Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
209
STUDI PERANCANGAN HULLFORM KAPAL SUPER CONTAINER
MALACCA-MAX 18.000 TEUS
Astra H Napitupulu, Ahmad Fauzan Zakki, Good Rindo
Program Studi S1 Teknik Perkapalan, Fakultas Teknik, Universitas Diponegoro Email : [email protected]
Abstrak
Kapal container adalah kapal yang berfungsi untuk mengangkut peti kemas. Seiring perkembangan teknologi dan ilmu pengetahuan, dalam beberapa dekade terakhir kapal kontainer berkembang dalam ukuran yang besar. Hal ini merupakan jawaban atas kebutuhan akan pengangkutan barang sekaligus untuk menunjang perdagangan dan perekonomian dunia, khususnya untuk daerah kepulauan seperti Indonesia yang selama ini kekurangan sarana pengangkutan barang melalui jalur laut untuk mendistribusikan kebutuhan kebutuhan di daerah lainnya Malacca-Max adalah sebuah gagasan yang dibuat oleh Marco Scholtens tentang kapal pengangkut 18.000 TEU container yang dirancang melalui selat malaka dengan kedalaman sarat maksimal 21 m. Pada tahun 1999, ketika konsep malacca-max dipublikasikan, pandangan publik terhadap konsep 18.000 teus bisa menjadi kenyataan . Dalam melaksanakan penelitian ini dilakukan beberapa tahapan perancangan yaitu , membuat rencana garis, analisa stabilitas, hambatan, dan olah gerak kapal.Secara khusus penelitian ini menghasilkan 2 model rencana garis, dengan ukuran Loa: 400 m, Lpp: 380 m, Lwl: 390 m, B: 60 m, T: 21m, H:35 m, dan Cb: 0.62.Pada tinjauan stabilitas, hasil menunjukkan kapal stabil, karena titik M berada diatas titik G.Pada tinjauan olah gerak kapal , hasil menunjukkan hasil olah gerak seperti Rolling, Pitching dan Heaving yang baik sesuai kriteria Nordfosk.
Kata kunci : Kapal container, Malacca-Max, 18.000 TEU, perancangan, stabilitas, olah gerak kapal.
Container ship is a ship which serves to transport containers. Along with the development of technology and science , in recent decades container ships grew in size large. This is an answer to the need for the transport of goods as well as to support trade and the world economy, particularly for the islands as Indonesia which have shortage of means of transport of goods by sea to redistribute the needs of the needs in other areas. Malacca - Max is an idea created by Marco Scholtens about 18,000 TEU container carrier ship designed through the Malacca Strait with full depth of up to 21 m . In 1999 , when the concept of malacca - max published, the public's view of the concept of 18,000 teus could become a reality.
In carrying out this research, performed some of the design stage , namely , a lines plan , stability analysis , resistance analysis , and motion of the ship analysis. In particular , this research produced two models of the lines plan , with size Loa: 400 m, Lpp: 380 m, Lwl: 390 m, B: 60 m, T: 21m, H:35 m, and Cb: 0.62. In the review of stability , the results showed a steady ship , since the point M is above point G, the results show the result of a motion such as Rolling , Pitching and Heaving a good fit criteria of Nordfosk.
Keywords : container ship , Malacca - Max , 18,000 TEU , ship design , stability , motion of the ship.
I. PENDAHULUAN
1.1.
Latar Belakang
Untuk menunjang kegiatan pengangkutan barang khususnya melalui jalur laut, maka dikembangkan suatu sarana pengangkutan barang yang efektif yaitu menggunakan kapal kontainer.Kapal kontainer adalah kapal yang berfungsi untuk mengangkut peti kemas.
Seiring perkembangan teknologi dan ilmu pengetahuan, dalam beberapa dekade terakhir kapal kontainer berkembang dalam ukuran yang besar.. Hal ini merupakan jawaban atas kebutuhan akan pengangkutan barang sekaligus untuk menunjang perdagangan dan perekonomian dunia, khususnya untuk daerah kepulauan seperti Indonesia yang selama ini
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
210
kekurangan sarana pengangkutan barangmelalui jalur laut untuk mendistribusikan kebutuhan kebutuhan di daerah lainnya.
