PROPOSAL TUGAS AKHIR
SIMULASI PEMANDU OTOMATIS ALAT KONTROL
TEMBAK PADA MERIAM
ANTI
PESAWAT UDARA S60
BERDASARKAN DATA OBJEK PADA RADAR
Diajukan untuk memenuhi tugas mata kuliah Proyek 4Diajukan oleh
Ardi Nugraha 121524005
PROGRAM STUDI DIPLOMA IV TEKNIK INFORMATIKA
JURUSAN TEKNIKK KOMPUTER DAN INFORMATIKA
POLITEKNIK NEGERI BANDUNG
i
2 LATAR BELAKANG MASALAH ... 1
3 TUJUAN TUGAS AKHIR ... 3
4 RUMUSAN MASALAH ... 3
5 RUANG LINGKUP DAN BATASAN MASALAH ... 3
6 LANDASAN TEORI ... 4
6.1 Meriam Anti Udara 57mm S60 ... 4
6.2 Balistika Luar ... 4
8 METODE PENYELESAIAN MASALAH ... 12
8.1 Jenis Penelitian ... 12
8.2 Variabel Penelitian ... 12
8.3 Objek Penelitan ... 13
8.4 Tahapan Penelitian ... 13
8.4.1 Studi Pustaka ... 13
ii
8.4.3 Planning ... 14
8.4.4 Operation ... 14
8.4.5 Penarikan Kesimpulan ... 14
9 JADWAL TUGAS AKHIR ... 14
10 RENCANA ANGGARAN BIAYA ... 15
iii
DAFTAR GAMBAR
iv
DAFTAR TABEL
1 1 DESKRIPSI TOPIK
Simulasi merupakan suatu teknik meniru operasi-operasi atau proses- proses yang terjadi dalam suatu sistem dengan bantuan perangkat komputer dan dilandasi oleh beberapa asumsi tertentu sehingga sistem tersebut bisa dipelajari secara ilmiah [1].
Dalam simulasi digunakan komputer untuk mempelajari sistem secara numerik, dimana dilakukan pengumpulan data untuk melakukan estimasi statistik untuk mendapatkan karakteristik asli dari sistem. Simulasi merupakan alat yang tepat untuk digunakan terutama jika diharuskan untuk melakukan eksperimen dalam rangka mencari komentar terbaik dari komponen-komponen sistem. Hal ini dikarenakan sangat mahal dan memerlukan waktu yang lama jika eksperimen dicoba secara riil. Dengan melakukan studi simulasi maka dalam waktu singkat dapat ditentukan keputusan yang tepat serta dengan biaya yang tidak terlalu besar karena semuanya cukup dilakukan dengan komputer.
Pendekatan simulasi diawali dengan pembangunan model sistem nyata. Model tersebut harus dapat menunjukkan bagaimana berbagai komponen dalam sistem saling berinteraksi sehingga benar-benar menggambarkan perilaku sistem. Setelah model dibuat maka model tersebut ditransformasikan ke dalam program komputer sehingga memungkinkan untuk disimulasikan.
2 LATAR BELAKANG MASALAH
2
2
tunggal dengan cara melepaskan pedal tembak karena tidak dilengkapi dengan tuas atur tembak (TAT). Dalam penggolongannya digunakan oleh satuan Artileri Pertahanann Udara Sedang, dimana dalam satu pucuk meriam dilayani oleh delapan awak meriam [4].
