PEMBANGUNAN APLIKASI WEB UNTUK
PEMANTAUAN PERGERAKAN KENDARAAN
PADA SISTEM PENJEJAKAN BERBASIS GPS
Tugas Akhir
Diserahkan kepada Departemen Teknik Geodesi
Fakultas Teknik Sipil dan Perencanaan
Institut Teknologi Bandung
oleh :
Lorensius W Londa Tiga
151 99 037
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Bidang
Teknik Geodesi
DEPARTEMEN TEKNIK GEODESI
FAKULTAS TEKNIK SIPIL DAN PERENCANAAN
INSTITUT TEKNOLOGI BANDUNG
LEMBAR PENGESAHAN
Diperiksa dan disetujui oleh:
Pembimbing I, Pembimbing II
Dr. Ir. Bambang Setyadji, M. Si. Dr. Ir. Agung Budi Harto, M. Eng. NIP: 131 944 836 NIP: 132 061 764
Disahkan oleh:
Ketua Departemen Teknik Geodesi
Fakultas Teknik Sipil dan Perencanaan
Institut Teknologi Bandung
Pernyataan Selesai Penulisan Skripsi
Yang bertanda tangan di bawah ini:
Nama : Lorensius W Londa Tiga
NIM : 151 99 037
Dengan ini menyatakan bahwa skripsi saya yang berjudul:
“PEMBANGUNAN APLIKASI WEB UNTUK PEMANTAUAN PERGERAKAN KENDARAAN PADA SISTEM PENJEJAKAN BERBASIS GPS”
adalah benar dibuat oleh saya sendiri dan belum pernah dibuat dan diserahkan
sebelumnya, baik sebagian ataupun seluruhnya, baik oleh saya maupun oleh
orang lain, baik di ITB maupun di institusi pendidikan lainnya.
Bandung, 06 Februari 2004
Lorensius W Londa Tiga
Mengetahui:
Pembimbing utama
Dr. Ir. Bambang Setyadji, M. Si.
"Don't worry about what anybody else is going to do… The best way to predict the future is
to invent it. Really smart people with reasonable funding can do just about anything that
doesn't violate too many of Newton's Laws!"
-Alan Kay, The Inventor of Smaltalk, 1971-
Skripsi ini kupersembahkan untuk kedua orang tuaku yang tercinta di Ende Flores
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa karena
atas segala berkat dan rahmatNya penulis dapat menyelesaikan tugas akhir ini.
Tugas akhir ini merupakan salah satu syarat untuk menyelesaikan pendidikan
Sarjana Teknik bidang Teknik Geodesi.
Dalam penyusunan tugas akhir ini penulis banyak memperoleh bantuan
dan bimbingan dari berbagai pihak, oleh karena itu pada kesempatan ini penulis
ingin memberikan penghargaan dan ucapan terima kasih yang sebesar-besarnya
kepada semua pihak yang telah membantu penulis dalam menyelesaikan tugas
akhir ini. Semoga Tuhan Yang Maha Kasih memberikan balasan yang lebih baik.
Penghargaan dan ucapan terima kasih penulis sampaikan pada :
1. Bapak Dr. Ir. Wedyanto Kuntjoro, M. Sc, selaku Ketua Departemen
Teknik Geodesi FTSP ITB.
2. Bapak Ir. Bambang Subekti, M. Sc, selaku Sekretaris Departemen Teknik
Geodesi FTSP ITB.
3. Bapak Dr. Ir Bambang Setyadji, M. Si dan Dr. Ir Agung Budi Harto, M.
Eng selaku dosen pembimbing yang telah banyak memberikan saran dan
petunjuk dalam pengerjaan tugas akhir ini.
4. Bapak Dr. Ir. Hasanuddin Z.A, M.Sc, Dr. Ir. Ketut Wikantika, M. Eng, dan
Ir. Irdam Adil, M.T selaku dosen penguji. Terima kasih atas segala koreksi
dan ide-ide masukannya.
5. Orang tua penulis atas segala jasa-jasanya yang tak akan bisa
terbalaskan.
6. Teman-teman seperjuangan di Amateur Radio Club (ARC) ITB, terima
pinjaman rignya), Emil, Ambo, Hotben, serta adik-adik kru yang telah
menemani penulis “daemon” dalam mengerjakan tugas akhir di ARC.
7. Lukas, Erikson, Andri Fernandus, terima kasih atas segala bantuannya.
8. Paul, terima kasih atas bantuannya dalam pelaksanaan uji coba tugas
akhir ini.
9. Teman-teman GD 99 dan seluruh rekan-rekan Ikatan Mahasiswa Geodesi
ITB.
10. Seluruh staff karyawan Departemen Teknik Geodesi ITB
11. Dan semua pihak yang telah membantu penulis dalam menyelesaikan
tugas akhir ini dan tidak dapat penulis sebutkan satu persatu.
Penulis menyadari tugas akhir ini jauh dari sempurna. Oleh karena itu
kritik dan saran membangun akan senantiasa penulis nantikan untuk mencapai
hasil yang lebih baik. Akhir kata penulis berharap tugas akhir ini dapat
bermanfaat bagi kita semua.
Bandung, Februari 2004
ABSTRAK
Aplikasi Fleet Management System dewasa ini mengalami perkembangan
yang cukup pesat seiring dengan berkembangnya teknlogi GPS, Sistem
Informasi Geografis (SIG) dan komunikasi data. Aplikasi ini sangat bermanfaat di
bidang transportasi untuk pemantauan pergerakan armada kendaraan sehingga
mempermudah pihak pengelola untuk melakukan manajemen dan perencanaan.
Di sisi lain perkembangan teknologi internet khususnya teknologi web
memungkinkan informasi dapat beredar dengan cepat tanpa ada batasan waktu
dan tempat. Integrasi teknologi web ke dalam aplikasi fleet management system
akan mempermudah proses pemantauan sehingga posisi kendaaan tidak hanya
dapat diakses pada pusat kontrol saja melainkan kapan dan dimana melalui
BAB I
PENDAHULUAN
1.1 Latar Belakang
Aplikasi GPS (Global Positioning System) dalam bidang transportasi
khususnya pada sistem pemantauan armada kendaraan atau Fleet Management
System merupakan integrasi dari tiga teknologi yaitu teknologi penentuan posisi
dengan GPS, teknologi SIG (Sistem Informasi Geografis) dan teknologi
komunikasi data. Dalam sistem ini, GPS berfungsi sebagai alat penentuan posisi
kendaraan, SIG sebagai penyedia informasi spasial dan sebagai “latar belakang”
posisi kendaraan yang akan dipantau dan jaringan komunikasi data sebagai
penghubung antara kendaraan dan pusat kontrol. Saat ini aplikasi ini
mengalami perkembangan yang cukup pesat seiring dengan perkembangan
ketiga teknologi pendukung aplikasi tersebut.
Di lain pihak perkembangan teknologi internet saat ini menyebabkan
proses penyebaran dan pertukaran informasi dapat dilakukan dengan cepat
secara global tanpa ada batasan waktu. Teknologi World Wide Web (WWW) atau
web sebagai salah satu jenis layanan yang disediakan oleh internet merupakan
jenis layanan yang berkembang paling pesat dan paling banyak digunakan saat
ini. Perkembangan perangkat lunak pendukung web seperti bahasa
pemrograman server side, applet java, active x, dan lain-lain telah menambah
kemampuan web dari yang semula hanya bisa menampilkan halaman-halaman
statik dimana pengguna hanya bisa melihat informasi tanpa adanya interaksi
antara pengguna dan web, saat ini web lebih bersifat dinamis yang
Integrasi teknologi web ke dalam aplikasi pemantauan kendaraan
memungkinkan informasi posisi kendaraan dapat divisualisasikan ke dalam web
sehingga informasi tersebut dapat diakses secara global tanpa ada batasan
waktu dan tempat.
1.2 Perumusan Masalah
Permasalahan dalam tugas akhir ini adalah bagaimana agar posisi dari
kendaraan yang ditentukan oleh GPS dapat ditampilkan di web secara online di
internet sehingga informasi tersebut dapat diakses dengan mudah oleh
pengguna yang memiliki koneksi ke internet.
1.3 Tujuan
Tujuan dari penulisan tugas akhir ini adalah membangun aplikasi web
yang dapat menampilkan posisi kendaraan secara online di internet untuk
keperluan pemantauan pergerakan kendaraan.
1.4 Batasan Masalah
Dalam tugas akhir ini permasalahan dibatasi pada:
1. Desain dan implementasi aplikasi web untuk visualisasi posisi kendaraan.
2. Aplikasi web dikembangkan di atas lingkungan sistem operasi Linux dengan
dukungan perangkat-perangkat lunak freeware dan open source.
3. Aplikasi web dirancang untuk digunakan dalam pemantauan pergerakan
armada kendaraan, namun karena keterbatasan peralatan komunikasi, uji
coba aplikasi hanya dilakukan untuk kasus satu kendaraan.
1.5 Metodologi Penelitian
Metodologi penelitan dalam tugas akhir ini adalah sebagai berikut:
1. Studi literatur yang meliputi pengkajian konsep penentuan posisi dengan
terhadap perangkat lunak open source dan perangkat keras yang
mendukung pembangunan aplikasi.
2. Analisis kebutuhan dan kondisi dari aplikasi yang akan dibangun baik pada
tingkat perangkat lunak maupun perangkat keras.
