OBJECT TRACKING
Gigih Samudera; Jirio; Okky; Iman H. Kartowisatro
Computer Engineering Department, Faculty of Engineering, Binus University Jln. K.H. Syahdan No. 9, Palmerah, Jakarta Barat 11480
[email protected]; [email protected]; [email protected]; [email protected]
ABSTRACT
Visual servoing technology supports the development of world science and technology, especially in robotics science and industry. The purpose of this research is to design an object tracking system on the arm of robot RV-M1. The system uses visual servoing technology so it can find objects and get to the position of the objects (in this case the circles and squares) in some sort of light intensity and tolerance, which is expected to be useful in object detection system or other applications. The method used is to find the centroid (the center of mass) of an object and compared to the center of the frame (vision sensor). The ability to perform tracking system is between 23.5 to 52.5 lux with a limit of accuracy (tolerance) varies from 5mm to 1 mm. Bad lighting conditions which is too dark or too bright causes errors in object capturing so that the system can not do the tracking. The manipulator precision to the object is considered precised adjusted to the tolerance limits given. In other words, the smaller the tolerance given or even no tolerance given which is the ideal condition, the higher the accuracy level of manipulator will be, in spite of the lower speed of manipulator in response to the object.
Keywords: visual servoing, object tracking, toleransi, intensitas cahaya, centroid, arm robot RV-M1
ABSTRAK
Teknologi visual servoing merupakan salah satu faktor yang menunjang perkembangan dunia pengetahuan dan teknologi, terutama pada bidang ilmu pengetahuan robotika dan perindustrian. Tujuan dari penelitian ini adalah merancang sebuah sistem Object Tracking pada arm robot RV-M1. Sistem ini menggunakan teknologi visual servoing sehingga dapat menemukan objek dan menuju ke posisi objek (dalam hal ini adalah lingkaran dan kotak) dalam beberapa jenis intensitas cahaya dan toleransi, yang diharapkan dapat berguna dalam sistem pendeteksian objek ataupun aplikasi lainnya. Metode yang digunakan adalah dengan menemukan centroid (titik pusat massa) objek dan dibandingkan dengan titik pusat frame (sensor vision). Kemampuan sistem dalam melakukan tracking adalah antara 23,5 lux sampai 52,5 lux dengan batas ketelitian (toleransi) bervariasi dari 5mm sampai 1 mm. Kondisi pencahayaan yang kurang dan terlalu terang menyebabkan kesalahan dalam penangkapan objek sehingga sistem tidak dapat melakukan tracking. Ketepatan manipulator terhadap objek dapat dikatakan presisi disesuaikan dengan batas toleransi yang diberikan. Dengan kata lain semakin kecil toleransi yang diberikan atau kondisi ideal di mana tidak ada toleransi yang diberikan akan meningkatkan tingkat ketepatan manipulator tetapi menurunkan kecepatan manipulator dalam merespon objek.
PENDAHULUAN
Pengaplikasian visual servoing semakin banyak digunakan dalam beberapa sistem dalam kehidupan manusia terutama pada robot. Visual servoing adalah sebuah teknik yang melakukan kontrol pada robot untuk mencapai posisi yang diinginkan hanya dengan menggunakan gambar yang ditangkap kamera (F. Chaumette dan S. Hutchinson, 2006). Menurut Hutchinson, et al. (1996), visual servoing menggunakan informasi yang didapatkan dari sensor vision untuk mengontrol pergerakan dari sebuah sistem dinamis. Sensor vision yanng biasanya berupa kamera berperan penting dalam visual servoing karena sensor inilah yang akan menentukan kinerja dari robot dalam melakukan tracking. Terdapat tiga teknik dalam visual servoing yaitu position-based visual servoing, image-based visual servoing dan gabungan dari keduanya (D. Kragic dan H.I. Christensen, 2011). Position-based visual servoing yang melakukan proses dengan mengacu pada pencarian posisi objek yang dilihat dari kamera sehingga dapat diikuti pergerakkannya seperti pada percobaan visual servoing pada sebuah mobile-robot nonholonomic untuk mengikuti jalur dengan melihat bentuk jalur (A. Cherubini, F. Chaumette dan G. Oriolo, 2008). Penelitian oleh Cherubini, dkk. (2008) menggunakan sebuah garis yang tegak lurus dengan robot sebagai acuan terhadap jalur yang dilihat kamera. Perbedaan sudut antara garis acuan dengan jalur menunjukkan bahwa terdapat patahan/belokan sehingga robot harus berbelok mengikuti jalur tersebut. Image-based visual servoing melakukan proses dengan mengacu pada gambar acuan yang diberikan pada robot sehingga informasi yang didapatkan dari gambar yang ditangkap kamera dibandingkan dengan gambar yang merupakan acuan. Dalam Image-based visual servoing, sistem akan melakukan proses dengan mengurangi error distance-nya. Teknik ini biasa digunakan untuk melakukan pelacakkan terhadap objek yang telah diketahui bentuknya.