Sesuai dengan berkembangnya jaman , S-60 sudah menjadi meriam tua, salah satu yang membuat fungsi Meriam 57 mm S-60 menurun adalah tidak dilengkapi dengan sistem kendali tembak. Meriam seperti mati suri karena dengan kecanggihan pesawat saat ini operator meriam bisa tidak berkutik jika mengandalkan melihat sasaran secara visual. Operator akan kesulitan melakukan proses penjejakan sampai dengan penembakan sasaran [5]. Oleh karena itu diperlukannya modernisasi, upaya modernisasi dapat diwujudkan dengan menggantikan alutsista yang lama dengan yang baru atau memodernisasikan alutsista yang lama sehingga masih dapat beroperasi yang dengan lebih baik, salah satunya adalah S-60 57 mm Retrofit, Khusus S-60 Retrofit sudah didukung sejumlah modifikasi, sehingga meriam dapat digerakkan secara elektrik dengan cara Local Control yang menggunakan tenaga listrik dari dua buah baterai yang tersedia dan dengan cara Remote Control yang dikendalikan dari Firing Control Sistem / sistem alat control tembak , Lepas dari itu, S-60 Retrofit masih disokong perangkat radar AN/UPS-3 TDAR (Tactical Defence Alert Radar). Antena taktis yang dapat digelar portable ini dapat mendeteksi
keberadaan sasaran sejauh 20 Km
3 3 TUJUAN TUGAS AKHIR
Tujuan dari penelitian ini adalah untuk membuat simulasi pemandu otomatis alat kontrol tembak meriam 57 mm S-60 berdasarkan data objek pada radar.
4 RUMUSAN MASALAH
Berdasarkan latar belakang maka, maka diperoleh Research Question sebagai berikut:
- RQ1: Bagaimana mentracking pergerakan pesawat tempur berdasarkan data keluaran dari RADAR
- RQ2: Bagaimana mensimulasikan pergerakan peluru dari meriam 57-mm S60 berdasarkan factor factor yang mempengaruhinya.
- RQ3: Bagaimana membuat sistem pemandu otomatis alat control tembak pada meriam 57-mm S60 berdasarkan data dari RADAR
- RQ4: Berapa persentase keberhasilan sistem pemandu otomatis alat control tembak meriam 57-mm S60 untuk beroperasi
5 RUANG LINGKUP DAN BATASAN MASALAH
Ruang lingkup dalam pengerjaan peneltian ini sesuai dengan judul penelitian yaitu mensimulasikan pemandu alat control tembak pada meriam anti pesawat udara S-60 berdasarkan data objek pada radar.
Untuk membatasi masalah yang akan dikaji, ada beberapa batasan yang dibuat:
Meriam yang digunakan adalah meriam S-60 dengan caliber 57 mm.
Radar yang digunakan mempunyai scan rate 36 RPM
Jumlah radar yang digunakan adalah 1 radar.
4
4 6 LANDASAN TEORI
6.1 Meriam Anti Udara 57mm S60
Meriam Anti Udara 57 mm S-60 adalah salah satu alat utama sistem senjata yang dimiliki oleh satuan Arhanud. Meriam ini adalah meriam sasaran udara 57 mm S60 bekerja atas dasar tekanan gas dan dapat ditembakkan secara otomatis dan tunggal dengan cara melepaskan pedal tembak karena tidak dilengkapi dengan tuas atur tembak (TAT). Dalam penggolongannya digunakan oleh satuan Artileri Pertahanann Udara Sedang, dimana dalam satu pucuk meriam dilayani oleh delapan awak meriam [7].
6.2 Balistika Luar
Balistika Luar adalah balistika di luar, sedangkan balistika itu sendiri adalah ilmu mengenai gerakan, sifat, dan efek dari proyektil, khususnya peluru, bom gravitasi, roket, dan lain-lain; ilmu atau seni merancang dan mengerakkan proyektil untuk mendapatkan hasil yang diinginkan, sehingga balistik luar mengandung arti ilmu yang mempelajari tingkah laku peluru beserta faktor-faktor yang memengaruhi di dalam udara bebas setelah keluar mulut laras [8], berikut factor factor :
1. MV (Muzzle Velocity / kecepatan moncong) 2. A/D (Angle of Departure / Sudut Keberangkatan) 3. Gravitasi
4. Hambatan Udara
5. Berat dan bentuk dari projektil 6. Perputaran projektil
7. Rotasi bumi
Pergerakan balistik di ruang berudara
5
gerak udara ini hanya dapat datang dari proyektil, ada saluran yang terus-menerus pada energi dari proyektil yang menunjukkan dirinya dalam bentuk perlawanan, maka proyektil kehilangan kecepatan.