3. Perancangan sistem dan aplikasi yang akan dibangun.
4. Implementasi hasil perancangan dalam ke dalam bahasa pemrograman
(coding)
5. Pengujian dan analisis terhadap aplikasi yang telah dibangun.
6. Penarikan kesimpulan.
1.6 Sistematika Penulisan
Sistematika penulisan dalam tugas akhir ini adalah sebagai berikut:
Bab I Pendahuluan
Bab ini berisi latar belakang, perumusan masalah, tujuan, batasan masalah dan
metodologi penelitian tugas akhir ini.
Bab II Dasar Teori
Bab ini menjelaskan konsep dan teori dasar yang mendukung penulisan tugas
akhir ini seperti teknologi penentuan posisi dengan GPS, teknologi World Wide
Web, dan teknologi komunikasi radio paket.
Bab III Analisis dan Perancangan Aplikasi Web untuk Pemantauan Pergerakan Kendaraan
Bab ini berisi pembahasan mengenai analisis dan perancangan terhadap aplikasi
web dan sistem secara keseluruhan.
Bab IV Implementasi Aplikasi Web untuk Pemantauan Pergerakan Kendaraan.
Bab ini berisi implementasi dari hasil perancangan pada Bab III
Bab ini berisi pengujian dan analisis terhadap hasil pengujian dari aplikasi yang
telah dibangun.
Bab VI Kesimpulan dan Saran
Bab ini berisi kesimpulan dan saran terhadap seluruh kegiatan tugas akhir yang
BAB II
DASAR TEORI
2.1 Sistem Navigasi GPS
GPS adalah sistem radio navigasi dan penentuan posisi dengan
menggunakan satelit navigasi yang dimiliki dan dikelola oleh Departemen
Pertahanan Amerika Serikat. Nama formalnya adalah NAVSTAR GPS
(Navigation Satellite Timing and Ranging Global Positioning System). Sistem ini
digunakan untuk memberikan informasi mengenai posisi, waktu dan kecepatan
kepada siapa saja secara global tanpa ada batasan waktu dan cuaca. Satelit
GPS pertama diluncurkan pada tahun 1978 dan secara resmi sistem GPS
dinyatakan operasional pada tahun 1994.
2.1.1 Segmen Penyusun Sistem GPS
Sistem GPS tediri atas tiga segmen utama, yaitu segmen angkasa (space
segment), segmen sistem kontrol (control system segment), dan segmen
pengguna (user segment) [Abidin, 2000].
Segmen Angkasa
Segmen angkasa terdiri dari 24 buah satelit GPS yang secara kontinyu
memancarkan sinyal – sinyal yang membawa data kode dan pesan navigasi
yang berguna untuk penentuan posisi, kecepatan dan waktu. Satelit-satelit
tersebut ditempatkan pada enam bidang orbit dengan periode orbit 12 jam
dan ketinggian orbit 20.200 km di atas permukaan bumi. Keenam orbit
tersebut memiliki jarak spasi yang sama dan berinklinasi 55o terhadap
ekuator dengan masing-masing orbit ditempati oleh empat buah satelit
dengan jarak antar satelit yang tidak sama.
Segmen sistem kontrol terdiri dari Master Control Station (MCS), Ground
Station, dan beberapa Monitor Station (MS) yang berfungsi untuk mengontrol
dan memonitor pergerakan satelit.
Segmen Pengguna
Segmen pengguna terdiri dari para pengguna satelit GPS baik yang ada di
darat, laut maupun udara Dalam hal ini receiver GPS dibutuhkan untuk
menerima dan memproses sinyal-sinyal dari GPS untuk digunakan dalam
penentuan posisi, kecepatan, dan waktu.
2.1.2 Sinyal GPS
Sinyal GPS yang dipancarkan oleh satelit-satelit GPS menggunakan band
frekuensi L pada spektrum gelombang elektromagnetik. Setiap satelit GPS
memancarkan dua (2) gelombang pembawa yaitu L1 dan L2 yang berisi data
kode dan pesan navigasi.
Pada dasarnya sinyal GPS terdiri dari tiga komponen, yaitu:
penginformasi jarak (kode), penginformasi posisi satelit (navigation message),
dan gelombang pembawanya (carrier wave) [Abidin, 2000].
2.1.2.1 Penginformasi Jarak
Penginformasi jarak yang dikirimkan oleh satelit GPS terdiri dari dua buah
kode PRN (Pseudo Random Noise) yaitu kode-C/A (Coarse Acquisition/Clear
Access) yang dimodulasikan pada gelombang pembawa L1 dan kode-P(Y)
(Private) yang dimodulasikan baik pada gelombang pembawa L1 maupun L2.
Kedua kode tersebut disusun oleh rangkaian kombinasi bilangan-bilangan biner
(0 dan 1).
Setiap satelit GPS mempunyai struktur kode yang unik dan berbeda
antara satu satelit dengan satelit lainnya yang memungkinkan receiver GPS
untuk membedakan sinyal-sinyal yang datang dari satelit-satelit GPS yang
menggunakan teknik yang dinamakan CDMA (Code Division Multiple Accsess)
[Kapplan et.al, 1996].
2.1.2.2 Penginformasi Posisi
Pesan navigasi yang dibawa oleh sinyal GPS terdiri dari informasi
ephemeris (orbit) satelit yang biasa disebut broadcast ephemeris yang terdiri dari
parameter waktu, parameter orbit satelit dan parameter perturbasi dari orbit
satelit [Abidin, 2000]. Parameter – parameter tersebut digunakan untuk
menentukan koordinat dari satelit.
Disamping broadcast ephemeris , pesan navigasi juga berisi almanak
satelit yang memberikan informasi tentang orbit nominal satelit yang berguna
bagi receiver dalam proses akuisasi awal data satelit maupun bagi para
pengguna dalam perencanaan waktu pengamatan yang optimal [Abidin, 2000].
Informasi lain yang dibawa oleh pesan navigasi adalah koefisien koreksi jam
satelit, parameter koreksi ionosfer, status konstelasi satelit dan informasi
kesehatan satelit.
2.1.2.3 Gelombang Pembawa
Kode dan pesan navigasi agar dapat mencapai pengamat harus
dimodulasikan terlebih dahulu pada gelombang pembawa. Gelombang pembawa
yang digunakan terdiri atas dua gelombang , yaitu gelombang L1 dan L2.
Gelombang L1 (1575.42 Mhz) membawa kode-P(Y) dan kode-C/A sedangkan
gelombang L2 (1227.60 Mhz) hanya membawa kode-P(Y) saja. Teknik modulasi
yang digunakan dalam sinyal GPS adalah BPSK (Binary Phase Shift Keying)
yang menggunakan modulasi fase [Kapplan et.al, 1996].
2.1.3 Penentuan Posisi Absolut dengan GPS
Penentuan posisi dengan GPS adalah penentuan posisi tiga dimensi
yang dinyatakan dalam sistem koordinat kartesian (X,Y,Z) dalam datum WGS
tersebut dapat dikonversi ke dalam koordinat geodetik (φ,λ,h). Titik yang akan
ditentukan posisinya dapat diam (static positioning) maupun bergerak (kinematic
positioning). Penentuan posisi absolut merupakan metode penentuan posisi
yang paling mendasar dan paling banyak digunakan untuk aplikasi-aplikasi yang
tidak memerlukan tingkat ketelitian posisi yang tinggi dan tersedia secara instan
(real-time) seperti pada aplikasi navigasi wahana bergerak (darat, laut dan
udara).
2.1.3.1. Prinsip Penentuan Posisi Absolut dengan GPS.
Prinsip dasar penentuan posisi absolut dengan GPS adalah dengan
reseksi jarak ke beberapa satelit GPS sekaligus yang koordinatnya telah
diketahui [Abidin, 2000]. Pada penentuan posisi absolut dengan data
pseudorange, jarak pengamat (receiver) ke satelit GPS ditentukan dengan
mengukur besarnya waktu tempuh sinyal GPS dari satelit ke receiver pengamat.
Waktu tempuh ditentukan dengan menggunakan teknik korelasi kode
(code correlation technique) dimana sinyal GPS yang datang dikorelasikan
dengan sinyal replika yang diformulasikan dalam receiver. Jarak dari receiver ke
pengamat kemudian dapat ditentukan dengan mengalikan waktu tempuh dengan
kecepatan cahaya. Karena ada perbedaan waktu pada jam satelit dan jam
receiver maka data jarak yang diperoleh bukan merupakan jarak yang
sebenarnya melainkan jarak pseudorange yang persamaannya dapat
dirumuskan sebagai berikut [Kapplan et.al, 1996]:
ρ = r + c(tu – δt)
r = c(Tu – Ts) = c∆t
dimana:
ρ = jarak pseudorange
c = kecepatan cahaya
Ts = Waktu gps pada saat sinyal meninggalkan satelit
Tu = Waktu gps pada saat sinyal mencapai receiver
tu = Perbedaan waktu jam receiver dengan waktu GPS
δt = Perbedaan waktu jam satelit dengan waktu GPS
Untuk mendapatkan posisi tiga dimensi (X,Y,Z) maka terdapat empat
parameter yang harus diestimasi / dipecahkan yaitu:
• parameter koordinat (X,Y,Z)
• parameter kesalahan jam receiver GPS.
