MAKALAH
Disusun untuk Memenuhi Salah Satu Tugas Wajib
Siswa Kelas XI SMA Kolese De Britto
Tahun Ajaran 2016/2017
Oleh :
Pius Akieko Putra XI IPA 1 / 22
SMA KOLESE DE BRITTO
YOGYAKARTA
vi
HALAMAN PERSETUJUAN... ii
PERNYATAAN KEASLIAN KARYA... iii
KATA PENGANTAR... iv
DAFTAR ISI... vi
ABSTRAKSI... x
BAB I PENDAHULUAN...1
A. Latar Belakang... 1
B. Rumusan Masalah... 2
C. Tujuan... 2
D. Manfaat... 3
E. Sistematika Penulisan... 3
BAB II LANDASAN TEORI...5
A. Istilah Dalam Mekanika Newtonian... 5
1. Jarak dan Perpindahan... 5
2. Kelajuandan Kecepatan... 5
vii
2. Gaya...11
a. Hukum I Newton...12
b. Hukum II Newton... 12
c. Hukum III Newton... 12
C. Gerak Melingkar... 13
1. Posisi Sudut... 13
2. Perpindahan Sudut... 13
3. Kecepatan Sudut... 14
4. Percepatan Sudut... 15
5. Torsi...16
6. Momen Inersia...19
7. Hubungan Torsi dengan Percepatan Sudut... 21
8. Energi Kinetik Rotasi... 22
D. Hubungan Gerak Linear dan Gerak Melingkar... 22
1. Hubungan Kecepatan Linear dan Kecepatan Sudut... 22
viii
1. Besaran... 25
2. Pengukuran... 25
a. Pengukuran Tunggal... 26
b. Pengukuran Berulang...26
BAB III METODE PENELITIAN... 28
A. Subjek Penelitian... 28
B. Objek Penelitian... 28
C. Variabel Penelitian... 28
D. Jenis Penelitian... 29
E. Teknik Pengumpulan Data... 29
1. Alat dan Bahan... 29
2. Langkah Kerja... 29
F. Teknik Analisis Data... 30
BAB IV PEMBAHASAN... 31
A. Data Hasil Percobaan... 31
ix
A. Kesimpulan... 43
B. Saran...43
DAFTAR PUSTAKA... 44
LAMPIRAN... 46
A. Data Hasil Percobaan... 46
B. Data Hasil Pengukuran Massa... 47
x
adalah alat transportasi, seperti mobil. Sekarang, karena mudahnya memiliki alat transportasi, orang-orang mulai mengubah alat transportasinya sesuai keinginannya, atau lazim disebut modifikasi, dan salah satu hal yang dimodifikasi adalah ukuran roda. Makalah ini berfokus pada pengaruh jari-jari roda (ukuran roda) terhadap waktu tempuh benda.
Data dalam makalah ini menggunakan hasil percobaan balok beroda dari akrilik yang bergerak di atas bidang miring berupa triplek yang waktunya dicatat setelah melewati jarak tertentu. Kemudian hasil tersebut dibandingkan dengan persamaan yang dibuat untuk menghitung waktu tempuh.
1 A. Latar Belakang
Roda menjadi bagian yang tidak terpisahkan dari kehidupan
sehari-hari. Mudah sekali ditemui hal-hal yang menggunakan roda sebagai
mekanisme kerjanya, seperti pada alat transportasi.
Sekarang, banyak masyarakat yang berkreasi dengan kendaraan
yang dimiliki, atau biasa disebut memodifikasi kendaraan. Mulai dari
mengubah tampilan dengan painting atau dengan sticker yang membuat
tampilan kendaraan berbeda dengan kendaraan awalnya, mengubah interior,
bahkan memodifikasi komponen-komponen kendaraan tersebut, salah
satunya bagian roda. Modifikasi roda cukup banyak dilakukan oleh
masyarakat, baik mengganti jenis roda, tampilan roda, sampai mengganti
ukuran roda.
Namun, masih sedikit masyarakat yang belum memahami hal yang
terjadi ketika ukuran roda dari sebuah kendaraan diubah. Secara
administratif, mengubah ukuran roda kendaraan membuat kendaraan
tersebut sudah tidak sesuai dengan SNI (Standar Nasional Indonesia), dan
dampak dari modifikasi ukuran roda pada kendaraan dapat pula dianalisis
secara fisika. Melalui analisis fisika, bisa diketahui secara nyata dampak
dari modifikasi roda kendaraan terhadap kendaraan itu sendiri.
Selain menganalisis dampak ukuran roda terhadap mekanisme
kendaraan, penelitian dilakukan sebagai pengenalan bagi penulis untuk
melakukan analisis fisika sebagai bekal penulis untuk menempuh
pendidikan di jurusan fisika, sesuai dengan latar belakang kegiatan
Penulisan Karya Ilmiah SMA Kolese De Britto yaitu melatih siswa untuk
terbiasa berpikir ilmiah dan menuliskannya secara terstruktur.
B. Rumusan Masalah
Dalam tulisan ini, pertanyaan yang menjadi acuan adalah :
Bagaimana pengaruh jari-jari roda terhadap waktu tempuh benda di bidang
miring ?
C. Tujuan
Penulisan Karya Ilmiah ini bertujuan untuk :
1. Melatih penulis untuk terbiasa berpikir ilmiah: mengolah ide dan
menuangkannya ke dalam bentuk tulisan berstruktur dan bersifat ilmiah.
2. Menumbuhkan budaya membaca buku-buku pengetahuan pada diri penulis.
3. Memberikan pengalaman bagi penulis untuk melakukan analisis mekanika.
4. Mengetahui pengaruh jari-jari roda terhadap waktu tempuh benda di bidang
D. Manfaat
Penulisan Karya Ilmiah ini memberi manfaat sebagai berikut :
1. Bagi Penulis :
a. Penulis memiliki pengalaman untuk menuangkan pikiran ke dalam
bentuk tulisan yang berstruktur dan bersifat ilmiah.
b. Penulis memiliki pengalaman melakukan analisis fisika sebagai
modal awal penulis untuk menempuh pendidikan di jurusan fisika.
2. Bagi Pembaca :
Pembaca dapat mengetahui pengaruh jari-jari roda terhadap waktu
tempuh benda pada jarak tertentu.