Karakteristik Pergerakan balistik di ruang berudara
Hambatan udara dapat dianggap sebagai kekuatan perlambatan yang selalu bertindak dalam arah yang berlawanan dengan pergerakan proyektil. Sebagai proyektil bergerak melalui udara, udara di sekitarnya diatur dalam gerak; semakin cepat proyektil bergerak lebih banyak udara diatur dalam gerak. Karena energi gerak udara ini hanya dapat datang dari proyektil, ada saluran yang terus-menerus pada energi dari proyektil yang menunjukkan dirinya dalam bentuk perlawanan, maka proyektil kehilangan kecepatan
1. Pergerakan tidak tidak parabola
2. Rata rata komponen horizontal kecepatan (Hv) setelah titik tertinggi lebih kecil dibandung rata rata komponen horizontal kecepatan sebelum titik tertinggi ,maka projektik bergerak lebih pendek pada jarak horizontal. 3. Sudut projektil jatuh lebih besar dari pada sudut keberangkatan
4. Rata rata komponen vertical kecepatan (Vv) lebih besar setelah titik tertinggi ditempuh , maka , waktu projek untuk turun lebih cepat disbanding waktu projektil bergerak menujuk titik tertinggi.
5. Jarak tempuh kira kira sebanding dengan kecepatan di kuadratkan.
6. Perputaran yang diberikan pada projektil menyebabkan respon yang berbeda dikarenakan hambatan udara
7. Pergerakan di udara akan lebih pendek dan lebih rendah pada waktu melayang / Time of flight (TOF) tertentu dikarenakan:
i. Hv tidak lagi konstan tetapi akan berkurang setiap interval waktu yang tergantikan
ii. Vv dipengaruhi oleh gravitasi dan udara, berkurang ketika projektil bergerak menujuk titik puncak dan bertambah ketika telah melewati titik puncak.
iii. Titik puncak lebih dekat dengan titik jatuh projektil
6
6 6.3 RADAR
Radar (yang dalam bahasa Inggris merupakan singkatan dari Radio Detection and Ranging, yang berarti deteksi dan penjarakan radio ) adalah suatu sistem gelombang elektromagnetik yang berguna untuk mendeteksi, mengukur jarak dan membuat map benda-benda seperti pesawat terbang, berbagai kendaraan bermotor dan informasi cuaca (hujan) [9].
Prinsip Kerja
Konsep radar adalah mengukur jarak dari sensor ke target. Ukuran jarak
tersebut didapat dengan cara mengukur waktu yang dibutuhkan gelombang
elektromagnetik selama penjalarannya mulai dari sensor ke target dan kembali lagi
ke sensor, output dari radar berupa jarak dari radar menuju objek terdeteksi , sudut
antara radar dengan objek terdeteksi pada sumbu x y, ketinggian objek terdeteksi
diatas permukaan laut[10].
6.4 Gerak Lurus
Gerak lurus adalah gerak suatu obyek yang lintasannya berupa garis lurus. Jenis gerak ini disebut juga sebagai suatu translasi beraturan. Pada rentang waktu yang sama terjadi perpindahan yang besarnya sama [11].
Gerak lurus dibagi menjadi 2
Gerak Lurus Beraturan
Gerak lurus beraturan (GLB) adalah gerak lurus suatu objek, di mana dalam
gerak ini kecepatannya tetap dikarenakan tidak adanya percepatan, sehingga jarak
yang ditempuh dalam gerak lurus beraturan adalah kelajuan kali waktu.