Mengingat data yang di ungkap dari Direktorat Jendral Perhubungan Laut Kementrian Perhubungan menunjukkan kapal asing masih mendominasi tata niaga kelautan Indonesia.Hingga Oktober 2013, Indonesia hanya memiliki total 10.784 kapal (14,52 juta gross ton / GT). Dan dominasi pelayaran asing yang mengangkut muatan luar negeri (ekspor atau impor) menguasai 90,51 persen (525,5 juta ton).Sementara untuk muatan dalam negeri 50 persen kapal asing menguasai angkutan total barang (89,8 juta ton). Hal ini menunjukkan bahwa potensi dalam dunia maritim Indonesia masih sangat besar dan belum diberdayakan secara optimal.
Dan sebagai negara maritim yang memiliki kekayaan alam yang melimpah, sudah semestinya Indonesia memiliki armada kapal kontainer yang memadai, untuk mengangkut dan menghubungkan daerah-daerah antar pulau sekaligus untuk meningkatkan kelancaran perdagangan dan perekonomian di Indonesia. Namun kenyataanya jumlah kapal kontainer yang berada di Indonesia saat ini masih sedikit , hal ini yang menjadi pertimbangan penulis untuk melakukan perancangan kapal Malacca-Max sebuah gagasan yang di gagas oleh Marco Scholten tentang kapal pengangkut 18.000 TEU container dengan sarat maksimal 21 meter yang dirancang khusus melewati perairan selat malaka, sehingga dinamakan Malacca-Max.
Dalam tugas akhir ini akan dilakukan analisa permodelan meliputi stabilitas, hambatan, dan olah gerak kapal yang terjadi pada kapal super container Malacca-Max. Dengan membuat model kapal analisa stabilitas menggunakan software Maxsurf, analisa hambatan menggunakan software Tydn dan analisa olah gerak menggunakan software ANSYS AQWA.
1.2. Perumusan Masalah
Dengan memperhatikan pokok
permasalahan yang terdapat pada latar belakang maka diambil beberapa rumusan masalah sebagai berikut :
1. Bagaimana desain hullform Malacca-Max super container 18.000 TEU?
2. Bagaimana analisa stabilitas, hambatan, dan olah gerak model 1 dan 2 Malacca-Max?
1.3. Batasan Masalah
Batasan masalah digunakan sebagai arahan serta acuan dalam penulisan tugas akhir sesuai dengan permasalahan serta tujuan yang diharapkan
1. Perancangan meliputi
a.Rencana garis (Lines plan). b.Stabilitas.
c.Hambatan. d.Olah gerak kapal. 2. Menggunakan 2 variasi model.
3. Pembahasan hanya untuk perancangan kapal menggunakan pendekatan software Delftship, Maxsurf dan software lain yang mendukung.
4. Tidak menghitung konstruksi profil, layout kamar mesin serta perlengkapan yang dibawa.
5. Hasil akhir dari tugas akhir ini adalah berupa desain kapal dalam bentuk tiga dimensi dari software, serta data analisa dan tidak membuat rute project kapal tersebut
.
1.4. Tujuan Penelitian
Berdasarkan latar belakang di atas maka maksud dan tujuan dari penelitian ini adalah : 1. Mendapatkan 2 desain hull form kapal
super container Malacca-Max.
2. Mengetahui karakteristik kapal dilihat dari ukuran utama, analisa stabilitas, hambatan, dan olah geraknya
.
3. Perancangan dapat menampung 18.000 TEU.
II. TINJAUAN PUSTAKA 2.1. Container
Container atau peti kemas pada dasarnya dapat didefinisikan menurut kata peti dan kemas. Peti adalah suatu kotak berbentuk geometrik yang terbuat dari bahan-bahan alam (kayu, besi, baja, dll). Kemas merupakan hal-hal yang berkaitan dengan pengepakan atau kemasan. Jadi peti kemas adalah suatu kotak besar berbentuk empat persegi panjang, terbuat dari campuran baja dan tembaga atau bahan lainnya (aluminium, kayu/fiber glass) yang tahan terhadap cuaca. Digunakan untuk tempat pengangkutan dan penyimpanan sejumlah barang yang dapat melindungi serta mengurangi terjadinya kehilangan dan kerusakan barang serta dapat dipisahkan dari
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
211
sarana pengangkutan dengan mudah tanpaharus mengeluarkan isinya. [3]
Table 1 Dimensi peti kemas [4]
2.2. Container Ship
Container Ship adalah kapal yang berfungsi mengangkut barang yang sudah diatur di dalam peti-peti. Muatan peti kemas disamping di dalam palkah juga diletakkan di atas dek dengan pengikatan yang kuat, sehingga peti kemas tersebut tidak bergeser dari tempatnya semula pada saat berlayar. Dengan adanya muatan di atas geladak maka harus diperhatikan mengenai stabilitas kapal. Yang
perlu diperhatikan ialah periode keolengan jangan sampai terlalu lincah, sebab membahayakan container yang ada di atas dek, lebih –lebih apabila sistem pengikatannya kurang sempurna. Konstruksi peti kemas dibuat sedemikian rupa sehingga barang-barang yang ada didalamnya terjamin keamanan dari kerusakkan dan lain-lain. Kapal pengangkut peti kemas harus mempunyai fasilitas pelabuhan khusus container.
