuatu adalah dari
Dia, oleh Dia dan kepada Dia:
Bagi Dialah kemuliaan sampai
selama lama-lamanya.
My Family:
Bapak, Ibu, mas Wawan, mbak Erna
dan Dina, orang-orang yang selalu
mendukung dan menyayangi saya.
Special for Ina Novita yang
selalu memberi semangat.
Dan Almamaterku
sebagai pengendali, digabungkan dengan teknologi pemancar dan penerima radio maka, pengendalian bisa lebih fleksibel.
Alat ini terdiri dari PC(Komputer), DTMF Generator, Handy Talky pada bagian pemancarnya dan Handy Talky, DTMF Decoder, Digital Combinational Circuits, Motor Driver pada bagian penerimanya. PC mengeluarkan data biner yang merepresentasikan kode pengendalian dan kode pemilihan frekuensi bagi DTMF Generator. Sinyal DTMF ini kemudian dipancarkan dengan Handy Talky. Kemudian sinyal akan ditangkap oleh Handy Talky penerima yang akan diubah kembali oleh DTMF Decoder, yang kemudian akan dimanipulasi oleh Digital Combinational Circuits agar supaya bisa menggerakan motor DC melalui rangkaian Motor Driver.
Sebagai uji coba dilakukan pengontrolan gerakan pada 2 buah motor DC yang terintegrasi dalam bentuk mobil mainan. Hasil akhir alat dapat berjalan berupa pengontrolan gerakan pada mobil mainan yaitu maju, maju belok kanan, maju belok kiri dan mundur, disamping itu juga, ada pengaturan kecepatan full dan middle untuk arah gerak maju, maju belok kanan dan maju belok kiri. Pengontrolan oleh PC dengan mouse yang mengklik tombol, bahasa pemrograman adalah Visual Basic 6.0.
Kata kunci : DTMF, Remote Kontrol, Visual Basic 6.0, antarmuka PC, Motor DC
transmitter and receiver technology, hence operation is more flexible.
This device consist of PC(Computer), DTMF Generator, Handy Talky at part of the transmitter and Handy Talky, DTMF Decoder, Digital Combinational Circuits, Motor Driver at part of the receiver. PC spend binary data which code and operation code representation election of frequency for DTMF Generator. This DTMF signal then transmitted with Handy Talky. Then signal will receive by Handy Talky receiver which will be reconverted by DTMF Decoder, which manipulation will by Digital Combinational Circuits in order trun on motor DC through circuit Motor Driver.
As testing done by controller movement 2 motor DC integrated in the toy’s car. Appliance end result can run in the form of movement controller at toy’s car forward motion, forward-and-turn right, forward-and-turn left and retreated, the side also, there is arrangement of speed full and middle for advance direction of forward motion, forward-and-turn right and forward-and-turn left. Controller by PC with mouse clicking knob, programming language is Visual Basic 6.0.
Key words : DTMF, Remote Control, Visual Basic 6.0, PC interfacing, Motor DC
karena pimpinan dan penyertaan-Nya sehingga penulis dapat meyelesaikan Tugas
Akhir yang berjudul “Remote Kontrol DTMF Untuk Mobil Mainan”. Tugas Akhir
ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik.
Dalam penyusunannya, banyak pihak yang telah membantu dan memberikan
dukungan pada penulis, oleh karena itu, penulis ingin mengucapkan terima kasih
kepada:
1. Bapak Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc., selaku Dekan
Fakultas Teknik Universitas Sanata Dharma, Yogyakarta.
2. Bapak Agustinus Bayu Primawan, S.T., M.Eng
.,
selaku Ketua Jurusan TeknikElektro, Fakultas Teknik, Universitas Sanata Dharma, Yogyakarta.
3. Ibu Wiwien Widyastuti, S.T., M.T., selaku Dosen Pembimbing Akademik.
4. Bapak Martanto, S.T., M.T., selaku Pembimbing I yang bersedia membagikan
ilmu yang dimilikinya dalam membantu proses penyusunan tugas akhir ini.
5. Bapak A. Bayu Primawan, S.T., M.Eng., selaku Pembimbing II yang bersedia
membagikan ilmu yang dimilikinya dalam membantu proses penyusunan
tugas akhir ini.
6. Seluruh staf Dosen Jurusan Teknik Elektro USD yang telah memberikan
banyak pelajaran berharga selama masa kuliah.
7. Pak Djito, Mas Sur, Mas Broto, dan segenap staf serta karyawan Fakultas
Teknik USD, terimakasih atas keramahannya dan pelayanannya.
8. Bapak AL. Sumartono dan Ibu Ag. Sunarni yang selalu mendoakan dan
memberi kasih sayangnya serta dukungan finansial
9. Mas Wawan, Mbak Erna, Dina yang selalu memberi semangat dan doa.
10. Elisabeth Ina Novita terima kasih atas kasih sayangnya dan doanya.
11. Teman-teman seperjuangan di Prodi Teknik Elektro 2000: Puguh-kumis,
Fredi, Joko, Bowo, Danang, Si Bos, Andre, David, Roy, Suryo, Greg. Agung,
Hari poeter, Widi, dll You are the best!
ix
Penulis menyadari bahwa tugas akhir ini masih memiliki banyak
kekurangan. Oleh sebab itu, segala bentuk saran dan kritik yang bersifat
membangun sangat penulis harapkan demi penyempurnaan .
Penulis
xi
HALAMAN PENGESAHAN PEMBIMBING …...……… iii
HALAMAN PENGESAHAN PENGUJI... iv
PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN DAN MOTO... vi
INTISARI ………....………….. vii
ABSTRACT... viii
KATA PENGANTAR... ix
DAFTAR ISI ………...……... xi
DAFTAR GAMBAR ……….. xiv
DAFTAR TABEL …………...……… xvi
DAFTAR LAMPIRAN... xvii
BAB I PENDAHULUAN 1.1. Latar Belakang Masalah... 1
1.2. Perumusan Masalah ... ... 2
1.3. Pembatasan Masalah ... 2
1.4. Tujuan Penelitian ... ... 2
1.5. Manfaat Penelitian ... 3
xii
2.1.1. Superposisi gelombang... 5
2.1.2. Sistem DTMF... 6
2.1.3. IC (Integrated Circuits) DTMF Generator... 7
2.1.4. IC (Integrated Circuits) DTMF Decoder... 9
2.2. Peta Karnaugh... 11
2.3. Motor Driver... 12
2.4. Transistor... 13
2.5. Mengakses Parallel Port... 14
2.6. VB Sebagai Perangkat Lunak Penghasil Data Biner Di PC... 17
2.6.1. Mengenal Visual Basic... 17 2.6.2. Integrated Development Environment (IDE) VB 6...
2.6.3. Object, Property dan event...
2.6.4. Data dan Variabel...
2.6.5. Operator...
BAB III PERANCANGAN
3.1. Diagram Blok rangkaian Remote Cotrol Mobil Mainan...
3.2. Personal Computer (PC)...
3.3. Binary To DTMF Generator...
3.4. Decoder DTMF...
3.5. Digital Combination Circuits...
3.5.1. Pengelompokan Kombinasi Gerakan...
3.5.2. Perancangan Rangkaian Digital...
3.6. Motor DC sebagai penggerak Mobil Mainan (Motor Driver). 17
19
20
22
24
25
25
25
27
28
34
BAB IV PENGAMATAN DAN PEMBAHASAN
4.1. Pengamatan Hasil Akhir Alat yang Telah Dibuat...
4.2. Pengamatan Pada Perangkat Lunak...
4.2.1. Even Pada Program Remote Kontrol...
4.2.2. Deklarasi Port Dan Tunda...
4.3. Pengamatan Pada Rangkaian DTMF...
4.4. Pengamatan Pada Rangkaian Switching Transistor...
4.5. Pengamatan Tegangan Middle...
4.6. Pengamatan Pada Motor Driver...
BAB V KESIMPULAN DAN SARAN
5.1. Kesimpulan...
5.2. Saran... 45
46
46
57
58
61
62
63
67
67
DAFTAR PUSTAKA ...
LAMPIRAN ... 68
69
xiv
Gambar 2.2. IC TP5088N...…...…... 8
Gambar 2.3. IC MT8870D tampak dari atas... 9
Gambar 2.4. Peta-K 2 Masukan...………... 11
Gambar 2.5. Peta-K dengan 4 masukan... 12
Gambar 2.6. Rangkaian CE (Common-Emitter)... 13
Gambar 2.7. Slot DB-25... 14
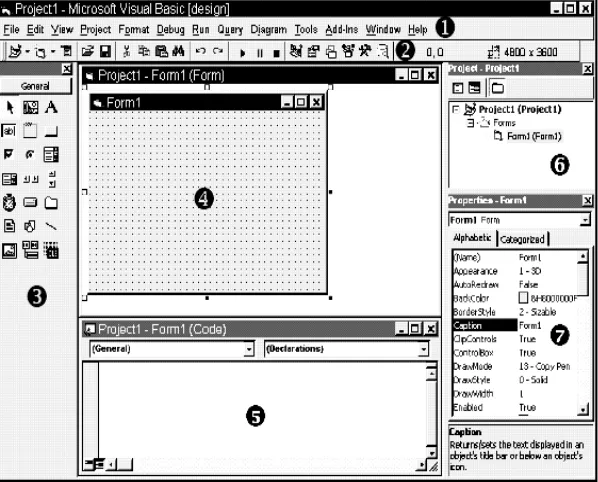
Gambar 2.8. Tampilan IDE Visual Basic 6………...……… 17
Gambar 2.9. Toolbox pada Visual Basic ... 18
Gambar 2.10. Jendela Form... 18
Gambar 2.11. Jendela Code... 19
Gambar 2.12. Jendela Propertis……..…... 19
Gambar 2.13. Ilustrasi objek yang memiliki even, method dan properties... 20
Gambar 3.1. Diagram Blok Remote Kontrol Mobil Mainan... 24
Gambar 3.2. Rangkaian Binary To DTMF Generator... 25
Gambar 3.3. DecoderDTMF menggunakan IC MT8870D... 27
Gambar 3.4. Peta-K gerakan Maju... 29
Gambar 3.5. Rangkaian digital gerakan Maju... 29
Gambar 3.6. Peta-K gerakan Kanan... 30
Gambar 3.7. Rangkaian digital gerakan Kanan... 30
Gambar 3.8. Peta-K gerakan Kiri... 31
Gambar 3.9. Rangkaian digital gerakan Kiri...