𝑠 = 𝑣. 𝑡 (1)
𝑠 = 𝑗𝑎𝑟𝑎𝑘 𝑡𝑒𝑚𝑝𝑢ℎ
7
𝑡 = 𝑠𝑒𝑙𝑎𝑛𝑔 𝑤𝑎𝑘𝑡𝑢
Gerak Lurus Berubah Beraturan
Gerak lurus berubah beraturan (GLBB) adalah gerak lurus suatu objek, di mana kecepatannya berubah terhadap waktu akibat adanya percepatan yang tetap. Akibat adanya percepatan, rumus jarak yang ditempuh tidak lagi linier melainkan kuadratik.
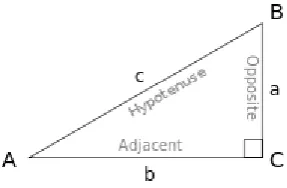
Dalam matematika, teorema Pythagoras adalah hubungan mendasar dalam geometri Euclidean antara tiga sisi dari segitiga siku-siku. Menyatakan bahwa kuadrat dari sisi miring (sisi berlawanan sudut kanan) adalah sama dengan jumlah kuadrat dari dua sisi lainnya. teorema dapat ditulis sebagai persamaan yang berkaitan dengan panjang sisi a, b dan c, sering disebut "persamaan Pythagoras " [12]
𝑎2+ 𝑏2 = 𝑐2 (3)
dimana c mewakili panjang sisi miring dan a dan b panjang dari segitiga dua sisi lainnya.
6.6 Konsep Trigonometri
8
8 Berikut Fungsi dasar Trigonometri
sin 𝐴 =
𝑎𝑐(4)
cos 𝐴 =
𝑏𝑐(5)
tan 𝐴 =
cos 𝐴sin 𝐴 (6)6.7 Kalman Filter
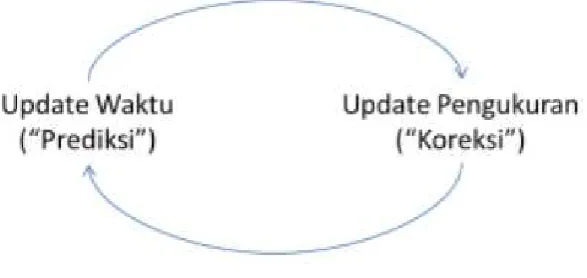
Kalman Filter merupakan sekumpulan persamaan matematik yang menawarkan cara komputasi rekursif dan efisien untuk mengestimasi state dari sebuah proses, sedemikian rupa sehingga meminimumkan rata-rata dari kuadrat error. Filter ini sangat berguna dalam beberapa aspek: mendukung estimasi state yang telah lalu, saat ini, dan juga state masa depan, dan mampu bekerja meskipun sifat-sifat model sistem tidak diketahui.
Kalman filter mengestimasi satu proses melalui mekanisme kontrol umpan-balik: Filter mengestimasi state dari proses kemudian mendapat umpan balik berupa nilai hasil pengukuran yang bercampur noise. Persamaan untuk Kalman filter dikelompokkan dalam dua bagian: persamaan update waktu dan persamaan update pengukuran. Persamaan update waktu bertugas untuk mendapatkan nilai pra-estimasi
9
untuk waktu step selanjutnya. Persamaan update pengukuran bertugas untuk keperluan umpan balik, seperti memadukanhasil pengukuran terbaru dengan nilai pra-estimasi untuk mendapatkan nilai pasca-estimasi yang lebih baik [14].
6.8 Estimasi Posisi
Menggunakan Prinsip dari metoda filter kalman, prinsip gerak lurus beraturan dan gerak lurus, berubah beraturan ,Konsep Trigonometri , Teorema Pythagoras dapat digunakan untuk melakukan estimasi pergerakan pesawat berdasarkan data dari RADAR , dengan output dari RADAR berupa jarak objek yang terdeteksi pada radar, sudut yang dibentuk dari radar menuju objek dan ketinggian objek yang terdeteksi pada radar maka akan digunakan tahap tahap seperti berikut.
1. Deteksi posisi berdasarkan koordinat z yang berdasarkan keluaran data ketinggian objek dari radar, dalam hal ini data ketinggian objek merupakan ketinggian diatas permukaan laut.