Dalam visual servoing juga terdapat berbagai metode untuk mencapai atau menemukan objek seperti mutual information based (A. Dame dan E. Maarchand, 2011) dan pose-estimation-based (H. M. Becerra dan C. Sagues, 2009). Mutual information based menggunakan informasi yang diberikan kepada sistem sehingga dapat diketahui objek yang akan dituju dengan menggunakan beberapa barisan fungsi tertentu. Informasi yang diberikan dapat berupa letak, bentuk dan hal-hal lain yang merupakan ciri-ciri dari objek. Sedangkan pose-estimation based menggunakan perkiraan pose yang akan dilakukan oleh robot untuk mencapai objek dengan melihat posisi dan orientasi. Penempatan dan jumlah sensor vision berupa kamera yang digunakan juga mempengaruhi teknik dan algoritma dalam melakukan visual servoing atau tracking. Menurut Kragic dan Christensen (2011), penempatan kamera pada sebuah sistem dapat secara eye-in-hand atau stand alone. Eye in hand adalah sebuah metode peletakkan kamera pada end effector (bagian yang menjadi ujung dari robot biasanya berupa gripper atau tools) dari robot dan stand alone adalah metode peletakkan kamera secara terpisah dari bagian tubuh robot. Dengan menggunakan metode eye in hand maka sistem akan langsung melihat objek yang akan diikuti secara langsung. Jumlah kamera dalam sistem visual servoing dapat menambahkan fitur-fitur lainnya seperti memperkirakan jarak atau untuk melihat bentuk objek secara keseluruhan.
Selain memperhatikan teknik dalam visual servoing juga diperlukan metode-metode pendukung di dalamnya, yaitu teknik untuk pengambilan gambar dengan kamera. Menurut Marchand (2007), peletakkan kamera mempegaruhi hasil gambar yang didapatkan dan pencahayaan juga dapat mempengaruhi gambar yang didapatkan dan akan diproses. Pada penelitian yang dilakukan tersebut, terdapat berbagai cara untuk mendapatkan gambar yang baik, seperti memaksimalkan cahaya, meningkatkan kontras antara objek dan latar dan teknik pengambilan.
Berdasarkan hasil pengamatan yang telah dilakukan terhadap hasil karya ilmiah yang ada, penelitian ini dibuat untuk meneliti visual servoing pada robot lengan RV-M1 (arm robot RV-M1) yang diperlengkapi dengan sensor vision (kamera web) yang dipasang pada end effector (eye in
hand). Robot lengan RV-M1,adalah sebuah robot lengan dengan lima derajat kebebasan. Metode yang digunakan adalah melakukan perhitungan centroid (titik pusat massa) objek yang ditangkap kamera untuk mengetahui posisi objek sehingga end effector RV-M1 dapat mencapai objek atau end effector berada didepan objek. Penelitian ini bertujuan untuk meneliti pengaruh intensitas cahaya, ukuran objek dan pengaruh toleransi (batas nilai error) terhadap kinerja sistem, dalam hal ini adalah jumlah loop atau iterasi yang dilakukan oleh sistem untuk mencapai objek.
METODE
Berdasarkan tujuan yang ingin dicapai, metode perancangan yang dilakukan terdiri dari beberapa proses.
Pertama, melihat dan menganalisis sistem object tracking yang akan dikembangkan secara umum. Gambaran sistem secara umum yang akan dikembangkan terdiri dari robot, kamera dan komputer di mana masing-masing komponen saling terintegrasi sehingga membentuk suatu sistem object tracking. Sistem object tracking yang dimaksud adalah sistem di mana robot dapat menemukan posisi objek yang ditaruh pada sebuah penampang atau workspace sehingga robot dapat menyesuaikan posisi end effector dari robot tersebut dengan posisi objek yang berada pada penampang tersebut. Dengan melihat sistem secara umum, penelitian difokuskan pada respon sistem terhadap ketepatan posisi end effector terhadap objek, variasi bentuk benda, dan efek iluminasi cahaya dalam ruangan. Dengan demikian, dibutuhkan adanya data-data yang sesuai dengan ruang lingkup untuk mendukung penelitian yang akan dilakukan.
