PENERAPAN MINI ROBOT DENGAN KONSEP OMNI DIRECTIONAL UNTUK MENDAPATKAN INFORMASI PADA DAERAH BERBAHAYA
Billy Hendrik1 Mardhiah Masril2 Ruri Hartika Zain3
ABTRACT
Application of mini robot with omni directional concept is expected to create a new system that can be used by researchers to retrieve data such as pictures or videos. Objects retrieval research can be located in areas which are dangerous and difficult to reach by humans. Where's the mini robot will be able to move 10 directions so pictures can be taken from many sides and in addition this robot can be controlled by the user from a distance because it supported wifi facility.
Keywords: mini robot, omni directional, berahaya area, wifi.
INTISARI
Penerapan mini robot dengan konsep omni directional diharapkan mampu menciptakan sistem baru yang dapat digunakan oleh peneliti untuk mengambil data berupa gambar atau video. Pengambilan Objek penelitian tersebut dapat berada pada daerah yang berbahaya dan sulit dijangkau oleh manusia. Dimana mini robot ini nantinya dapat bergerak 10 arah sehingga gambar dapat diambil dari banyak sisi dan selain itu robot ini dapat dikontrol oleh penggunanya dari jarak jauh karena didukung fasilitas wifi.
Kata Kunci : mini robot, omni directional, daerah berahaya, wifi.
1
Dosen UPI YPTK Padang 2
Dosen UPI YPTK Padang 3
PENDAHULUAN
Secara bahasa robot memiliki
arti ”Pekerja”, yang mampu
menjalankan tugas – tugas fisik, baik dibawah kendalli dan pengawasan manusia, atau pun yang dijalankan dengan serangkaian program yang telah didefinisikan terlebih dahulu atau
kecerdasan buatan (artificial
intelligence). Jika sebelumnya robot hanya dioperasikan di laboratorium
ataupun dimanfaatkan untuk
kepentingan industri, di negera –
negara maju perkembangan robot mengalami peningkatan yang sangat tajam, saat ini robot telah digunakan sebagai alat membantu pekerjaan
manusia. Seiring dengan
berkembangnya teknologi, khususnya teknologi elektronika, peran robot menjadi semakin penting tidak saja dibidang sains, tapi juga diberbagai bidang lainnya seperti di bidang kedokteran , pertanian, bahkan militer. Di Indonesia sendiri mulai tahun
80-an, kebijakan nasional dalam
pengembangan riset teknologi telah memberikan dukungan pada litbang permesinan otomatis dalam rangka mencermati dan menunjang Sumber
Daya Manusia Indonesia yang
memiliki minat dan kemampuan untuk menguasai teknologi robot. Salah satu
wujud konkretnya adalah
dikembangkannya sejumlah
laboratorium, seperti MEPPO (Mesin
Perkakas Teknik Produksi dan
Otomatis) yang diprakarsai oleh BPPT bekerjasama dengan ITB, Industri Strategis, serta LET (Laboratorium Elektronika Terapan) di LIPI. Sejak
dikembangkannya sejumlah
laboratorium tersebut, beraneka
macam permesinan otomatis / robot
telah berhasil dikembangkan,
diproduksi, serta dikomersilkan oleh
berbagai industri, bahkan telah
dikembangkan jenis robot yang
memiliki kemampuan untuk
mengontrol seluruh sistem operasi suatu pabrik. Selain itu pada bidang pendidikan juga mulai berkembang robotika dengan adanya kontes robot
indonesia yang diselenggarakan
setiap tahun sejak tahun 2001. Secara sadar atau tidak saat ini robot telah
masuk dalam kehidupan sehari – hari
dalam berbagai bentuk dan jenis. Ada jenis robot sederhana yang dirancang
untuk melakukan kegiatan yang
sederhana, mudah dan berulang –
ulang, ataupun robot yang diciptakan khusus untuk melakukan sesuatu
yang rumit, salah satu contoh
penggunaan robot pada daerah
berbahaya yang ada sekarang ini adalah telah diaplikasikannya robot penjinak bom, dimana menjinakkan bom merupakan salah satu pekerjaan yang memiliki resiko tinggi, karena bisa mengakibatkan korban jiwa jika pekerjaan tersebut dilakukan oleh manusia.
Untuk itu peneliti tertarik untuk mengaplikasikan robotika pada bidang pendidikan atau ilmu pengetahuan, yang mana terkadang objek penelitian bisa saja berada pada daerah yang sulit dijangkau oleh manusia, bisa saja karena ruang yang terlalu kecil
sehingga tidak memungkinkan
manusia masuk atau mencapai objek tersebut atau bahkan mungkin saja objek penelitian tersebut berada pada daerah yang berbahaya yang tidak
memungkinkan manusia berada
terlalu dekat untuk mendapatkan data atau informasi.