E. Sistematika Penulisan
Karya Ilmiah ini disusun sebagai berikut :
1. BAB I PENDAHULUAN
Pada bab I, terdapat penjelasan tentang :
a. Latar Belakang
b. Rumusan Masalah
c. Tujuan
d. Manfaat
e. Sistematika Penulisan
2. BAB II LANDASAN TEORI
Pada bab II, terdapat teori-teori dan persamaan-persamaan dari :
b. Gerak Lurus
c. Gerak Melingkar
d. Hubungan Gerak Lurus dan Gerak Melingkar
e. Hukum Kekekalan Energi Mekanik
f. Pengukuran
3. BAB III METODE PENELITIAN
Pada bab III, terdapat penjelasan tentang :
a. Subjek Penelitian
b. Objek Penelitian
c. Variabel Penelitian
d. Jenis Penelitian
e. Teknik Pengumpulan Data
f. Langkah Kerja
g. Teknik Analisis Data
4. BAB IV PEMBAHASAN
Pada bab IV, terdapat :
a. Data Hasil Percobaan
b. Penurunan Persamaan
c. Pembahasan
5. BAB V KESIMPULAN
Pada bab V, terdapat :
a. Kesimpulan
5
[1.1] A. Istilah Dalam Mekanika Newtonian
1. Jarak dan Perpindahan
Jarak adalah panjang lintasan yang ditempuh benda dalam
selang waktu tertentu.
Perpindahan suatu benda adalah perpindahan posisi dari
suatu benda dalam selang waktu tertentu.
Dalam gerak satu dimensi (gerak benda pada hanya satu
sumbu), perpindahan dapat ditulis :
∆𝑥 = 𝑥𝑏− 𝑥𝑎
Dimana :
∆𝑥 = Perpindahan
𝑥𝑎 = Posisi awal
𝑥𝑏 = Posisi akhir
2. Kelajuan dan Kecepatan
Dalam kehidupan sehari-hari, kecepatan dan kelajuan adalah
[1.2]
[1.3] antara kelajuan dan kecepatan.
Kelajuan adalah besaran skalar (hanya mempunyai
besar/nilai), sementara kecepatan adalah besaran vektor (memiliki
besar dan arah).
Kelajuan rata-rata sebuah benda dalam selang waktu tertentu
didefinisikan sebagai jarak tempuh total dibagi waktu untuk
menempuh jarak tersebut. Secara matematis dapat ditulis :
𝑣 =𝑑𝑡
Dimana :
𝑣 = Kelajuan rata-rata (𝑚𝑠−1) 𝑑 = Jarak tempuh total (m)
𝑡 = Waktu tempuh total (s)
Kecepatan rata-rata selama selang waktu tertentu adalah
perpindahan dibagi dengan selang waktu, atau secara matematis
dapat ditulis :
𝑣̅ = Δ𝑥Δ𝑡 = 𝑥𝑏𝑡 − 𝑥𝑎 𝑏− 𝑡𝑎 Dimana :
𝑣̅ = Kecepatan rata-rata (𝑚𝑠−1) ∆𝑥 = Perpindahan (m)
∆𝑡 = Selang waktu (s)
[1.4]
[1.5] 𝑥𝑏 = Posisi akhir (m)
𝑡𝑎 = Waktu awal (s) 𝑡𝑏 = Waktu akhir (s)
Kecepatan rata-rata tidak menjelaskan secara detil tentang
apa yang terjadi pada waktu tertentu. Sebagai contoh, saat
berkendara, mobil tidak selalu melaju dengan konstan. Ada kalanya
mobil melaju lebih cepat, lebih lambat, atau bahkan berhenti.
Kecepatan benda pada waktu tertentu disebut kecepatan sesaat.
Kecepatan sesaat adalah kecepatan rata-rata dengan selang
waktu mendekati nol, atau secara matematis dapat ditulis :
𝑣⃗ = lim∆𝑡→0∆𝑥∆𝑡
Dimana :
𝑣⃗ = Kecepatan linear sesaat (𝑚𝑠−1) ∆𝑥 = Perpindahan (m)
∆𝑡 = Selang waktu (s)
Kecepatan sesaat juga dapat ditentukan dengan menurnkan
posisi terhadap waktu, atau secara matematis dituliskan sebagai :
𝑣⃗ =𝑑∆𝑥𝑑𝑡
Dimana :
[1.6] 𝑡 = Waktu perpindahan (s)
3. Percepatan
Percepatan adalah perubahan kecepatan benda. Karena
kecepatan adalah besaran vektor (memiliki besar dan arah), maka
percepatan dapat berarti perubahan arah kecepatan maupun
perubahan besar kecepatan.
