B1-65
PENANGKAPAN GERAK MANUSIA 3D
BERDASAR PADA PENANDA AKTIF DENGAN KAMERA MURAH
Eka Prasetyono1), Eko Mulyanto Yuniarno2), Mochamad Hariadi2), Mauridhi Hery Purnomo2)
1
Teknik Elektro, Fakultas Teknik Industri, Institut Teknologi Sepuluh Nopember
2
Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya Telp : (031) 5922936, Fax : (031) 5922936
E-mail : [email protected], [email protected], [email protected], [email protected] Abstrak Sistem penangkapana gerak manusia merupakan bagiam dari pemanfaatan teknologi visi komputer banyak berkembang dibidang animasi dan game. Melalui sistem penangkapan gerak pembuatan animasi dapat dilakukan dalam waktu yang singkat dan tidak memerlukan banyak orang. Namun ketersediaan alat dan pemanfaatan teknologi sistem penangkapan gerak di dunia animasi Indonesia masih sangat minim dikarenakan mahal harganya. Penelitian ini mengusulkan sistem penangkapan gerak manusia yang murah dari sisi harga namun dengan kualitas yang baik, dimana sistem dibangun berdasar sistem penangkapan gerak manusia dengan penanda aktif, menggunakan empat kamera web, metode rekonstruksi 3D menggunakan multiview geometri. Hasil rekontruski yang diperoleh dengan berbagai persaman garis telah didapatkan titik pada koordinat dunia yang cukup baik.
Kata kunci : sistem penangkapan gerak manusia, penanda aktif, multi kamera.
1. PENDAHULUAN
Teknologi penangkapan gerak manusia telah banyak berkembang di berbagai bidang, mulai dari bidang olahraga untuk proses analisa performance atlet, pada bidang medis untuk melakukan diagnosa dan analisa terhadap efek pemberian latihan atau pemberian obat [2], pada bidang game dan animasi untuk membuat pergerakan karakter yang realistis. Namun ketersediaan alat dan implementasi teknologi penangkapan gerak khususnya di dunia industri kreatif game dan animasi masih sangat minim dikarenakan mahalnya alat dan perangkat lunak yang dipakai [3].
Untuk menyikapi masalah mahlanya harga pada implementasi penangkapan gerak manusia di bidang industri kreatif game dan animasi maka, penelitian ini mengusulkan penangkapan gerak manusia yang handal dan murah dari segi harga, yaitu melalui penangkapan gerak manusia berdasar penanda aktif dengan multi kamera. Penjejakan berbasis penanda ini banyak dipakai oleh sektor industri dikarenakan ketepatannya dalam penentuan sendi, sehingga dapat dikumpulkan dengan mudah sebagai informasi titik sendi pergerakan di ruang 3D [8]. Untuk memperingan proses komputasi maka, penanda dipilih penanda aktif yang memancarkan cahaya dan ruang penangkapanan gerak manusia yang minim cahaya. Pemilihahan jenis penanda dan jenis ruangan tersebut bertujuan mempermudah dan memperingan proses pendeteksian penada cukup dengan proses thresholding tanpa back gruond subtraction. Hasil yang diharapkan dari penelitian ini adalah diperolehnya penangkapan gerak manusia yang handal dalam memperoleh titik-titik rekonstruksi dan murah dari segi harga.
2. KAJIAN PUSTAKA DAN DASAR TEORI 2.1 Penangkapan Gerak Manusia
Penangkapanan gerak manusia adalah teknik yang digunakan untuk merekam data digital yang didapat dari pergerakan manusia secara langsung. Penangkapanan gerak manusia digunakan untuk menangkap gerakan dari seorang artis, kemudian hasilnya digunakan untuk menggerakkan model agar pergerakan model tersebut terlihat alami dan dapat dinikmati oleh orang yang melihatnya.