Gambar 3.10. Peta-K gerakan Full/Middle...
Gambar 3.11. Rangkaian digital gerakan Full/Middle...
Gambar 3.12. Pet-K gerakan Mundur...
Gambar 3.13. Rangkaian digital gerakan Mundur...
Gambar 3.14. Rangkaian digital kombinasi gerakan...
Gambar 3.15. Rangkaian Motor Driver...
Gambar 3.16. Skema Switching Transistor...
Gambar 3.17. Pembagi Tegangan... 31
32
32
33
33
34
35
37
Gambar 3.22. Flowchart Set Arah...
Gambar 4.1. Foto alat keseluruhan...
Gambar 4.2. Rangkaian-rangkaian di dalam mobil mainan...
Gambar 4.3. Tampilan Awal Program Motor Driver...
Gambar 4.4. Tampilan Saat Mengakhiri Program...
Gambar 4.5. Tampilan Program Saat Maju Middle...
Gambar 4.6. Tampilan Program Saat Maju Full...
Gambar 4.7. Tampilan Program Saat Kanan Middle...
Gambar 4.8. Tampilan Program Saat Kanan Full...
Gambar 4.9. Tampilan Program Saat Kiri Middle...
Gambar 4.10. Tampilan Program Saat Kiri Full...
Gambar 4.11. Tampilan Program Saat Mundur...
Gambar 4.12. Tampilan Program Saat Stop...
Gambar 4.13. Spektrum Frekuensi DTMF Angka 7………
Gambar 4.14 Bentuk sinyal DTMF angka 7……….. 44
45
46
47
48
49
50
51
52
53
54
55
56
58
59
Tabel 2.3. Alamat masing-masing port... 16
Tabel 2.4. Tipe data pada Visual Basic... 21
Tabel 2.5. Operator Aritmatika... 22
Tabel 2.6. Operator perbandingan... 23
Tabel 2.7. Operator logika... 23
Tabel 3.1. Kombinasi gerakan mobil mainan... 28
Tabel 3.2. Tabel kebenaran gerakan Maju... 29
Tabel 3.3. Tabel kebenaran gerakan Kanan... Tabel 3.4. Tabel kebenaran gerakan Kiri... Tabel 3.5. Tabel kebenaran gerakan Full/middle... Tabel 3.6. Tabel kebenaran gerakan Mundur... Tabel 3.7. Properti User Interface... Tabel 4.1. Keadaan awal pada saat program dijalankan... Tabel 4.2. Keadaan saat program maju dijalankan... Tabel 4.3. Keadaan saat program kanan dijalankan... Tabel 4.4. Keadaan saat program kiri dijalanakan... Tabel 4.5. Keadaan saat program mundur dijalankan... Tabel 4.6. Keadaan saat program stop dijalankan... Tabel 4.7. Rata-rata frekuensi hasil pengamatan... Tabel 4.8. Deviasi (%) frekuensi DTMF kode angka 7... Tabel 4.9. Hasil perhitungan dan pengukuran tegangan input saklar transistor. Tabel 4.10. Hasil perhitungan dan pengukuran pada pembagi tegangan... Tabel 4.11. Pengamatan arus pada Motor 1 (M1)... 30 31 32 33 41 47 50 52 54 55 57 59 61 62 62 63 Tabel 4.12. Pengamatan arus pada Motor 2 (M2)... 64
Tabel 4.13. Pengamatan tegangan pada Motor 2 (M2)... 64
Tabel 4.14. Pengamatan arus pada Motor 2 (M2)... 65
Tabel 4.15. Pengamatan tegangan pada Motor 2 (M2)... 65
Lampiran 1. Skematik Rangkaian……….……...L1
Lampiran 2. Gambar Spektrum Frekuensi dan Bentuk Sinyal DTMF …...L2
Lampiran 3.Tabel Rata-rata pengamatan dan tabel deviasi frekuensi DTMF….L3
Lampiran 4. Listing Program Visual Basic………..L4
Lampiran 5. Data sheet Komponen...………L5
Data sheet :
Data sheet IC TP5088N
Data sheet IC MT8870D
Data sheet IC 74LS04
Data sheet IC 74LS11
Data sheet IC 74LS21
Data sheet IC 74LS32
Data sheet IC L293D
Data sheet transistor BC547
Data sheet Relay
Data sheet Motor DC
PENDAHULUAN
1.1. Latar Belakang Masalah
Teknologi elektronika menimbulkan kecenderungan untuk membuat
kegiatan manusia menjadi lebih mudah dan praktis, salah satunya adalah
pengendalian tanpa kabel. Pengendalian tanpa kabel ada beberapa macam antara
lain dengan menggunakan gelombang radio dan cahaya infra merah.
Selama ini masyarakat mengenal alat pengontrol sesuatu dari jarak jauh
dengan menggunakan remote control. Akan tetapi pengontrolan tersebut masih
terhambat oleh jenis remote control, apabila alat yang akan dikontrol dengan
pengontrol itu memiliki sifat bergerak bebas, maka peralatan tersebut tidak dapat
berfungsi sesuai yang diinginkan.
Masyarakat pada umumnya mengenal adanya infra merah yang merupakan
pengendalian dengan pengalihan cahaya. Cahaya infra merah memiliki sifat tidak
dapat menembus materi yang tidak tembus pandang dan juga cahaya dari sumber
(cahaya yang dipancarkan) benar-benar mengenai penerima cahaya tersebut. Oleh
karena itu ruang gerak pengendalian menggunakan cahaya infra merah terbatas.
Berbeda dengan pengendalian dengan pengalih gelombang radio. Pengendalian
bisa dilakukan dari segala sudut ruangan.
Sejalan dengan perkembangan teknologi elektronika tersebut, peranan
motor-motor listrik sebagai penunjang dalam peningkatan produksi dalam suatu
industri semakin besar. Proses pengontrolan motor-motor listrik telah
menghasilkan beberapa metode yang juga berkembang seiring dengan
perkembangan teknologi. Perkembangan dalam bidang pengontrolan motor-motor
listrik tersebut telah menjadi perhatian dan juga menjadi salah satu faktor penentu
bagi efisiensi penggerak secara keseluruhan.
Berbagai macam teknologi tidak kalahnya adalah komputer perkembangan
komputer dengan berbagai macam software dan hardware mampu dan tidak bisa
meningkat sejalan dengan era globalisasi dimana perpindahan dan pergerakan
manusia semakin luas dan cepat. Dari hal tersebut diatas penulis mencoba
memanfaatkan gelombang radio, dan komputer untuk mengontrol motor listrik
dan disamping itu juga penulis mencoba menutupi kekurangan pengendalian yang
dilakukan oleh pengalih cahaya yaitu cahaya infra merah.
1.2. Perumusan Masalah
Berdasarkan latar belakang di atas, maka permasalahan tersebut dapat
dirumuskan sebagai berikut :
1. Bagaimana membuat sistem pengontrolan dari jarak jauh dengan
menggunakan teknologi DTMF (Dual-Tone Mutiple Frequency).
2. Bagaimana membuat program pengontrolan arah putaran motor DC dari
jarak jauh dengan menggunakan bahasa pemrograman.
1.3. Pembatasan Masalah
Pada tugas akhir ini terdapat pembatasan masalah dengan maksud untuk
mempermudah penulisan. Pembatasan masalah itu antara lain :
1. Motor listrik yang dipergunakan dalam penelitian ini adalah motor DC 9V.
2. Membuat aplikasi dari bahasa pemrograman Visual Basic 6.0 untuk
memberikan perintah kepada rangkaian pengendali arah putaran motor DC
melalui parallel port.
3. Nada DTMF ( Dual-Tone Mutiple Frequency) sebagai kode pengendalian
motor DC.
4. Menggunakan modul pemancar dan penerima untuk pengontrolan motor
DC dari jarak jauh.
1.4. Tujuan Penelitian
Tujuan yang hendak dicapai dalam penulisan tugas akhir ini adalah :
1. Membuat program pengontrolan arah putaran motor DC melalui parallel
DTMF (Dual-Tone Mutiple Frequency) dan dengan modul pemancar
penerima.
1.5. Manfaat Penelitian
Manfaat dari penelitian ini diantaranya yaitu:
1. Alat bantu yang kemudian bisa meningkatkan produktifitas dan efisiensi
kerja.
2. Menambah pengetahuan dan wawasan dalam perancangan dan pembuatan
alat kendali jarak jauh dengan memanfaatkan teknologi masa sekarang.
1.6. Metode Penelitian
Dalam penulisan tugas akhir ini, metode penelitian yang digunakan
meliputi :
1. Studi literatur pustaka yang berkaitan dengan masalah DTMF (Dual-Tone
Mutiple Frequency), bahasa pemrograman, dan akses parallel port
2. Membuat rangkaian antar muka pengontrol arah putaran motor.
3. Membuat program untuk mengendalikan motor DC.
4. Ide perancangan yang direalisasikan kedalam rangkaian nyata, diuji, dan
diamati melalui percobaan-percobaan di laboratorium.