2.3. Super Container Malacca-Max
Kapal container malacca-max yang dibandingkan pada tahun 1999 dengan tiga ukuran kapal container lainnya yakni kapal panamax 4.500 teus, kapal ukuran 8.000 teus, dan kapal suez-max 12.000 teus, menunjukkan bahwa kapal malacca-max menawarkan skala ekonomi sekitar 30 % diatas kapal panamax dan 16 % dengan kapal ukuran 8.000 teus. Penenilitian ini dimulai dengan menelaah perkembangan kapal container dan pelayaran. Faktor lain yang mempengaruhi yakni parameter desain kapal, seperti tuntutan oprasional pemilik, dan karakteristik jalur pelayaran. [5]
Gambar.1 Malacca-Max Triple E-Class
Bentuk lambung kapal malacca-max mempunyai koefisien block (cb) = 0,62. Kapal ini memiliki 26 block dari 40 ft container. Didalam ruang muat terdiri dari 20 container yang dimuat sejajar dan 24 baris container yang berada diatas deck. Sehingga total terdapat kapasitas penyimpanan 18.154 teus dengan 8 tingkatan deck container.
Kapal malacca-max sendiri yang sudah ada yakni kapal super container Maersk Triple E Class buatan Daewoo Ship Building Korea, yang mempunyai ukuran panjang 400 m, lebar 59 m, dan tinggi sarat 14,5 m.
2.4. Geometri Kapal
Penggambaran lambung kapal pada sebidang kertas gambar dinamakan rencana garis (lines plan), bentuk lambung kapal secara umum harus mengikuti kebutuhan daya apung, stabilitas, kecepatan, kekuatan mesin, olah gerak dan yang penting adalah kapal bisa dibangun.Gambar Rencana garis (lines plan) terdiri dari proyeksi ortographis / siku-siku dari interseksi / perpotongan antara permukaan / surface lambung kapal dan tiga set bidang yang saling tegak lurus
.
Gambar.2 Lines Plan Malacca-Max
2.5. Stabilitas
Stabilitas adalah kemampuan kapal untuk kembali ke posisi semula setelah mengalami kemiringan akibat gaya yang berasal dari dalam maupun luar kapal. Prinsip dasar stabilitas dan olah gerak kapal perang Menurut Taylor (1977) stabilitas dibedakan menjadi 3 jenis, yaitu: 1) Keseimbangan stabil (Stable equilibrium), 2) Keseimbangan netral (Neutral equilibrium) dan 3) Keseimbangan tidak stabil (Unstable equilibrium).
Untuk pehitungan olah gerak kapal harus dievaluasi dengan menyesuaikan standar kriteria olah gerak yang ada tergantung dari jenis kapal tersebut. Pada penelitian ini, standard olah gerak yang digunakan adalah
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
212
standar kriteria umum untuk kapal kontainermenurut IMO.
2.6. Hambatan
Dalam merencanakan kapal, faktor umum yang memegang peranan penting adalah hambatan yang akan dialami oleh kapal pada waktu bergerak. Suatu bentuk kapal dengan hambatan kecil atau sekecil mungkin adalah menjadi tujuan utama perencanaan kapal.Pada penelitian kali ini dilakukan dengan menggunakan bantuan software hullspeed, dan dikomparasi dengan data hasil pengujian towing tank menggunakan model yang sudag di skala.