Menurut peneliti sebuah data akan sangat baik jika disajikan dalam bentuk gambar atau video. Sebuah gambar itu kaya dengan informasi, maksudnya sebuah gambar dapat memberikan informasi yang lebih
tersebut disajikan dalam bentuk kata – kata (tekstual).
Oleh sebab itu penulis akan merancang dan membuat robot yang diasumsikan dapat mencapai tempat- tempat berbahaya dan sulit dijangkau khususnya yang mempunyai tingkat pencahayaan yang rendah (gelap), lokasi yang mengandung kadar gas berbahaya, dan lain lain. Dimana robot ini akan didukung oleh konsep omnidirectional dalam pergerakannya yaitu konsep pergerakan robot yang dapat bergerak banyak arah yaitu maju, mundur, geser kanan, geser kiri, putar kanan, putar kiri, serong kanan atas, serong kiri atas, serong kanan
bawah, serong kiri bawah dan robot ini
akan dilengkapi dengan wifi sehingga
dapat dikontrol dari jarak jauh,
sehingga diharapkan atau diduga
robot nantinya dapat mengambil
gambar dan video dengan baik dan jelas. Jadi tujuan peneliti untuk mendapatkan informasi dan data pada
objek penelitiannya yang sulit
dijangkau tidak menjadi kendala lagi apalagi data yang didapat dalam bentuk gambar dan video.
PENDEKATAN PEMECAHAN MASALAH
Mikrokontroler ATMEGA8535
Mikrokontroler dapat
diumpakan sebagai bentuk skala mini
dari mikrokomputer. Di dalam
mikrokontroler terdapat
komponen-komponen dasar dari sebuah
mikrokomputer, yaitu memori, CPU, dan instruksi-instruksi yang terpadu dalam satu keping IC. Tidak seperti
sistem komputer, yang mampu
menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka, dan sebagainya), mikrokontroler hanya digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada penggunaan dan perbandingan ukuran RAM (Random Access Memory) dan ROM (Read Only Memory).
Pada sistem komputer
perbandingan RAM dan ROM-nya besar, program-program pengguna disimpan dalam ruang RAM yang
besar, sedangkan rutin-rutin
antarmuka perangkat keras disimpan dalam ruang ROM yang jauh lebih kecil. Sedangkan pada mikrokontroler perbandingan RAM dan ROM-nya tidak terlalu besar, program kontrol disimpan dalam ROM sedangkan
RAM digunakan sebagai tempat
penyimpanan sementara. Pada MC ATMEGA8535 mempunyai Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D dan
Mikrokontroller AVR (Alf and Vegard’s
Risc processor) memiliki arsitektur 8
bit, dimana semua instruksi dikemas
dalam kode 16-bit dan sebagian besar
instruksi dieksekusi dalam 1 siklus
clock atau dikenal dengan teknologi
RISC (Reduced Instruction Set
Computing). Seperti yang terlihat pada
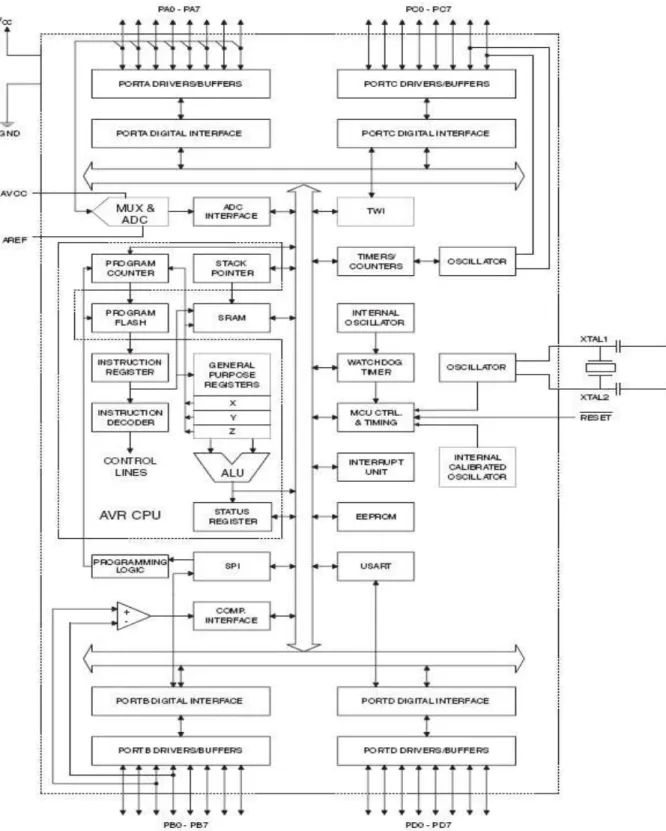
Gambar 1. Blok Diagram MC ATMEGA 8535 Dari gambar blok diagram
tersebut dapat dilihat bahwa
ATMega8535 memiliki bagian-bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A,Port B,Port C dan Port D.