1.7. Sistematika Penulisan
Untuk memudahkan memahami permasalahan yang akan dibahas maka
tugas akhir ini disusun dengan sistematika sebagai berikut :
BAB I PENDAHULUAN
Merupakan bab pendahuluan yang membahas tentang latar belakang
masalah, perumusan masalah, pembatasan masalah, tujuan penelitian, manfaat
penelitian dan sistematika penulisan. Melalui bab ini diharapkan dapat diketahui
latar belakang hingga manfaat yang dapat diambil dengan melaksanakan
perancangan yang dibuat.
sehingga dapat mengaplikasikan pengendalian mobil mainan tanpa kabel.
BAB III PERANCANGAN
Berisi tentang perancangan perangkat keras elektronik dan perangkat
lunak sebagai pengendali melalui komputer.
BAB IV PENGAMATAN DAN PEMBAHASAN
Memuat analisis dan pembahasan mengenai hasil penelitian yang telah
dilaksanakan.
BAB V KESIMPULAN DAN SARAN
Berisi tentang kesimpulan dan saran mulai dari pembahasan pada
perancangan, maupun pada pembuatan alat.
BAB II DASAR TEORI
2.1. DTMF (Dual -Tone Multi Frequency) 2.1.1. Superposisi gelombang
Superposisi adalah terjadinya pencampuran 2 gelombang atau lebih yang
menghasilkan gelombang baru yang memiliki karakteristik yang berbeda dari
gelombang – gelombang penyusunnya. Superposisi gelombang terjadi di dalam IC
DTMF generator untuk menghasilkan sinyal DTMF (8). Superposisi yang terjadi
adalah superposisi 2 gelombang yang memiliki amplitudo sama tetapi berbeda
frekuensi, yang mana secara matematis superposisi ini dapat dinyatakan sebagai
berikut;
Apabila gelombang pertama memiliki fungsi sebagai berikut;
t
a 1
1 = sinω
Χ
Dan gelombang ke dua memiliki funsi sebagai berikut;
t
a 2
2 = sinω
Χ
Dimana nilai;
1
2 ω
ω >
Maka akan menghasilkan gelombang baru dengan fungsi sebagai berikut;
(
t t)
a 1 2
2
1+Χ = sinω +sinω
Χ = Χ
(
)
(
)
2 sin 2
cos
2 2 1 t 2 1 t
a ω −ω ω +ω
=
2.1.2. Sistem DTMF
Sistem DTMF (Dual-tone multi Frequency ) adalah sistem nada pada
telepon yang menggunakan prinsip gabungan antara 2 nada dengan frekuensi
berbeda dalam suatu sinyal. Gabungan 2 nada yang berbeda ini mewakili satu
buah digit dari nomor telepon yang terdapat pada keypad pesawat telepon.
Nada-nada ini dikategorikan dalam kelompok baris dan kolom pada keypad tersebut,
sesuai kelompok frekuensi yang rendah dan tinggi, seperti terlihat dalam gambar
2.1. Penggunaan sinyal DTMF dalam saluran telepon harus memenuhi syarat
validasi yang ditetapkan. Sinyal DTMF dinyatakan valid dalam saluran telepon
apabila memenuhi syarat-syarat sebagai berikut :
1. Hanya ada satu nada perkelompok (nada kolom dan nada baris) frekuensi.
2. Perbedaan waktu mulai tiap nada tidak boleh lebih dari 5 ms.
3. Kedua nada minimal berbunyi selama 40 ms.
Gambar 2.1. Susunan Key dan Frekuensi pada Keypad
DTMF memiliki delapan frekuensi, delapan frekuensi tersebut adalah 697
Hz, 770 Hz, 852 Hz, 941 Hz, 1209 Hz, 1336 Hz, 1477 Hz dan 1633 Hz, Angka 1
dikodekan dengan 697 Hz dan 1209 Hz, angka 5 dikodekan dengan 770 Hz dan
1336 Hz, sedangkan angka 9 dikodekan dengan 852 Hz dan 1447 Hz. Kombinasi
dari delapan frekuensi tersebut dapat dipakai untuk mengkodekan 16 tanda.
Tabel 2.1 Pengelompokan frekuensi dan hasil pengkodean
Digit Low Freq High Freq D3 D2 D2 D1
1 697 1209 0 0 0 1
2 697 1336 0 0 1 0
3 697 1477 0 0 1 1
4 770 1209 0 1 0 0
5 770 1336 0 1 0 1
6 770 1447 0 1 1 0
7 852 1209 0 1 1 1
8 852 1336 1 0 0 0
9 852 1477 1 0 0 1
0 941 1336 1 0 1 0
* 941 1209 1 0 1 1
# 941 1477 1 1 0 0
A 697 1633 1 1 0 1
B 770 1633 1 1 1 0
C 852 1633 1 1 1 1
D 941 1633 0 0 0 0
Sinyal DTMF selain digunakan untuk mengadakan hubungan telepon,
dapat juga digunakan sebagai kode pengontrolan. Ini dapat dilakukan karena
sinyal DTMF dapat dikonversi menjadi data digital maupun sebaliknya. Banyak
IC yang telah diproduksi khusus menangani masalah konversi ini. Konversi sinyal
DTMF menjadi data digital dilakukan melalui IC DTMF decoder atau DTMF
receiver. Konversi data digital menjadi sinyal DTMF dilakukan melalui IC DTMF
generator atau DTMF transmitter.
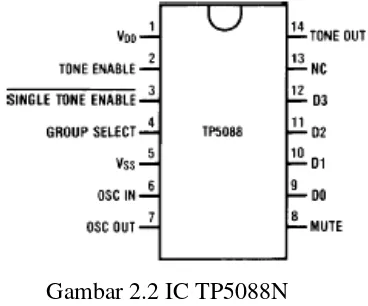
2.1.3. IC (Integrated Circuits) DTMF Generator
Pembangkit sinyal DTMF menggunakan IC TP5088N (DTMF Generator
tone-dialing pada telephone, dengan 4-bit data biner sebagai masukannya. Gambar
2.2 adalah IC TP5088N tampak dari atas :
Gambar 2.2 IC TP5088N
Fungsi dari masing-masing kaki IC TP5088N adalah:
1. Kaki 1 (VDD ) : Masukan sumber tegangan positif. 2. Kaki 5 (VSS) : Masukan sumber tegangan negatif.
3. Kaki 6 dan 7 (OSC IN, OSC OUT) : Pewaktuan pembangkitan tone
diperoleh dari rangkaian osilator ini. Sebuah kristal 3,579545 MHz
dipasang antara kaki 6 dan 7. Osilator tidak aktif ketika TONE ENABLE
(kaki 2) diberi masukan logika rendah.
4. Kaki 2 (TONE ENABLE) : Ketika TONE ENABLE mendapat masukan
berlogika rendah osilator, Tone Generator dan output transistor tidak aktif.
Transisi rendah ketinggi masukan TONE ENABLE membuat data D0 –
D3 terkunci.
5. Kaki 8 (MUTE) : Tidak aktif ketika masukan TONE ENABLE berlogika
tinggi.
6. Kaki 9, 10, 11, 12 (D0, D1, D2, D3) : masukan untuk data biner, dimana data bergantung pada masukan TONE ENABLE.
7. Kaki 14 (TONE OUT) : Keluaran dari tone yang dihasilkan. Merupakan
open emitter dari sebuah transistor NPN, kaki kolektor transistor
terhubung dengan sumber tegangan positif.
8. Kaki 3 (SINGLE TONE ENABLE) : Ketika terhubung dengan VSS atau
sumber tegangan negatif, alat ini berubah menjadi mode dan
kerja, biarkan kaki ini open-circuit atau dihubungkan ke VDD atau sumber tegangan positif.
9. Kaki 4 (GROUP SELECT) : Kaki ini digunakan untuk memilih
tone-group yaitu low tone-group atau high tone-group saat single-mode diaktifkan.
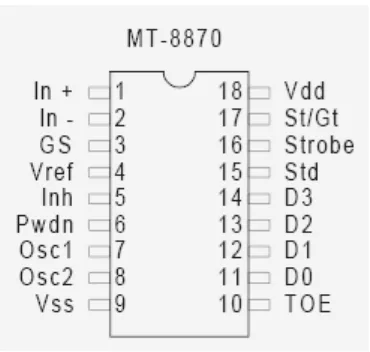
2.1.4. IC (Integrated Circuits) DTMF Decoder
Gambar 2.3 IC MT8870 nampak dari atas
IC MT8870 pada gambar 2.3 merupakan dekoder DTMF, mengartikan
sepasang nada pesinyalan dan memberikan data keluaran sesuai dengan sinyal
DTMF yang diterima. Dekoder DTMF merupakan penerima DTMF yang
mengintegrasikan filter dan fungsi-fungsi dekoder digital. Bagian filter digunakan
untuk memisahkan nada-nada dari kelompok frekuensi tinggi dan rendah.
Dekoder digital mendeteksi dan mengkodekan 16 pasangan nada DTMF ke dalam
bentuk kode biner 4-bit menggunakan teknik penghitung digital. Rangkaian clock
internalnya dilengkapi dengan tambahan osilator kristal. Pemisahan nada
kelompok rendah dan tinggi dilakukan dengan memberikan sinyal DTMF ke input
bandpass filter yang terhubung dengan frekuensi-frekuensi kelompok rendah dan
tinggi. Setiap keluaran filter diikuti oleh sebuah bagian filter untuk memperhalus
sinyal.