2.7. Gelombang Reguler
Respon gerakan kapal terhadap gelombang regular dinyatakan dalam RAO (Response Amplitudo Operator), dimana RAO adalah rasio antara amplitudo gerakan kapal (baik translasi maupun rotasi) terhadap amplitudo gelombang pada frequensi tertentu. Metode untuk menghitung nilai RAO pada penelitian ini menggunakan Strip Theory.
Respons gerakan RAO untuk gerakan translasi merupakan perbandingan langsung antara amplitudo gerakan kapal (Z0) dengan amplitudo gelombang (ζ0) (keduanya dalam satuan panjang) :
RAO = (m/m) [1]
2.8. Spektrum Gelombang
Adapun spektrum gelombang yang digunakan dalam penelitian ini adalah Bretschneider or ITTC dengan menggunakan dua parameter, yaitu tingi gelombang signifikan (Hs) dan periode rata-rata (Tav) . (Iqbal dan Good, 2015).
SITTC ξ (𝜔) = exp ( ) [2] dimana :
𝜔 = Frekuensi gelombang (rad/s) A = 172,75
B =
Spektrum gelombang (Sw) yang dihasilkan dari persamaan (4) sangat bergantung pada nila frekuensi gelombang. Akibat pengaruh kecepatan kapal dan sudut datang gelombang, maka frekuensi gelombang insiden (𝜔w) akan berubah menjadi frekuensi gelombang papasan atau ecountering wave frequency (𝜔e). Gelombang papasan inilah yang digunakan untuk membuat spectrum gelombang papasan (Se). Untuk dapat menghitung frekuensi gelombang papasan dapat menggunakan :
𝜔e = ( 1 - cos μ ) [3]
2.9. Spektrum Respon
Untuk mendapatkan respon gerakan kapal
terhadap gelombang acak dapat digambarkan dengan spektrum respon.Spektrum respon didapatkan dengan mengalikan spektrum gelombang (Sζ) dengan RAO2 .
Sζr (ω) = RAO2 x Sζ (ω) [4]
2.10. Kriteria Seakeeping
Hasil perhitungan seakeeping harus dievaluasi dengan menyesuaikan standar kriteria seakeeping yang ada tergantung jenis kapal tersebut. Pada penelitian ini, standar seakeeping yang digunakan adalah standar kriteria umum untuk kapal niaga yang terdapat pada tabel.
Tabel.1 Kriteria Sea Keeping Merchant Ship
No Standar Kriteria 1 2 3 RMS of Roll RMS of vertical acceleration RMS of lateral acceleration 6,0 deg 0,15 g 0,12 g
III. METODOLOGI PENELITIAN
Metodologi yang dipakai untuk penyelesaian tugas akhir ini secara lengkap dapat dilihat pada gambar dibawah dengan tahapan-tahapan seperti berikut :
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
213
Gambar.3 Flow Chart metodologi penelitianIV. PENGHITUNGAN DAN ANALISA DATA
4.1. Pengolahan Data
4.1.1. Pemodelan Menggunakan Delfship
Dari data yang didapat di buat pemodelan hullform dengan menggunakan bantuan software Delftship versi 3.1. Berikut ini adalah hasil visualisasi desain pada software Delftship.
Gambar.4 Permodelan Kapal Menggunakan Software Delftship.
4.1.2. Analisa Stabilitas
Stabilitas kapal dianalisa menggunakan software Hydromax dengan jenis analisa large angle stability. Sebelum analisa stabilitas dihitung, komponen light weight tonnage (LWT) dan komponen dead weight tonnage (DWT) harus diketahui. Posisi titik berat dari komponen tersebut harus dapat diperhitungnkan hingga mendekati keadaan yang terdapat di dilapangan.
Standar analisa stabilitas menggunakan ketentuan yang terdapat pada International Maritime Organisation (IMO). Standart stabilitas yang ditetapkan IMO adalah mengenai lengan stabilitas (GZ).