2. ADC 8 channel 10 bit.
3. Tiga buah Timer/Counter dengan kemampuan pembanding.
4. CPU yang terdiri atas 32 buah
register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 KB
dengan kemampuan Read While
Write.
8. Interruptinternal dan eksternal
9. Port antarmuka SPI (Serial
Peripheral Interface).
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi
serial
Arsitektur dan Fitur pada ATMEGA 8535
Mikrokontroller AVR memiliki arsitektur RISC 8 Bit, sehingga semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus
instruksi clock. Dan ini sangat
membedakan sekali dengan instruksi MCS-51 (Berarsitektur CISC) yang membutuhkan siklus 12 clock. RISC
adalah Reduced Instruction Set
Computing sedangkan CISC adalah Complex Instruction Set Computing. AVR dikelompokkan kedalam 4 kelas,
yaitu ATtiny, keluarga AT90Sxx,
keluarga ATMega, dan keluarga
AT86RFxx. Dari kesemua kelas yang membedakan satu sama lain adalah ukuran onboard memori, on-board peripheral dan fungsinya. Dari segi
arsitektur dan instruksi yang
digunakan mereka bisa dikatakan hampir sama.
Arsitektur ATMega8535
Pada mikrokontroller
ATMega8535 memiliki arsitektur yang berbeda dari seri amtel lainnya. Arsitekturnya adalah seperti berikut :
1. Saluran IO sebanyak 32 buah,
yaitu Port A, Port B, Port C dan Port D
2. ADC 10 bit sebanyak 8 Channel
3. Tiga buah timer / counter
4. 32 register
5. Watchdog Timer dengan
oscilator internal
6. SRAM sebanyak 512 byte
7. Memori Flash sebesar 8 kb
8. Sumber Interrupt internal dan
eksternal
9. Port SPI (Serial Pheriperal
Interface)
10. EEPROM on board sebanyak 512 byte
11. Komparator analog
12. Port USART (Universal
Shynchronous Ashynchronous
Receiver Transmitter) Fitur ATMega8535
Mikrokontroller ATMega8535
juga memiliki berbagai fitur. Fitur – fiturnya adalah sebagai berikut :
1. Sistem processor 8 bit
berbasisRISC dengan
kecepatan maksimal 16 MHz.
2. Ukuran memoryflash 8KB,SRAM
sebesar 512 byte,EE PROM sebesar 512 byte.
3. ADC internal dengan resolusi 10
bit sebanyak 8 channel
4. Port komunikasi serial USART
dengan kecepatan maksimal 2.5 Mbps
5. Mode Sleep untuk penghematan
penggunaan daya listrik
GoPro Hero3
GoPro Hero3 ini dirancang untuk
merekam kegiatan – kegiatan diluar
Kemera ini memiliki perumahan kasar yang tahan air dikedalaman 60 m.
Kelebihan GoPro Hero3
a. Kamera mampu menangkap
Cinema 4K, Cinema 2.7K,
1440p dan Video Full HD 1920 x 1080p dan juga dapat merekam video 960p, 720p dan 480p. Mendukung NTSC dan PAL, dan dapat merekam hingga 240 fps. Untuk gambar diam, Hero3 didukung oleh 5, 7 dan 12-megapiksel foto.
b. Selain itu Hero3 dilengkapi Wi-Fi
sehingga pengambilan gambar dapat dikontol dari jarak jauh.
c. Kamera ini memiliki sudut ultra
wide, 6-elemen lensa aspherical, 12-megapixel cahaya rendah sensor gambar.
d. Slot kartu microSD yang
menerima kartu hingga 64GB.
e. Port USB 2.0, mikro HDMI
output dan port untuk aksesori opsional termasuk Adapter Mic Stereo 3.5mm dan Composite A / V Adapter.
f. Hero3 ini dilengkapi dengan
pengaturan kamera canggih
seperti perulangan video,
continuous photo, Protune,
manual kontrol white balance dan lain - lain.
g. Didukung 12-megapixel
Kecepetan menembak pada 30 fps dan time-lapse recording pada 0,5,, 1 2, 5, 10, 30 atau 60 interval kedua.
h. Hero3 juga mendukung gambar
dalam video, yang
memungkinkan Anda untuk
secara bersamaan menangkap video dan foto.
i. Baterai kamera adalah 1050 mAh rechargeable lithium-ion baterai.