Setelah bagian filter, terdapat suatu dekoder yang menjalankan teknik
perhitungan digital untuk menentukan frekuensi dari nada-nada yang masuk dan
mengenali kehadiran dua nada yang sesuai, keluaran Early Steering (ESt) menjadi
keluaran yang aktif. Setiap hilangnya kondisi nada yang terjadi akan
menyebabkan Early Steering (ESt) berada dalam kondisi yang tidak aktif. Apabila
kehadiran dua nada dikenali dan sesuai, maka akan dikonversikan dalam kode
4-bit biner dan dimasukkan dalam latch keluaran. Pada keadaan ini keluaran dari
Guard Time (GT) akan diaktifkan dan tetap tinggi selama ESt juga tinggi. Setelah
penundaan singkat untuk membuat keluaran latch tenang, keluaran Delayed
Steering menjadi tinggi pada penerimaan nada terakhir dan kembali ke logika
rendah saat tegangan St/GT berada dibawah tegangan , memberi isyarat
bahwa nada yang diterima telah diregistrasi.
TSt V
Fungsi dari masing-masing kaki MT8870, adalah:
1. Pin 1 (IN+) : kaki masukan Non-Inverting bagi Op-Amp internal. 2. Pin 2 (IN-) : kaki masukan Inverting bagi Op-Amp internal.
3. Pin 3 (GS) : kaki keluaran Op-Amp internal untuk resistansi umpan balik. 4. Pin 4 (Vref) : Referensi tegangan
5. Pin 5 (INH) : Inhibit logika tinggi sebagai pendeteksi nada untuk karakter A,B,C,D.
6. Pin 6 (PWDN) : Power Down dengan kondisi aktif tinggi.
7. Pin 7 (OSC1) dan Pin (OSC2) : merupakan masukan osilator dan keluaran osilator.
8. Pin 9 (Vss) : masukan sumber tegangan negatif.
9. Pin 10 (TOE) : Three State Enable. Logika tinggi, enable untuk keluaran Q1 sampai Q4.
10. Pin 11 sampai Pin 14 (Q1 sampai Q4) : keluaran hasil pendekodean
isyarat DTMF yang berupa Biner 4-bit.
11. Pin 15 (StD) : Delayed Steering. Keluaran pengendali tundaan yang akan berlogika tinggi pada penerimaan nada terakhir.
12. Pin 16 (ESt) : Early Steering. Akan mengeluarkan logika tinggi jika hanya jika ada nada DTMF yang diterima.
13. Pin 17 (St/GT) : Steering Input Guard Time. Merupakan masukan
14. Pin 18 (VDD) : Merupakan masukan sumber tegangan positif.
2.2. Peta Karnaugh
Sistem logika biasanya melibatkan lebih dari satu gerbang yang
membentuk suatu kombinasi untuk melakukan suatu fungsi tertentu. Salah satu
cara untuk menyederhanakan sistem logika digunakan peta Karnaugh (3).
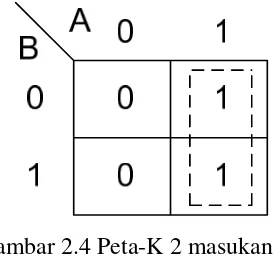
Peta Karnaugh berisi semua kemungkinan kombinasi dari sistem logika.
Kombinasi ini dirangkai ke dalam bentuk tabel. Peta paling sederhana terdiri dari
dua buah masukan A dan B, seperti terlihat pada gambar 2.3. Kolom menyajikan
masukan A, dengan kolom di sebelah kiri menyajikan A = 0 dan kolom sebelah
kanan menyajikan A = 1. Masukan B akan dituliskan pada baris, dengan baris
pertama menunjukkan B = 0, dan baris kedua menunjukkan B = 1. Dari empat
kotak sel yang tersusun akan menyajikan semua kemungkinan nilai masukan,
yaitu 22 = 4 buah masukan. Sebagai contoh ungkapan
(
F =A•B+A•B)
terlihat pada gambar 2.4.
Gambar 2.4 Peta-K 2 masukan
Untuk empat buah masukan, A, B, C dan D, akan terdapat buah
kombinasi yang harus dituliskan ke dalam peta-K. Sebagai contoh suatu ungkapan
dengan 4 buah peubah sebagai berikut :
16 24 =
D ABC ABCD
D C B A D C B A D C B A D C B A
F = + + + + +
Peta-Knya terlihat pada gambar 2.5. Dari gambar tersebut adanya dua
pengelompokan logika 1. Kelompok pertama terdiri dari kelompok kiri atas dan
kelompok kanan atas dengan B dan C tetap pada logika 0, sehingga menghasilkan
sehingga menghasilkan ungkapan ABC. Dengan demikian, ungkapan di atas dapat
disederhanakan menjadi F =BC+ABC.
CD
AB
00
01
10
11
01
10
11
00
1
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
Gambar 2.5 Peta-K dengan 4 masukan
2.3. Motor Driver
Sebagai penggerak digunakan motor dc. Motor dc dipakai secara luas
dalam dunia industri dan aplikasi sehari-hari. Hal ini didukung oleh sifat motor dc
itu sendiri diantaranya murah, kecepatannya konstan dan dapat diatur.
Kekurangannya motor dc tidak dapat dipakai untuk mendapatkan pergerakan yang
presisi, misalnya motor berputar dan berhenti pada titik tertentu (9).
Untuk dapat mengendalikan motor dc dibutuhkan motor driver. Motor
driver menghubungkan antara pengendali dengan motor dc. Kendali posisi ini
menggunakan IC L239D sebagai motor driver. IC L239D memiliki 4 buffer yang
telah dilengkapi dengan dioda. IC L239D dapat mengendalikan empat buah
motor. Buffer 1 dan 2 dikendalikan oleh satu pin enable begitu juga buffer 3 dan
4. Pin enable ini yang menentukan motor berputar atau tidak. Apabila pin enable
diberi logika tinggi dan input diberi logika tinggi maka buffer aktif untuk memutar
motor. Bila pin enable diberi masukan logika rendah maka buffer tidak aktif dan
2.4. Transistor
Transistor berfungsi sebagai saklar bila berada dalam keadaan cut-off atau
saturasi. Rangkaian CE (Common-Emitter) adalah rangkain yang paling sering
digunakan untuk berbagai aplikasi yang mengunakan transistor (gambar 2.6).
Dinamakan rangkaian CE, sebab titik ground dihubungkan pada kaki emitter.
Gambar 2.6 Rangkaian CE (Common-Emitter)
V adalah tegangan jepit antara kaki base dan emitter yang besarnya 0,7 V untuk
bahan silikon. Jika V V maka dapat dianggap kaki base-emitter diberi bias
balik dan arus I = 0, sehingga V = VCC, keadaan transistor yang demikian
disebut cut-off. BE
BB〈 BE
B CE
Tetapi jika VBB〉VBE, akan mengalir arus base (I ) yang besarnya : B
I = B B
BE BB
R V
V −
Keadaan ini membuat transistor dalam keadaan saturasi dan menyebabkan
arus collector (IC) mengalir ke emitter yang besarnya :
IC= C
CE CC
R V
V −
Dalam keadaan saturasi, tegangan VCE ≈0 V. Arus emitter (I ) yang
mengalir adalah :
E
I = I + I E C B
Pada transistor bipolar terjadi penguatan arus dengan faktor penguatan (β atau hFE) sebesar :
B c I
I
=
2.5.Mengakses Parallel Port
Di dalam komputer terdapat beberapa alat komunikasi data yang telah
disediakan, salah satunya adalah parallel port atau lebih dikenal dengan port
printer. Di dalam port printer terbagi atas tiga bagian yang diberi nama sesuai
dengan nama tugas-tugasnya dalam melaksanakan pencetakan pada printer. Tiga
bagian itu adalah Data Port (DP), Printer Control (PC), dan Printer Status (PS).
Data port digunakan untuk mengirimkan data yang harus dicetak oleh printer
(data port tidak bisa dibuat sebagai penerima data, Data Port hanya bisa
mengeluarkan data), Printer Control digunakan untuk mengirimkan kode-kode
kontrol dari komputer ke printer, misalnya kode kontrol untuk menarik kertas,
sedangkan yang terakhir yaitu Printer Status digunakan untuk mengirimkan status
printer ke komputer, misalnya untuk menginformasikan bahwa kertas telah habis.
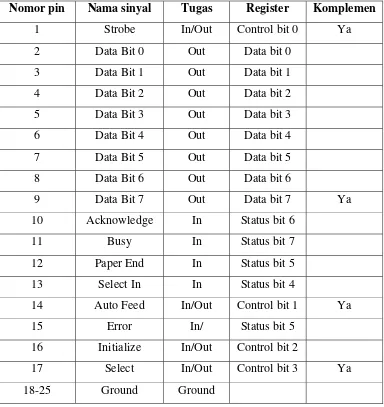
Konfigurasi slot DB-25 dapat dilihat pada gambar 2.7 :
Keterangan gambar 2.7 dapat dilihat pada tabel 2.2 di bawah ini:
Tabel 2.2 Konfigurasi pin dan nama sinyal konektor parallel standard DB-25.