Kedua, mempertimbangkan robot platform yang dibutuhkan oleh sistem Object Tracking yang akan dikembangkan. Dalam menentukan robot platform, terdapat hal-hal yang menjadi pertimbangan di mana robot yang digunakan harus dapat bergerak dalam ruang tiga dimensi dan memiliki minimal tiga derajat kebebasan sehingga robot dapat bergerak sesuai dengan sistem yang dibutuhkan yaitu dapat menghampiri objek yang diletakkan pada suatu bidang. Robot Mitsubishi MovemasterEX RV-M1 digunakan karena sistem membutuhkan pergerakkan robot dalam ruang tiga dimensi.
Ketiga, mempertimbangkan sensor yang akan digunakan. Pada sistem yang akan dibuat, kamera yang digunakan adalah kamera web biasa yang menggunakan kabel USB sehingga kamera dapat langsung terhubung ke komputer tanpa diperlukan adanya perangkat keras lainnya untuk menghubungkan kamera dengan komputer. Kamera web yang digunakan akan dipasang tepat pada ujung end effector (eye in hand).
Keempat, mempertimbangkan bahasa pemrograman yang akan digunakan.Dalam menentukan bahasa pemrograman yang akan digunakan, komunikasi antara PC dan robot menjadi salah satu faktor yang dipertimbangkan. Melihat karakteristik dari robot RV-M1 yang dapat berkomunikasi secara serial dalam pengendaliannya dan dengan melihat penelitian sebelumnya di mana bahasa pemrograman Matlab digunakan dalam pensimulasian dan perhitungan kinematik dari robot RV-M1, maka Matlab digunakan sebagai bahasa pemrograman dari sistem. Bahasa pemrograman Matlab juga memudahkan sistem dalam pemrosesan citra karena memiliki fungsi-fungsi khusus yang dapat digunakan untuk pemrosesan citra, bahasa pemrograman Matlab juga dapat mengintegrasikan langsung kamera web yang digunakan pada sistem sehingga tidak diperlukan adanya software tambahan untuk pengintegrasian kamera web dan komunikasi secara serial.
Kelima, melakukan perancangan algoritma object tracking dari sistem yang akan dikembangkan beserta kalibrasi yang dibutuhkan. Perancangan yang dibuat akan dibedakan menjadi lima bagian inti, yaitu: (1) penangkapan gambar – pada proses ini, komputer akan mengambil gambar dengan meminta snapshot gambar pada video stream; (2) pemrosesan gambar, yaitu proses mengolah gambar yang sebelumnya didapat menjadi gambar biner sehingga fitur gambar dapat lebih mudah untuk diekstrak; (3) ekstraksi fitur gambar, yaitu mengambil fitur gambar dengan mencari titik pusat massa objek yang dideteksi; (4) penentuan lokasi objek berdasarkan titik pusat massa objek; (5) perancangan algoritma kendali yang dibutuhkan sistem – dalam pengaturannya, agar sistem dapat berjalan sesuai dengan yang diinginkan, perlu adanya pengontrolan sistem. Sistem kendali yang digunakan merupakan algoritma sederhana yang menggunakan dua untaian, yaitu untaian dalam dan untaian luar. Untaian dalam berfungsi untuk menjaga agar sistem berhenti ketika sistem telah mencapai batas toleransi yang telah ditentukan, sedangkan untaian luar berfungsi untuk memastikan pergerakkan lengan robot ketika tidak ada objek yang terdeteksi pada view area dari kamera.
Diagram Alir
Diagram alir sistem secara keseluruhan dapat dilihat pada Gambar 1 yang menjelaskan alur program secara detil. Sistem diawali dengan inisialisasi perangkat yang dibutuhkan seperti kamera, streaming video dan komunikasi serial. Kemudian PC akan meminta snapshot dari video stream yang kemudian gambar yang didapat akan dicek apakah terdapat objek pada gambar yang ditangkap. Jika tidak ada objek yang terdeteksi pada gambar, sistem akan masuk outer loop yang akan menggerakkan robot ke kanan dan kiri robot hingga terdeteksi adanya objek pada gambar yang ditangkap. Jika sampai akhir robot tidak menemukan adanya objek, sistem akan berhenti. Jika terdeteksi adanya objek pada gambar, sistem akan masuk ke dalam inner loop yang akan memproses gambar hingga mendapatkan titik pusat massa dari objek yang terdeteksi dan kemudian titik pusat massa objek akan dihitung selisihnya dengan titik pusat gambar yang ditangkap untuk memberikan perintah menggerakkan robot sesuai dengan selisih yang didapat. Sistem akan terus bergerak sampai toleransi yang ditentukan tercapai.