Percepatan rata-rata selama selang waktu tertentu adalah
perubahan kecepatan dibagi selang waktu, atau secara matematis
dapat ditulis :
𝑎𝑙̅ = ∆𝑣⃗∆𝑡 = 𝑣⃗⃗⃗⃗⃗ − 𝑣𝑡𝑏𝑏− 𝑡𝑎⃗⃗⃗⃗⃗𝑎
Dimana :
𝑎̅𝑙 = Percepatan linear rata-rata (𝑚𝑠−2) ∆𝑣⃗ = Perubahan kecepatan linear (𝑚𝑠−1) ∆𝑡 = Selang waktu (s)
𝑣⃗𝑎 = Kecepatan linear awal (𝑚𝑠−1) 𝑣⃗𝑏 = Kecepatan linear akhir (𝑚𝑠−1) 𝑡𝑎 = Waktu awal (s)
[2.1]
[2.2] [1.7] Percepatan sesaat adalah perubahan kecepatan dalam selang
waktu mendekati nol, atau secara matematis dapat ditulis :
𝑎𝑙
⃗⃗⃗⃗ = lim∆𝑡→0∆𝑣⃗∆𝑡
Dimana :
𝑎𝑙⃗⃗⃗⃗ = Percepatan linear sesaat (𝑚𝑠−2) ∆𝑣⃗ = Perubahan kecepatan (𝑚𝑠−1) ∆𝑡 = Selang waktu (s)
B. Gerak Lurus
1. Gerak Lurus Berubah Beraturan
Gerak lurus (dalam karya ilmiah ini akan disebut dengan
gerak linear) berubah beraturan adalah gerak suatu benda yang
mengalami percepatan tetap. Dalam GLBB, percepatan benda
selama bergerak adalah sama. Percepatan sesaat benda sama dengan
percepatan rata-rata benda, maka 𝑎̅𝑙 dapat diganti dengan 𝑎𝑙, sehingga persamaan [1.6] dapat ditulis :
𝑎𝑙= 𝑣𝑏⃗⃗⃗⃗⃗ − 𝑣𝑡 ⃗⃗⃗⃗⃗𝑎 𝑏− 𝑡𝑎
Jika 𝑡𝑎 = 0, 𝑡𝑏 = 𝑡, 𝑣⃗⃗⃗⃗⃗ = 𝑣0,𝑎 dan 𝑣𝑏⃗⃗⃗⃗⃗ = 𝑣𝑡, maka persamaan [2.1] dapat ditulis :
[2.4]
[2.5]
[2.6] [2.3] 𝑣𝑡 = 𝑣0+ 𝑎𝑙𝑡
Karena kecepatan benda bertambah ataupun berkurang
secara teratur, maka kecepatan rata-rata benda dapat diperolah dari
rata-rata kecepatan awal benda dan kecepatan akhir benda, atau
secara matematis dapat ditulis :
𝑣̅ = 𝑣0 + 𝑣2 𝑡
Menggunakan persamaan [1.2], dan mengganti d dengan ∆𝑥,
akan didapati persamaan :
∆𝑥 = 𝑣̅𝑡 = (𝑣0 + 𝑣𝑡2 ) 𝑡
∆𝑥 = 12(𝑣0+ 𝑣𝑡)𝑡
Dengan mensubstitusikan persamaan [2.3] ke persamaan
[2.5], dapat diperoleh :
∆𝑥 = 12 (𝑣𝑜+ 𝑣0 + 𝑎𝑙𝑡)𝑡
∆𝑥 = 𝑣0𝑡 +12 𝑎𝑙𝑡2
Apabila persamaan 𝑡 dari persamaan [2.2] kita substitusikan
ke persamaan [2.5], akan diperoleh :
[2.7] 𝑣𝑡2 = 𝑣02+ 2𝑎𝑙∆𝑥
Dimana :
∆𝑥 = Perpindahan (m)
𝑎𝑙 = Percepatan linear (𝑚𝑠−2) 𝑡 = Selang waktu (s)
𝑣0 = Kecepatan linear awal (𝑚𝑠−1) 𝑣𝑡 = Kecepatan linear akhir (𝑚𝑠−1)
2. Gaya
Dalam mekanika, semua aksi yang bertendensi mengubah
atau mempertahankan gerak suatu benda disebut gaya. Gaya
umumnya diimajinasikan / digambarkan sebagai suatu dorongan
atau tarikan pada benda. Gaya dapat diberikan secara terus menerus,
seperti saat seseorang mendorong meja. Gaya dapat pula diberikan
dalam selang waktu yang sangat singkat, seperti memukul bola tenis.
Gaya dibagi menjadi dua : gaya kontak (contact force) dan
gaya medan (field force). Mendorong meja, menarik pegas,
menendang bola, melempar koin, adalah contoh gaya kontak. Gaya
gravitasi, gaya magnet, adalah contoh gaya medan.
Pengembangan konsep gaya telah banyak dilakukan dari
[2.8]
[2.9]
[2.10] menyatakan hukumnya tentang gerak, yaitu Mekanika Newton,
yang terdiri dari :
a. Hukum I Newton
Hukum I Newton berbunyi :
“Jika resultan gaya pada suatu benda sama dengan nol, benda
yang mula-mula diam akan terus diam, sedangkan benda yang mula-mula bergerak akan terus bergerak dengan
kecepatan tetap.”
Secara matematis, Hukum I Newton dapat ditulis :
Σ𝐹 = 0
(untuk benda diam atau bergerak berubah beraturan)
b. Hukum II Newton
Hukum II Newton berbunyi :
“Percepatan yang dihasilkan oleh resultan gaya yang bekerja pada suatu benda berbanding lurus dengan resultan gaya, searah dengan resultan gaya, dan berbanding terbalik dengan
massa benda.”
Secara matematis, Hukum II Newton dapat ditulis :
𝑎⃗ = Σ𝐹⃗𝑚 𝑎𝑡𝑎𝑢 Σ𝐹⃗ = 𝑚𝑎⃗
c. Hukum III Newton
Hukum III Newton berbunyi :
“Untuk setiap aksi, terdapat suatu reaksi yang sama besar, tetapi berlawanan arah.”
Secara matematis, Hukum III Newton dapat ditulis ;
[3.1]
[3.2] C. Gerak Rotasi
1. Posisi Sudut
Sebuah partikel bergerak dengan lintasan sebuah lingkaran
berjari-jari r, telah bergerak di sepanjang lingkaran dengan jarak s. Posisi sudutnya
(relatif terhadap posisi awalnya) adalah 𝜃, dengan hubungan :
𝜃 =
𝑠
𝑟
Dimana :
𝜃 = Posisi sudut (rad)
𝑠 = Posisi di lintasan
𝑟 = Jarak partikel dengan poros
2 Perpindahan Sudut
Perpindahan sudut adalah perubahan posisi sudut, atau secara
matematis dapat dituliskan sebagai :
∆𝜃 = 𝜃𝑡− 𝜃0
Dimana :
∆𝜃 = Perpindahan sudut (rad)
𝜃0 = Posisi sudut awal (rad)
[3.3] 3. Kecepatan Sudut
Kecepatan sudut (rata-rata) adalah perpindahan sudut per
satuan waktu, atau dapat dituliskan sebagai :
𝜔̅ =∆𝜃∆𝑡 =𝜃𝑡𝑡𝑡− 𝜃− 𝑡00
Dimana :
𝜔̅ = Kecepatan sudut rata-rata (𝑟𝑎𝑑 𝑠−1)
∆𝜃 =Perpindahan sudut (rad)
∆𝑡 =Selang waktu (s)
𝜃0 =Posisi sudut awal (rad)
𝜃𝑡 =Posisi sudut akhir (rad)
𝑡0 =Waktu saat posisi sudut awal (s)
𝑡𝑡 =Waktu saat posisi sudut akhir (s)
Sama seperti kecepatan rata-rata gerak translasi, kecepatan
sudut rata-rata tidak dapat menjelaskan apa yang terjadi dengan
suatu partikel dengan akurat. Maka, digunakanlah pendekatan
kecepatan sudut sesaat (𝜔).