Ada 3 buah representasi model yang sering digunakan dalam sistem penangkapanan gerak manusia yaitu figur tongkat, kontur 2D, dan model volumetrik 3D [1]. Representasi manusia dengan model persendian atau model figur tongkat seperti pada gambar 1 adalah teknik permodelan yang sering dipakai karena mewakili fitur anatomi manusia [5]. Fitur ini dipakai dengan beragam asumsi yang diterapkan demi kemudahan dan kehandalan sistem yang dibangun. Luo dan teman-teman meneliti menggunakan model antara siluet dan figur tongkat [4].
Gambar 1. Model figur tongkat.
Representasi manusia dengan model persendian atau model figur tongkat diperoleh dari rekonstruksi titik-titik penanda dari citra tiga dimensi. Citra 3D diperoleh dari proses tranformasi koordinat citra 2D. Untuk dapat melakukan transformasi dari citra 2D ke citra 3D diperlukan beberapa parameter yang diperoleh dari kalibrasi kamera. Dalam proses kalibrasi kamera memerlukan suatu model kamera sehingga akan didapatkan parameter internal dan
eksternal dari kamera yang di gunakan untuk parameter pada proses transformasi citra 2D ke citra 3D.
2.2 Model Kamera
Model kamera yang dipilih dalam penelitian ini adalah model kamera lubang jarum, model ini dipilih karena sudah umum digunakan pada penelitian-penelitian sebelumnya dan berhasil dengan baik [7]. Apabila diasumsikan sebuah kamera dengan pusat titik kamera berhimpit dengan pusat sumbu koordinat dunia, maka dapat di gambarkan seperti nampak pada gambar 2.
Gambar 2. Model kamera lubang jarum Apabila suatu kamera dengan pusat titik kamera tidak berhimpit dengan pusat sumbu koordinat dunia seperti digambarkan pada gambar 3. Untuk memperoleh informasi titik-titik pada gambar dalam koordinat dunia maka diperlukan suatu matrik transformasi dari koordiant 2D gambar ke koordinat 3D dunia. ) , , (xSySzS ) , , (XSYSZS ) , , (xiyi f y x Z z O Y X M
Gambar 3. Model kamera lubang jarum dengan pusat titik kamera tidak berhimpit dengan pusat
sumbu koordinat dunia
……(1)
Untuk dapat melakukan suatu rekonstruksi 3D diperlukan parameter-parameter intrinsik dan ekstrinsik dari kamera. Ada beberapa methode yang digunakan untuk melakukan kalibrasi kamera salah satu diantaranya metode Tsai Grid. Dari hasil kalibrasi kamera parameter intrinsik dan ekstrinsik akan diperoleh sebuah matrik yang dapat digunakan untuk melakukan tranformasi dari koordinat kamera
ke koordinat dunia, Persamaan 1 merupakan persamaan matrik dari koordinat gambar ke koordinat dunia sebuah kamera.
2.3 Multi View Geometry
Perbedaan sudut pandang dalam mengambil gambar bukanlah sesuatu yang tidak memiliki hubungan. Ada beberpapa hubungan diantara dua gambar, tiga gambar atau lebih. Hubungan antar gambar ini mengandung banyak makna dan dapat digunakan umtuk mendapatkan suatu informasi dari suatu gambar [7].
Gambar 4. Ilustrasi Two View Geometry Pada penentuan suatu titik berdasarkan methode multi view geometry dikategorikan dalam beberap jenis geometry yaitu two view geometry , three view geometry dan multi view geometry. Gambar 4 merupakan ilustrasi dari two view geometry , gambar 5 three view geometry. Metode multi view geometry ini banyak di gunakan dalam rekonstruksi 3D dari citra yang diambil dari berbagai sudut pandang [7].
Gambar 5. Ilustrasi Three View Geometry Untuk melakukan rekonstruksi titik-titik penanda dari citra yang diambil dari berbagai sudut pandang dengan metode multi view geometry secara sederhananya melaui perpotongan persamaan garis atau perpotongan persamaan bidang.