Gambar 2. GoPro Hero 3 Roda Omni Wheel
Roda Omni-directional adalah suatu roda unik karena memiliki kemampuan bergerak bebas dua arah. Roda ini berputar seperti roda
pada umumnya serta mampu
bergeser kesamping menggunakan roda di sepanjang lingkar luar roda. Roda Omni-directional memungkinkan robot untuk mengkonversi dari robot nonholonomic untuk robot holonomic. Sebuah robot non-holonomic yang menggunakan roda normal hanya memiliki 2 DOF (Degree of Freedom) yang terkendali, yaitu bergerak maju / mundur dan rotasi. Robot non-holonomic tidak memiliki kemampuan untuk bergerak kesamping kiri / kanan sehingga membuat robot lebih lambat dan kurang efisien dalam mencapai tujuan yang diberikan. Roda
omni-directional holonomic mampu
mengatasi masalah ini karena roda memiliki 3 DOF. Berbeda dengan robot non-holonomic normal, robot omni-directional holonomic mampu bergerak ke segala arah tanpa mengubah arah roda. Roda omni-directional holonomic dapat bergerak maju mundur, geser ke samping, dan
berputar pada posisi tetap.
Kemampuan ini memungkinkan robot yang menggunakan omnidirectional mampu bergerak ke banyak arah.
Meskipun omniwheels mampu gerakan di berbagai arah, mereka
tidak benar omni-directional roda,
klasifikasi disediakan untuk roda bulat seperti unit transfer bola. Bentuk fisik dari roda dapat dilihat pada gambar 3.
Gambar 3. Roda Omni (omniwheel) HobbyKing 2.4Ghz 6CH Tx & Rx V2 (Mode 2)
Hobbykings sistem T6A 2.4GHz
adalah entry level transmitter
menawarkan keandalan teknologi
sinyal 2.4Ghz dan receiver dengan 6 saluran. Pemancar ini membutuhkan PC untuk memodifikasi salah satu
variabel channel termasuk
pencampuran dan membalikkan
putaran servo. Bentuk dari HK T6A V2 6CH 2.4Ghz ini dapat dlihat pada gambar 4
Gambar 4. HK T6A 6CH 2.4Ghz V2 HK T6A 6CH 2.4Ghz ini memiliki berbagai fitur seperti 6-channel 2.4GHz pemancar dengan servo
reversing. Mudah untuk menggunakan kontrol untuk model dasar. Termasuk 6-channel receiver Trainer sistem pilihan. Sistem ini harus diprogram
melalui kabel PC. HK T6A
menggunakan system FHSS untuk teknik komunikasinya.
Transmitter Parameter
Transmitter HK T6A 2.4Ghz V2 memiliki beberapa parameter. Adapun parameter tersebut adalah sebagai berikut : Channel : 6 Frekuensi Band : 2.4 Ghz Power Resource : 9 V – 12 V Program Type : GFSK Modulation Type : FM RF Power : 19 db Static Current : ≤ 250 mA Receiver Parameter Receiver HK T6A 2.4Ghz V2 juga memiliki beberapa parameter. Parameter tersebut adalah sebagai berikut : Channel : 6 Frekuensi Band : 2.4 Ghz Power Resource : 4.8 V – 6 V Program Type : GFSK Modulation Type : FM RF Receiver Sensitivity : -76 db Static Current : ≤ 85 mA Motor Servo
Berbeda dengan motor DC dan motor Stepper, motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan. kembali ke rangkaian kontrol yang ada di
dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Dibawah ini gambar 5 yaitu gambar dari motor servo.
Gambar 5. Motor Servo
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari
sumbu motor servo diatur
berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Motor DC
Motor DC merupakan perangkat yang berfungsi merubah besaran
listrik menjadi besaran mekanik.