Tabel.2 Hasil Analisa standar IMO
Gambar 22 GZ model 1
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
214
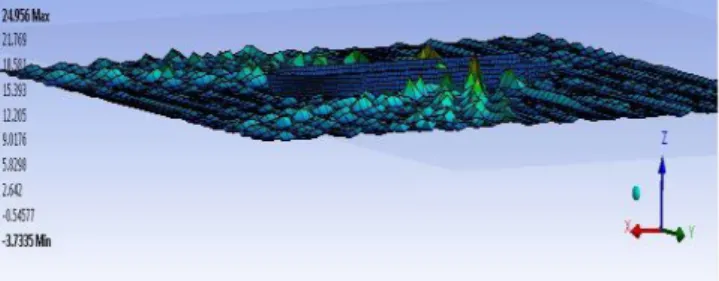
4.1.3. Simulasi Ansys AQWA
Pengujian ini menggunakan perhitungan software Ansys AQWA. Secara garis besar langkah – langkah simulasi olah gerak pada solver ini dibagi menjadi beberapa tahapan antara lain:
a. Geometry b. Mesh c. Solution
4.1.4. Tahap Geometry
Geometry merupakan langkah awal dimana pengecekan solid tidaknya model. Pada tahap ini juga dilakukan pembuatan domain fluida tempat pengujian. Pada tahap ini perintah yang digunakan adalah file > import external geometry file > enter file model > OK > generate.Pada Gambar 6 Model akan solid apabila muncul tanda balok.
Gambar.6 Model solid
4.1.5. Tahap Mesh
Setelah
domain fluida terbentuk langkah selanjutnya adalah melakukan meshing pada model. Untuk itu lebih dahulu menentukan ukuran element yang akan kita gunakan. Namun perlu diingat bahwa semakin kecil elemen yang dibuat, maka jumlah element yang terbentuk semakin banyak sehingga waktu running akan semakin lama dan menghasilkan kapasitas file yang besar.Gambar 7 Hasil mesh
4.1.6. Tahap Set Up
Setup adalah tahapan yang dilakukan setelah mesh berhasil dilakukan. Setup merupakan tahapan yang berisi tentang penentuan hal – hal yang berkaitan dengan simulasi. Gambar 8 Pada tahap ini dibagi menjadi beberapa langkah, antara lain default radius girasih (gyradius), mass point, frequency ratio, wave heading, speed dan lain-lain
.
4.1.7. Tahap Solution
Setelah setup selesai di program, tahap selanjutnya adalah solution. Dalam tahap ini proses perhitungan (running) dilakukan berupa literasi dan perhitungan analisis pada Ansys AQWA.
4.2 Analisa Respon Gerak Pada Gelombang Reguler
Analisa respon gerak kapal pada gelombang reguler dilakukan menggunakan software ANSYS AQWA meliputi 3 jenis gerakan yaitu, roll, pitch dan heave dengan kecepatan masing-masing untuk tiap model sebesar 25 knot, sudut heading 1800 dan 900.
Gambar.8Proses analisa motion kapal pada software ANSYS AQWA.
Gambar di atas merupakan tampilan model kapal saat dianalisa pada software ANSYS AQWA.Berikut adalah grafik dari masing-masing gerakan roll, pitch dan heave.
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
215
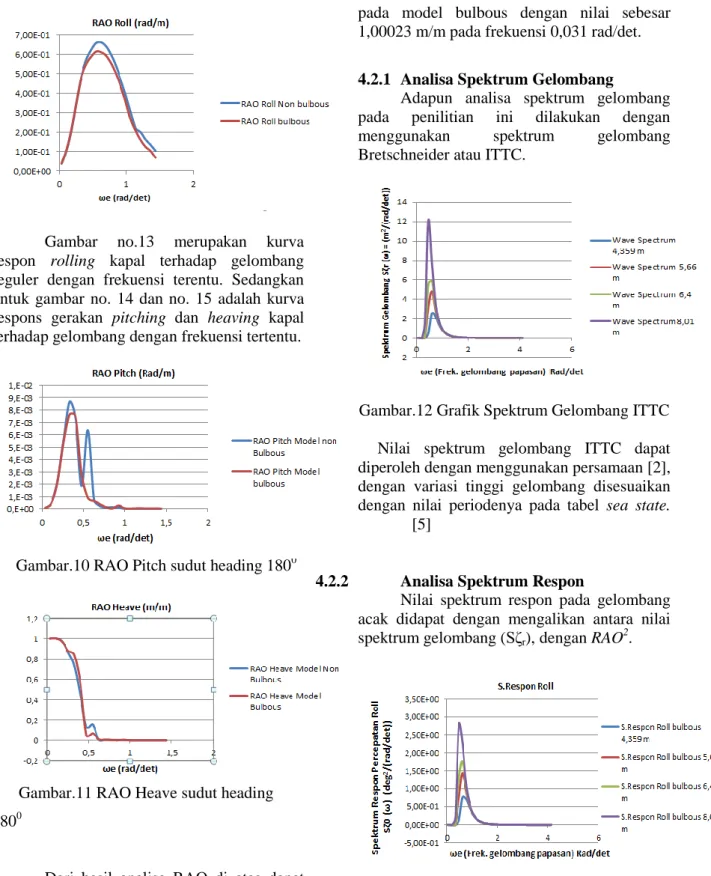
Gambar.9 RAO Roll sudut heading 1800Gambar no.13 merupakan kurva respon rolling kapal terhadap gelombang reguler dengan frekuensi terentu. Sedangkan untuk gambar no. 14 dan no. 15 adalah kurva respons gerakan pitching dan heaving kapal terhadap gelombang dengan frekuensi tertentu.