Kecepatan sudut sesaat adalah kecepatan sudut rata-rata
benda dengan selang waktu mendekat nol, atau secara matematis
[3.4]
Kecepatan sesaat sudut juga dapat ditentukan dengan
menurunkan posisi sudut terhadap waktu, atau secara matematis
dapat ditulis sebagai :
𝜔⃗⃗⃗ =𝑑𝜃𝑑𝑡
Percepatan sudut adalah besar perubahan kecepatan sudut
tiap satuan waktu..
Percepatan sudut rata-rata adalah besar perubahan kecepatan
sudut dalam selang waktu tertentu, atau secara matematis dapat
dituliskan sebagai :
𝑎𝑟
[3.7] Dimana :
𝑎𝑟
̅̅̅ = Percepatan sudut rata-rata (𝑟𝑎𝑑 𝑠−2)
∆𝜔 = Perubahan kecepatan sudut (𝑟𝑎𝑑 𝑠−1)
∆𝑡 = Selang waktu perubahan kecepatan sudut (s)
𝜔𝑡
Percepatan sudut sesaat adalah percepatan rata-rata dengan
selang waktu yang sangat kecil, atau secara matematis dapat ditulis
dengan :
[3.8]
[3.9]
[3.10]
[3.11] untuk menjelaskan gaya yang menyebabkan benda melakukan gerak
melingkar. Jika dalam gerak linear (lurus), digunakan pendekatan
gaya (𝐹⃗) sebagai penyebab gerak linear, dalam gerak rotasi,
digunakan pendekatan torsi (𝜏⃗) sebagai penyebab gerak rotasi.
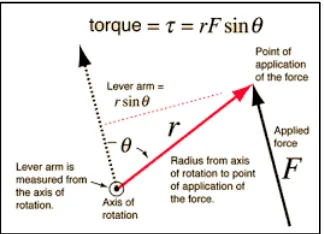
Besar torsi dapat dinyatakan sebagai hasil perkalian silang
(cross-product) antar jari-jari (𝑟⃗) dengan komponen gaya (𝐹⃗) yang
tegak lurus dengan arah vektor jari-jari, atau secara matematis dapat
ditulis sebagai :
𝜏⃗ = 𝐹⃗𝑟⃗
Apabila gaya (𝐹⃗) tidak tegak lurus dengan jari-jari (𝑟⃗), maka
harus ditentukan komponen gaya yang tegak lurus dengan jari-jari
(𝐹′⃗⃗⃗⃗), yang besarnya dapat ditentukan dengan persamaan :
𝐹′
⃗⃗⃗⃗ = 𝐹⃗𝑠𝑖𝑛𝜃
Dengan memasukkan persamaan [5.5] ke persamaan [5.4],
dapat didapatkan persamaan baru yang lebih umum untuk
menentukan nilai torsi, yaitu :
𝜏⃗ = 𝑟⃗𝐹⃗𝑠𝑖𝑛𝜃
Jarak poros P dengan garis gaya (𝐹⃗) disebut dengan lengan
momen(lever arm), dan dapat ditentukan menggunakan persamaan :
[3.12] Gambar 2.1 : Skema konsep torsi
Maka, dengan mensubstitusikan persamaan [3.11] ke
persamaan [3.10], memberikan satu lagi cara untuk menentukan
besarnya torsi, yaitu perkalian antara gaya dengan lengan momen,
atau secara matematis dapat ditulis sebagai :
𝜏⃗ = 𝐹⃗𝑑
Dimana :
𝜏⃗ = Torsi (Nm)
𝑟⃗ = Jari-jari (m)
𝐹⃗ = Gaya (N)
𝐹′
⃗⃗⃗⃗ = Komponen gaya tegak lurus dengan jari-jari (N)
𝜃 = Sudut antara gaya dengan jari-jari (rad atau ° )
[3.13]
[3.14] 6. Momen Inersia
Momen Inersia dapat mudah dipahami jika kita
menganalogikan persamaan dalam gerak linear dengan persamaan
gerak melingkar. Sebagai contoh, dalam menentukan besar energi
kinetik gerak linear, kita menggunakan persamaan :
𝐸𝐾𝐿𝑖𝑛𝑒𝑎𝑟 = 12 𝑚𝑣2
Dengan mensubstitusikan persamaan [4.1] dengan variabel
v, maka akan didapatkan persamaan energi kinetik gerak rotasi,
yaitu :
𝐸𝐾𝑅𝑜𝑡𝑎𝑠𝑖 =12 𝑚𝑟2𝜔2
Dimana :
𝑚 = Massa (m)
v = Kecepatan linear (𝑚𝑠−1) 𝜔 = Kecepatan sudut (𝑟𝑎𝑑 𝑠−1)
r = Jari-jari (m)
Dari persamaan [3.13] dan persamaan [3.14], dapat dilihat
[3.15]
momen inersia sebuah partikel dapat disebutkan sebagai :
𝐼 = 𝑚𝑟2
Sebuah benda tegar tersusun oleh banyak partikel yang
masing-masing memiliki massa m masing-masing dengan jarak r
masing-masing dari poros, maka momen inersia I dari benda tegar
dapat ditentukan dengan menjumlahkan momen inersia tiap partikel,
atau secara matematis dapat ditulis sebagai :
∑ 𝑚𝑖𝑟𝑖2 = 𝑚1𝑟12+ 𝑚2𝑟22+ 𝑚3𝑟32+ ⋯
Atau, jika massa benda tersebar secara merata, ditentukan dengan :
𝐼 = ∫ 𝑟2𝑑𝑚
Dimana,
r = Jarak partikel dengan poros
m = Massa partikel
Peran massa m dalam gerak linear sama dengan peran
momen inersia I dalam gerak rotasi. Jika massa m pada gerak linear
menyatakan ukuran kemampuan benda untuk mempertahankan
kecepatan linearnya, momen inersia benda pada gerak rotasi
menyatakan ukuran kemampuan benda untuk mempertahankan
