-80- copyright @ DTE FT USU
STUDI PENGARUH TEGANGAN SUPLAI TERDISTORSI PADA KINERJA MOTOR
INDUKSI TIGA FASA
John Wesley, Ir. Syamsul Amien, M.S.
Konsentrasi Teknik Energi Listrik, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU) Jl. Almamater, Kampus USU Medan 20155 INDONESIA
e-mail: [email protected]
Abstrak
Kinerja motor induksi tiga fasa dengan catu tegangan tidak sinusoidal (terdistorsi) distudikan dalam tulisan ini. Teori motor induksi, pertama kali diberikan untuk tegangan sinusoidal. Akan dijabarkan persamaan-persamaan untuk torka, rugi-rugi, arus, dan efisiensi.Tulisan ini membahas tentang beberapa perbedaan pada berbagai tingkat distorsi tegangan suplai, torka motor, rugi-rugi, arus dan efisiensi yang dialami motor induksi. Perbedaan ini didasarkan pada harmonisa yang dominan dalam sistem yaitu orde lima sebagai urutan negatif dan orde tujuh sebagai urutan positif yang masuk kedalam motor dan memiliki pengaruh besar pada kinerja motor induksi. Torka yang dihasilkan komponen harmonisa ke 5 dan ke 7 sangat kecil sehingga hampir tidak mempengaruhi besar torka motor. THD arus stator dan arus rotor akan lebih besar dari THD tegangan. Dengan besar torka beban tertentu, THD arus rotor lebih besar dari THD arus stator. THD arus stator dan rotor akan semakin besar dengan harga torka beban semakin kecil. Sebagian besar rugi-rugi harmonisa terjadi dalam rangkaian stator terutama yang disebabkan harmonisa orde ke 5. Sedangkan efisiensi motor hampir tidak berubah untuk berbagai tingkat distorsi tegangan masuk.
Kata kunci: Torka, THD, Rugi-rugi 1. Pendahuluan
Idealnya, penyalur/penyedia tenaga listrik memberi konsumennya tenaga listrik dengan kualitas daya yang baik. Hal ini berkaitan dengan besar dan frekuensi tegangan sinusoidal konstan. Kondisi ini merupakan suatu tugas yang berat untuk menjaga kualitas daya dengan besar dan frekuensi tegangan sinusoidal konstan.
Dalam kenyataan, bentuk gelombang catu daya bolak-balik selalu mengalami penyimpangan (distorsi) akibat beban-beban tidak linier. Beban-beban tidak linier yang umum ditemukan dewasa ini adalah penggerak listrik kecepatan variabel, konverter statis, catu daya tidak terputus (UPS), komputer pribadi (PC), kompensator daya reaktip statik (SVC), mesin faksimil, televisi, dan lainnya. Beban-beban tidak linier ini menarik arus yang tidak mengikuti bentuk gelombang dari sumbernya sehingga terjadi penyimpangan. Penyimpangan bentuk gelombang akan mempengaruhi beban lain dalam jaringan yang sama, misal motor induksi tiga fasa.
Banyak studi sudah dilakukan pada motor induksi. Namun, kebanyakan studi yang dilakukan dengan asumsi tegangan suplai (catu daya) motor sinusodal. Motor induksi dirancang bekerja efisien dengan tegangan sinusoidal.
Suatu penyimpangan bentuk gelombang dari sinusoidal akan mempengaruhi kinerja motor. Bahkan mungkin mengakibatkan keadaan yang fatal bagi motor. Oleh sebab itu diperlukan studi bagaimana penyimpangan bentuk gelombang mempengaruhi kinerja motor induksi.
2. Representasi Matematik Besaran Terdistorsi.
Besaran-besaran periodik terdistorsi dapat dipandang sebagai superposisi harmonisa-harmonisa orde lebih tinggi pada komponen dasar. Gambar 1 memperlihatkan besaran teridistorsi, dimana komponen dasar bersuperposisi dengan harmonisa orde ke 7.