Nomor pin Nama sinyal Tugas Register Komplemen
1 Strobe In/Out Control bit 0 Ya
2 Data Bit 0 Out Data bit 0
3 Data Bit 1 Out Data bit 1
4 Data Bit 2 Out Data bit 2
5 Data Bit 3 Out Data bit 3
6 Data Bit 4 Out Data bit 4
7 Data Bit 5 Out Data bit 5
8 Data Bit 6 Out Data bit 6
9 Data Bit 7 Out Data bit 7 Ya
10 Acknowledge In Status bit 6
11 Busy In Status bit 7
12 Paper End In Status bit 5
13 Select In In Status bit 4
14 Auto Feed In/Out Control bit 1 Ya
15 Error In/ Status bit 5
16 Initialize In/Out Control bit 2
17 Select In/Out Control bit 3 Ya
18-25 Ground Ground
Untuk dapat menggunakan port parallel, harus mengetahui alamatnya. Pada
tabel 2.3 alamat LPT1 adalah 888 (378h) dan LPT2 632 (278h). Setelah
mengetahui alamat dari port parallel, maka dapat mengetahui alamat Data Port,
Control Port, dan Status Port. Alamat Data Port adalah alamat dari port parallel
tersebut, alamat Status Port adalah hasil penaikan 1 angka dari Data Port, dan
Tabel 2.3 Alamat masing-masing port
Nama port Alamat
LPT1 Data 378h / 888
LPT1 Status 379h / 889
LPT1 Control 37Ah / 890
Visual basic tidak mempunyai kemampuan untuk mengakses hardware,
untuk itu dibutuhkan file inpout32.dll, selain itu digunakan file berektensi dll
yaitu kernel32.dll yang berfungsi sebagai pendukung program delay.
Fungsi-fungsi yang ada dalam file DLL ini, terlebih dahulu harus
dideklarasikan ke dalam visual basic (2). Pendeklarasian sebagai berikut :
Public Declare Function Inp Lib "inpout32.dll" _
Alias "Inp32" (ByVal PortAddress As Integer) As Integer
Public Declare Sub Out Lib "inpout32.dll" Alias "Out32"
(ByVal PortAddress As Integer, ByVal Value As Integer)
Private Declare Sub Sleep Lib “kernel32.dll”
(ByVal dwMilisecond as integer)
Pada inpout32.dll ada dua fungsi yang dideklarasikan yaitu Inp dan Out,
fungsi Inp berguna untuk membaca nilai yang terdapat pada alamat port yang
diinginkan, sedangkan fungsi Out digunakan untuk mengeluarkan nilai sebesar
yang diinginkan pada port yang diinginkan. Fungsi Inp dan Out dapat digunakan
secara bersamaan. Berikut format memanggil fungsi di atas :
Out (alamat port, nilai)
Variabel = Inp (alamat port)
Contoh penggalan program untuk menuliskan dan membaca nilai parallel port:
Private Sub Command1_Click()
Dim Nilai as Long
Out &H378, 1
Nilai = Inp(&H378)
MessegeBox Nilai
End Sub
Jika penggalan program di atas dijalankan, maka akan menampilkan kotak
pesan “1”, karena telah diset high pada port 378h, sebaliknya juga dapat diset low
2.6. Visual Basic Sebagai Perangkat Lunak Penghasil Data Biner Di PC 2.6.1. Mengenal Visual Basic
Visual Basic (atau sering disingkat VB) adalah perangkat lunak untuk
menyusun program aplikasi yang bekerja dalam lingkungan sistem operasi
windows (1).
Visual Basic adalah salah satu bahasa pemrograman komputer. Bahasa
pemrograman adalah perintah-perintah yang dimengerti oleh komputer untuk
melakukan tugas-tugas tertentu. Bahasa pemrograman Visual Basic, yang
dikembangkan oleh Microsoft sejak tahun 1991, merupakan pengembangan dari
pendahulunya yaitu bahasa pemrograman BASIC (Beginner’s All-purpose
Symbolic Instruction Code) yang dikembangkan pada era 1950-an. Visual Basic
merupakan salah satu Development Tool yaitu alat bantu untuk membuat berbagai
macam program komputer, khususnya yang menggunakan sistem operasi
Windows.
2.6.2. Integrated Development Environment (IDE) VB 6
Tampilan area kerja atau IDE VB 6 terlihat pada gambar 2.8.
Bagian-bagian di dalam IDE VB 6 berikut ini :
Keterangan Gambar :
1. Menubar
Menu ini akan mengontrol semua operasi yang berlangsung (bila menu
dipilih akan muncul menu lagi sebagai bagian dari menu utamanya).
2. Toolbar
Mempunyai tombol yang menghubungkan perintah untuk menjalankan
beberapa pilihan menu pada menu bar.
3. Toolbox
Menu yang terdiri atas control object yang akan digunakan untuk
menyusun aplikasi pada bidang kerja From yang telah disediakan. Jika
ditekan maka di layar akan tampil seperti gambar 2.9.
Gambar 2.9 Toolbox pada Visual Basic
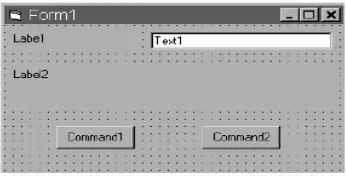
4. Jendela From
Pusat untuk merancang dan membangun sebuah aplikasi yang diinginkan
dan from ini merupakan sebuah bidang perancangan aplikasi. Tampilan
pada layar akan terlihat seperti gambar 2.10.
Gambar 2.10 Jendela From
5. Jendela Code
Gambar 2.11 Jendela Code
6. Project Explorer
Menampilkan semua informasi yang berhubungan dengan project yang
sedang aktif. Bagian ini memuat daftar form dan modul yang akan dibuat.
7. Jendela Properties
Digunakan untuk menentukan keadaan awal nilai properties dari object
yang dipilih. Gambar 2.12 adalah jendela properties pada Visual Basic.
Gambar 2.12 Jendela Properties
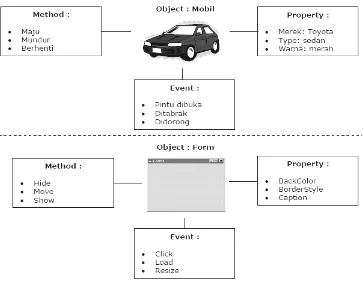
2.6.3. Object, Property, Method dan Event
Dalam pemrograman ini, ada istilah object, property, method dan event
sebagai berikut :
Object : komponen di dalam sebuah program
Property : karakteristik yang dimiliki object
Method : aksi yang dapat dilakukan oleh object
Event : kejadian yang dapat dialami oleh object
Sebagai ilustrasi dapat menganggap sebuah mobil sebagai obyek yang
Gambar 2.13 Ilustrasi objek yang memiliki event, method dan properties
2.6.4. Data dan Variabel
Ketika seorang user (pengguna) menggunakan sebuah program komputer,
seringkali komputer memintanya untuk memberikan informasi. Informasi ini
kemudian disimpan atau diolah oleh komputer. Informasi inilah yang disebut
dengan data.
Dalam melakukan pemrograman akan selalu memerlukan tempat
penyimpanan data, misalnya untuk menampung data hasil perhitungan atau data
hasil pembacaan register. Tempat penyimpanan itu dinamakan Variabel.
Penggunaan variabel seperti pada bahasa pemrograman lain harus
mempunyai nama dan tipe data tertentu. Variabel menunjuk alamat memori
tertentu di komputer, sedangkan tipe data menunjukkan besarnya memori yang
disediakan variabel tersebut. Tabel 2.4 adalah tipe data, beserta ukuran dan
jangkauan.
Visual Basic mengenal beberapa tipe data, antara lain :
3. Single adalah tipe data untuk angka pecahan. 4. Currency adalah tipe data untuk angka mata uang. 5. Date adalah tipe data untuk tanggal dan jam.
6. Boolean adalah tipe data yang bernilai TRUE atau FALSE. Tabel 2.4 Tipe data pada Visual Basic
Tipe data Ukuran byte Range
Integer 2 byte -32.768 sampai 32.767
Long Integer 4 byte -2.147.483.648 sampai
2.147.483.647
Single-precision floating
Point
4 byte -3,402823 E38 sampai
3,402823 E38
Double-precision floating point
8 byte -1,79769313486232 E+308 sampai
dengan
-4,94065645841246544 E-324 untuk nilai negatif
4,94065645841246544 E-324 sampai dengan 1,79769313486232 E+308 untuk nilai positif
Date 8 byte Tgl. 1 Januari 0001 sampai dengan
Tgl. 31 Desember 9999
Jam 0:00:00 sampai dengan Jam 23:59:59
Boolean 2 byte True dan False
String 1 byte/charakter
0 sampai 65.532
Byte 1 byte 0 sampai 255
Variabel dibuat melalui penulisan deklarasi variabel di dalam kode
program :
Dim <nama_variabel> As <type_data> Contoh : Dim nama_user As String
Aturan di dalam penamaan variabel :
a. Harus diawali dengan huruf.
b. Tidak boleh menggunakan spasi. Spasi bisa diganti dengan karakter
c. Tidak boleh menggunakan karakter-karakter khusus (seperti : +, -, *, /, <,
>, dll).
d. Tidak boleh menggunakan kata-kata kunci yang sudah dikenal oleh Visual
Basic 6 (seperti : dim, as, string, integer, dll).
Untuk tipe data string dan date nilai_data harus diapit tanda pembatas. Type
data string dibatasi tanda petik ganda: "nilai_data". Tipe data date dibatasi tanda
pagar : #nilai_data#. Tipe data lainnya tidak perlu tanda pembatas.
Contoh : Dim Namaku As String = "Anton" Dim TglLahir As Date = #12/10/1981#
Variabel yang nilai datanya bersifat tetap dan tidak bisa diubah disebut
konstanta. Penulisan deklarasi konstanta di dalam kode program :
Const <nama_kontanta> As <type_data> = <nilai_data> Contoh : Const tgl_ujian As Date = #25/09/2003#
2.6.5. Operator
Operator di dalam bahasa pemrograman bisa diartikan sebagai simbol
yang digunakan untuk melakukan suatu operasi terhadap nilai data. Simbol
operator bisa berupa karakter ataupun kata khusus. Visual Basic 6 mengenal tiga
jenis operator, yaitu :
1. Operator Aritmatika
Digunakan untuk operasi matematis terhadap nilai data. Simbol-simbol
yang digunakan terlihat pada tabel 2.5.