[3.18] 7. Hubungan Torsi dengan Percepatan Sudut
Dengan mensubstitusikan 𝑎⃗⃗⃗⃗𝑙 di persamaan [4.2] ke dalam persamaan 𝑎⃗ pada persamaan [2.9], diperoleh persamaan berikut :
𝐹⃗ = 𝑚𝑟𝑎⃗⃗⃗⃗⃗𝑟
Kalikan kedua ruas dengan 𝑟⃗, maka akan diperoleh :
𝑟𝐹⃗ = 𝑚𝑟2𝑎𝑟⃗⃗⃗⃗⃗
Dengan mensubstitusikan persamaan [3.8] ke persamaan
[3.19], diperoleh persamaan :
𝜏⃗ = 𝐼𝑎𝑟⃗⃗⃗⃗⃗
Dengan mensubstitusikan 𝑎𝑟⃗⃗⃗⃗⃗ di persamaan [4.2] ke
persamaan [3.20], akan diperoleh persamaan :
[3.22] ]
[4.1] 8. Energi Kinetik Rotasi
Dengan mensubstitusikan 𝑚𝑟2 dari persamaan [3.15] ke persamaan [3.14], akan diperoleh persamaan :
𝐸𝐾𝑅𝑜𝑡𝑎𝑠𝑖 =12 𝐼𝜔2
Dimana,
𝑚 = Massa (kg)
𝑟 = Jari-jari (m)
𝜔 = Kecepatan sudut (𝑟𝑎𝑑 𝑠−1)
𝐼 = Momen inersia (𝑘𝑔𝑚2)
D. Hubungan Gerak Linear dan Gerak Melingkar
1. Hubungan Kecepatan Linear dan Kecepatan Sudut
Dengan persamaan [1.5] dan persamaan [3.5], kita dapat
merumuskan hubungan antara kecepatan sudut dan kecepatan
translasi, yaitu :
𝜔⃗⃗⃗ =𝑣⃗𝑟
Dimana :
𝜔⃗⃗⃗ = Kecepatan sudut (𝑟𝑎𝑑 𝑠−1)
[4.2]
[5.1] 𝑟 = Jarak partikel dengan poros (m)
2. Hubungan Percepatan Sudut dengan Percepatan Linear
Hubungan percepatan sudut dengan percepatan linear dapat
dituliskan secara matematis sebagai :
𝑎𝑙
E. Hukum Kekekalan Energi
Dalam memecahkan permasalah dinamika gerak rotasi dapat
digunakan Hk. II Newton mengenai gerak rotasi, yang dituliskan sebagai :
Σ𝜏⃗ = 𝐼𝑎⃗⃗⃗⃗⃗𝑟
Permasalahan dinamika rotasi dapat dipecahkan dengan
[5.2] Hukum Kekekalan Energi Mekanik :
Jika pada suatu sistem hanya bekerja gaya-gaya dalam yang bersifat konservatif, energi mekanik sistem pada posisi apa saja selalu tetap.
Energi kinetik translasi dihitung berdasarkan anggapan bahwa
benda adalah suatu partikel yang kelajuan linearnya sama dengan kelajuan
pusat massa. Energi kinetik rotasi dihitung berdasarkan anggapan bahwa
benda tegar berotasi terhadap poros yang melalui pusat massa.
Apabila benda bergerak menggelinding, terjadi gerak translasi dan
gerak rotasi secara bersamaan. Maka, energi kinetik sistem adalah jumlah
energi kinetik translasi dan energi kinetik rotasi, atau secara matematis
dapat ditulis sebagai :
𝐸𝐾 = 𝐸𝐾𝑇𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖+ 𝐸𝐾𝑅𝑜𝑡𝑎𝑠𝑖
𝐸𝐾 =12 𝑚𝑣2+1 2 𝐼𝜔2
Dimana :
𝑚 = Massa (kg)
𝑣 = Kecepatan linear (𝑚𝑠−1)
𝐼 = Momen inersia (𝑘𝑔𝑚2)
[5.3] Maka, pada sebuah sistem yang konservatif, pada benda yang
menggelinding berlaku hukum kekekalan energi mekanik, yang dapat
ditulis sebagai :
𝐸𝑀𝑎 = 𝐸𝑀𝑏
Dimana,
𝐸𝑀𝑎 = Energi mekanik awal
𝐸𝑀𝑏 = Energi mekanik akhir
F. Pengukuran
1. Besaran
Besaran adalah segala sesuatu yang dapat diukur, dihitung, dapat
dinyatakan dengan angka, dan memiliki satuan. Dalam ilmu fisika, ada 7
besaran pokok yang dikenal, yaitu panjang [L], massa [M], waktu [T], suhu
[𝜃], kuat arus [I], intensitas cahaya [J], dan jumlah molekul [N]. Ketujuh
besaran pokok tersebut dapat diturunkan menjadi besaran-besaran turunan
seperti kecepatan [𝐿𝑇−1].
2. Pengukuran
Pengukuran adalah suatu kegiatan membandingkan suatu besaran
dengan besaran lain yang ditetapkan sebagai standar satuan. Sebagai contoh,
saat kita mengukur panjang sebuah pensil, kita sedang membandingkan
[6.1] Hasil pengukuran suatu besaran dilaporkan sebagai
𝑥 = 𝑥0± ∆𝑥
Dimana,
𝑥 = Nilai pendekatan terhadap 𝑥0
𝑥0 = Nilai benar pengukuran
∆𝑥 = Ketidakpastian pengukuran
a. Pengukuran Tunggal
Pengukuran tunggal adalah kegiatan pengukuran yang
dilakukan hanya dengan satu kali pengukuran. Adapun
ketidakpastian dari pengukuran berulang adalah :
∆𝑥 =12 𝑠𝑘𝑎𝑙𝑎 𝑡𝑒𝑟𝑘𝑒𝑐𝑖𝑙
b. Pengukuran Berulang
Pengukuran berulang adalah kegiatan pengukuran yang
dilakukan berulang-ulang. Pengukuran berulang dilakukan saat
pengukuran tunggal dirasa tidak mampu memberi hasil pengukuran
yang akurat.