Prinsip kerja motor didasarkan pada
gaya elektromagnetik. Motor DC
bekerja bila mendapatkan tegangan searah yang cukup pada kedua
kutupnya. Tegangan ini akan
menimbulkan induksi elektromagnetik yang menyebabkan motor berputar. Pada umumnya, motor diklasifikasikan
menurut jenis power yang digunakan
dan prinsip kerja motor. HASIL DAN PEMBAHASAN Kerangka Kerja
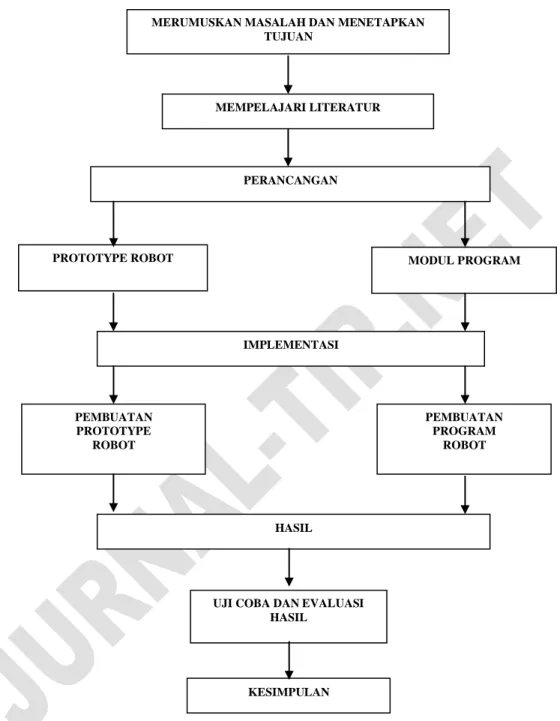
Adapun tahapan kerja yang akan dilalui pada penelitian ini dapat dilihat pada gambar 6.
Gambar 3.1 Kerangka Kerja
Gambar 6. Kerangka Kerja Penelitian Dari gambar 6. dapat dijelaskan
tahapan pelaksanaan penelitian yaitu
dimulai dengan melakukan
perumusan dan menetapkan tujuan
penelitian, kemudian dilanjutkan
dengan melakukan peninjauan
pustaka untuk mendukung analisa masalah yang akan dilakukan.
Tahapan berikutnya dalam
penelitian ini yaitu perancangan yang dimulai dari perancangan prototype robot seperti merancang mekanik robot beroda dengan menggunakan
HASIL
KESIMPULAN UJI COBA DAN EVALUASI
HASIL IMPLEMENTASI PROTOTYPE ROBOT PEMBUATAN PROGRAM ROBOT PEMBUATAN PROTOTYPE ROBOT MODUL PROGRAM MERUMUSKAN MASALAH DAN MENETAPKAN
TUJUAN
MEMPELAJARI LITERATUR
roda omni, merancang mekanik yang tepat agar kamera dapat bergerak ke
segala arah, merancang logika –
logika program yang dapat diterapkan untuk proses pengontrolan pada robot tersebut dari remote control yang telah disediakan.
Pada tahap implementasi,
dilakukan pembuatan robot dan
pembuatan program, dimana
pembuatan program menggunakan bahasa pemrograman C dengan software codevision AVR.
Setelah pembuatan robot
selesai akan dilakukan ujicoba mini robot ke beberapa kondisi ruangan
yang memiliki tingkat kesulitan
penjelajahan yang berbeda – beda.
Dari hasil ujicoba, selanjutnya
dievaluasi untuk kemudian dilakukan
perbaikan – perbaikan jika terdapat
kekurangan atau ketidak sempurnaan,
kemudian kemudian akan didapatkan
kesimpulan dari penelitian yang
dilakukan.
Context Diagram
Sub bab ini merupakan
penjabaran setiap external entity
secara keseluruhan yang
digambarkan melalui context diagram.
Context diagram merupakan
pendefenisian terhadap sistem yang
akan dirancang yang bersifat
menyeluruh. Context diagram ini
digunakan untuk memudahkan dalam proses penganalisaan sistem yang dirancang secara keseluruhan.
Context diagram berfungsi
sebagai media, yang terdiri dari suatu
proses dan beberapa buah external
entity. Context diagram yang
dimaksud dapat dilihat pada gambar 6.
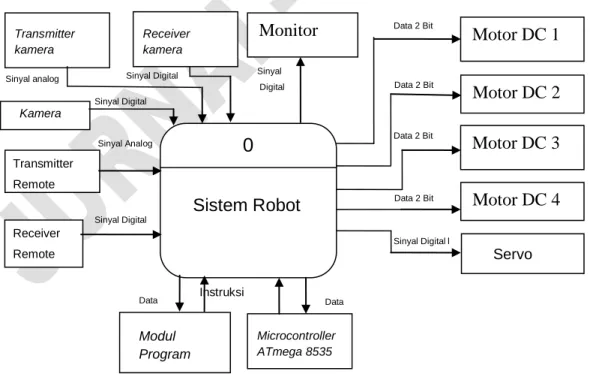
Gambar 7. Context Diagram
Sistem Robot
0
Transmitter Remote Receiver Remote Microcontroller ATmega 8535 Sinyal Analog Data Instruksi Sinyal Digital Data Transmitter kamera Receiver kamera KameraMonitor
Data 2 BitData 2 Bit
Data 2 Bit
Data 2 Bit
Sinyal Digital l Sinyal analog Sinyal Digital Sinyal
Digital Sinyal Digital Modul Program Servo
Motor DC 4
Motor DC 3
Motor DC 2
Motor DC 1
Sistem ini berinteraksi dengan
beberapa entity yaitu transmitter,
receiver, kamera, transmitter kamera, receiver kamera, Motor DC, servo,
modul program, mikrokontroler
ATmega 8535, dan monitor.