Tabel 2.5 Operator Aritmatika
Simbol Operasi Matematis Contoh
^ Pemangkatan 5 ^ 2 hasilnya 25
* Perkalian 5 * 2 hasilnya 10
/ pembagian (hasil pecahan) 5 / 2 hasilnya 2,5
\ pembagian (hasil bulat) 5 \ 2 hasilnya 2
Mod sisa pembagian 5 Mod 2 hasilnya 1
+ Penjumlahan 5 + 2 hasilnya 7
- Pengurangan 5 – 2 hasilnya 3
2. Operator Perbandingan
Digunakan untuk operasi yang membandingkan nilai data. Simbol-simbol
yang digunakan terlihat pada tabel 2.6.
Tabel 2.6 Operator Perbandingan
Simbol Operasi Perbandingan Contoh
< lebih kecil 5 < 2 hasilnya FALSE
> lebih besar 5 > 2 hasilnya TRUE
<= lebih kecil atau sama dengan 5 <= 2 hasilnya FALSE
>= lebih besar atau sama dengan 5 >= 2 hasilnya TRUE
= sama dengan 5 = 2 hasilnya FALSE
<> tidak sama dengan 5 <> 2 hasilnya TRUE
3. Operator Logika
Digunakan untuk operasi yang membandingkan suatu perbandingan.
Simbol-simbol yang digunakan terlihat pada tabel 2.7.
Tabel 2.7 Operator Logika
Simbol Operasi Logika Contoh
Or Atau (5 < 2) Or (5 > 2) hasilnya TRUE
And Dan (5 < 2) And (5 > 2) hasilnya FALSE
BAB III PERANCANGAN
Dalam penyusunan tugas akhir ini diharapkan dapat dibuat suatu perangkat
keras yang dapat menunjang rancangan yang telah ada. Oleh karena itu dalam bab
ini akan diuraikan perancangan yang nantinya akan menunjang perangkat keras
yang akan dibuat.
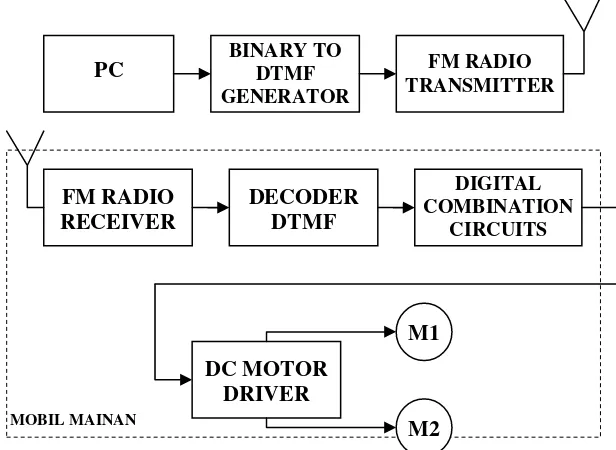
3.1. Diagram Blok Rangkaian Remote Control Mobil Mainan
Remote control menggunakan sinyal DTMF yang digunakan sebagai kode
pengontrolan. PC melalui port parallel mengeluarkan data berbentuk biner untuk
memilih nada dari DTMF yang kemudian diaplikasikan untuk mengatur jalannya
mobil mainan, dengan perantaraan gelombang radio. Sinyal yang diterima oleh
penerima radio kemudian diubah ke bentuk biner oleh Dekoder DTMF,
selanjutnya data biner diolah di rangkaian digital combination agar dapat
menggerakkan motor sesuai dengan tujuan. Sistem kendali tersebut terbagi atas
dua bagian yang saling berkaitan satu dengan lainnya, yaitu perancangan
perangkat keras dan perancangan perangkat lunak. Gambar 3.1. adalah diagram
blok dari Rangkaian Remote Kontrol Mobil Mainan.
Gambar 3.1 Diagram Blok Remote Kontrol Mobil Mainan.
PC
BINARY TO DTMF GENERATOR
FM RADIO TRANSMITTER
MOBIL MAINAN
FM RADIO RECEIVER
DECODER DTMF
DIGITAL COMBINATION
CIRCUITS
DC MOTOR DRIVER
M1
3.2. Personal Computer (PC)
Perancangan PC menggunakan PC standard bersistem operasi Windows
98/2000/XP.
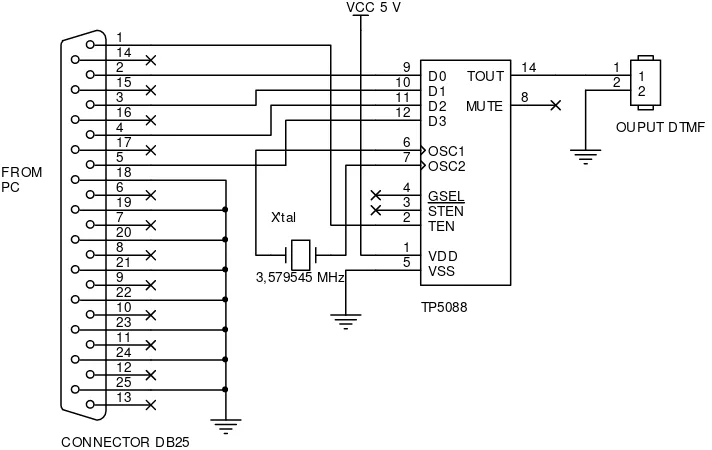
3.3. Binary to DTMF Generator
Perancangan Rangkaian Binary to DTMF Generator menggunakan IC
TP5088N yang bekerja pada tegangan DC sebesar 5 V dan sebuah kristal
frekuensi 3,579545 MHz. Tones Out terjadi saat transisi rendah ke tinggi dari
TONE ENABLE. Pengendalian TONE ENABLE dilakukan oleh PC dengan
menghubungkan pin dua (TEN) ke pin satu dari port paralel DB-25
. Nada yang dihasilkan melalui TOUT akan dipancarkan oleh Pemancar. Untuk
skema rangkaian selengkapnya pada Gambar 3.2.
VCC 5 V
TP5088 14 9 10 11 12 6 7 4 3 2 8 1 5 TOUT D0 D1 D2 D3 OSC1 OSC2 GSEL STEN TEN MUTE VDD VSS CONNECTOR DB25 13 25 12 24 11 23 10 22 9 21 8 20 7 19 6 18 5 17 4 16 3 15 2 14 1 OUPUT DTMF 1 2 1 2 FROM PC 3,579545 MHz X'tal
Gambar 3.2 Rangkaian Binary To DTMF Generator.
3.4. DECODER DTMF
IC MT8870D bekerja pada tegangan DC sebesar 5 V, dan sebuah kristal
3,579545 MHz. Sebelum pasangan nada dikenali sebagai nada DTMF (Valid
Tone), penerima akan mengecek terlebih dahulu durasi sinyalnya. Pengecekkan
Early Steering. Pengaturan-pengaturan steering yang berbeda dapat digunakan
untuk memilih Guard Time bagi Tone Present ( ) dan Tone Absent ( ). Bila
nilai dari waktu deteksi nada present ( ) sebesar 14 ms dan durasi sinyal yang
dapat diterima oleh penerima ( ) sebesar 40ms, maka dapat dicari nilai dari
Tone Present ( ) :
GTP
t tGTA
DP t REC t GTP t GTP DP
REC t t
t = +
GTP t ms
ms=14 +
40
ms ms
tGTP =40 −14 ms tGTP =26
Dari perhitungan di atas didapat nilai guard time bagi Tone Present ( )
sebesar 26ms. Bila nilai C2 sebesar 100nF, maka dapat dicari nilai dari R3 dengan
persamaan berikut :
GTP t
(
) (
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⋅ = TSt DD DD GTP V V V C Rt 3 2 ln
(
) (
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⋅ = 5 , 2 5 5 ln 100 326ms R nF
(
3 100)
ln226ms= R ⋅ nF
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = nF ms R 100 2 ln 26 3
R3 = 375100 Ω
Dalam perancangan digunakan resistor sebesar 375 kΩ. Sebuah logika
tinggi pada early steering menyebabkan (tegangan kapasistor) meningkat
bersamaan dengan pelepasan yang dilakukan oleh kapasitor. Apabila kondisi
sinyal dipertahankan ( tetap tinggi) untuk mencapai periode validasi ( ),
mencapai nilai ambang ( ) pada pengendali logika (steering logic) untuk
meregistrasi pasangan nada, memasukkan kode 4-bit yang terkait dengannya
kedalam latch keluaran. Pada keadaan ini keluaran (Guard Time) akan
diaktifkan dan dikendalikan ke . akan tetap tinggi selama Early
C V
ESt tGTP
C
V VTSt
GT
C
Steering juga tinggi. Setelah penundaan sementara pada latch keluaran, keluaran
Delayed Steering (StD) akan menjadi tinggi dan sebagai tanda bahwa pasangan
nada telah diterima. Isi dari keluaran latch ditempatkan pada saluran keluaran
4-bit (Q1,Q2,Q3 dan Q4) dengan cara meninggikan masukan kontrol tiga keadaan
(TOE) menjadi logika tinggi. Skema rangkaian untuk dekoder DTMF
menggunakan IC MT8870D pada Gambar 3.3.
GS 3 Vref 4 D3 14 PWDN 6 OSC1 7 INH 5 D0 11 D1 12 IN+ 1 IN-2 D2 13 VSS 9 TOE 10 StD 15 OSC2 8 ESt 16 St/GT 17 VDD 18 MT8870D R1 100k R2 100k R3 375k C1 100nF INPUT DTMF C2 100nF X1 3,579545 MHz 1 2 1 2 3 4 5 OUTPUT BINER VCC 5V
Gambar 3.3 Decoder DTMF menggunakan IC MT8870D.