𝑧1 = 𝐻1− 𝐻𝑟 (7)
𝑍1= 𝑃𝑜𝑠𝑖𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑍
𝐻1= 𝐷𝑎𝑡𝑎 𝑘𝑒𝑡𝑖𝑛𝑔𝑔𝑖𝑎𝑛 𝑜𝑏𝑗𝑒𝑘 𝑡𝑒𝑟𝑑𝑒𝑡𝑒𝑘𝑠𝑖 𝑅𝐴𝐷𝐴𝑅 𝑑𝑖𝑎𝑡𝑎𝑠 𝑝𝑒𝑟𝑚𝑢𝑘𝑎𝑎𝑛 𝑙𝑎𝑢𝑡
10
10
2. Deteksi posisi berdasarkan koordinat x dan y yang berdasarkan keluaran data sudut dari radar dengan prinsip trigonometri dan Pythagoras pada persamaan no (3),(4),(5) dan data z pada persamaan no (7)
𝑥1= 𝑐𝑜𝑠(𝛼). (𝑑12− 𝑧12) (8)
3. Deteksi kecepatan objek berdasarkan data koordinat x,y,z objek dengan prinsip gerak lurus beraturan pada persamaan (1) nilai koordinat diperoleh dari persamaan (7)(8) dan (9)
𝑣𝑧𝑡=(𝑧𝑡− 𝑧𝑅𝑡−1) . 𝑅
11
4. Jika kecepatan rata rata dapat diketahui dimana diperoleh dari persamaan (10) (11) (12) maka untuk mendapatkan akeselerasi dari objek pada radar dapat diketahui
\
𝑎𝑧𝑡=(𝑣𝑧𝑡− 𝑣60𝑧𝑡−1) .𝑅 (13)
𝑎𝑥𝑡=(𝑣𝑥𝑡− 𝑣60𝑥𝑡−1) .𝑅 (14)
𝑎𝑦𝑡=(𝑣𝑦𝑡− 𝑣60𝑦𝑡−1) .𝑅 (15)
𝑎𝑥𝑡= 𝑎𝑘𝑠𝑒𝑙𝑒𝑟𝑎𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑥 𝑝𝑎𝑑𝑎 𝑤𝑎𝑘𝑡𝑢 𝑘𝑒 𝑡
𝑎𝑦𝑡 = 𝑎𝑘𝑠𝑒𝑙𝑒𝑟𝑎𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑦 𝑝𝑎𝑑𝑎 𝑤𝑎𝑘𝑡𝑢 𝑘𝑒 𝑡
𝑎𝑧𝑡 = 𝑎𝑘𝑠𝑒𝑙𝑒𝑟𝑎𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑧 𝑝𝑎𝑑𝑎 𝑤𝑎𝑘𝑡𝑢 𝑘𝑒 𝑡
𝑅 = 𝑆𝑐𝑎𝑛 𝑟𝑎𝑡𝑒 𝑝𝑎𝑑𝑎 𝑅𝑎𝑑𝑎𝑟
5. Dari data kecepatan pada persamaan (10) (11) (12) dan akselerasi persamaan (13) (14) (15) maka di dapatkan estimasi posisi objek pada detik ke T selanjutnya baik pada koordinat x,y dan z dengan prinsip gerak lurus berubah beraturan sesuai pada persamaan (2)
𝑧𝜃 = 𝑧𝑡+ (𝑣𝑧𝑡 . 𝑇 +12 . 𝑎𝑧𝑡 𝑇) (16)
𝑥𝜃 = 𝑥𝑡+ (𝑣𝑥𝑡 . 𝑇 +12 . 𝑎𝑥𝑡 𝑇) (17)
𝑦 = 𝑦𝑡+ (𝑣𝑦𝑡 . 𝑇 +12 . 𝑎𝑦𝑡 𝑇) (18)
𝑧𝜃= 𝑒𝑠𝑡𝑖𝑚𝑎𝑠𝑖 𝑝𝑜𝑠𝑖𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑧 𝑝𝑎𝑑𝑎 𝑤𝑎𝑘𝑡𝑢 𝑘𝑒 𝑇
𝑥𝜃= 𝑒𝑠𝑡𝑖𝑚𝑎𝑠𝑖 𝑝𝑜𝑠𝑖𝑠𝑖 𝑜𝑏𝑗𝑒𝑘 𝑏𝑒𝑟𝑑𝑎𝑠𝑎𝑟𝑘𝑎𝑛 𝑘𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡 𝑥 𝑝𝑎𝑑𝑎 𝑤𝑎𝑘𝑡𝑢 𝑘𝑒 𝑇
12
12 7 HIPOTESIS
Berdasarkan studi pustaka, ada beberapa hipotesis yang didapat:
H1: untuk mensimulasikan pergerakan pesawat tempur berdasarkan factor
factor yang mempengaruhinya, dapat di buatkan persamaan matematisnya.