Selanjutnya entity-entity tersebut akan dibahas dibawah ini sebagai berikut :
1. Transmitter
Transmitter HK T6A berfungsi
sebagai input untuk memberikan
instruksi arah gerak motor DC melalui receiver.
2. Receiver
Receiver HK T6A berfungsi
sebagai penerima sinyal dari
transmitter dan mengirimkan
logika ke ATmega 8535.
3. Modul Program
Sarana pengolahan data dan
instruksi dari entity input
kemudian diproses sesuai
dengan logika yang digunakan, hasil dari proses tersebut akan dikirimkan ke entity output. Dalam hal ini program yang mengendalikan Robot adalah
bahasa pemograman C
menggunakan software Code
Vision AVR.
4. Mikrokontroler ATMEGA 8535
Mikrokontroler ATmega 8535
merupakan pengendali dari
Robot. Pada mikrokontroler
berisi logika program, dan
menerima sinyal input dari
receiver, dan memberikan
instruksi-instruksi berupa sinyal
melalui pin-pin output.
Mikrokontroler mengontrol
semua proses yang terjadi pada sistem.
5. Kamera
Kamera diletakkan pada robot yang berfungsi untuk melihat keadaan sekitar robot.
6. Transmitter Kamera
Transmitter kamera berguna
untuk mengirimkan gambar yang ditangkap kamera ke receiver kamera.
7. Receiver Kamera
Receiver berguna untuk
menerima sinyal dari transmitter kamera dan di lanjutkan ke monitor.
8. Motor DC 1, 2, 3, dan 4
Motor dc merupakan actuator pada robot yang dipasang pada roda omni. Dengan instruksi yang diberikan pada motor maka robot dapat bergarak sesuai dengan konsep holonomic.
9. Servo
Servo berfungsi sebagai
penggerak pada kamera
sehingga kamera dapat
digerakkan sesuai keinginan
user. 10. Monitor
Monitor digunakan sebagai output untuk menampilkan gambar atau
video yang ditangkap oleh
kamera. Blok Diagram
Berikut ini merupakan bentuk blok diagram dari robot dengan konsep holonomic :
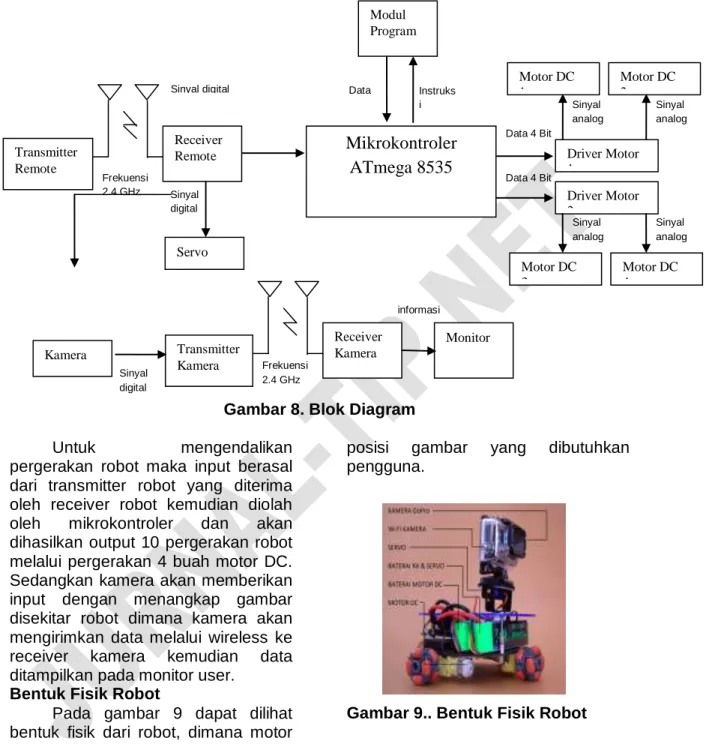
Gambar 8. Blok Diagram
Untuk mengendalikan
pergerakan robot maka input berasal dari transmitter robot yang diterima oleh receiver robot kemudian diolah
oleh mikrokontroler dan akan
dihasilkan output 10 pergerakan robot melalui pergerakan 4 buah motor DC. Sedangkan kamera akan memberikan input dengan menangkap gambar disekitar robot dimana kamera akan mengirimkan data melalui wireless ke
receiver kamera kemudian data
ditampilkan pada monitor user. Bentuk Fisik Robot
Pada gambar 9 dapat dilihat bentuk fisik dari robot, dimana motor DC diposisikan pada bagian dasar robot untuk memutar roda omni sehingga robot dapat bergerak ke segala arah, untuk mengambil gambar
kamera GoPro diposisikan pada
bagian atas robot dan dibawah kamera terdapat servo yang dapat dikontrol untuk mengarahkan kamera ke atas atau ke bawah sesuai dengan
posisi gambar yang dibutuhkan
pengguna.