Oleh sebab itu untuk memecahkan keempat parameter tersebut dibutuhkan
pengamatan terhadap minimal empat (4) buah satelit secara simultan yang
dirumuskan dalam persamaan berikut [Kapplan et.all, 1996].
ρ1 = 2
xu,yu = koordinat pengamat
ctu = koreksi kesalahan jam receiver
2.1.3.2 Ketelitian Posisi Absolut
Ketelitian posisi absolut GPS sangat bergantung pada tingkat ketelitian
data pseudorange serta geometri dari satelit pada saat pengukuran [Kapplan
Faktor – faktor yang mempengaruhi ketelitian penentuan posisi dengan GPS
adalah sebagai berikut:
Satelit, seperti kesalahan ephemeris (orbit) dan jam satelit,
Medium propagasi, seperti bias ionosfer dan bias troposfer yang
mempengaruhi kecepatan (memperlambat) dan arah perambatan sinyal
GPS.
Receiver GPS, seperti kesalahan jam receiver, kesalahan yang terkait
dengan antena dan noise (derau). Kesalahan-kesalahan ini bergantung pada
kualitas dari receiver GPS dan berbanding lurus dengan harga dari receiver
GPS, semakin tinggi harga receiver, semakin tinggi kualitasnya.
Lingkungan sekitar receiver GPS, seperti multipath yaitu fenomena dimana
sinyal GPS yang tiba di antena receiver GPS merupakan resultan dari sinyal
yang langsung dari GPS dan sinyal yang dipantulkan oleh benda-benda di
sekliling receiver GPS.
Dalam kaitannya dengan ketelitian penentuan posisi dengan GPS,
terdapat dua level ketelitian yang diberikan oleh GPS, yaitu SPS (Standard
Positioning Service) dan PPS (Precise Positioning Service). SPS merupakan
layanan standar yang diberikan oleh GPS kepada siapa saja tanpa dipungut
biaya. Tingkat ketelitian yang diberikan oleh layanan ini adalah ± 100 m pada
saat kebijakan SA (Selective Availability) masih berlaku dan ± 20 m setelah
kebijakan SA dihapus (1 Mei 2000, 00:00 EDT). Sedangkan PPS merupakan
jenis layanan yang hanya dikhususkan untuk pihak militer Amerika dan
pihak-pihak lain yang diizinkan dengan tingkat ketelitian yang lebih tinggi dari tingkat
ketelitian SPS.
Receiver GPS memiliki format keluaran sebanyak lima (5) jenis yaitu
NMEA 0180, NMEA 0182, NMEA 0183, AVIATION, dan PLOTTING [Sitio, 1997].
Format data tersebut ditetapkan oleh NMEA (National Maritime Electronic
Association) dan dapat dikoneksikan ke komputer melalui port komunikasi serial
dengan menggunakan kabel RS-232.
Data keluaran dalam format NMEA 0183 berbentuk kalimat (string) yang
merupakan rangkaian karakter ASCII 8 bit. Setiap kalimat diawali dengan satu
karakter '$' , dua karakter Talker ID, tiga karakter Sentence ID, dan diikuti oleh
data fileds yang masing-masing dipisahkan oleh koma serta diakhiri oleh optional
cheksum dan karakter cariage return/line feed (CR/LF). Jumlah maksimum
karakter dihitung dari awal kalimat ($) sampai dengan akhir kalimat (CR/LF)
adalah 82 karakter.
Format dasar data NMEA 0183:
keterangan:
<CR><LF> = carriage return/line feed, menandakan akhir dari kalimat.
[Sumber: http://vancouver-webpages.com/peter/nmeafaq.txt]
beberapa jenis Talker ID yang ada pada spesifikasi NMEA 0183 adalah:
- GP, untuk data keluaran GPS receiver,
- LC, untuk data keluaran Loran-C receiver,
- OM, untuk data keluaran Omega Navigation receiver.
Gambar 2.1. Keluaran NMEA 0183 dari receiver GPS yang teridentifikasi pada Hyperterminal
2.2 Aplikasi GPS untuk Pemantauan Armada Kendaraan (Fleet Management System)
Aplikasi GPS dalam bidang transportasi khususnya bidang pemantauan
armada kendaraan (fleet management system) merupakan bagian dari teknologi
Intellegent Transportation System (ITS). Teknologi ITS merupakan integrasi dari
beberapa teknologi, seperti teknologi penentuan posisi, sistem informasi, kontrol,
dan elektronik [Abidin, 2000]. Dalam teknologi ITS, GPS berfungsi sebagai
teknologi penentuan posisi dan SIG berperan sebagai teknologi sistem
informasinya.
Pada dasarnya teknologi fleet management system terdiri atas tiga
subsistem yaitu subsistem navigasi kendaran, subsistem komunikasi data dan
Gambar 2.2. Arsitektur Fleet Management System
2.2.1 Subsistem Navigasi Kendaraan
Subsistem navigasi kendaraan terdiri dari seperangkat alat (in-vehicle
unit) yang terdiri dari alat penentu posisi (receiver GPS) dan perangkat
komunikasi data. Biasanya perangkat tersebut sudah terintegrasi menjadi satu
dan dapat beroperasi secara individual dengan menggunakan mikrokontroler.
Receiver GPS berfungsi untuk menentukan posisi kendaraan beserta
parameter-parameter lainnya seperti waktu dan kecepatan (jika diperlukan) dalam selang
waktu tertentu yang diatur oleh mikrokontroler. Data-data tersebut kemudian
dikirimkan ke pusat kontrol dengan menggunakan perangkat komunikasi.
2.2.2 Subsistem Komunikasi Data
Subsistem komunikasi data berfungsi sebagai penghubung antara
kendaraan dan pusat kontrol dan memegang peranan paling penting dalam
teknologi fleet management system. Komunikasi antara pusat kontrol dan
kendaraan dapat berupa komunikasi satu arah maupun komunikasi dua arah.
mengirimkan data posisi kendaraan ke pusat kontrol sedangkan pada komunikasi
dua arah, selain kendaraan mengirimkan data posisinya, pusat kontrol juga dapat
mengirimkan informasi-informasi tertentu ke kendaraan seperti informasi rute
terbaik, zona berbahaya, dan informasi-informasi lainnya.
Seiring dengan berkembangnya teknologi komunikasi data, saat ini
terdapat beberapa alternatif komunikasi data yang digunakan dalam teknologi
fleet management system antara lain:
Selular (GSM/CDMA)
Radio (VHF/UHF)
Satelit komunikasi (Inmarsat/OrbComm)
Masing-masing teknologi komunikasi tersebut memiliki kelebihan dan
kekurangan masing-masing dari segi jangkauan komunikasi dan biaya (cost).
Komunikasi dengan menggunakan jaringan komunikasi radio memiliki cakupan
wilayah yang terbatas dan membutuhkan adanya line of sight antara kendaran
dan pusat kontrol namun dapat diimplementasikan dengan biaya yang relatif
murah. Komunikasi selular, misalnya via SMS (Short Message Service) juga
terbatas pada cakupan area tertentu dan sangat bergantung infrastruktur
jaringan dari operator selular yang digunakan dan biaya implementasinya cukup
mahal. Sebaliknya komunikasi satelit dapat menjangkau area yang sangat luas
namun membutuhkan biaya yang sangat mahal.
2.2.3 Subsistem Pusat Kontrol
Subsistem ini berfungsi untuk memantau dan mengelola armada
kendaraan. Data posisi yang dikirimkan oleh masing-masing kendaraan
kemudian ditampilkan pada peta digital sehingga pihak pengelola dapat dengan
mudah memantau pergerakan kendaraan-kendaraan tersebut. Selain memantau
pergerakan dan kondisi kendaran, pusat kontrol juga bertanggung jawab dalam
cuaca, keadaan lalulintas, jalur terbaik, serta pengambilan keputusan untuk
semua manajemen dan eksternal organisasi transportasi [Abidin, 2000].
2.3 Teknologi World Wide Web (WWW)
World Wide Web (WWW) atau web adalah salah satu jenis layanan yang
disediakan oleh internet disamping jenis layanan lainnya seperti FTP (File
Transfer Protocol), Email, Telnet, News Group dan lain-lain. Internet sendiri
merupakan sekumpulan jaringan komputer yang saling berhubungan satu
dengan yang lainnya dan diatur oleh sebuah protokol komunikasi yang
dinamakan TCP/IP (Transmision Control Protocol / Internet Protocol). Protokol ini
mengatur komunikasi data antara komputer-komputer yang terhubung di jaringan
internet sehingga data yang dikirimkan dari satu komputer dapat disampaikan
dengan tepat ke komputer lainnya.
Web menyediakan informasi dalam bentuk hypertext . Hypertext
merupakan sistem pengkodean yang menghubungkan suatu sumber informasi
kepada sumber informasi lainya. Informasi yang ditampilkan pada halaman web
dapat berupa kumpulan teks, gambar, audio, video dan lain sebagainya. Agar
dapat menampilkan informasi yang terdapat dalam web, pengguna memerlukan
web browser yang terpasang pada komputernya. Web broswer merupakan
perangkat lunak (software) yang berfungsi untuk mengeinterpretasikan
kode-kode hypertext yang terkandung dalam web menjadi informasi yang dapat
dibaca atau dimengerti oleh pengguna. Beberapa contoh web browser yang
sering digunakan adalah internet explorer, netscape navigator, opera, mozila,
lynx dan lain-lain.