H2: untuk mensimulasikan pergerakan peluru berdasarkan factor factor yang mempengaruhinya, dapat di buatkan persamaan matematisnya.
H3: Persamaan matematis pergerakan peluru dan data yang diperoleh dari
radar dapat digunakan untuk membuat sistem pemandu otomatis alat control tembak pada meriam 57-mm S60
H4: Dengan keluaran data RADAR dari objek yang terdeteksi pada RADAR dapat dihitung kecepatan, akselerasi objek tersebut dan estimasi posisi objek tersebut pada waktu tertentu.
8 METODE PENYELESAIAN MASALAH
8.1 Jenis Penelitian
Jenis penelitian yang akan dilakukan yaitu menggunakan metode penelitian kuantitatif dengan teknik penelitian eksperimental mendifinisikan penelitian kuantitatif adalah suatu proses menemukan pengetahuan yang menggunakan data berupa angka sebagai alat analisis keterangan mengenai apa yang ingin diketahui. Penelitian ini akan menguji pemakaian persamaan matematis pergerakan pesawat tempur dan pergerakan peluru untuk sistem pemandu otomatis alat control tembak pada meriam 57-mm S60 dan dilakukan eksperimen dengan melakukan perekaman berkala untuk mendapatkan data uji yang beragam.
8.2 Variabel Penelitian
13 a. Variabel bebas (independent variables)
Variabel bebas merupakan variabel yang dapat dikendalikan dan akan mempengaruhi nilai dari variabel terikat, dalam hal ini variabel bebasnya adalah posisi radar , posisi meriam, , hambatan udara, perputaran proyektil, rotasi bumi , gravitasi, jenis objek terdeteksi, sudut terbentuk antara radar dan objek terdeteksi, jarak antara radar dan objek terdeteksi , ketinggian radar diatas permukaan laut, ketinggian objek terdeteksi diatas permukaan laut.
b. (dependent variables)
Variabel terikat merupakan variabel yang nilainya tergantung dari nilai variabel lainnya, dalam hal ini variabel terikatnya adalah kecepatan moncong proyektil, sudut keberangkatan, kecepatan objek terdeteksi, percepatan objek terdeteksi, koordinat estimasi objek terdeteksi.
8.3 Objek Penelitan
Objek yang digunakan dalam penelitian ini adalah data posisi pesawat yang diambil dari histori RADAR TNI .
8.4 Tahapan Penelitian
Berdasarkan pada jenis penelitian dan kebutuhan evaluasi empiris dengan fokus pada perangkat lunak [15] maka, tahapan penelitian yang akan dilakukan adalah sebagai berikut.
8.4.1 Studi Pustaka
Studi pustaka bertujuan untuk mencari dan mempelajari sumber-sumber literatur yang relevan terkait penelitian, dengan tujuan untuk menguatkan kajian yang akan dilakukan kedepannya. Pustaka yang menjadi sumber referensi dari penelitian ini meliputi:
- Pustaka terkait Tumor Hati.