Misalkan suatu besaran fisika diukus sebanyak N kali dengan
[6.3] [6.2] 𝑥1, 𝑥2, 𝑥3, … , 𝑥𝑁 (disebut sebagai sampel), nilai terbaik sebagai
pengganti nilai benar 𝑥0 adalah nilai rata-rata sampel (𝑥̅) yang didapatkan melalui :
𝑥̅ = Σ𝑥𝑁 =𝑖 𝑥1, 𝑥2, 𝑥𝑁3, … , 𝑥𝑁
Dimana,
𝑥̅ = Rata-rata sampel
𝑁 = Banyak pengukuran
Sementara, nilai ketidakpastian dari pengukuran berulang
dapat dinyatakan oleh simpangan baku nilai rata-rata sampel, yang
secara matematis dapat ditulis sebagai :
∆𝑥 = 𝑆𝑥̅= 𝑁1√𝑁Σ𝑥𝑖
2− (Σ𝑥𝑖)2 𝑁 − 1
Dimana,
∆𝑥 = Ketidakpastian pengukuran berulang
𝑆𝑥̅ = Simbangan baku nilai rata-rata sampel
𝑁 = Banyak pengukuran
28 A. Subjek Penelitian
Subjek yang digunakan dalam penelitian ini adalah sebuah balok
beroda dan 5 set roda dengan jari-jari yang berbeda-beda, yang dapat dilepas
dan dipasang di balok beroda tersebut.
B. Objek Penelitian
Objek yang diteliti adalah waktu yang dibutuhkan oleh balok beroda
dalam menempuh jarak tertentu ketika dibiarkan melaju di bidang miring
dengan sudut tertentu
C. Variabel Penelitian
a. Variabel bebas : 4 ukuran jari-jari roda (2 cm, 2,5 cm, 3 cm,
3,5 cm)
b. Variabel terikat : Waktu tempuh balok beroda.
c. Variabel kontrol : Sudut kemiringan bidang miring (𝜃), panjang
lintasan (s), koefisien gesek (𝜇𝑘 𝑑𝑎𝑛 𝜇𝑠) ,
D. Jenis Penelitian
Penelitian yang dilakukan adalah penelitian eksperimental.
E. Teknik Pengumpulan Data
1. Alat dan Bahan
Dalam penelitian ini, digunakan alat dan bahan yaitu :
a. Balok beroda
b. 4 set ukuran jari-jari roda (2 cm, 2,5 cm, 3 cm, 3,5 cm).
c. Papan triplek
d. Mistar
e. Stopwatch
f. Neraca Ohaus
f. Alat tulis
2. Langkah kerja
Eksperimen dilakukan dengan langkah kerja sebagai berikut :
a. Mempersiapkan balok beroda dan keempat set roda
b. Mempersiapkan lintasan berupa bidang miring dengan bahan
papan triplek.
c. Menandai garis start dan finish dengan jarak 1,5 m dengan
d. Memasang set roda berjari-jari 2 cm ke balok.
e. Meletakkan balok dengan roda berjari-jari 2 cm di atas bidang
mirng dengan kemiringan 𝜃 = 15° setinggi 0,55 meter dari
lantai.
f. Melepaskan balok beroda sehingga balok beroda bergerak di
atas bidang miring. (Tidak memberikan dorongan atau tarikan
tambahan).
g. Mencatat waktu yang dibutuhkan oleh balok beroda untuk
bergerak dari start ke finish dalam tabel sebagai berikut :
NO JARI-JARI
Waktu Pada Percobaan ke – (s)
1 2 3 4 5 6 7 8 9 10
1 2 cm
2 2,5 cm
3 3 cm
4 3,5 cm
h. Mengulangi langkah d) dengan memasang set roda dengan
diameter yang lain.
i. Menganalisis data yang didapatkan.
F. Teknik Analisis Data
Analisis untuk menjawab rumusan masalah akan menggunakan data
yang didapatkan dari eksperimen dan melakukan pembuktian melalui
31
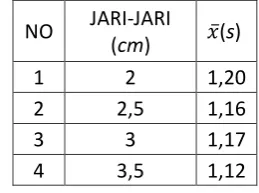
Tabel 4.1 : Data Hasil Percobaan
Tabel 4.2 : Hasil Perhitungan Rerata Data A. Data Hasil Percobaan
Percobaan dilakukan di rumah penulis pada tanggal 23 Januari 2017.
Dari percobaan tersebut, didapatkan hasil sebagai berikut :
Karena data di atas didapatkan dari pengukuran berulang, maka nilai
hasil pengukuran yang dianggap paling benar adalah rerata hasil
pengukuran (𝑥̅) yang didapatkan dengan persamaan [6.2] :
𝑥̅ =Σ𝑥𝑛𝑖
Berikut rerata waktu dari percobaan masing-masing jari-jari roda :
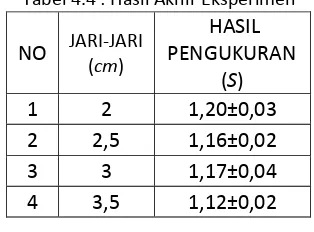
Tabel 4.3 : Hasil Perhitungan Keidakpastian Pengukuran
Tabel 4.4 : Hasil Akhir Eksperimen
Sedangkan ketidakpastian pengukuran berulang (∆𝑥) didapatkan
dari nilai simpangan baku rata-rata hasil pengukuran berulang, yang
didapatkan dengan persamaan [6.3] :
∆𝑥 =𝑁1√𝑁Σ𝑥𝑖2𝑁 − 1− (Σ𝑥𝑖)2
Dengan menggunakan rumus di atas, didapatkan ketidakpastian
dari data hasil pengukuran sebagai berikut :
NO JARI-JARI
Maka, berdasarkan perhitungan rerata data hasil percobaan dan
perhitungan ketidakpastiannya, data hasil percobaan yang dilakukan adalah
sebagai berikut :
Tabel 4.5 : Massa Alat Percobaan
Penulis juga mengukur massa dari alat yang digunakan, dan
didapatkan data sebagai berikut :
NO BENDA MASSA (kg)
1 Badan 0,3240
2 Roda 2 cm 0,0071 0,0071 0,0072 0,0073 3 Roda 2,5 cm 0,0118 0,0120 0,0120 0,0119 4 Roda 3 cm 0,0163 0,0170 0,0169 0,0168 5 Roda 3,5 cm 0,0222 0,0222 0,0220 0,0228
Pengukuran massa dilakukan karena ada persamaan yang diturunkan pada
sub-bab B. Data waktu tempuh hasil percobaan pada tabel 4.4 dan massa
benda (balok beroda) pada tabel 4.5 akan dipakai dalam bagian pembahasan
pada sub-bab C.