Web bekerja berdasarkan terminologi client-server . Dalam terminologi
client-server, server adalah host (komputer) yang menyediakan layanan atau
mengakses data atau layanan yang disediakan oleh server. Dalam konteks web,
yang berfungsi sebagai server adalah web server sedangkan client adalah web
browser.
Web server dan web browser berkomunikasi melalui protokol HTTP
(Hypertext Transfer Protocol) yang bekerja berdasarkan prinsip request and
response. Request merupakan proses client meminta informasi dari server
sedangkan response adalah proses server menanggapi atau melayani
permintaan client.
Pada saat pengguna mengakses halaman tertentu dari sebuah situs web,
protokol HTTP mengirimkan pesan (message) ke web server yang dinamakan
HTTPrequest. Web server kemudian mengecek halaman web yang diminta, jika
tersedia maka halaman tersebut dikirimkan ke client, namun jika web server tidak
menemukan halaman yang diminta maka ia akan mengirimkan halaman yang
berisi pesan error (dalam kasus ini Error 404: Page Not Found) ke client. Pesan
yang dikirim dari server sebagai tanggapan dari permintaan client dinamakan
HTTP response. Baik HTTP request maupun HTTP response terdiri dari tiga
bagian yaitu request/response line, HTTP header dan HTTP body seperti yang
digambarkan pada gambar 2.3.
Setiap dokumen atau halaman web memiliki alamat yang unik. Untuk
mengidentifikasi lokasi dari dokumen atau halaman web tersebut digunakan URL
(Uniform Resource Locator), yaitu sekumpulan karakter alfanumerik yang
merepresentasikan lokasi atau alamat suatu sumber informasi pada internet
secara unik dan bagaimana sumber tersebut seharusnya diakses. Sintaks umum
dari URL adalah:
Keterangan:
o Protokol = mekanisme yang digunakan oleh web browser untuk
berkomunikasi dengan sumber informasi, misalnya: http.
o Host = nama host atau alamat IP dari web server.
o Port = tempat logikal untuk melakukan koneksi, dinotasikan
dalam bentuk bilangan bulat positf. HTTP menggunakan port 80
sebagai port standar (well known port).
o Path = lokasi dari sumber informasi/dokumen yang terdapat pada
host.
o Argument = parameter tambahan untuk mengakses informasi
tertentu.
Contoh dari sintaks URL adalah sebagai berikut:
http://www.arc.itb.ac.id:80/index.php?menu=news
2.4 Peta Berbasis Web
Perkembangan teknologi internet yang pesat saat ini memungkinkan
penyebaran informasi, komunikasi dan transfer data dengan cepat dalam skala
global. Perkembangan ini berpengaruh kepada perkembangan teknologi peta
digital, dimana pada awalnya peta digital hanya dapat ditampilkan pada
perangkat-perangkat lunak CAD dan SIG seperti AutocadMap, Arcview, Mapinfo
dan lain-lain, kini dapat ditampilkan baik secara statik maupun dinamis pada
halaman web.
Berdasarkan tingkat interaktifitas dan fungsionalitasnya, peta berbasis
web dapat digolongkan dalam dua generasi, yaitu peta berbasis web generasi
pertama dan peta berbasis web generasi kedua [Gebremariam, 2001].
2.4.1 Peta Berbasis Web Generasi Pertama
Peta berbasis web generasi pertama memiliki karakteristik relatif
sederhana dalam hal interaktifitas dan fungsionalitas, serta memuat informasi
yang terbatas. Peta berbasis web generasi pertama dapat digolongkan dalam
dua kategori yaitu peta statik dan peta fleksibel.
Peta Statik
Peta statik biasanya ditampilkan pada halaman web dalam bentuk gambar
dalam format yang didukung oleh web seperti JPEG, GIF, dan PNG.
Pengguna hanya dapat melihat informasi yang terdapat dalam gambar
tersebut tanpa ada interaksi dengan gambar tersebut.
Peta Fleksibel
Peta fleksibel biasanya ditampilkan pada halaman web dalam bentuk
Portable File Format (PDF). Peta ini memiliki kemampuan dalam
memperbesar (zoom in) dan memperkecil (zoom out) ukuran gambar serta
visualisasi saja, artinya informasi yang terkandung baik sebelum dan
sesudah perbesaran adalah sama.
2.4.2 Peta Berbasis Web Generasi Kedua
Peta berbasis web generasi kedua memiliki kemampuan yang lebih
dibandingkan dengan peta berbasis web generasi pertama. Selain memiliki
kemampuan-kemampuan dasar navigasi seperti memperbesar dan memperkecil
ukuran, peta berbasis web generasi kedua memungkinkan pengguna untuk
berinteraksi dengan data spasial maupun data atribut. Peta berbasis web
generasi kedua dapat digolongkan dalam dua kategori yaitu peta dinamis dan
peta interaktif.
Peta Dinamis
Peta dinamis memiliki kemampuan-kemampuan navigasi seperti
memperbesar dan memperkecil ukuran serta menggeser gambar.
Kemampuan-kemampuan tersebut bukan hanya untuk tujuan visualisasi saja,
artinya informasi yang terkandung pada peta setalah diperbesar dan
diperkecil adalah berbeda.
Peta Interaktif
Peta interaktif memiliki tingkat interaktifitas dan fungsionalitas yang lebih
tinggi dari peta dinamis. Peta interaktif ditampilkan dalam bentuk layer-layer
feature seperti jalan, hutan, sungai dan lain-lain. Pengguna dapat memilih
layer-layer yang akan ditampilkan serta melalukan query terhadap data
atribut.
2.5 Komunikasi Paket Radio
Paket radio adalah metoda komunikasi paket data antara komputer
dua konsep komunikasi yaitu radio communication dan packet switching. Radio
communication adalah sistem radio komunikasi seperti yang kita kenal saat ini
sedangkan packet switching adalah jenis komunikasi data dimana data
dikirimkan dari satu komputer ke komputer yang lain dalam bentuk paket data
atau penggalan-penggalan data yang pendek.
Agar komunikasi data dapat berjalan dengan baik maka perlu ada suatu
aturan yang terdefinisi dan perlu diikuti oleh semua pihak yang ingin
berkomunikasi. Dalam komunikasi paket radio aturan tersebut dikenal sebagai
protokol AX.25. AX.25 adalah protokol komunikasi radio yang dikembangkan dari
protokol X.25. Protokol ini mengatur komunikasi paket data sehingga beberapa
stasiun dapat berkomunikasi secara simultan melalui kanal frekuensi yang sama.
Metode akses channel yang digunakan oleh protokol AX.25 adalah
CSMA/CD (Carrier Sense Multiple Accsess/Collision Detection). Dalam metode
ini, stasiun yang hendak mengirimkan data pada suatu channel frekuensi tertentu
harus menunggu sampai channel tersebut kosong atau tidak digunakan lagi oleh
stasiun lain (Carrier Sense) . Karena sebuah channel frekuensi dapat dipakai
oleh beberapa stasiun secara simultan (Multiple Accsess) maka kemungkinan
tabrakan data (collision) dapat saja terjadi dan menyebabkan rusak atau
hilangnya data (data loss), dan jika hal ini terjadi maka kedua stasiun akan
berhenti mengirimkan data menunggu dalam selang waktu tertentu untuk
mengirimkan kembali data tersebut. Mekanisme ini menyebabkan data yang
dikirimkan dapat dijamin sampai ke tempat tujuan tanpa adanya kerusakan data
Gambar 2.4 Komunikasi paket radio
Jaringan komunikasi paket radio terdiri dari beberapa peralatan
penunjang, antara lain (gambar 2.4):
Komputer, yang menjalankan aplikasi radio paket.
TNC (Terminal Node Controller), yang terdiri dari micro-processor, modem
dan rangkaian untuk mengubah komunikasi serial dari komputer ke protokol
paket radio yang digunakan. TNC merakit data yang diterima dari komputer,
melakukan perhitungan koreksi kesalahan dengan metoda CRC (Cylic
Redundancy Check), membagi data menjadi paket-paket data dan
memodulasinya menjadi frekuensi audio (sinyal analog) untuk kemudian
dikirimkan ke pemancar radio . Sebaliknya TNC juga mendemodulasi sinyal
analog dari radio menjadi sinyal digital (byte stream) untuk dikirim ke
komputer. Kecepatan pengiriman data yang digunakan pada umumnya pada
kecepatan 1200 bps untuk paket VHF/UHF dan 300 bps untuk paket HF.
Seluruh implementasi AX.25 pada awalnya diletakkan dalam TNC. Namun
karena alasan kompatibilitas, saat ini TNC hanya berfungsi sebagai konverter
antara sinyal RS-232 yang asinkron dengan sinyal data dari dan ke modem
pada komputer. Alternatif lain selain TNC adalah soundcard modem yang
memanfaatkan soundcard sebagai media fisik, dan dilengkapi oleh sebuah
perangkat lunak yang akan mengubah fungsi soundcard ini menjadi modem
radio. Pada saat ini kecepatan pengiriman data dengan soundcard modem
berkisar antara 1200 – 9600 bps.