Gambar.10 RAO Pitch sudut heading 1800
Gambar.11 RAO Heave sudut heading 1800
Dari hasil analisa RAO di atas dapat diketahui bahwa gerakan rolling terbesar terjadi pada model basic dengan nilai sebesar 0,6609 rad/m pada frekuensi 0,621 rad/det, sedangakan untuk gerakan pitching terbesar terjadi pada model basic dengan nilai sebesar 0,0086 rad/m pada frekuensi 0,326 rad/det. Dan untuk gerakan heaving terbesar terjadi
pada model bulbous dengan nilai sebesar 1,00023 m/m pada frekuensi 0,031 rad/det.
4.2.1 Analisa Spektrum Gelombang
Adapun analisa spektrum gelombang pada penilitian ini dilakukan dengan
menggunakan spektrum gelombang
Bretschneider atau ITTC.
Gambar.12 Grafik Spektrum Gelombang ITTC Nilai spektrum gelombang ITTC dapat diperoleh dengan menggunakan persamaan [2], dengan variasi tinggi gelombang disesuaikan dengan nilai periodenya pada tabel sea state.
[5]
4.2.2 Analisa Spektrum Respon
Nilai spektrum respon pada gelombang acak didapat dengan mengalikan antara nilai spektrum gelombang (Sζr), dengan RAO
2 .
Gambar.13 Grafik Spektrum Respon Roll Gambar di atas merupakan gambar dari grafik spektrum respon roll model kapal tipe bulbous dengan amplitudo terbesar 4,1578 pada frekuensi 0,4774 rad/det.
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
216
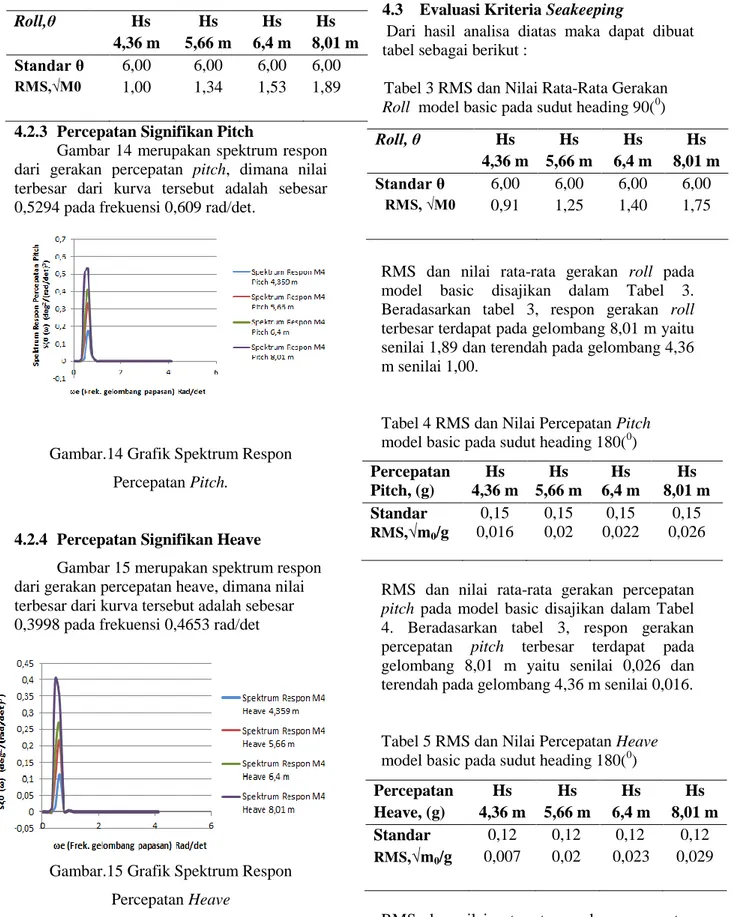
4.2.3 Percepatan Signifikan Pitch
Gambar 14 merupakan spektrum respon dari gerakan percepatan pitch, dimana nilai terbesar dari kurva tersebut adalah sebesar 0,5294 pada frekuensi 0,609 rad/det.