Gambar 1. Representasi Besaran Terdistorsi Sebagai Jumlah Dua Besaran Sinusodal. Dari Gambar 1 dapat dilihat bahwa komponen dasar adalah komponen yang paling dominan
-81- copyright @ DTE FT USU dan mempunyai frekuensi sama dengan besaran
terdistorsi. Komponen harmonisa ke 7 mempunyai frekuensi tujuh kali frekuensi dasar. Besaran sinusoidal terdistorsi dapat dinyatakan dalam bentuk deret Fourier sebagai berikut (besaran tegangan) : v(t)=a0+ 1 cos 1 1 sin 1 n an nt n bn nt (1) Dalam bentuk kompleks, deret Fourier dinyatakan dengan : v(t)=V0 + 1 1 Re 2 n t jn e n V (2) dengan : V0 = a0 = T dt t v T 0 ( ) 1 , Vn = T t d t jn e t v T 0 ( ) 1 ) ( 2
Koefisien kompleks dinyatakan dengan : Tv t e jn tdt T n j e n V n V 0 1 ) ( 2 (3) Dalam persamaan (3),
frekuensi-frekuensi sudut ω2, ω3, …., ωn yang merupakan
perkalian bilangan bulat dari ω1 digantikan
dengan nω1. Untuk komponen harmonisa
tertentu dari v(t), Vn adalah harga efektif, αn
adalah sudut fasa, dan nω1 adalah frekuensi
sudut. Bentuk 2ReV1ejn1t menyatakan komponen dasar dari v(t) dan V0 adalah
komponen dc dari v(t). Persamaan (3) menyatakan besaran satu fasa. Besaran tiga fasa dapat dinyatakan dalam cara yang sama.
Asumsikan bahwa tegangan tiga fasa vR,
vS, dan vT adalah besaran periodik simetris. Kita
dapat tulis : 3 ) (t vR t T S v ; 3 T t R v T v (4)
Harga efektif kompleks vS dari harmonisa ke n
dapat ditulis sebagai
VRn e jn VRn T jn e Sn V 1 13 1 120 (5) Karena : (6) Maka persamaan (5) dapat ditulis menjadi :
(7) Cara yang sama digunakan pula untuk mencari besar VT .
2.1 Ukuran Distorsi Tegangan Dan Arus
Distorsi tegangan atau arus biasanya dinyatakan dalam Total Harmonic Distortion (THD). THD dihitung dengan membandingkan harga efekttif kandungan harmonisa dengan harga efektif komponen dasar. Dalam bentuk persamaan : (THD)V = 1 2 2 V n Vn ;(THD)I = 1 2 2 I n In (8)
2.2 Rangkaian Ekivalen Pada Kondisi Tegangan Suplai Terdistorsi.
Pada kondisi tegangan suplai terdistorsi, rangkaian ekivalen motor akan dibentuk dari rangkaian ekivalen komponen dasar dan komponen-komponenharmonisa. Harmonisa-harmonisa dalam sistem dapat berupa urutan positif, negatif, dan nol. Dalam analisis, motor diasumsikan dicatu dari sistem tiga kawat. Oleh sebab itu komponen urutan nol tidak muncul. Oleh sebab itu tidak perlu mempertimbangkan harmonisa orde perkalian 3 (3k).
Kontribusi harmonisa-harmonisa orde genap jauh lebih kecil dibanding harmonisa-harmonisa orde ganjil. Dalam pertimbangan praktis, harmonisa-harmonisa orde genap diabaikan. Harmonisa-harmonisa yang dominan dalam sistem adalah orde 5 (urutan negatif) dan orde 7 (urutan positif). Hanya harmonisa-harmonisa orde 5 dan 7 yang akan dinalisis pengaruhnya. Rangkaian ekivalen komponen dasar, harmonisa orde 5, dan orde 7 diperlihatkan dalam Gambar 2.
-82- copyright @ DTE FT USU (b) Orde 5
(c) Orde 7
Gambar 2. Rangkaian Ekivalen Per Fasa Motor Induksi.