Gambar 6. Ilustrasi penentuan titik potong persamaan garis dalam proses rekonstruksi
Perhatikan gambar di atas, titik A1 dan B1 merupakan titik pusat kamera 1 dan kamera 2 pada koordinat 3D dunia, f1 dan f2 merupakan jarak bidang gambar ke titik pusat kamera yang nilainya diperoleh dari focal length masing-masing kamera. Titik A2 dan B2 merupakan citra titik penanda, dari titik A1 dan A2 dapat di buat menjadi persamaan garis m begitu pula dengan titik B1 dan B2 buat menjadi persamaan garis l. Secara umum untuk mendapatkan persamaan garis dapat menggunakan beberapa persamaan seperti pada persamaan 2 berikut ini.
…………. (2)
………… (3)
Titik C adalah perpotongan antara dua persamaan garis l dan m, titik C dapat dicari melaui eliminasi, subsitusi atau cara yang lain. Apabila garis l dan m tidak berpotongan dan tidak sejajar maka titik perpotongan dapat dicari melalui pendekatan. Titik pendekatan diperoleh dengan cara melakukan Cross product antara vektor garis l dan vektor garis m (persamaan). hasil cross product ini akan membentuk yang arahnya tegak lulus terhadap vektor garis l dan vektor garis m. ………..(4)
………...………(5)
………..………(6)
………(7)
Dari hasil cross product tersebut didapat sistem koordinat 3D yang baru, proses selanjutnya mentransformasi titik-titik A1,A2,B1,B2 kedalam sistem koordinat yang baru, setelah didapatkan titik A1’,A2’,B1’,B2’ maka titik koordinat z dari titik A1’,A2’,B1’,B2’ akan sama, sehingga dilihat dari arah sumbu z dapat dihitung titik perpotongan garis l’ dan m’ pada titik tertentu. Setelah didapatkan titik perpotongan garis l’ dan m’ titik tersebut di rata-rata dan hasilnya di tranformasikan kembali ke sistem koordinat asal koordinat 3D dunia.
3. METODE PENELITIAN
3.1 Perancangan Ruang Penangkapan Gerak Perancangan ruang penangkapan gerak manusia dalam penelitian ini menggunakan sebuah ruangan yang tertutup untuk menjaga intensitas cahaya yang masuk tidak berubah. Ruang penangkapan gerak ini menggunakan 4 buah kamera webcam dengan posisi peletakan kamera seperi pada gambar 7 berikut ini.
Gambar 7. Letak Kamera Pada Ruang Penangkapan Gerak
Pemilihan warna latar belakang dari ruangan adalah warna biru dengan menggunakan kain warna biru. Kain warna biru ini digunakan untuk menutupi
seluruh ruangan baik dari sisi samping, sisi atas dan sisi bawah. Ukuran ruang penangkapan gerak manusia dan spesifikasi kamera yang digunakan dalam penelitian ini dapat dilihat pada tabel 1. Tabel 1. Kemampuan kamera dan desain ruangan.
No. Nama Keterangan
1 Ukuran ruang 3m x 2,8m x 2,5m
2 Kamera Webcam Logitech QuickCam Pro
3 Resolusi (piksel) HD ( 960 x 720 )
4 Frame Rate 15 fps
2.3 Perancangan Kostum dan Penanda
Kostum berupa baju yang ukuranya agak ketat, warna biru dengan beberpa titik penanda aktif. Pemilihan penada aktif ini dimaksudkan untuk memperingan proses komputasi dalam memperoleh titik-titik penanda dari semua kamera. Jumlah penada yang diperlukan untuk penelitian ini mengacu pada [5]. Gambar 8 merupakan rancangan kostum beserta penada yang telah di pakai.
Gambar 8. (a) Kostum dan penanda, (b) Model Figur Tongkat
2.4 Perancangan Rekonstruksi 3D
Secara sederhana tahap-tahap yang harus ditempuh dalam penelitian ini untuk mencapai rekonstruksi 3D dapat digambarkan dalam diagram alir seperti pada Gambar 9 berikut ini.