Diagram Blok
Diagram blok sistem dalam garis besar akan terlihat pada Gambar 2. Penelitian ini menggunakan sistem untaian tertutup yang memiliki umpan balik sebuah kamera, di mana gambar yang tertangkap kamera akan diproses pada komputer untuk dicek titik pusat massa objek yang terdeteksi, yang kemudian hasil dari perhitungan pusat massa tersebut akan menjadi perintah untuk dikirimkan ke Drive Unit (Controller) RV-M1 dan akan diteruskan ke lengan robot RV-M1, sehingga lengan robot RV-M1 dapat bergerak menghampiri objek. Jika batas toleransi untuk menyamakan titik pusat massa objek dengan titik pusat ukuran gambar yang tertangkap kamera belum terpenuhi, maka komputer akan terus melakukan proses pengecekan dan perhitungan titik pusat massa objek dengan set point yang diberikan sampai batas toleransi terpenuhi.
Gambar 1. Diagram alir object tracking.
Gambar 2. Diagram blok object tracking.
Spesifikasi Sistem
Berikut ini adalah spesifikasi sistem yang digunakan dalam penelitian ini (Tabel 1). Tabel 1. Spesifikasi sistem
Perangkat Tipe Jumlah
PC - Intel Pentium IV 2,4GHz
- Serial port (baud rate 9600 bps, COM1) Kamera
- CMOS webcam
- Frame rate up to 30 fps
- Power Supply dengan USB port - Resolusi 640x480 pixel
1
Robot - Mitsubishi RV-M1 (Gambar 3) Movemaster EX dan Drive
Unit 1
Pemrograman - MATLAB 7.1.0.246
Objek
- Latar Hitam
- Warna objek solid (kecuali hitam dan coklat) - Bentuk objek solid
Gambar 3. Robot RV-M1.
HASIL DAN PEMBAHASAN
Percobaan pada penelitian ini dilakukan untuk mengetahui pengaruh beberapa faktor terhadap kinerja sistem (jumlah loop yang terjadi). Percobaan yang dilakukan dalam penelitian ini adalah sebagai berikut: (1) percobaan jumlah pixel yang tertangkap kamera. Pengujian ini dilakukan untuk mengetahui sensitivitas sistem terhadap bagian objek yang tertangkap kamera dalam hal ini adalah jumlah pixel. Selain itu juga untuk mengetahui pengaruhnya terhadap kecepatan mencapai objek; (2) percobaan pengaruh intensitas cahaya. Pengujian intensitas cahaya dilakukan untuk mengetahui rentang atau batasan sistem dapat bekerja dalam beberapa jenis intensitas cahaya. Pengujian dilakukan dengan rentang 0,1 sampai 84,7 lux; (3) percobaan pengaruh toleransi. Pengaruh toleransi terhadap kinerja sistem dilakukan untuk mengetahui kemampuan sistem dalam melakukan tracking sehingga diketahui batasan ketelitian (toleransi) untuk mencapai objek; (4) percobaan pengaruh ukuran dan jenis objek untuk mengetahui apakah objek terpengaruh oleh ukuran dan bentuk dari objek.