2.2.1 Analisis Kinerja Motor
Analisis hanya dilakukan untuk harmonisa orde 5 dan 7 sebagai tambahan terhadap komponen dasar. Harmonisa orde 5 menghasilkan medan putar dengan kecepatan 5 kali kecepatan rotor tetapi dalam arah berlawanan. Sedangkan harmonisa orde 7 menghasilkan medan putar dengan kecepatan 7 kali kecepatan rotor tetapi dalam arah sama. Slip komponen dasar adalah :
s1 = 1 1
r = 11
r
(9) Slip untuk komponen harmonisa orde 5 adalah : s5 = 1 5 1 1 5 1 5 5 5 r r r (10) Slip untuk komponen harmonisa orde 7 adalah : s7 = 1 1 1 7 77
1
7
7
r r r
(11) Andaikan 1
r hK
(12) Persamaan-persamaan (9), (10), dan (11) dapat ditulis menjadi hK
s
1
1
;5
1
5 hK
s
;7
1
7 hK
s
(13) 2.2.2 TorsiDaya celah udara total dinyatakan dengan :
7 5 1 g g g g P P P P (14)
Daya celah udara total merupakan penjumlahan daya celah udara komponen dasar dan komponen-komponen harmonisa. Torka dinyatakan dengan: s g
P
T
(15) Torka bergantung daya celah udara dan kecepatan sinkron. Setiap komponen daya celah udara akan menghasilkan torka. Torka total yang dihasilkan motor diperoleh dengan menjumlahkan torka yang dihasilkan setiap komponen daya celah udara.7 5 1
T
T
T
T
(16) . 2.2.3 Arus RotorDari Gambar 2(a), kuadrat harga efektif arus rotor frekuensi dasar dapat didekati dengan persamaan 2 2 1 2 1 2 1 r r X s R V I (17)
Kuadrat harga efektif arus harmonisa orde 5 dan 7 masing-masing dinyatakan dengan
2 2 5 2 5 2 5 5 r r X s R V I (18)
2 2 7 2 7 2 7 7 r r X s R V I (19)Arus rotor frekuensi dasar dan arus harmonisa orde 5 dan orde 7 bergantung tegangan stator dan impedansi rotor. THD arus dihitung dari persamaan : (THD)I = 1 2 7 2 5 I I I = 2 2 1 2 1 2 7 2 7 2 7 2 5 2 5 2 5 r X s r R V r X s R V r X s r R V (20) 2.2.4 Rugi-Rugi
Jika rugi-rugi dalam rangkaian stator diabaikan, rugi karena arus komponen dasar adalah
-83- copyright @ DTE FT USU ΔP1=s1Pg1=
2 2 1 2 1 3 r r r X s R V R (21)Rugi-rugi yang terjadi karena arus harmonisa orde 5 dan orde 7, masing-masing dinyatakan dengan : ΔP5=s5Pg5=
2 2 5 2 5 5 3 r r r X s R V R (22) ΔP7=s7Pg7=
2 2 7 2 7 7 3 r r r X s R V R (23)Rugi-rugi total adalah :
ΔP=ΔP1+ΔP5+ΔP7 (24)
Harmonisa orde 5 adalah komponen urutan negatif. Seluruh energi yang dipindahkan melalui celah udara oleh komponen ini akan menjadi rugi-rugi. Rugi-rugi dapat dihitung bila harga slip pada besar torka tertentu diketahui. 2.2.5 Efisiensi
Efisiensi motor dapat dihitung sebagai berikut :
7 5 1 7 7 1 1 1 1 g g g g g in o P P P P s P s P P
(25) 3. Metodologi PenelitianMetodologi penelitian yang digunakan dalam tulisan ini adalah simulasi perhitungan. Langkah awal untuk simulasi perhitungan adalah membentuk model/persamaan-persamaan matematik untuk torka, arus, rugi-rugi, dan
efisiensi yang sudah dilakukan
sebelumnya.Simulasi dilakukan untuk berbagai tingkat distorsi tegangan. THD tegangan masuk ke motor akan diatur besarnya dari 0% sampai 10% dalam selang 2%. Data-data motor akan diambil dari daftar pustaka yang digunakan. Hasil simulasi perhitungan akan dianalisis sehingga diperoleh informasi seberapa besar pengaruh ketidak seimbangan tegangan pada kinerja motor induksi. Diagram alir proses perhitungan diperlihatkan dalam Gambar 3.