Radio
Radio berfungsi untuk mengirim dan menerima data. Frekuensi yang
digunakan dalam komunikasi radio diantaranya adalah VHF (Very High
Frequency) pada rentang frekuensi 144-148 Mhz (band 2 meter), UHF (Ultra
High Frequency) pada rentang frekuensi 430-435 Mhz (band 70 cm) dan HF
(High Frequency) pada rentang frekuensi 3-30 Mhz. Frekuensi VHF/UHF
biasanya digunakan untuk paket data dengan kecepatan 1200/2400 bps dan
dapat mencapai jarak jangkau 10-100 km sedangkan frekuensi HF digunakan
untuk paket data 300 bps dan sering digunakan untuk komunikasi data jarak
BAB III
ANALISIS DAN PERANCANGAN APLIKASI
WEB
UNTUK
PEMANTAUAN PERGERAKAN KENDARAAN
3.1 Analisis Sistem
Analisis sistem bertujuan untuk mengidentifikasi
permasalahan-permasalahan yang ada pada sistem dimana aplikasi dibangun yang meliputi
perangkat keras (hardware), perangkat lunak (software) dan pengguna. Analisis
ini diperlukan sebagai dasar bagi tahapan perancangan sistem. Analisis sistem
meliputi identifikasi permasalahan, spesifikasi aplikasi, spesifikasi pengguna,
dan lingkungan operasi.
3.1.1 Identifikasi Masalah
Dalam sistem tracking GPS untuk pemantauan armada kendaraan (Fleet
Management System), kendaraan-kendaraan yang bergerak dilengkapi dengan
alat penentuan posisi yaitu receiver GPS yang berfungsi untuk menentukan
posisi dari kendaraan tersebut. Data posisi yang diperoleh dari pengukuran GPS
kemudian dikirimkan ke pusat kontrol melalui hubungan komunikasi data. Dalam
tugas akhir ini, media komunikasi data yang digunakan adalah media komunikasi
radio paket.
Pada pusat kontrol posisi dari masing-masing kendaraan divisualisasikan
pada peta elektronik untuk keperluan pemantauan dan pengelolaan oleh pihak
pengelola. Untuk aplikasi yang berbasis web, visualisasi posisi kendaraan adalah
dalam bentuk halaman-halaman web yang dapat diakses oleh pengguna dengan
menggunakan web browser dengan syarat pengguna memiliki koneksi ke server
yang menyediakan layanan visualisasi tersebut baik secara lokal dalam suatu
Permasalahan-permasalahan yang dapat diidentifikasi pada sistem ini
adalah sebagai berikut:
Penyaringan data posisi, kecepatan, tanggal, dan waktu dari data keluaran
receiver GPS.
Format peta digital jalan yang ada yaitu SHP, tidak dapat ditampilkan pada
halaman web.
Permasalahan visualisasi posisi kendaraan yang datanya bersifat dinamis.
Pada umumnya peta digital jalan yang ada berada pada sistem koordinat
proyeksi UTM, sedangkan data posisi hasil ukuran GPS berada dalam sistem
koordinat geodetik.
Solusi untuk permasalahan – permasalahan di atas adalah sebagai
berikut:
Receiver GPS setiap dua detik secara periodik mengeluarkan sederetan
karakter (string) ASCII NMEA 0183. Informasi yang terdapat pada data
tersebut bermacam-macam yaitu data posisi (lintang dan bujur), kecepatan,
arah, waktu pengamatan, jumlah satelit yang teramati dan lain sebagainya.
Salah satu string informasi adalah baris yang diawali oleh karakter $GPRMC.
String GPRMC adalah data minimum GPS yang direkomendasikan oleh
NMEA. Penyaringan data posisi, kecepatan, tanggal, dan waktu dilakukan
dari string tersebut. Oleh karena itu perlu dibuat suatu interface untuk
menangani proses penyaringan tersebut.
Format peta digital jalan yang ada adalah dalam format SHP (Esri shape file).
Format tersebut tidak dapat ditampilkan pada sebuah halaman web. Untuk
dapat menampilkannya format tersebut harus diubah ke dalam format
gambar yang didukung oleh web misalnya JPG, GIF dan PNG. Oleh karena
itu dibutuhkan perangkat lunak yang berfungsi sebagai map server, karena
harus memungkinkan overlay antara peta jalan dan posisi kendaraan, serta
proses query terhadap basis data atribut, sama halnya dengan perangkat –
perangkat lunak SIG yang berbasis desktop (desktop application). Dalam
tugas akhir ini digunakan perangkat lunak Map Server yang bersifat gratis
dan open source.
Untuk mengakomodasi data posisi kendaraan yang dinamis, maka data
posisi kendaraan disimpan dalam format basis data spasial bukan dalam
format file sehingga memudahkan proses penyimpanan, updating, dan
pengaksesan.
Untuk mengatasi permasalahan perbedaan sistem koordinat, aplikasi harus
mendukung dua jenis sistem koordinat yaitu sistem koordinat proyeksi UTM
dan sistem koordinat Geodetik. Apabila peta yang digunakan dalam sistem
koordinat UTM maka data hasil ukuran diproyeksikani terlebih dahulu
sebelum dimasukkan ke dalam basis data.
3.1.2 Spesifikasi Aplikasi
Aplikasi web yang akan dibangun memiliki kemampuan sebagai berikut:
Dapat menampilkan posisi kendaraan dengan latar belakang peta jalan.
Posisi yang ditampilkan adalah posisi terakhir yang dikirim oleh kendaraan.
Dapat menampilkan informasi posisi kendaraan pada saat tertentu
berdasarkan query yang dilakukan pengguna.
Dapat menampilkan track log baik dalam bentuk tabel maupun dalam bentuk
visualisasi peta.
Memiliki kemampuan navigasi peta seperti zoom in, zoom out, pan, scalebar,
dan legenda.
User friendly
Aplikasi ini ditujukan untuk digunakan oleh semua pihak yang ingin
memperoleh informasi mengenai pergerakan posisi kendaraan secara online
melalui internet khususnya pihak pengelola armada kendaraan.
3.1.4 Lingkungan Operasi
Untuk membangun aplikasi web sesuai dengan spesifikasi kebutuhan,
dibutuhkan lingkungan operasi sebagai berikut:
Sistem operasi Linux.
Sistem operasi ini dipilih karena bersifat bebas (free) dan open source.
Web Server.
Web server digunakan untuk memberikan layanan web sehingga dapat
diakses oleh pengguna baik yang berada pada jaringan lokal maupun pada
jaringan internet. Web server yang digunakan adalah Apache. Perangkat
lunak ini digunakan karena bersifat gratis dan memiliki kemampuan kerja
yang tinggi dibanding dengan perangkat lunak web server lainnya.
Map Server
Map Server digunakan sebagai perangkat lunak visualisasi peta digital jalan
dan posisi kendaraan.
Alasan dipilih perangkat lunak ini adalah:
9 Bersifat gratis dan open source.
9 Mendukung format peta digital SIG yang banyak digunakan yaitu SHP.
9 Selain format SHP, Map Server juga mendukung format data yang
berasal dari basis data PostgreSQL/PostGIS sehingga memungkinkan
peta digital disimpan dalam basis data dan terintegrasi dengan data-data
atribut.
9 Memiliki API dalam bahasa pemograman PHP.
PostgreSQL adalah perangkat lunak DBMS sedangkan PostGIS adalah
perangkat lunak tambahan (third party) yang berfungsi untuk menambah
kemampuan dari PostrgreSQL dalam menangani basis data spasial. Alasan
dipilihnya perangkat lunak ini adalah karena bersifat gratis dan satu-satunya
DBMS yang didukung oleh Map Server.
Interpreter PHP
PHP adalah bahasa pemrograman server side yang bekerja pada sisi server
yang berfungsi untuk menangani request dari pengguna dan berkomunikasi
dengan Map Server serta DBMS PostgreSQL melalui API yang
disediakannya. Perangkat lunak ini digunakan karena bersifat gratis dan open
source.
3.2 Perancangan Sistem
Tahap perancangan sistem bertujuan untuk mencari bentuk yang optimal
dari aplikasi yang akan dibangun dengan mempertimbangkan berbagai
faktor-faktor permasalahan dan kebutuhan yang ada pada sistem seperti yang telah
ditetapkan pada tahap analisis. Upaya yang dilakukan adalah dengan berusaha
mencari kombinasi penggunaan teknologi, perangkat keras (hardware), dan
perangkat lunak (software) yang tepat sehingga diperoleh hasil yang optimal dan
mudah untuk diimplementasikan.
3.2.1 Batasan Perancangan
Perancangan sistem yang akan dibangun ini dibatasi pada hal-hal
sebagai berikut:
Receiver GPS yang digunakan pada kendaraan untuk penentuan posisi
Aplikasi web dirancang untuk berjalan pada sistem operasi Linux dengan
perangkat lunak pendukung Map Server, PHP dan PostgreSQL/PostGIS
yang bersifat gratisdan open source.
Aplikasi dirancang untuk dapat digunakan oleh pengguna tanpa ada
mekanisme proteksi atau autentifikasi.
3.2.2 Perancangan Arsitektur Sistem
Arsitektur sistem yang dibangun dibagi dalam tiga subsistem yaitu
subsistem navigasi kendaraan, sub sistem komunikasi data dan sub sistem pusat
kontrol.