14 8.4.2 Scoping
Langkah awal yang dilakukan pada penelitian ini adalah melakukan pendefinisian ruang lingkup. Pendefinisian ruang lingkup bertujuan untuk mengetahui tujuan penelitian , lingkup penelitian dan batasan masalah dari penelitian yang akan dilakukan. Hal pertama yang dilakukan adalah menentukan topik
penelitian yakni “Simulasi pemandu otomatis alat kontrol tembak pada meriam anti pesawat udara s-60 berdasarkan data objek pada radar”.
8.4.3 Planning
Dalam tahap ini akan ditentukan environment dimana penelitian akan dijalankan , jenis dan desain penelitian yang akan dipilih berdasarkan hipotesis dan variable yang sudah ditentukan, persiapan instrument untuk menimplementasi penelitian dan pengecekan validitas yang bertujuan untuk memeriksa validitas penelitian.
8.4.4 Operation
Pada tahap ini akan dijalankan 3 tahap yakni, Persiapan dimana subjek penelitian akan dipilih ,dibentuk, dan disiapkan, Implementasi dimana subjek penelitian akan dikerjakan sesuai pada tahap Planning dan data akan dikumpulkan, dan yang terakhir adalah Data validation dimana data yang telah dikumpulkan akan di validasi dan di test.
8.4.5 Penarikan Kesimpulan
15
Tabel 1 Jadwal Tugas Akhir
10 RENCANA ANGGARAN BIAYA
Jumlah Barang Habis 659.000
B. Biaya Pelaporan 34,36 %
Jumlah Biaya Pelaporan 385.000
Total Anggaran 1.004.000 100%
16 DAFTAR PUSTAKA
[1] A. M. Law and W. D. Kelton, Simulation Modeling & Analysis, McGraw-Hill, 1991.
[2] K. P. Bappenas RI, Lampiran Pidato Kenegaraan Presiden RI, Jakarta: Bappenas RI, 2015.
[3] indomiliter, 24 Februari 2012. [Online]. Available: http://www.indomiliter.com/s-60-57mm-meriam-perisai-angkasa-sepuh-arhanud-tni-ad/. [Accessed 18 Januari 2017].
[4] J. Saputra, R. Nur Hasanah and M. A. Muslim, TARGET TRACKING OF THE S-60 SINGLE-BARREL 57MM, Malang: ARPN Journal of Engineering and Applied Sciences, 2015.
[5] Departemen Taktik dan Staf Pusdikarhanud Pussenarhanud, Pusdikarhanud
Pussenarhanud, [Online]. Available:
http://www.pusdikarhanud.mil.id/index.php?artikel=340. [Accessed 18 Januari 2017].
[6] indomiliter, 11 April 2016. [Online]. Available: http://www.indomiliter.com/anups-3-tdar-radar-penjejak-target-untuk-meriam-psu-s-60-57mm-retrofit-arhanud-tni-ad/. [Accessed 18 1 2017].
[7] J. Saputra, R. Nur Hasanah and M. A. Muslim, Kontrol Trakcing Laras Meriam 57mm dengan Menggunakan Hybrid Kontrol Logika Fuzzy -PID, Malang: Universitas Brawijaya, 2014.
[8] Chief of the Defence Staff Canada Land Forces, Field Artillery : BALLISTICS AND AMMUNITION, Canada Land Forces, 1992.
[9] M. I. Skolnik, Radar handbook, McGraw-Hill Professional, 1990.
[10] D. Jenn, Radar Fundamentals, Monterey: Department of Electrical & Computer Engineering, Naval Postgraduate School, 2006.
[11] R. Resnick and D. Halliday, Physics, Wiley International Edition, 1996.
[12] A. Posamantier, The Pythagorean Theorem: The Story of Its Power and Beauty, Prometheus Books, 2010.
[13] Hazenwickel and E. Michiel, Trigonometric Functions, Springer, 2001.
17 [15] C. Wohlin, P. Runeson, M. Host, M. C. Ohlson, B. Regnell and A. Wesslen,