MULAI
BACA PARAMETER : f, p, V, Nr, P, Rs, Xs, Rc, Xm, Rr, Xr
HITUNG HARGA NOMINAL : SLIP, KECEPATAN SINKRON, TORKA
TENTUKAN : THD TEGANGAN, Nr, TL
HITUNG :
SLIP DAN IMPEDANSI HARMONISA
HITUNG :
TORKA TOTAL, ARUS, RUGI-RUGI, EFISIENSI
Gambar 3. Diagram Alir Proses Perhitungan.
4. Hasil Dari Simulasi Perhitungan Data-Data Motor
Data-data motor yang digunakan dalam simulasi perhitungan ditunjukkan oleh Tabel 1:
Tabel 1 Data Motor
Dari data-data motor, slip nominal dan torsi nominal motor dihitung sebagai berikut dan kurva torsi ditunjukan oleh Gambar 4 :
1500
1450
1500
s r s nN
N
N
s
0,033m
N
x
x
N
x
P
T
r n n34
,
4
.
1450
55
,
9
746
3
,
7
55
,
9
Gambar 4. Kurva Torsi-Kecepatan Motor 7,3 HP
-84- copyright @ DTE FT USU Tabel 2. Torsi Motor Pada Berbagai Harga THD
Tegangan
Tabel 2 memperlihatkan torsi motor pada berbagai harga THD tegangan. Torsi motor merupakan fungsi tegangan (berbanding lurus) dan impedansi ekivalen motor (berbanding terbalik). Besar tegangan harmonisa paling tinggi hanya 10% dari tegangan nominal (22 volt) dan impedansi ekivalen motor untuk harmonisa ke 5 dan ke 7 akan lebih besar dari impedansi frekuensi dasar. Dengan tegangan harmonisa lebih kecil dan impedansi lebih besar, torsi motor harmonisa ke 5 dan ke 7 akan sangat kecil.
Tabel 3. Arus Motor Pada Berbagai Harga THD Tegangan
Tabel 3 memperlihatkan besar arus stator dan arus rotor untuk berbagai harga THD tegangan dan hasil berupa kurva ditunjukan Gambar 5. Untuk besar torsi konstan tertentu, arus komponen dasar, arus hamonisa ke 5, dan arus harmonisa ke 7 konstan. Sebagai contoh, dengan TL = 32 N.m, arus stator frekuensi dasar
konstan sebesar 9,659 ampere dan arus rotor frekuensi dasar konstan sebesar 8,507 ampere. Ini dimungkinkan karena torsi yang dihasilkan oleh komponen-komponen harmonisa dapat diabaikan.
Gambar 5 THD Arus Fungsi THD Tegangan Tabel 4. Rugi-Rugi Motor Untuk Berbagai
Harga THD Tegangan
Tabel 4 memperlihatkan bahwa rugi-rugi karena frekuensi dasar dalam rangkaian stator (ΔPsf) dan rangkaian rotor (ΔPrf) untuk besar
torsi beban tertentu besarnya konstan. Sebagian besar rugi-rugi harmonisa terjadi dalam rangkaian stator terutama yang disebabkan harmonisa orde ke 5 (ΔPsh5).