3.5. DIGITAL COMBINATION CIRCUITS
Data biner 4-bit dari IC MT8870D sebagai data untuk menggerakkan
motor DC sehingga mobil mainan bisa bergerak sesuai keinginan. Perancangan
rangkaian ini akan menggerakkan 2 buah motor DC. Satu motor DC berhubungan
dengan arah yaitu kanan, kiri dan lurus, sedang motor DC kedua berhubungan
dengan kecepatan (middle atau full), mundur dan stop. Digital Combination
Circuits menggunakan gerbang logika IC TTL. Untuk dapat merancang rangkaian
ini digunakan peta Karnaugh (peta-K). Langkah awal adalah dengan menyusun
Truth Table (Tabel Kebenaran) dari kombinasi-kombinasi gerakan. Tabel
kebenarannya terlihat pada Tabel 3.1. Masukan bagi rangkaian digital dari IC
Tabel 3.1 Kombinasi gerakan mobil mainan.
D C B A Maju Kanan Kiri Full = 1
Middle = 0 Mundur
Kombinasi gerakan
0 0 0 0 0 0 0 0 0 -
0 0 0 1 1 0 0 0 0 Maju middle
0 0 1 0 0 0 0 0 0 -
0 0 1 1 0 0 0 0 0 -
0 1 0 0 1 0 0 1 0 Maju full
0 1 0 1 1 1 0 1 0 Maju kanan full
0 1 1 0 0 0 0 0 0 -
0 1 1 1 0 0 0 0 1 Mundur
1 0 0 0 0 0 0 0 0 Stop
1 0 0 1 0 0 0 0 0 -
1 0 1 0 1 1 0 0 0 Maju kanan middle
1 0 1 1 1 0 1 0 0 Maju kiri middle
1 1 0 0 1 0 1 1 0 Maju kiri full
1 1 0 1 0 0 0 0 0 -
1 1 1 0 0 0 0 0 0 -
1 1 1 1 0 0 0 0 0 -
3.5.1. Pengelompokan Kombinasi Gerakan
Berikut pengelompokan masing-masing kombinasi gerakan,
a. Gerakan Maju
Berikut tabel kebenaran pada tabel 3.2, penyerdehanaan dengan peta-K pada
gambar 3.4 dan rangkaian digital dari gerakan Maju pada gambar 3.5 :
Tabel 3.2 Tabel kebenaran gerakan Maju.
D C B A Maju
0 0 0 0 0
0 0 0 1 1
0 0 1 0 0
DC
BA
0 0 1 1 0
0 1 0 0 1
0 1 0 1 1
0 1 1 0 0
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 1
1 0 1 1 1
1 1 0 0 1
1 1 0 1 0
1 1 1 0 0
1 1 1 1 0
00
01
10
11
01
10
11
00
0
0
1
1
0
0
0
0
1
0
1
1
0
0
0
1
Gambar 3.4 Peta-K gerakan Maju
Hasil penyerdehanaan didapat : D• /C • B + /D• /B • A + C • /B• /A
D /C B /D /B A C /B /A MAJU
b. Gerakan Kanan
Berikut tabel kebenaran pada tabel 3.3, penyerdehanaan dengan peta-K pada
gambar 3.6 dan rangkaian digital dari gerakan Kanan pada gambar 3.7 :
Tabel 3.3 Tabel kebenaran gerakan Kanan.
D C B A Kanan
0 0 0 0 0
0 0 0 1 0
0 0 1 0 0
0 0 1 1 0
0 1 0 0 0
0 1 0 1 1
0 1 1 0 0
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 1
1 0 1 1 0
1 1 0 0 0
1 1 0 1 0
1 1 1 0 0
1 1 1 1 0
DC
BA
00
01
10
11
01
10
11
00
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
Gambar 3.6 Peta-K gerakan Kanan
Hasil penyerdehanaan didapat : /D•C• /B • A + D• /C • B • /A
KANAN /D C /B A /C D B /A
c. Gerakan Kiri
Berikut tabel kebenaran pada tabel 3.4, penyerdehanaan dengan peta-K pada
gambar 3.8 dan rangkaian digital dari gerakan Kiri pada gambar 3.9 :
Tabel 3.4 Tabel kebenaran gerakan Kiri.
D C B A Kiri
0 0 0 0 0
0 0 0 1 0
0 0 1 0 0
DC
BA
0 0 1 1 0
0 1 0 0 0
0 1 0 1 0
0 1 1 0 0
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 0
1 0 1 1 1
1 1 0 0 1
1 1 0 1 0
1 1 1 0 0
1 1 1 1 0
00
01
10
11
01
10
11
00
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
Gambar 3.8 Peta-K gerakan Kiri
Hasil penyerdehanaan didapat : D•C • /B• /A + D• /C B • • A
KIRI D C /B /A D /C B A
d. Gerakan Full / Middle
Berikut tabel kebenaran pada tabel 3.5, penyerdehanaan dengan peta-K pada
gambar 3.10 dan rangkaian digital dari gerakan Full/Middle pada gambar 3.11 :
Tabel 3.5 Tabel kebenaran gerakan Full / Middle.
D C B A Full = 1 Middle = 0
0 0 0 0 0
DC
BA
0 0 0 1 0
0 0 1 0 0
0 0 1 1 0
0 1 0 0 1
0 1 0 1 1
0 1 1 0 0
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 0
1 0 1 1 0
1 1 0 0 1
1 1 0 1 0
1 1 1 0 0
1 1 1 1 0
00
01
10
11
01
10
11
00
0
0
0
1
0
0
0
0
0
0
1
1
0
0
0
0
Gambar 3.10 Peta-K gerakan Full/Middle
Hasil penyerdehanaan didapat : C • /B • /A + /D• C • /B
FULL/MIDDLE C
/B /A
/D C /B
e. Gerakan Mundur
Berikut tabel kebenaran pada tabel 3.6, penyerdehanaan dengan peta-K pada
gambar 3.12 dan rangkaian digital dari gerakan Maju pada gambar 3.13 :
Tabel 3.6 Tabel kebenaran gerakan Mundur.
D C B A Mundur
0 0 0 0 0
0 0 0 1 0
0 0 1 0 0
0 0 1 1 0
0 1 0 0 0
0 1 0 1 0
0 1 1 0 0
0 1 1 1 1
1 0 0 0 0
1 0 0 1 0
1 0 1 0 0
1 0 1 1 0
1 1 0 0 0
1 1 0 1 0
1 1 1 0 0
1 1 1 1 0
DC
BA
00
01
10
11
01
10
11
00
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Gambar 3.12 Peta-K gerakan Mundur
Hasil penyerdehanaan didapat : /D• C • B • A
A C /D B
MUNDUR
3.5.2. Perancangan Rangkaian Digital
Proses penyerdehanaan didapat rangkaian digital untuk masing-masing
kombinasi gerakan. Input dari rangkaian digital adalah data biner 4-bit dari output
IC MT8870D sedang masing-masing output dari rangkaian digital dihubungkan
dengan motor driver yaitu IC L293D dan rangkaian switching transistor. Gambar
3.14 adalah rangkaian digital hasil penyerderhanaan.
C /B /A D /C B A D C /B /A D /C B /A /D C /B A C /B /A D /C B /D C B A /D /B A /D C /B D C B A GND 1 2 1 2 1 2 1 2 1 2 KANAN KIRI FULL/MID MAJU MUNDUR
Gambar 3.14 Rangkaian digital kombinasi gerakan.
Perancangan menggunakan IC TTL. Dari skema rangkaian terdapat
gerbang NOT 11 buah, gerbang AND 3 masukan ada 6 buah, gerbang AND 4
masukan ada 4 buah, gerbang OR 2 masukan ada 3 buah, dan sebuah gerbang OR
3 masukan. IC TTL yang digunakan adalah IC 74LS04 untuk gerbang NOT
IC 74LS21 untuk gerbang AND 4 masukan sebanyak 3 buah dan 2 buah IC
74LS32 untuk gerbang OR.
3.6. Motor DC sebagai penggerak Mobil Mainan (Motor Driver)
Dua buah Motor DC sebagai penggerak dan menentukan arah. Pada
Gambar 3.15 Motor DC pertama (M1) dipasang di depan sedang motor DC kedua
(M2) dipasang di belakang. Perancangan elektronik menggunakan IC L293D dan
rangkaian Switching Transistor.
VCC 9V
MUNDUR KIRI
RODA DEPAN (KANAN-KIRI)
RODA BELAKANG (MAJU-MUNDUR) VCC 5V
FULL/MIDD
Q1 BC547
RELAY SPDT 9V
R1 1,8k M1 -+ U1 L293D 2 7 10 15 1 9 3 6 11 14 16 8
4 5 12 13
IN1 IN2 IN3 IN4 EN1 EN2 OUT1 OUT2 OUT3 OUT4 VSS VC GN D GN D GN D GN D MAJU KANAN D1 1N4002 R2 5,1 M2 -+
Gambar 3.15 Rangkaian Motor Driver.
a. Motor DC pertama (M1) berhubungan Arah (Kanan, Kiri dan Lurus)
Perancangan Motor DC pertama (M1) pada body mobil mainan diletakan di
depan. Untuk mengatur arah putaran motor dc pertama (M1) menggunakan IC
L293D dapat dilakukan dengan cara sebagai berikut :
1. Input 1 berlogika tinggi, input 2 berlogika rendah maka output 1
berlogika tinggi dan output 2 berlogika rendah. Dengan demikian motor
dc akan berputar searah dengan jarum jam atau belok kanan.