Evaluasi Jumlah Pixel yang Tertangkap Kamera
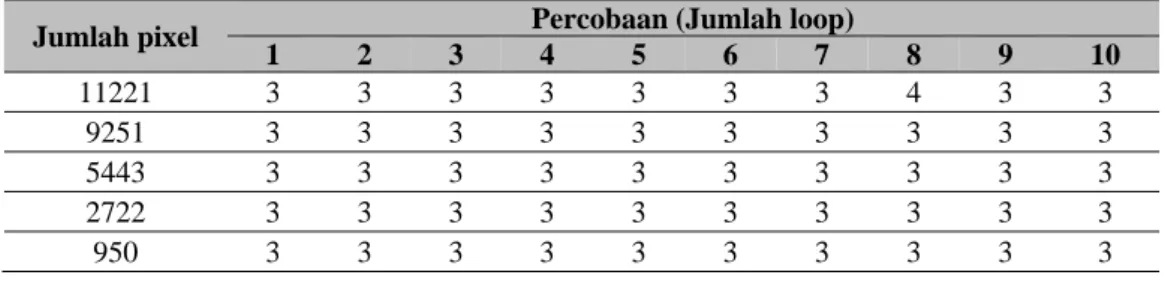
Berdasarkan hasil pengujian terhadap jumlah pixel yang tertangkap terhadap kinerja sistem, terlihat bahwa sistem tidak terpengaruh pada jumlah pixel dari objek yang ditangkap kamera. Percobaan yang dilakukan berdasarkan jumlah pixel terlihat pada Tabel 2 dan gambar
objek yang tertangkap terlihat pada Tabel 3. Selama objek masih masuk ke dalam frame kamera, objek akan dapat diikuti. Pada Gambar 4 dapat dilihat bahwa terdapat sedikit error saat percobaan ke-8 dari 10 percobaan yang dilakukan, hal ini mungkin dikarenakan kondisi kesalahan pembacaan sensor. Selama sebagian dari objek masih tertangkap kamera maka sistem akan dapat melakukan tracking. Hal ini dikarenakan sistem masih dapat menghitung centroid dari objek.
Tabel 2. Pengaruh jumlah pixel yang tertangkap kamera terhadap Kinerja Sistem
Jumlah pixel Percobaan (Jumlah loop)
1 2 3 4 5 6 7 8 9 10 11221 3 3 3 3 3 3 3 4 3 3 9251 3 3 3 3 3 3 3 3 3 3 5443 3 3 3 3 3 3 3 3 3 3 2722 3 3 3 3 3 3 3 3 3 3 950 3 3 3 3 3 3 3 3 3 3
Tabel 3. Gambar yang ditangkap kamera
Jumlah Pixel 11221 9251 5443 2722 950 Gambar yang ditangkap kamera
Gambar 4. Grafik jumlah pixel yang tertangkap kamera terhadap kinerja sistem.
Evaluasi Pengaruh Intensitas Cahaya
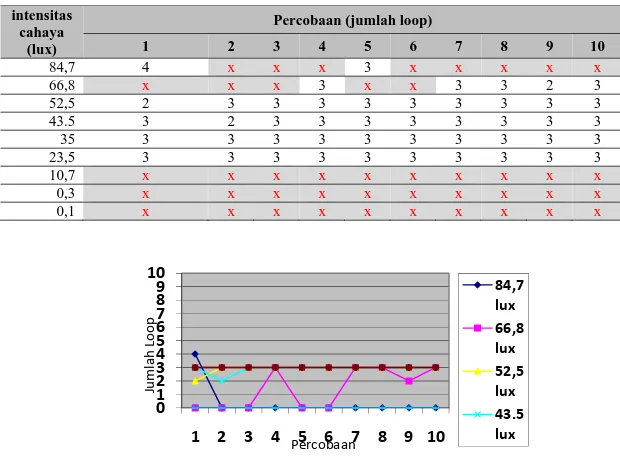
Berdasarkan hasil analisis pengaruh intensitas cahaya terhadap kinerja sistem yang menggunakan beberapa jenis intensitas cahaya yang diatur pada laboratorium seperti pada Tabel 4, dapat dilihat bahwa sistem berpengaruh pada intensitas cahaya. Saat kondisi cahaya redup antara 0,1 lux sampai 10,7 lux, sistem tidak dapat bekerja (error). Saat kondisi cahaya terlalu terang juga
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 10
Jumlah loop Percobaan 11221(full image) 9251(3/4 image) 5443 (half image) 2722 (1/4 image) 950demikian yaitu antara 66,8 lux sampai 84,7 lux, sistem bekerja tidak stabil (terkadang berhasil terkadang gagal). Hal ini dikarenakan kondisi cahaya tersebut mengganggu penangkapan gambar yang dilakukan oleh sensor sehingga menyebabkan perhitungan centroid menjadi kacau. Seperti terlihat pada Gambar 5, sistem bekerja stabil pada 2-3 loop dalam 10 kali percobaan. Namun bila intensitas cahaya pada ruangan tidak sesuai, akan menyebabkan kegagalan pembacaan sensor.