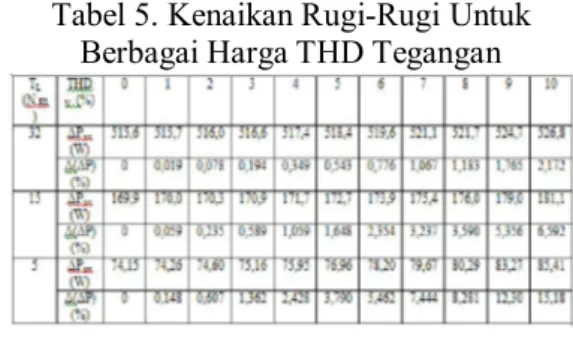
Tabel 5. Kenaikan Rugi-Rugi Untuk Berbagai Harga THD Tegangan
-85- copyright @ DTE FT USU Tabel 5 memperlihatkan kenaikan rugi-rugi
yang disebabkan oleh harmonisa. Dari Tabel 5 dapat dilihat bahwa kenaikan rugi-rugi akan lebih besar pada harga torsi beban lebih rendah. Pada THD tegangan sebesar 10% dan torsi beban sebesar 5N.m, kenaikan rugi-rugi sebesar 15,8%
Tabel 6. Hubungan Daya Dalam Motor Pada Berbagai Harga THD Tegangan
Hubungan daya masuk, rugi-rugi stator, daya celah udara, dan daya keluaran hasil simulasi perhitungan diperlihakan dalam Tabel 6. Dari Tabel 6 dapat dilihat bahwa daya masuk frekuensi dasar (Pinf), rugi-rugi stator frekuensi
dasar (ΔPsf), dan daya celah udara frekuensi
dasar (Pgf) berharga konstan. Daya masuk karena
komponen harmonisa (Pinh) semakin besar
dengan kenaikan THD tegangan. Tetapi besarnya kecil dibanding dibandingkan daya masuk frekuensi dasar. Sebagian besar daya masuk karena komponen harmonisa hilang sebagai rugi-rugi dalam stator (ΔPsht) dan hanya
sebagian kecil melalui celah udara (Pgh
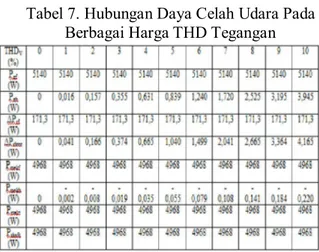
Tabel 7. Hubungan Daya Celah Udara Pada Berbagai Harga THD Tegangan
Tabel 7 memperlihatkan hasil simulasi perhitungan daya dalam celah udara, daya mekanik, dan daya poros untuk berbagai harga THD tegangan. Dari Tabel 7 dapat dilihat bahwa daya mekanik karena komponen harmonisa
bertanda negatif. Ini artinya daya mekanik komponen harmonisa ke 5 (urutan negatif) lebih dominan dibandingkan daya mekanik komponen harmonisa ke 7 (urutan positif).
5. Kesimpulan
Dari analisis hasil simulasi dapat disimpulkan sebagai berikut:
1.Torka yang dihasilkan komponen harmonisa ke 5 dan ke 7 sangat kecil sehingga hampir tidak mempengaruhi besar torka motor. 2. Besar arus harmonisa ke 5 dan ke 7 kecil
dibandingkan arus frekuensi dasar baik di stator maupun di rotor. Tetapi dengan torka beban lebih kecil, besar arus harmonisa tidak dapat diabaikan.
3. THD arus stator dan arus rotor akan lebih besar dari THD tegangan. Dengan besar torka beban tertentu, THD arus rotor lebih besar dari THD arus stator. THD arus stator dan rotor akan semakin besar dengan harga torka beban semakin kecil.
4. Rugi-rugi karena frekuensi dasar dalam rangkaian stator dan rangkaian rotor untuk besar torka beban tertentu, besarnya konstan. Sebagian besar rugi-rugi harmonisa terjadi dalam rangkaian stator terutama yang disebabkan harmonisa orde ke 5.
5.Efisiensi motor hampir tidak berubah untuk berbagai tingkat distorsi tegangan masuk. 6. Daftar Pustaka
1. William Hayt. 2005. Rangkaian Listrik Jilid 1 & 2 Edisi VI.Erlangga
2. Enrique Quispe. Influence Of Unbalance And Waveform Voltage On Performance Characteristics Of Three Phase Induction Motors. Universidad Autonoma de Accidente, Cali.
3. Mochtar Wijaya.2000. Dasar-Dasar Mesin Listrik.Erlangga.Jakarta
4. MathWorks. 2013. Getting Started Guide MATLAB&SIMULINK R2013a. The MathWork, Inc.
5. S.J. Chapman. 1999. Electric Machinery Fundamentals. McGraw-Hill.
6. Widiarsono T, M.T. 2005. Tutorial Praktis BELAJAR MATLAB.