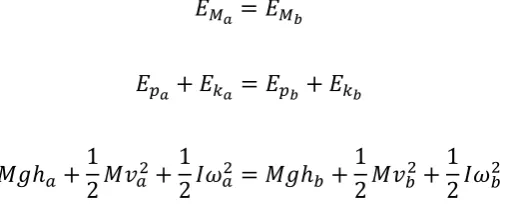
B. Penurunan Persamaan
Pendekatan rumus untuk waktu tempuh benda (balok beroda) di
bidang miring dapat diturunkan dengan hukum kekekalan energi mekanik
di persamaan [5.3] sebagai berikut :
𝐸𝑀𝑎 = 𝐸𝑀𝑏
𝐸𝑝𝑎 + 𝐸𝑘𝑎 = 𝐸𝑝𝑏+ 𝐸𝑘𝑏
𝑀𝑔ℎ𝑎+12 𝑀𝑣𝑎2+12 𝐼𝜔𝑎2 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+12 𝐼𝜔𝑏2
Karena keadaan awal benda diam (𝑣𝑎 = 0), maka :
[7.1] [A]
[B] Karena ada empat roda yang berputar dengan kecepatan sudut sama, maka:
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+2 (𝐼1 1+ 𝐼2+ 𝐼3+ 𝐼4)𝜔𝑏2
Karena jari-jari keempat roda sama, maka dapat dituliskan :
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+12 (𝑚1 + 𝑚2+ 𝑚3+ 𝑚4)𝑘𝑟2𝜔𝑏2
Massa tiap roda adalah sama, dan roda adalah sebuah silinder pejal(𝑘 =1 2),
dapat dituliskan :
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+14 𝑚𝑟2𝜔𝑏2
Dengan menguraikan 𝜔𝑏2 menggunakan persamaan [4.1], maka diperoleh :
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+14 𝑚𝑟2𝑣𝑏 2
𝑟2
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+14 𝑚𝑣𝑏2
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+ (12 𝑀 +14 𝑚) 𝑣𝑏2
Perlu diperhatikan bahwa variabel M adalah massa benda yang bergerak
translasi dan variabel m adalah massa benda yang memengaruhi energi pada
[7.2]
[7.3] Pada persamaan [2.7], dinyatakan bahwa :
𝑣𝑡2 = 𝑣02+ 2𝑎𝑙∆𝑥
Karena 𝑣0 = 0, persamaan diatas dapat disederhanakan menjadi :
𝑣𝑡2 = 2𝑎𝑙∆𝑥
Karena kita tidak memiliki data nilai 𝑎𝑙, maka variabel ini harus disubstitusi
dengan variabel lain yang diketahui dalam percobaan ini. Hal ini dapat
dilakukan dengan menggunakan persamaan [2.6] :
∆𝑥 = 𝑣0𝑡 +12 𝑎𝑙𝑡2
Persamaan ini digunakan karena hanya nilai dari variabel 𝑎𝑙 yang tidak
diketahui, dan juga memunculkan variabel t yang menjadi fokus pada
percobaan ini.
Karena 𝑣0 = 0, maka :
∆𝑥 = 12 𝑎𝑙𝑡2
𝑎𝑙 = 2∆𝑥𝑡2
Dengan mensubstitusikan persamaan [7.3] ke persamaan [7.2], akan
didapatkan persamaan :
[7.4]
Dengan memperhatikan konteks peristiwa, dapat diketahui bahwa :
𝑣𝑏2 = 𝑣𝑡2
Sehingga, jika persamaan [7.4] disubstitusikan ke persamaan [7.1], akan
didapatkan persamaan :
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+ (12 𝑀 +14 𝑚)4𝑠 2
𝑡2
Dan nilai t dapat dicari dengan hasil substitusi persamaan [7.4] ke
persamaan [7.1], dengan rincian sebagai berikut :
[7.5]
𝑡 = 2𝑠√(12𝑀 + 1 4 𝑚) 𝑀𝑔(ℎ𝑎− ℎ𝑏)
Dimana,
𝑡 = Waktu tempuh benda di bidang miring (s)
𝑠 = Jarak tempuh benda di bidang miring dalam waktu t (m)
𝑀 = Massa benda yang memengaruhi energi kinetik translasi (kg)
𝑚 = Massa benda yang memengaruhi energi kinetik rotasi (kg)
𝑔 = Percepatan gravitasi (𝑚 𝑠2)
ℎ𝑎 = Ketinggian benda mula-mula (m)
ℎ𝑏 = Ketinggian benda akhir (m)
C. Pembahasaan
Jika diperhatikan persamaan [7.5] :
𝑡 = 2𝑠√(12𝑀 + 1 4 𝑚) 𝑀𝑔(ℎ𝑎− ℎ𝑏)
Variabel 𝑀 pada persamaan [7.5] adalah massa yang memengaruhi
energi kinetik translasi. Karena badan alat dan semua rodanya mengalami
Variabel 𝑚 pada persamaan [7.5] adalah massa yang memengaruhi
energi kinetik rotasi. Karena hanya keempat roda yang mengalami gerak
rotasi, maka 𝑚 adalah jumlah massa keempat roda.
Pada persamaan [7.5], 𝑀𝑔(ℎ𝑎 − ℎ𝑏) adalah selisih energi potensial
dari alat. Unsur massa yang memengaruhi besar energi potensial alat adalah
variabel 𝑀. Hal ini karena energi potensial alat adalah energi potensial yang
dimiliki oleh badan sekaligus keempat roda yang terpasang pada alat.
Pada saat percobaan, ternyata gerakan dari balok beroda tidaklah
lurus, tetapi berbelok ke arah kiri. Hal ini disebabkan karena kerapatan
karet-karet yang membuat roda tetap berputar di tempat pada
masing-masing roda tidak bisa disamakan. Berbeloknya balok beroda ke arah kiri
menandakan bahwa roda-roda di sebelah kiri balok berputar lebih lambat
daripada roda-roda di bagian kanan balok.
Kesalahan ini pastilah memengaruhi hasil penelitian ini. Namun,
karena setiap roda yang dipasang pada balok menghasilkan arah gerak yang
sama (berbelok ke arah kiri) dengan sudut belokan yang sama, maka penulis
menganggap hasil percobaan ini tetap valid, karena tiap ukuran roda
mengalami hal yang sama (belokan yang sama, yang berarti jarak tempuh
yang sama).