3.2.2.1 Sub Sistem Navigasi Kendaraan
Sub sistem navigasi kendaraan berfungsi sebagai penentu posisi,
kecepatan, dan waktu kendaraan untuk kemudian dikirimkan ke subsistem pusat
kontrol melalui sub sistem komunikasi data. Desain sub sistem navigasi
kendaraan divisualisasikan pada gambar di bawah ini:
Gambar 3.1 Desain sub sistem navigasi kendaraan
Sub sistem ini terdiri receiver GPS sebagai alat penentu posisi,
kecepatan, dan waktu, serta interface komunikasi data yang berfungsi untuk
menyaring data yang diperoleh dari receiver GPS untuk kemudian dikirimkan ke
pusat kontrol. Untuk menjalankan interface komunikasi kendaraan, digunakan
komputer atau laptop.
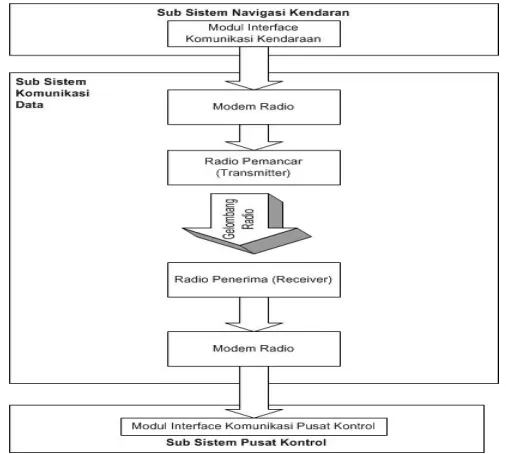
Sub sistem komunikasi data berfungsi sebagai penghubung antara
subsistem navigasi kendaraan dan sub sistem pusat kontrol. Data navigasi
kendaraan (posisi, kecepatan, tanggal, dan waktu) yang diperoleh pada sub
sistem navigasi kendaraan dikirimkan melalui sub sistem ini ke sub sistem pusat
kontrol. Sub sistem ini berhubungan dengan sub sistem navigasi kendaraan dan
sub sistem pusat kontrol melalui modul interface komunikasi yang ada pada
kedua sub sistem tersebut. Desain sub sistem komunikasi data ini dapat dilihat
pada gambar 3.2
Gambar 3.2 Desain sub sistem komunikasi data
Sub sistem ini terdiri dari modem radio yang ditempatkan pada kendaraan
dan pusat kontrol serta pemancar radio (transmitter) yang ditempatkan di
kendaraan dan radio penerima (receiver) yang ditempatkan di pusat kontrol. Data
hasil penyaringan dari modul interface komunikasi dikirim ke modem radio untuk
dimodulasi menjadi sinyal analog dan dikirim ke radio pemancar untuk
dipancarkan. Pada pusat kontrol, data yang dikirim diterima oleh radio penerima
dan diteruskan ke modem radio untuk didemodulasi menjadi sinyal digital dan
Dalam tugas akhir ini, peralatan komunikasi yang digunakan adalah
peralatan komunikasi paket radio satu arah untuk satu kendaraan (one to one)
sehingga tidak memungkinkan untuk digunakan dalam pemantauan banyak
kendaraan secara bersamaan yang disebabkan karena keterbatasan dari
peralatan yang tersedia. Namun demikian, aplikasi yang dibangun tetap
dirancang untuk digunakan dalam pemantaun beberapa kendaraan secara
bersamaan.
Beberapa hal penting yang harus diperhatikan sehubungan komunikasi
data melalui radio ini adalah:
`Format data pengiriman
Data posisi, kecepatan, tanggal, dan waktu kendaraan yang akan dikirim ke
pusat kontrol harus berada dalam format tertentu untuk mempermudah
proses pengolahan data di pusat kontrol. Dalam aplikasi tracking GPS untuk
pemantauan kendaraan, untuk membedakan kendaraan yang satu dengan
yang lainnya, setiap kendaraan diberi ID yang unik. Oleh karena itu, data
yang akan dikirim harus disertai dengan ID dari kendaraan.
Format data pengiriman yang digunakan adalah:
Keterangan:
Tabel 3.1 Format data pengiriman
Field Keterangan
$ awal kalimat ID ID kendaraan
tanggal tanggal pengukuran (tanggal, bulan, tahun)
jam waktu (jam, menit, detik ) pengukuran dalam format UTC
lintang posisi lintang kendaraan
bujur posisi bujur kendaraan b letak bujur (Timur/Barat) kecepatan kecepatan kendaraan
Sebagai contoh, format data untuk kendaraan dengan ID VH001, pengukuran
pada tanggal 22 Desember 2003, jam 10:22:21 dengan posisi lintang
-6.22112 dan bujur 105.12333:
$VH001,221203,102221,0622.112,S,10512.333,E,004.2
Kecepatan pengiriman data
Kecepatan pengiriman data merupakan jumlah bit per detik (bps) yang dapat
dikirimkan oleh modem radio ke pemancar radio. Kecepatan pengiriman data
ini biasanya dinyatakan dalam satuan bit per second (bps). Pemilihan
kecepatan pengiriman data ini bergantung pada jumlah data yang akan
dikirim.
Receiver GPS setiap dua detik mengeluarkan string GPRMC yang memiliki
ukuran ± 70 byte. Tidak semua data pada baris string GPRMC dikirimkan ke
pusat kontrol tetapi hanya data posisi, kecepatan, dan waktu ditambah ID
kendaraan seperti pada format data pengiriman yang telah dijelaskan
sebelumnya. Berdasarkan pengamatan, jumlah data dalam format tersebut
berkisar 50 byte = 400 bit (8 bit/byte x 50 byte). Untuk itu diperlukan modem
radio dengan kecepatan minimal 1200 bps.
Reliabilitas pengiriman data
Untuk menjamin kualitas data yang dikirim, dipilih modem radio yang memiliki
fasilitas protokol AX.25. AX.25 adalah protokol komunikasi radio yang
mengatur komunikasi antar dua buah stasiun radio atau lebih agar data yang
dikirimkan dijamin sampai ke tujuan dan tidak mengalami kerusakan.
Untuk menjamin kualitas pengiriman data, dipilih channel frekuensi radio
yang benar-benar bersih dari gangguan frekuensi lain untuk mencegah
tabrakan frekuensi yang disebabkan oleh penggunaan satu channel frekuensi
secara bersamaan yang dapat menyebakan rusaknya data yang dikirim.
Dalam tugas akhir ini digunakan channel frekuensi radio yang berada dalam
rentang frekuensi radio amatir yaitu pada band 2 meter (VHF / 144-148 Mhz).
Pengguna radio amatir dalam rentang frekuensi ini cukup ramai, oleh karena
itu diusahakan sebaik mungkin untuk menggunakan channel frekuensi yang
belum digunakan oleh pengguna lain.
3.2.2.3 Sub Sistem Pusat Kontrol
Sub sistem pusat kontrol merupakan pusat pengolahan data, visualisasi
data, dan kontrol terhadap kendaraan. Data posisi yang dikirimkan oleh
masing-masing kendaraan diolah dan divisualisasikan sehingga pihak pengelola
mempunyai kemudahan untuk mengelola pergerakan kendaraan tersebut.
Arsitektur dari sub sistem ini dapat dilihat pada gambar 3.3
Sub sistem ini terdiri dari web server yang berfungsi sebagai pusat
pengolahan data, penyimpanan data, dan tempat berjalannya aplikasi web.
Server terhubung dengan jaringan lokal (LAN) yang ada di pusat kontrol dan
jaringan internet melalui koneksi TCP/IP. Karena aplikasi yang dibangun adalah
aplikasi yang berbasis web, pengguna baik dalam jaringan lokal maupun di luar
jaringan lokal (internet) membutuhkan web browser untuk menjalankan aplikasi
Gambar 3.3 Desain sub sistem pusat kontrol Mekanisme kerja dari sub sistem ini adalah sebagai berikut:
Web server menerima data yang dikirim dari kendaraan melalui modem radio
yang terhubung denganya melalui port komunikasi serial menggunakan
kabel RS-232.
Data tersebut kemudian diolah dan disimpan ke dalam basis data
PostgreSQL/PostGIS oleh modul interface komunikasi pusat kontrol.
Jika ada request dari pengguna (web browser), web server memberikan
response dengan mengeksekusi program aplikasi (php) dan berkomunikasi
dengan Map Server dan DBMS PostgreSQL untuk menghasilkan gambar
peta jalan dan posisi untuk kemudian didownload oleh client.
3.2.3 Perancangan Aplikasi Web
Pada bagian ini akan dibahas mengenai proses perancangan aplikasi
web dengan mempertimbangkan kebutuhan-kebutuhan atau spesifikasi yang
perancangan modul aplikasi, perancangan basis data dan perancangan
antarmuka.
3.2.3.1 Perancangan Modul Aplikasi
Modul aplikasi dibagi menjadi tiga buah modul yaitu modul visualisasi
data, modul query posisi, dan modul basis data.