Gambar.14 Grafik Spektrum Respon Percepatan Pitch.
4.2.4 Percepatan Signifikan Heave
Gambar 15 merupakan spektrum respon dari gerakan percepatan heave, dimana nilai terbesar dari kurva tersebut adalah sebesar 0,3998 pada frekuensi 0,4653 rad/det
Gambar.15 Grafik Spektrum Respon Percepatan Heave
4.3 Evaluasi Kriteria Seakeeping
Dari hasil analisa diatas maka dapat dibuat tabel sebagai berikut :
Tabel 3 RMS dan Nilai Rata-Rata Gerakan Roll model basic pada sudut heading 90(0)
RMS dan nilai rata-rata gerakan roll pada model basic disajikan dalam Tabel 3. Beradasarkan tabel 3, respon gerakan roll terbesar terdapat pada gelombang 8,01 m yaitu senilai 1,89 dan terendah pada gelombang 4,36 m senilai 1,00.
Tabel 4 RMS dan Nilai Percepatan Pitch model basic pada sudut heading 180(0)
RMS dan nilai rata-rata gerakan percepatan pitch pada model basic disajikan dalam Tabel 4. Beradasarkan tabel 3, respon gerakan percepatan pitch terbesar terdapat pada gelombang 8,01 m yaitu senilai 0,026 dan terendah pada gelombang 4,36 m senilai 0,016.
Tabel 5 RMS dan Nilai Percepatan Heave model basic pada sudut heading 180(0)
RMS dan nilai rata-rata gerakan percepatan heave pada model basic disajikan dalam Tabel 5. Beradasarkan tabel 3, respon gerakan percepatan heave terbesar terdapat pada gelombang 8,01 m yaitu senilai 0,029 dan terendah pada gelombang 4,36 m senilai 0,007.
Roll,θ Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar θ RMS,√M0 6,00 1,00 6,00 1,34 6,00 1,53 6,00 1,89 Roll, θ Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar θ RMS, √M0 6,00 0,91 6,00 1,25 6,00 1,40 6,00 1,75 Percepatan Pitch, (g) Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar RMS,√m0/g 0,15 0,016 0,15 0,02 0,15 0,022 0,15 0,026 Percepatan Heave, (g) Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar RMS,√m0/g 0,12 0,007 0,12 0,02 0,12 0,023 0,12 0,029
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
217
Tabel 6 RMS dan Nilai Rata-Rata GerakanRoll model bulbous pada sudut heading 90(0) RMS dan nilai rata-rata gerakan roll pada model bulbous disajikan dalam Tabel 6. Beradasarkan tabel 6, respon gerakan roll terbesar terdapat pada gelombang 8,01 m yaitu senilai 1,75 dan terendah pada gelombang 4,36 m senilai 0,91.
Tabel 7 RMS dan Nilai Percepatan Pitch model bulbous pada sudut heading 180(0) RMS dan nilai rata-rata gerakan percepatan pitch pada model bulbous disajikan dalam Tabel 7. Beradasarkan tabel 7, respon gerakan percepatan pitch terbesar terdapat pada gelombang 8,01 m yaitu senilai 0,005 dan terendah pada gelombang 4,36 m senilai 0,002. Tabel 8 RMS dan Nilai Percepatan Heave model basic pada sudut heading 180(0)
Percepatan Heave, (g) Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar RMS,√m0/g 0,12 0,014 0,12 0,022 0,12 0,026 0,12 0,035
RMS dan nilai rata-rata gerakan percepatan heave pada model basic disajikan dalam Tabel 8. Beradasarkan tabel 3, respon gerakan percepatan heave terbesar terdapat pada gelombang 8,01 m yaitu senilai 0,035 dan terendah pada gelombang 4,36 m senilai 0,014.