Gambar 9.. Bentuk Fisik Robot Logika Program
Pada sub bab ini diuraikan logika program untuk Robot dengan menggunakan Bahasa Pemograman C. Dalam program ini terbagi kedalam beberapa sub-sub program yang mempunyai fungsi-fungsi tersendiri.
Sinyal digital
Mikrokontroler
ATmega 8535
Modul Program Data Instruks i Motor DC 1 Driver Motor 1 Motor DC 2 Data 4 Bit Sinyal analog Sinyal analog Driver Motor 2 Motor DC 3 Motor DC 4 Data 4 Bit Sinyal analog Sinyal analog Sinyal digital Servo Transmitter Remote Receiver Remote Frekuensi 2.4 GHz Transmitter Kamera Receiver Kamera Kamera Monitor Sinyal digital informasi Frekuensi 2.4 GHza. Program gerak maju If ((adc(0)>=150)&&(adc(1)<150)&&( adc(2)<150)&&(adc(3)<150)&&(ad c(4)<200)) { PORTC=0x11;
// Motor 1 cw dan motor 3 ccw
OCR0=0; OCR1A=0; OCR2=adc(0); }
b. Program gerak mundur if ((adc(0)<150)&&(adc(1)>150)&&(a dc(2)<150)&&(adc(3)<150)&&(adc (4)<200)) { PORTC=0x22; // Motor 1 ccw dan motor 4 OCR0=0; OCR1A=0; OCR1B=adc(1); OCR2=adc(1); }
c. Program gerak geser kiri if ((adc(0)<150)&&(adc(1)<150)&&(a dc(2)>150)&&(adc(3)<150)&&(adc (4)<200)) { PORTC=0x44; // Motor 2 ccw dan motor 4 cw OCR0=adc(2); OCR1A=adc(2); OCR1B=0; OCR2=0; }
d. Program gerak geser kanan if ((adc(0)<150)&&(adc(1)<150)&&(a dc(2)<150)&&(adc(3)>150)&&(adc (4)<200)) { PORTC=0x88; //
Motor 2 cw dan motor 4 ccw OCR0=adc(3); OCR1A=adc(3); OCR1B=0; OCR2=0; }
e. Program gerak serong kiri atas if ((adc(0)>150)&&(adc(1)<150)&&(a dc(2)>150)&&(adc(3)<150)&&(adc (4)<200)) { PORTC=0x55; // Motor1=cw,M2=ccw,M3=ccw, M4=cw OCR0=adc(2); OCR1A=adc(2); OCR1B=adc(0); OCR2=adc(0); }
f. Program gerak serong kanan bawah if ((adc(0)<150)&&(adc(1)>150)&&(a dc(2)<150)&&(adc(3)>150)&&(adc (4)<200)) { PORTC=0xAA; // M1=ccw,M2=cw,M3=cw,M4=c cw
OCR0=adc(3); OCR1A=adc(3); OCR1B=adc(1); OCR2=adc(1); }
g. Program gerak serong kiri bawah if ((adc(0)<150)&&(adc(1)>150)&&(adc( 2)>150)&&(adc(3)<150)&&(adc(4)<20 0)) { PORTC=0x66; // M1=ccw,M2=ccw,M3=cw,M4=c w OCR0=adc(2); OCR1A=adc(2); OCR1B=adc(1); OCR2=adc(1); }
h. Program gerak serong kanan atas if ((adc(0)>150)&&(adc(1)<150)&&(adc( 2)<150)&&(adc(3)>150)&&(adc(4)<20 0)) { PORTC=0x99; // M1=cw,M2=cw,M3=ccw,M4=c cw OCR0=adc(3); OCR1A=adc(3); OCR1B=adc(0); OCR2=adc(0); }
i. Program gerak putar kanan
if ((adc(0)>150)&&(adc(1)<150)&&(adc( 2)<150)&&(adc(3)<150)&&(adc(4)>20 0)) { PORTC=0x92; // M1=cw,M2=stop,M3=cw,M4=c w OCR0=adc(4); OCR1A=adc(4); OCR1B=adc(4); OCR2=adc(4); }
j. Program gerak putar kiri if ((adc(0)>150)&&(adc(1)<150)&&(a dc(2)<150)&&(adc(3)<150)&&(adc (4)<200)) { PORTC=0x61; // M1=ccw,M2=stop,M3=ccw,M4 =ccw OCR0=data6; OCR1A=data6; OCR1B=data6; OCR2=data6; } KESIMPULAN
Pengujian sistem dilakukan
dengan pengujian robot pada lokasi – lokasi yang sulit dicapai oleh manusia, seperti pengambilan data ke dalam gua dan pengambilan data kedalam terowongan.