2. Input 2 berlogika tinggi, input 1 berlogika rendah maka output 2
berlogika tinggi dan output 1 berlogika rendah. Dengan demikian motor
b. Motor DC kedua (M2) berhubungan Kecepatan (Full, Middle, Mundur dan Stop)
Perancangan motor dc kedua (M2) pada body mobil mainan diletakan di
belakang. Untuk mengatur jalannya mobil menggunakan IC L293D dan relay
dapat dilakukan dengan cara sebagai berikut :
b.1. Mengatur Maju atau Mundur
1. Input 4 berlogika tinggi, input 3 berlogika rendah maka output 4 berlogika
tinggi dan output 3 berlogika rendah, relay NC. Dengan demikian motor
dc akan berputar berlawanan dengan arah jarum jam atau mobil mainan
mundur.
2. Input 3 berlogika tinggi, input 4 berlogika rendah maka output 3 berlogika
tinggi dan output 4 berlogika rendah, relay NC.Dengan demikian motor dc
akan berputar searah dengan jarum jam atau mobil mainan maju middle.
3. Input 3 berlogika tinggi, input 4 berlogika rendah maka output 3 berlogika
tinggi dan output 4 berlogika rendah, NO relay terhubung. Dengan
demikian motor dc akan berputar searah dengan jarum jam atau maju full.
b.2. Mengatur Full atau Middle
Untuk mengatur pada bagian ini pertama digunakan Switching Transistor
yang dihubungkan dengan sebuah relay 9V, berfungsi sebagai saklar
elektronik. Rangkaian ini, sinyal masukannya berlogika 1 (5 volt) atau 0 (0 volt)
dari IC TTL. Nilai ini dipakai untuk bias pada kaki base transistor dengan emitter
dan collector sebagai penghubung (short circuit) atau sebagai pembuka rangkaian
(open circuit). Begitu rangkaian short circuits arus akan mengalir dari kaki
collector ke emitter. Gambar 3.16 adalah skema Switching Transistor bagian dari
gambar 3.15. Jika menggunakan relay 9V dengan = 400 Ω (hasil
pengukuran), Transistor NPN Silicon BC547 ( maks = 100mA,
relay R
C
I β = 110) maka
dapat diketahui.
D1 1N4002
RELAY SPDT 9V
PIN 11 IC L293D
VCC 9V R1 1,8k
M2
-+ Q1 BC547 R2 5,1PIN 14 IC L293D
FULL/MIDDLE
Gambar 3.16 Skema Switching Transistor.
Hambatan pada = 400Ω dengan = 9 V, pada saat transistor
saturasi maka ;
relay
R VCC
0 = CE V
( )
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = Ι relay CE CC C R V V sat( )
Ω = 400 9V sat IC( )
=0,0225ΙC sat
( )
sat mAC =22,5
Ι
Supaya transistor berada pada keadaan saturasi maka paling sedikit
dengan B I 110 = β ;
( )
β ) (sat I sat I C B =( )
110 5 , 22 mA satIB =
( )
sat AIB =2,045.10−4
( )
sat I V V R B BE BB B − = A V VRB 4
10 . 045 , 2 7 , 0 5 , 4 − − = Ω =18581 B R
maksimal yang bisa digunakan sebesar 18,581 KΩ.
B R
adalah harga arus yang tepat akan menyebabkan
transistor menjadi saturasi. Agar lebih pasti, yang digunakan harus dipilih
supaya > , misalnya
( )
sat AIB 4 10 . 045 , 2 −
= IB
B R
B
I IB
(
sat)
IB =10×IB( )
sat =2,045mA ini dapat dicapai bila,B BE BB B I V V
R = −
mA V V RB 045 , 2 7 , 0 5 , 4 − = Ω =1858 B R
Atau resistor yang digunakan RB =1,8KΩ.
Langkah selanjutnya membagi tegangan antara R2 dan Motor. R2
berfungsi sebagai pengurang tegangan sebesar 1,5 Volt dari tegangan yang keluar
dari IC L293D untuk mendapatkan kecepatan Middle. Perancangannya
menggunakan pembagi tegangan. Ilustrasinya terlihat pada gambar 3.17.
R2
V
R motor RELAY NC
V MOTOR Vs
Gambar 3.17 Pembagi Tegangan.
Jika dari pengukuran didapat R motor sebesar 19Ω, tegangan yang
dirancang (Vmotor) sebesar sebesar 7 V dari tegangan keluaran IC L293D sebesar
Vs R Rmotor
Rmotor
Vmotor ⋅
+ =
2
V R
V 9
2 19
19
7 ⋅
+ Ω
Ω =
19 43 , 24 2= −
R
Ω = ≅ Ω
=5,43 2 5,1
2 R
R
Nilai resistor R2 dan ada dipasaran, maka tidak digunakan nilai yang
mendekati.
B R
3.7. Pemancar (TX) dan Penerima (RX)
Ketepatan frekuensi antara pemancar dan penerima sangat berpengaruh
pada informasi yang disampaikan. Informasi diharapkan bisa sampai pada
penerima sesuai dengan aslinya. Kemampuan perangkat (pemancar atau
penerima) memang benar-benar harus mendukung, untuk itu sebagai perangkat
menggunakan 2 buah Tranceiver Handy Talky (HT). HT pertama sebagai
pemancar dan HT kedua sebagai penerima. Cara menghubungkan pada gambar
3.18. Untuk masukan nada DTMF ke pemancar lewat external mic sedang pada
penerima nada DTMF dihubungkan ke externalspeaker.
3.8. Pemrograman Dengan VB (Visual Basic) 3.8.1. User Interface
Gambar 3.19 adalah rancangan tampilan User Interface (UI) :
Kecepatan
Full
Middle
Arah
Maju lurus
Maju kanan Maju kiri
Mundur
Stop
Text Box
Gambar 3.19 Rancangan tampilan User Interface (UI).
Layar ini akan muncul setelah program dijalankan (Run). Perancangan tata
letak objek terdiri dari Frame, Text Box, Option dan command Button. Pada layar
ini user diminta memilih kecepatan terlebih dahulu, setelah itu tekan tombol pada
Frame arah untuk menjalankan mobil mainan. Text Box menginformasikan arah
gerak sesuai tombol yang ditekan.
Keterangan Gambar 3.19 :
• Frame Kecepatan : Pengelompokan pemilihan kecepatan
• Frame Arah : Pengelompokan fungsi arah
• Text Box : Menampilkan informasi arah dan kecepatan
• Option1 (Full) : Memilih kecepatan penuh
• Option2 (Middle) : Memilih kecepatan sedang
(Maju Lurus)
• CommandButton2 : Bergerak kearah maju kanan
(Maju Kanan)
• CommandButton3 : Bergerak kearah maju kiri
(Maju Kiri)
• CommandButton4 : Bergerak mundur
(Mundur)
• CommandButton5 : Berhenti
(Stop)
Untuk pengaturan properti setiap objek dari User Interface (UI)
ditunjukkan pada tabel 3.7.
Tabel 3.7 Properti User Interface.
No. Object Properties Value
1. Form1 Caption
Start Up Position
Remote Control
2-Center Screen
2. Frame1 Caption Kecepatan
3. Frame2 Caption Arah
4. Option1 Caption
Alignment
Middle
0-Left Justify
5. Option2 Caption
Alignment
Full
0-Left Justify
6. Text1 Alignment 2-Center
7. Command1 Caption Maju Lurus
8. Command2 Caption Maju Kanan
9. Command3 Caption Maju Kiri
10. Command4 Caption Mundur
3.8.2. Flowchart
Untuk mempermudah menulis kode program setiap objek terlebih dahulu
membuat diagram alir program atau flowchart.
a. Flowchart Utama
Urutan langkah program :
1. Tentukan event pada Form1.
2. Inisialisasi.
3. Set Kecepatan (Full dan middle).
4. Set Arah (Maju, Kanan, Kiri).
Flowchart Utama ditunjukkan pada Gambar 3.20.
b. Flowchart Set Kecepatan
Urutan langkah program :
1. Jika kecepatan Middle dipilih (mobil bergerak dengan kecepatan middle),
jika tidak ke kecepatan Full.
2. jika kecepatan Full dipilih (mobil bergerak dengan kecepatan full), jika
tidak program akan kembali pilih kecepatan.
Flowchart Set Kecepatan ditunjukkan pada Gambar 3.21.
Gambar 3.21 Flowchart Set Kecepatan.
c. Flowchart Set Arah
Urutan langkah program :
1. Jika kecepatan Middle dipilih, mobil akan bergerak dengan kecepatan
Middle, arahnya yaitu Maju lurus, Maju Kanan, Maju Kiri.
2. Jika kecepatan Full dipilih, mobil akan bergerak dengan kecepatan Full,
arahnya yaitu Maju Lurus, Maju Kanan dan Maju Kiri.
3. Arah tidak ada yang dipilih maka kembali ke set kecepatan.
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan dibahas tentang hasil akhir dari alat yang dibuat. Untuk
mengetahui apakah alat yang sudah jadi sesuai dengan rancangan awal. Pengamatan
meliputi pengamatan hasil akhir alat yang telah dibuat, pengamatan pada perangkat
lunak, pengamatan rangkaian DTMF, pengamatan rangkaian switching transistor,
pengamatan tegangan untuk kecepatan Middle, pengamatan pada rangkaian motor
driver sedangkan, alat yang digunakan adalah multitester digital dan osiloskop
digital.
4.1. Pengamatan Hasil Akhir Alat Yang Telah Dibuat
Keseluruhan rangkaian dalam sistem ini berintikan sebuah enkoder DTMF,
PC (Personal Computer), Handy Talky (HT) pada bagian pemancar serta dekoder