4. HASIL
Hasil citra asli yang diperoleh dari empat kamera pada frame yang sama di tunjukkan pada gambar 10, mulai dari kamera satu sampai kamera 4. Pada gambar 11 sampai gambar 14 merupakan cita yang telah diolah sehingga masing masing citra dengan tiap titik penandanya memiliki informasi titik koordinat 3D.
Gambar 10. Gambar dari 4 kamera pada frame yang sama.
Gambar 11. Citra dari kamera 1 dengan informasi titik koordinat 3D
Gambar 12. Citra dari kamera 2 dengan informasi titik koordinat 3D
Gambar 13. Citra dari kamera 3 dengan informasi titik koordinat 3D
Gambar 14. Citra dari kamera 4 dengan informasi titik koordinat 3D
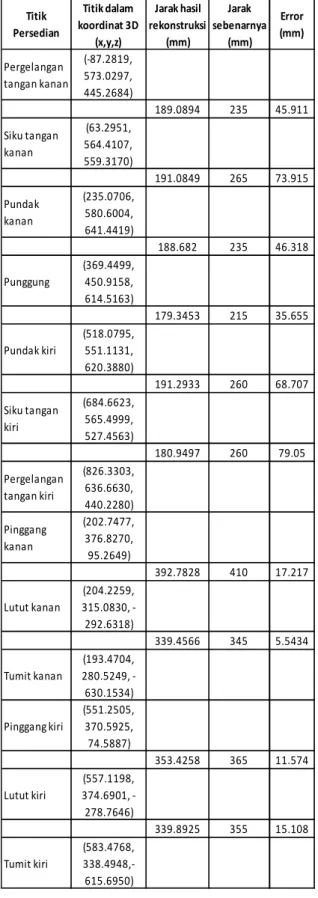
Tabel 2. Data hasil rekontruksi dengan metode perpotongan persamaan garis bidang
Titik Persedian Titik dalam koordinat 3D (x,y,z) Jarak hasil rekonstruksi (mm) Jarak sebenarnya (mm) Error (mm) Pergelangan tangan kanan (-87.2819, 573.0297, 445.2684) 189.0894 235 45.911 Siku tangan kanan (63.2951, 564.4107, 559.3170) 191.0849 265 73.915 Pundak kanan (235.0706, 580.6004, 641.4419) 188.682 235 46.318 Punggung (369.4499, 450.9158, 614.5163) 179.3453 215 35.655 Pundak kiri (518.0795, 551.1131, 620.3880) 191.2933 260 68.707 Siku tangan kiri (684.6623, 565.4999, 527.4563) 180.9497 260 79.05 Pergelangan tangan kiri (826.3303, 636.6630, 440.2280) Pinggang kanan (202.7477, 376.8270, 95.2649) 392.7828 410 17.217 Lutut kanan (204.2259, 315.0830, -292.6318) 339.4566 345 5.5434 Tumit kanan (193.4704, 280.5249, -630.1534) Pinggang kiri (551.2505, 370.5925, 74.5887) 353.4258 365 11.574 Lutut kiri (557.1198, 374.6901, -278.7646) 339.8925 355 15.108 Tumit kiri (583.4768, 338.4948,-615.6950)
Tabel 3. Data hasil rekontruksi dengan metode perpotongan dua persamaan garis
Titik Persedian Titik dalam koordinat 3D (x,y,z) Jarak hasil rekonstruksi (mm) Jarak sebenarnya (mm) Error (mm) Pergelangan tangan kanan (-264.2829, 653.1720, 440.0919) 227.3084 235 7.6916 Siku tangan kanan (-67.9696, 575.5040, 524.3408) 252.5308 265 12.469 Pundak kanan (165.2047, 540.4527, 614.7451) 221.7441 235 13.256 Punggung (363.5961, 639.4448, 611.3039) 204.1705 215 10.83 Pundak kiri (554.2424, 571.5324, 638.2762) 246.5084 260 13.492 Siku tangan kiri (787.7195, 557.3383, 560.4727) 254.7467 260 5.2533 Pergelangan tangan kiri (1015.300, 569.0010, 446.60) Pinggang kanan (198.8057, 478.3047, 102.8557) 401.1798 410 8.8202 Lutut kanan (210.4540, 535.1967, -294.0988) 334.1023 345 10.898 Tumit kanan (193.8617, 551.1617, -627.4067) Pinggang kiri (554.9803, 515.7688, 80.3192) 356.2286 365 8.7714 Lutut kiri (558.0051, 523.6964, -275.8083) 338.9546 355 16.045 Tumit kiri (584.8027, 565.2857, -611.1327)