Tabel 4. Pengaruh intensitas cahaya terhadap kinerja sistem
intensitas cahaya
(lux)
Percobaan (jumlah loop)
1 2 3 4 5 6 7 8 9 10 84,7 4 x x x 3 x x x x x 66,8 x x x 3 x x 3 3 2 3 52,5 2 3 3 3 3 3 3 3 3 3 43.5 3 2 3 3 3 3 3 3 3 3 35 3 3 3 3 3 3 3 3 3 3 23,5 3 3 3 3 3 3 3 3 3 3 10,7 x x x x x x x x x x 0,3 x x x x x x x x x x 0,1 x x x x x x x x x x
Gambar 5. Grafik analisis pengaruh intensitas cahaya terhadap kinerja sistem.
Evaluasi Pengaruh Toleransi
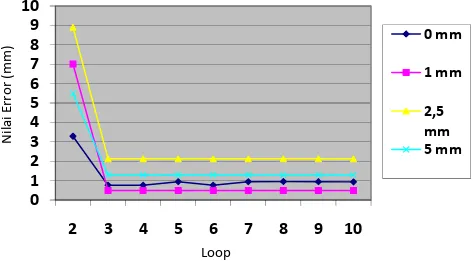
Toleransi pada sistem ini berperan penting dalam proses tracking karena toleransi pada sistem merupakan batasan yang diberikan pada robot berupa tingkat ketelitian yang harus dicapai oleh robot. Sistem dikatakan telah mencapai objek jika selisih titik pusat masa objek dengan titik pusat frame bernilai kurang dari toleransi. Berdasarkan data percobaan pada Tabel 5 dan Gambar 6, sistem lebih cepat dalam mencapai objek bila ketelitian diatur pada nilai besar tetapi dampaknya ketelitian sistem dalam mencapai objek berkurang. Untuk ketepatan end effector dalam mencapai objek, nilai toleransi dapat diatur dengan nilai yang kecil. Akan tetapi sistem masih memiliki kekurangan yaitu tidak dapat melakukan tracking hingga toleransi 0 mm seperti terlihat pada Gambar 7, walaupun toleransi diatur pada 0 mm nilai error-nya lebih tinggi dibandingkan saat toleransi diatur pada 1 mm. Hal ini dikarenakan oleh keterbatasan dari sensor yang memiliki nilai kesalahan baca (offset) yang bernilai hampir 1 mm.
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 10
Jumlah Loop Percobaan 84,7 lux 66,8 lux 52,5 lux 43.5 luxTabel 5. Pengaruh toleransi terhadap kinerja sistem
Toleransi
Percobaan (Jumlah loop)
1 2 3 4 5 6 7 8 9 10
5 mm 3 3 2 3 3 3 3 3 3 3
2,5 mm 4 4 4 3 3 3 4 3 3 3
1mm 5 4 6 4 6 6 6 5 6 6
0 mm 10 10 10 10 10 10 10 10 10 10
Gambar 6. Grafik pengaruh toleransi terhadap kinerja sistem
Gambar 7. Grafik nilai toleransi terhadap nilai error yang terjadi
Evaluasi Pengaruh Ukuran dan Jenis Objek
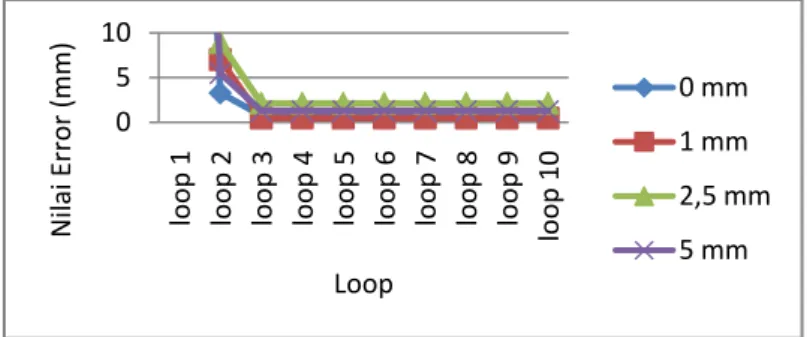
Pada percobaan pengaruh ukuran dan jenis objek terhadap kinerja sistem seperti terlihat pada Gambar 8-11, ukuran objek mempengaruhi jumlah loop yang dilakukan untuk mencapai objek. Jika ukuran objek semakin kecil maka jumlah iterasi akan semakin banyak dan begitu juga sebaliknya. Hal ini dikarenakan oleh semakin besarnya kesalahan perhitungan titik pusat massa objek dan semakin besarnya pengaruh offset dari sensor dikarenakan objek yang semakin kecil. Namun berdasarkan perbandingan antara Gambar 8 dan 9 dengan Gambar 10 dan 11, jenis objek
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7 8 9 10
Jumlah Loop Percobaan 5 mm 2,5 mm 1 mm 0 mm0
1
2
3
4
5
6
7
8
9
10
2
3
4
5
6
7
8
9
10
Nilai Error (mm) Loop 0 mm 1 mm 2,5 mm 5 mmtidak terlalu berpengaruh pada kinerja sistem saat toleransi diatur dengan nilai besar karena cara perhitungan yang dilakukan adalah dengan mencari titik pusat massa-nya sehingga tidak ada pengaruh terhadap jenis objek yang di-tracking.