3.2.3.1.1 Modul Visualisasi Data
Modul ini berfungsi untuk memvisualisasikan peta digital jalan dan posisi
kendaraan beserta atribut-atribut peta seperti peta referensi, legenda, dan
scalebar. Modul ini dibangun dengan menggunakan API PHP/MapScript. Dengan
MapScript dapat dibuat objek peta yang kemudian dapat dirender menjadi format
PNG [Romi, 2003]. Sumber data untuk peta jalan adalah file SHP sedangkan
sumber data untuk posisi kendaraan adalah tabel basis data
PostgreSQL/PostGIS. Alur proses modul ini dapat dilihat pada gambar 3.4 di
bawah ini:
Gambar 3.4. Alur proses modul visualisasi data 3.2.3.1.2 Modul Query Posisi
Modul ini berfungsi untuk menangani proses query yang dilakukan
pengguna pada saat mengklik salah satu posisi kendaraan maupun beberapa
informasi mengenai kendaraan yang berupa id kendaraan, posisi, kecepatan dan
waktu serta visualisasi dari posisi kendaraan yang diquery tersebut. Modul ini
dibangun dengan menggunakan API PHP/MapScript. Alur kerja modul ini dapat
dilihat pada gambar 3.5.
Gambar 3.5. Alur kerja modul query posisi
Pengguna mengquery satu objek kendaraan dengan cara mengklik objek
tersebut pada peta (query by point) atau menggeser (drag) kursor sehingga
membentuk area segi empat (query by rect) pada peta. Browser kemudian
mengirimkan parameter-parameter query berupa koordinat titik (x,y) atau
koordinat titik sudut segi empat Xmin,Ymin,Xmax,Ymax dalam satuan pixel ke
server untuk di proses. Pada server, modul query posisi kemudian mengkonversi
satuan koordinat dari pixel ke satuan koordinat yang sebenarnya (meter atau
derajati). Setelah dikonversi, Map Server melakukan query ke tabel basis data
dikirimkan ke browser, jika tidak maka pesan kesalahan akan dikirimkan ke
browser.
3.2.3.1.3 Modul Basis Data
Modul ini berfungsi melakukan interaksi dengan DBMS PostgreSQL.
Modul ini terdiri dari fungsi-fungsi utilitas yang berhubungan dengan akses
database yaitu membuat koneksi ke database dan query unsur-unsur tabel
dalam database.
3.2.3.2 Perancangan Basis Data
Aplikasi yang akan dibangun membutuhkan basis data untuk menyimpan
data-data spasial beserta data atribut. Agar basis data yang dibangun dapat
diimplementasikan dengan baik, maka terlebih dahulu dilakukan proses
perancangan basis data. Proses perancangan basis data meliputi pendefinisian
entitas, hubungan antar entitas dan pembentukan tabel.
3.2.3.2.1 Pendefinisian Entitas
Entitas-entitas yang terlibat adalah sebagai berikut
Entitas kendaraan.
Entitas ini menyimpan informasi mengenai kendaraan yang dipantau yaitu
berupa id kendaraan, deskripsi kendaraan, dan pengemudi.
Entitas posisi kendaraan
Entitas ini menyimpan informasi mengenai pergerakan kendaraan yang
dipantau, yang terdiri dari posisi (x dan y atau lintang dan bujur), kecepatan,
tanggal, dan waktu.
3.2.3.2.2 Hubungan Antar Entitas
Hubungan antara entitas-entitas yang telah didefinisikan di atas
Gambar 3.6. Diagram ER
Tidak semua kendaraan memiliki posisi karena tidak semua kendaraan dipantau
pada suatu saat karena alasan-alasan tertentu. Setiap kendaran dapat memiliki
lebih dari satu posisi karena posisi kendaraan yang terus berubah karena
bergerak.
3.2.3.2.3 Pembentukan Tabel
Tabel yang dapat dibentuk berdasarkan diagram ER di atas adalah:
Tabel kendaraan(kendaraan_id,...).
Tabel posisi kendaraan(posisi_id, kendaraan_id,...)
Perlu diketahui bahwa posisi kendaraan yang akan ditampilkan adalah
posisi terakhir yang dikirim oleh kendaraan. Keseluruhan posisi kendaraan hanya
akan ditampilkan jika pengguna ingin melihat track log dari kendaraan. Dalam
implementasinya jumlah record dari tabel posisi akan berjumlah besar karena
semua data pergerakan posisi dari semua kendaraan akan disimpan dalam tabel
ini. Untuk menampilkan posisi terakhir, DBMS harus mencari record terakhir dari
masing-masing kendaraan dalam tabel tersebut, hal ini akan memakan waktu
yang cukup lama dan menjadi tidak efisien.
Untuk mengatasi masalah ini, tabel posisi kendaraan dipecah menjadi
dua yaitu tabel posisi terakhir dan tabel track log. Tabel posisi terakhir hanya
menyimpan posisi terakhir dari masing-masing kendaraan dan isinya terus
berubah sesuai dengan pergerakan kendaran. Sedangkan tabel track log
menyimpan semua record dari pergerakan posisi masing-masing kendaraan.
Karena aplikasi yang akan dibangun menggunakan dua jenis sistem
jenis sistem koordinat tersebut dengan susunan kolom yang berbeda. Tabel akhir
yang terbentuk adalah sebagai berikut:
Tabel 3.2 Tabel akhir hasil perancangan Nama Tabel Fungsi
tVehicle Menyimpan informasi kendaraan
tLastPost_latlon Menyimpan posisi terakhir dari masing-masing kendaraan dalam sistem koordinat geodetik (lintang-bujur)
tTrackLog_latlon Menyimpan posisi dari pergerakan masing-masing kendaraan dalam sistem koordinat geodetik
tLastPost_utm Menyimpan posisi terakhir dari masing-masing kendaraan dalam sistem koordinat UTM
tTrackLog_utm Menyimpan posisi dari pergerakan masing-masing kendaraan dalam sistem koordinat UTM
Deskripsi rinci dari tabel diatas dapat dilihat pada lampiran A
3.2.3.3 Perancangan Antarmuka Web
Pada bagian ini akan dibahas mengenai tahapan perancangan antarmuka
aplikasi. Aplikasi yang dibangun adalah aplikasi yang berbasis web oleh karena
itu antarmuka yang dibangun adalah antarmuka web. Antarmuka yang akan
dibangun dirancang sesederhana mungkin sehingga memudahkan pengguna
dalam menggunakannya.
Rancangan antarmuka dari aplikasi ini adalah sebagai berikut:
1. Halaman pembuka.
Halaman ini merupakan halaman yang pertama kali tampil pada saat
pengguna membuka aplikasi. Halaman ini hanya berisi logo situs dan link ke
halaman utama. Desain halaman pembuka dapat dilihat pada gambar 3.7
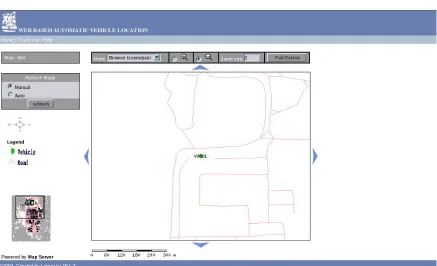
2. Halaman Utama
Halaman ini merupakan halaman utama dimana visualisasi posisi kendaraan
ditampilkan. Antarmuka halaman utama ini terdiri atas beberapa bagian
utama yaitu:
Muka peta, yang merupakan tempat visualisasi posisi kendaraan yang
dilatarbelakangi oleh peta jalan. Untuk menambah kemampuan navigasi,
navigasi pada muka peta ini terdiri dari dua mode yaitu mode browse dan
mode query. Pada mode browse pengguna dapat memperbesar (zoom
in) dan memperkecil (zoom out) peta dengan cara mengklik salah satu
bagian dari muka peta dengan terlebih dahulu memasukkan zoom factor
pada text field yang ada. Selain itu pengguna juga dapat menggeser
tampilan peta ke kiri/kanan atau ke atas/bawah dengan mengklik gambar
anak panah yang ada pada masing-masing sisi muka peta. Pada mode
query, pengguna dapat mengquery informasi salah satu kendaraan
dengan mengklik salah satu simbol kendaraan yang ada pada muka peta
atau mengquery beberapa informasi kendaraan sekaligus dengan cara
menggeser (drag) kursor pada suatu area tertentu pada muka peta
sehingga membentuk area segi empat.
Legenda, yaitu bagian yang menampilkan keterangan dari objek-objek
peta
Peta referensi, yaitu bagian yang menampilkan peta referensi dari peta
pada halaman utama.
Scalebar, yaitu bagian yang menampilkan scalebar dari muka peta.
Refresh mode, pada bagian ini pengguna dapat memilih jenis refresh,
yaitu manual atau automatic. Jika pengguna memilih mode manual,
halaman ini hanya akan direfresh jika pengguna menekan tombol refresh
pada browser, sedangkan pada mode automatic, halaman secara
otomatis direfresh berdasarkan refresh rate / refresh interval yang dipilih
pengguna.
Info peta, merupakan bagian yang berfungsi untuk menampilkan nama
peta jalan yang sedang digunakan.
Desain halaman utama dari aplikasi ini dapat dilihat pada gambar 3.8.
Halaman ini akan tampil jika pengguna memilih menu track log.
Pada halaman ini pengguna dapat menampilkan track log dari suatu
kendaraan dalam dua mode tampilan yaitu mode tabular dan mode
visualisasi peta. Pada mode tabular, track log dari suatu kendaraan
ditampilkan dalam bentuk dalam bentuk record-record dalam tabel,
sedangkan pada mode peta, track log dari suatu kendaraan ditampilkan
dalam bentuk visualisasi peta. Jika pengguna menggunakan mode
visualisasi peta, maka setelah pengguna memilih id kendaraan yang akan
ditampilkan track log nya, halaman akan diredirect ke halaman utama
untuk memvisualisasikan track log dari kendaraan yang dipilih. Desain
halaman track log dapat dilihat pada gambar 3.9.