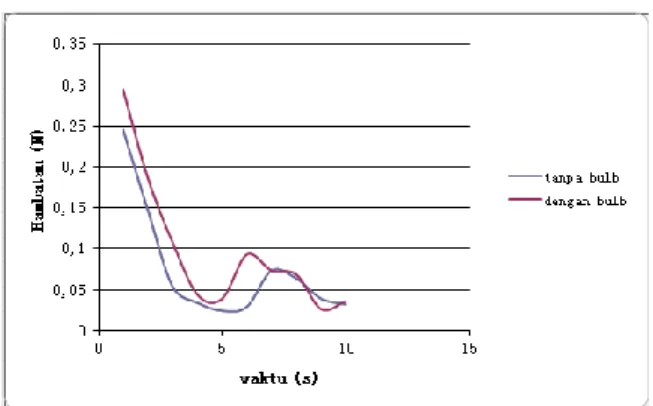
4.4 Analisa Hambatan dengan uji Towing
Tank.
Pada pengujian towing tank menggunakan model basic dan bulbous, dengan masing masing skala 1:660.
Gambar.16 Proses pengambilan data saat pengujian towing tank.
Dengan hasil pengujian dari kedua model yaitu :
Gambar 17. Grafik diatas merupakan tahan kapal berdasarkan waktu.
Dengan hambatan total untuk model basic senilai 0,24 Nsedangkan untuk model bulbous senilai 0,1962 N.
V. KESIMPULAN
Berdasarkan percobaan dan simulasi yang telah dilakukan maka dapat disimpulkan sebagai berikut :
1. Hasil perhitungan hidrostatik kapal supercontainer Malacca-Max menunjukkan bahwa kapal mempunyai displacement = 311105 ton, Cb = 0,62, LCB = 190,11.
2. Nilai periode oleng sebesar 23,97 detik dan nilai GZ maksimal sebesar 1,93 meter untuk model bulbous, dan 21,92 detik dan nilai GZ maksimal sebesar 2,23 meter untuk model basic.
3. Hasil analisa seakeeping menunjukkan bahwa kapal mempunyai kemampuan seakeeping yang baik karena memenuhi kriteria Nordfosk.
Percepatan Pitch, (g) Hs 4,36 m Hs 5,66 m Hs 6,4 m Hs 8,01 m Standar RMS,√m0/g 0,15 0,002 0,15 0,003 0,15 0,004 0,15 0,005
Jurnal Teknik Perkapalan - Vol. 4, No.1 Januari 2016
218
Daftar Pustaka
[1]
Wijnolst, Niko, Wergeland,Tor, 2009,Shipping Innovation, Amsterdam, Netherland.
[2]
Santoso, IGM, Sudjono, YJ, 1983, TeoriBangunan Kapal , Direktorat Pendidikan
Menengah Kejuruan, Departemen Pendidikan dan Kebudayaan, Indonesia.
[3]
Molland, Antony E, 2010, The MaritimeEngineering Reference Book, Oxford University, Oxford:UK
[4]
Watson, D., 1998, Practical Ship Design, Vol.1,Elsevier Science Ltd.,Kidlington, Oxfoed, UK.[5]
Santosa, I Gusti Made, 1999, Diktat KuliahPerencanaan Kapal, ITS Surabaya
[6]
Siswanto, Digul, 1998, Teori Tahanan Kapal, Fakultas Teknologi Kelautan, Institut Teknologi 10 November, Indonesia[7]
Rizal,Rizal, 2014, Perancangan Kapal Kontainer 9000 DWT Rute Surabaya Banjarmasin, Tugas Akhir, Jurusan TeknikPerkapalan, UNDIP: Semarang.
[8]
Scholtens, Marco., Waals, Frans., Wijnolst, Niko., 1999, MALACCA-MAX The UltimateContainer Carrier,UniversityPress,Delft.
[9]
Bhattacharya, R ,1972, Dynamics of MarineVehicles, John wileys & Sons, New York.
![Table 1 Dimensi peti kemas [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4449293.3230392/3.892.106.408.188.379/table-dimensi-peti-kemas.webp)