Penelusuran gua dan
terowongan menjadi salah objek
lokasi pengujian sistem karena
kegiatan penelusuran gua dan
terowongan untuk mendapatkan data dan informasi didalamnya mempunyai
resiko yang sangat tinggi jika
dilakukan oleh manusia secara
langsung, seperti kejatuhan, tersesat, dehidrasi, gigitan binatang berbisa, kekurangan oksigen, kurang terampil dalam penguasaan alat bantu yang
digunakan juga sangat membahayakan selain itu terdapat faktor tak terduga seperti runtuhan atap dan dinding gua atau terowongan
karena gempa, belum lagi
kemungkinan adanya gas beracun
didalamnya. Hal ini disebabkan
karena gua mempunyai medan yang berbeda dengan yang dihadapi sehari – hari.
Gambar 10. Hasil pengambilan gambar pada gua
Gambar 11. Hasil pengambilan gambar pada terowongan
Pada gambar 10 dan 11 dapat dilihat hasil pengambilan gambar oleh robot yang dikontrol dari jarak jauh, pada gambar 10 walaupun intensitas pencahayaan disekitar robot rendah tetapi gambar yang didapatkan terlihat jelas sehingga data atau informasi
yang dibutuhkan dari lokasi ini bisa didapat dengan baik. Selain itu pada gambar 11 pengambilan gambar pada
lokasi yang sempit juga dapat
dilakukan dengan baik.
Dari hasil pengujian sistem
diatas dapat ditarik kesimpulan,
dengan penggunaan omni wheel robot dapat bergerak ke segala arah sehingga gambar dapat diambil dari sisi mana saja dan pemilihan GoPro 3 sebagai media input gambar dapat memberikan hasil yang maksimal
karena gambar yang dihasilkan
sangat baik meskipun diambil dari jarak jauh dan pada kondisi intensitas cahaya yang rendah, sehingga akan sangat membantu pengguna/peneliti yang membutuhkan data pada lokasi yang berbahaya dan sulit dijangkau. DAFTAR PUSTAKA
[1] Atmel. 1997. Flash Microcontroller
Architectural Overview. Atmel Inc,
Http://www.atmel.com, USA.
[2] Atmel. 1997. ATMEGA8535
Series Hardware Description,
Atmel Inc., Http://www.atmel.com, USA.
[3] Bishop, Owen, 2002,
Dasar-Dasar Elektronika, PT. Erlangga,
Jakarta.
[4] Douglas R. Malcolm Jr. 1985.
Robotics An Introduction. Breton
Publishers, Boston.
[5] D. Sharon, J. Harstein. 1985.
Robot dan Otomasi industry.
[6] Ibrahim, K.F. dan Santosa
Insap.1996. Teknik Digital,
Penerbit ANDI, Yogyakarta. [7] K. S. Fu, et all. 1999. Robotics
Intelegence. McGraw-Hill International.
[8] Lab. Mikroprosesor Tim. 2007.
Pemrograman Mikrokontroler
AT89S51 dengan C/C++ dan
Assembler. Andi Offset,
Yogyakarta.
[9] Peter R. Rony et all. 1985.
Introduction to Robot
Programming in Basic. Reston
Publishing
[10] Winoto Ardi. 2008. Mikrokontroler AVR Atmega8/32/16/8535 dan
Pemrogramannya dengan
Bahasa C pada WinAVR.
Informatika, Bandung. http://hanifahblog.wordpress.com http:// www.informatika.lipi.go.id http://www.scribd.com http://bustanularf.edublogs.org http://ilmucomputer2.blogspot.com http://dasarelektronik.blogspot.com