Hasil rekontruksi yang telah dilakukan dengan dua metode perpotongan persamaan garis terhadap persamaan bidang dan metode perpotongan persamaan garis dengan persamaan garis didapat hasil yang berbeda. Untuk metode perpotongan garis dengan bidang didapatkan error kesalahan posisi koordinat x dan y lebih besar dari
pada dengan hasil x dan y dari metode perpotongan persamaan garis terhadap garis, namun untuk nilai z keduanya memiliki error yang kecil. Hasil rekonstruksi dan besarnya error jarak dapat dilihat pada table 2 dan table 3.
Hasil rekonstruksi figure tongkat pada gambar 15 terlihat membungkuk, sedangkan pada gambar 16 terlihat tegak, hal ini terjadi karena error jarak dari metode perpotongan persamaan garis terhadap bidang mencapai 79.05mm, sedangkan pada metode perpotongan persamaan garis terhadap persamman garis error jarak sekitar sepuluh sampai 16.045mm.
Gambar 15. Hasil rekonstruksi dengan perpotongan garis terhadap bidang.
Gambar 16. Hasil rekonstruksi dengan perpotongan persamaan garis.
5. KESIMPULAN
Hasil rekonstruksi dengan metode perpotongan persamaan garis terhadap persamaan garis lebih baik hasilnya dari pada hasil rekonstruksi dari perpotongan persamaan garis terhadap persamaan bidang.
6. DAFTAR PUSTAKA
[1] Aggarwal, J.K., dan Q. Cai. (1999), "Human Motion Analysis: A review", Computer Vision and Image Understanding, Vol. 73, no.3, pp. 428-440.
[2] Balint,Géza., Dezso, Zoltán., Hunka, Aniella., Lenti ,József ., dan Loványi, István. (2005), Motion Capture vs traditional medical examinations. International Conference: Sciences of Electronic, Technologies of information and Telecommunications ,Tunisia [3] Budiman, R., Bennamoun, M. and Huynh, D.Q.
(2005). Low Cost Motion Capture, Image and Vision Computing New Zealand, Dunedin, The University of Western Australia.
[4] Luo, Y., Perales, F., dan Villanueva, J. (1992), “An Automatic Rotoscopy System for Human Motion based on a Biomechanic Graphical Model,” Computers & Graphics 16(4).
[5] Moeslund, T.B. (1999), The Analysis-by-Synthesis Approach in Human Motion Capture: A Review, The 8th Danish conference on pattern recognition and image analysis, Copenhagen University, Denmark.
[6] Moeslund, T.B., A. Hilton, dan V. Kruger. (2006), “A Survey of Advances in Vision-based Human Motion Capture and Analysis”, Computer Vision and Image Understanding, 104, hal. 90-126. [7] Pollefeys, Marc,(2003). Visual 3D Modeling from
Images . Tutorial Note, Department of Computer Science, University of North Carolina, Chapel Hill, USA
[8] Shipley, T. F., dan Brumberg, J. S. (2005). Markerless Motion-capture for Point-light Displays. Biological Motion Project, Department of Psychology,Temple University, Philadelphia.