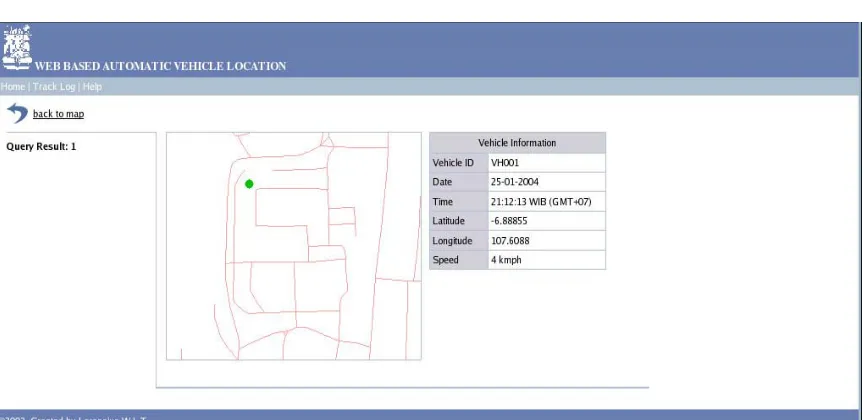
4. Halaman Query
Halaman ini akan muncul jika pengguna mengquery informasi
kendaraan pada muka peta yang ada pada halaman utama. Halaman ini
menampilkan hasil query dalam bentuk data tabular dan visualisasi peta
dari kendaraan yang diquery. Desain halaman query dapat dilihat pada
Gambar 3.7. Desain halaman pembuka
Gambar 3.9. Desain halaman track log
Gambar 3.10. Desain halaman query
3.2.4 PerancanganModul Interface Komunikasi
Pada bagian ini akan dibahas mengenai proses perancangan interface
komunikasi. Interface komunikasi merupakan perangkat lunak yang menangani
proses komunikasi data antara kendaraan dan pusat kontrol. Interface
komunikasi terdiri atas interface komunikasi kendaraan yang menangani proses
komunikasi pada kendaraan dan interface komunikasi pusat kontrol yang
3.2.4.1 Perancangan Interface Komunikasi Kendaraan
Interface komunikasi kendaraan memiliki fungsi-fungsi sebagai berikut:
Menangani proses penyaringan data keluaran GPS untuk memperoleh data
posisi, kecepatan, tanggal, dan waktu.
Mengirim data posisi, kecepatan, tanggal dan waktu hasil penyaringan ke
modem radio untuk dikirimkan ke pusat kontrol.
Interface ini dijalankan pada komputer PC atau laptop yang terhubung
dengan GPS receiver dan modem radio pada port komunikasi serial melalui
kabel RS-232. Alur kerja interface ini dapat dilihat pada gambar 3.11 di bawah
ini:
Gambar 3.11. Alur kerja interface komunikasi kendaraan
GPS receiver terhubung ke komputer PC atau laptop pada port
komunikasi serial melalui kabel RS-232. Program membaca data yang dikirim
oleh receiver GPS di buffer serial port, untuk selanjutnya disaring untuk
mendapatkan string posisi, kecepatan, tanggal dan waktu. Setelah itu string
tersebut digabungkan dengan id kendaraan dalam format seperti yang telah
ditentukan pada sub bab 3.2.2.2. Kemudian data ditulis ke buffer serial port
dimana modem radio terhubung untuk dikirimkan ke modem radio dalam interval
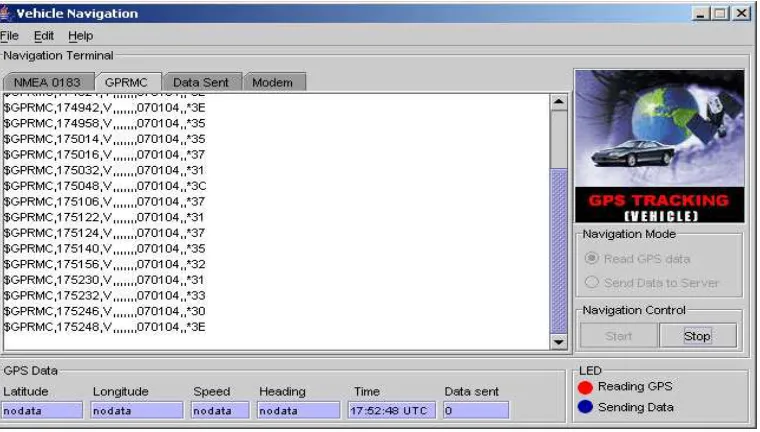
Interface ini dirancang sebagai sebuah aplikasi yang berbasis GUI
(Graphical User Interface) dan hanya dapat dijalankan pada lingkungan desktop
(Graphical Mode).
Desain GUI dari interface ini dapat dilihat pada gambar 3.14. Daftar kelas yang
membangun modul ini dapat dilihat pada lampiran B.
Gambar 3.12. Desain GUI interface komunikasi kendaraan 3.2.4.2 Perancangan Interface Komunikasi Pusat Kontrol
Interface komunikasi pusat kontrol memiliki fungsi-fungsi sebagai berikut:
Membaca data yang diterima dari modem radio
Mengubah format data yang dikirim oleh kendaraan ke dalam format data
basis data PostgreSQL/postGIS
Menyimpan data yang dikirim kendaraan ke dalam basis data
PostgreSQL/PostGIS.
Interface ini dijalankan pada web server yang berjalan pada sistem
operasi Linux yang terhubung dengan modem radio pada port komunikasi serial.
Alur kerja interface ini dapat dilihat pada gambar 3.13. Program membaca data
yang dikirim oleh kendaraan pada buffer serial port yang terhubung dengan
data pengiriman. Setelah diekstrak menjadi bagian-bagiannya (id, posisi,
kecepatan, tanggal dan waktu), masing-masing bagian tersebut dikonversi ke
dalam tipe data yang sesuai dan disimpan di dalam basis data
PostgreSQL/PostGIS untuk kemudian diakses oleh aplikasi web. Jika peta jalan
dalam sistem koordinat UTM maka sebelum disimpan dalam tabel basis data,
maka data posisi (lintang dan bujur) terlebih dahulu ditransformasi ke dalam
sistem koordinat UTM .
Gambar 3.13. Alur kerja modul interface komunikasi pusat kontrol
Interface ini dirancang sebagai sebuah aplikasi yang berbasis GUI (Graphical
User Interface) dan hanya dapat dijalankan pada lingkungan desktop (Graphical
Mode). Desain GUI dari interface ini dapat dilihat pada gambar 3.14. Daftar kelas
BAB IV
IMPLEMENTASI
Pada bagian ini akan dibahas mengenai implementasi sistem
berdasarkan hasil perancangan yang telah ditetapkan pada bab sebelumnya.
Implementasi sistem meliputi lingkungan pengembangan, implementasi aplikasi
web, dan implementasi modul interface komunikasi.
4.1 Lingkungan Implementasi
Aplikasi yang dibangun dikembangkan pada lingkungan perangkat keras
(hardware) dan perangkat lunak (software) sebagai berikut:
4.1.1 Perangkat Keras 1. Komputer
Spesifikasi komputer yang digunakan dalam tugas akhir ini adalah sebagai
berikut:
Processor Intel Pentium III 600 Mhz
Memori primer (RAM) 196 MB
Hardisk 20 GB
VGA Card 8 Mb
Ethernet 10/100 Mbps
2. Modem Radio Telereader TNC-220 Mr Packet dan KPC-2 Packet
Communicator
4. Radio (transceiver) Kenwood TR-9130 dan Icom HT IC-2N
5. GPS Garmin II Plus
4.1.2 Perangkat Lunak
Perangkat-perangkat lunak yang digunakan dalam implementasi aplikasi
Sistem Operasi Linux Red Hat 9.0
Apache Web Server versi 1.3.28
PHP versi 4.3.2
Map Server versi 4.0 beserta modul PHP Mapscript
Postgresql versi 7.3.2 beserta JDBC Drivernya
Postgis versi 0.75
Java SDK 1.4.2
Poseidon for UML Community Edition
Forte for Java Community Edition
4.2 Implementasi Aplikasi Web
Implementasi aplikasi web meliputi implementasi modul aplikasi,
implementasi basis data dan implementasi antarmuka web.
4.2.1 Implementasi Modul Aplikasi
Pada bagian ini, modul-modul yang telah dirancang pada bab
sebelumnya diimplementasikan (coding) dengan menggunakan bahasa script
PHP dan disimpan dalam file dengan ekstensi .php.
Tabel 4.1 Implementasi modul aplikasi web
Nama Modul File Visualisasi Data libMap.php Query Posisi libQuery.php Basis Data sqlObj.php
psqlObj.php
4.2.2 Implementasi Basis Data
Tabel-tabel yang telah didefinisikan pada tahap perancangan disimpan
dalam sebuah basis data dengan nama itbmap pada DBMS
PostgreSQL/PostGIS. Implementasinya dilakukan dengan menggunakan bahasa
SQL dan dapat dilihat pada lampiran C.