Gambar 8. Grafik Nilai Error pada lingkaran berdiameter 4 cm.
Gambar 9. Grafik Nilai Error pada lingkaran berdiameter 1 cm.
Gambar 10. Grafik Nilai Error pada persegi 4 cm x 4 cm.
Gambar 11. Grafik Nilai Error pada kotak berukuran 1 cm x 2 cm.
0 5 10 loop 1 loop 2 loop 3 loop 4 loop 5 loop 6 loop 7 loop 8 loop 9 loop 10 Nilai Error (mm) Loop 0 mm 1 mm 2,5 mm 5 mm 0 5 10 loop 1 loop 2 loop 3 loop 4 loop 5 loop 6 loop 7 loop 8 loop 9 loop 10
Nilai
Err
o
r
(mm)
Loop
0mm 1mm 2,5mm 5mm 0 5 10 loop 1 loop 3 loop 5 loop 7 loop 9Nilai
Err
o
r
(mm)
Loop
0mm 1mm 2,5mm 5mm 0 5 10 loop 1 loop 2 loop 3 loop 4 loop 5 loop 6 loop 7 loop 8 loop 9 loop 10Nilai
Err
o
r(mm)
Loop
0mm 1mm 2,5mm 5 mmSIMPULAN
Simpulan yang dapat diambil dari hasil analisis pada sistem object tracking, antara lain: (1) tracking dengan menggunakan perhitungan titik pusat massa cepat dan robust hanya dengan 3 loop dan error yang terjadi jarang jika kondisi lingkungan telah disesuaikan; (2) sistem dapat bekerja antara intensitas cahaya 23,5 lux sampai 52,5 lux; (3) ketelitian yang dapat dijangkau oleh sistem mencapai batas toleransi 1 mm; (4) objek yang dapat diikuti berupa bangun-bangun dasar seperti lingkaran, persegi dan segitiga; (5) nilai toleransi dapat mempengaruhi kecepatan sistem untuk mencapai objek.
DAFTAR PUSTAKA
Becerra, H. M. dan Sagues, C. (2009). Pose-Estimation-Based Visual Servoing for Differential-Drive Robots using the 1D Trifocal Tensor. DIIS-I3A. Zaragoza: Universidad de Zaragoza.
Chandra, K., Gunawan, W. (2003). Simulasi Kinematika Robot Mitsubishi RV-M1.
Chaumette, F., Hutchinson, S. (2006). Visual servo control, Part I: Basic Approaches. IEEE Robotics and Automation Magazine. 13(4).
Cherubini, A., Chaumette, F., Oriolo, G. (2008). A Position-Based Visual Servoing Scheme For Following Paths With Nonholonomic Mobile Robots. IEEE/RSJ International Conference on Intelligent Robots and Systems.
Craig, John J. (1989). Introduction to Robotics: Mechanics And Control (2nd ed). California: Addison-Wesley.
Dame, A., Maarchand, E. (2011). Mutual Information-based Visual Servoing. IEEE Transactions on Robotics.
Hutchinson, S., Hager, G., Corke, P. (1996). A Tutorial On Visual Servo Control. IEEE T.on Robotic. and Automation.12(5): 651-670.
Kragic, D., Christensen, H.I. (2011). Survey on Visual Servoing for Manipulation: Centre for Autonomous Systems. Numerical Analysis and Computer Science.
Marchand, E. (2007). Control Camera and Light Source Positions using Image Gradient Information. IEEE Int. Conf. on Robotics and Automation.