Dengan data-data yang ada, dan mengandaikan besar 𝑔 = 9,8 𝑚 𝑠2
dan 𝑠 = 1,7 𝑚, maka waktu tempuh alat di bidang miring menurut
Tabel 4.6 : Waktu Tempuh Berdasarkan Persamaan [7.5]
Tabel 4.7 : Perbandingan Hasil Eksperimen dan Hasil Perhitungan
NO JARI-JARI
Untuk mempermudah analisis, berikut adalah tabel perbandingan
antara hasil eksperimen dengan hasil perhitungan :
NO JARI-JARI
eksperimen sangatlah berbeda dengan waktu tempuh hasil perhitungan.
Waktu tempuh benda pada bidang miring menurut hasil eksperimen lebih
lama daripada waktu tempuh yang didapatkan menurut hasil perhitungan.
Meskipun waktu tempuh yang didapatkan berbeda antara hasil
perhitungan dengan hasil persamaan, tetapi dari hasil yang didapatkan,
dapat dilihat bahwa tidak terjadi perubahan yang signifikan. Waktu tempuh
dari roda berjari-jari 2 cm dan 3,5 cm (hampir dua kali lebih besar) tidaklah
jauh berbeda. Perbedaan 0,08 𝑠dari hasil pengukuran yang dianggap benar
[A]
[B] mendapat toleransi ketidakpastian sehingga mempunyai nilai selisih yang
paling kecil) sangat mungkin terjadi karena keterbatasan pengamat pada
eksperimen dilakukan.
Dengan memperhatikan persamaan [7.5], dapat diketahui bahwa
sebab perbedaan 0,01 𝑠 hasil perhitungan adalah perbedaan massa roda. Hal
ini menunjukkan bahwa perbedaan waktu tempuh bukanlah karena
perbedaan ukuran roda, tetapi karena perbedaan massa roda.
Dalam uraian penurunan persamaan (Bab IV Sub-bab B),
sebenarnya dapat terlihat bahwa pengaruh jari-jari roda terhadap persamaan
akan hilang. Perhatikan persamaan [A] dan persamaan [B] :
𝑀𝑔ℎ𝑎 = 𝑀𝑔ℎ𝑏+12 𝑀𝑣𝑏2+14 𝑚𝑟2𝑣𝑏
persamaan [B], pengaruh dari jari-jari sudah tidak ada. Ini merupakan bukti
lain, bahwa jari-jari roda tidak berpengaruh pada waktu tempuh benda di
bidang miring.
Perbedaan dari waktu tempuh benda berdasarkan hasil eksperimen
disebabkan oleh alasan yang mendasar. Hukum kekekalan energi mekanik
yang menjadi dasar penurunan persamaan [7.5] hanya berlaku apabila hanya
gaya yang bekerja hanyalah gaya internal. Apabila ada gaya eksternal yang
bekerja, hukum kekekalan energi mekanik tidak berlaku.
Pada percobaan, tentu saja ada gaya eksternal yang bekerja pada
benda, diantaranya : gaya gesek antara roda dengan porosnya, gaya gesek
antara roda dengan karet pemasang roda, dan gaya gesek antara roda dengan
bidang. Gaya-gaya tersebut adalah gaya eksternal yang menyebabkan
hukum kekekalan energi mekanik tidak lagi berlaku.
Jari-jari roda yang lebih besar berarti dibutuhkan energi yang lebih
besar untuk menggerakan roda tersebut. Jari-jari yang lebih besar sekaligus
membawa massa yang lebih besar, sehingga energi potensial yang dimiliki
oleh benda juga semakin besar. Sehingga, pengaruh jari-jari roda terhadap
kebutuhan energi sekaligus ketersediaan energi untuk menggerakkan roda
akan saling mengimbangi.
Roda dengan jari-jari yang lebih besar akan memiliki percepatan
sudut yang lebih kecil dibandingkan dengan jari-jari roda yang lebih kecil
(dalam hal ini dianggap gaya berat yang dialami alat sama besar untuk tiap
roda, karena selisih massa yang sangat kecil). Namun, jarak tempuh yang
dapat diraih oleh satu putaran roda yang berjari-jari lebih besar lebih jauh
roda terhadap percepatan sudut roda sekaligus jarak yang ditempuh roda
dalam satu putaran akan saling mengimbangi.
Pada Bab 1 Sub-bab 1 (Latar Belakang), disebutkan bahwa salah
satu implementasi dari pengetahuan pengaruh jari-jari roda terhadap gerak
suatu benda adalah pada kasus modifikasi roda mobil. Dengan energi yang
sama, mesin mobil akan lebih mudah memutar as yang dipasangkan roda
dengan jari-jari yang lebih kecil, dan akan menyebabkan lebih banyaknya
putaran roda, dengan jarak tempuh tiap putaran lebih pendek daripada roda
berjari-jari besar. Namun dengan energi yang sama, mesin mobil akan lebih
sulit memutar as yang dipasangkan roda dengan jari-jari yang lebih besar,
dan akan menyebabkan lebih sedikitnya putaran roda, dengan jarak tempuh
tiap putaran lebih jauh daripada roda berjari-jari kecil.
Namun, dari hasil penelitian ini, tidak dapat disimpulkan bahwa
pengubahan ukuran jari-jari roda tidak akan memengaruhi efisiensi
kendaraan bermotor, karena mekanisme kendaraan bermotor yang sangatlah
berbeda dengan mekanisme dari alat percobaan. Dibutuhkan analisis yang
lebih jauh tentang hubungan jari-jari roda terhadap mekanisme kendaraan
bermotor dari segi ilmu permesinan untuk menjawab pertanyaan tersebut.
Penelitian ini hanya menunjukkan bahwa jari-jari roda dari sebuah sistem
gerak sederhana tidak akan memengaruhi waktu tempuh benda di bidang
43 BAB V
KESIMPULAN
A. Kesimpulan
Berdasarkan hasil penelitian, dapat disimpulkan bahwa jari-jari
roda tidak berpengaruh pada waktu tempuh benda di bidang miring.
B. Saran
Dari penelitian yang telah dilakukan, muncul beberapa saran untuk
penelitian selanjutnya :
1. Menggunakan alat-alat yang lebih kredibel untuk melakukan
eksprerimen, sehingga mendapatkan data yang lebih akurat.
2. Memperbanyak jumlah sampel agar data yang dimiliki semakin
valid.
3. Menurunkan persamaan yang lebih presisi dan akurat
4. Mengkaitkan mekanika sederhana dengan ilmu permesinan untuk
44
(http://www.physicsclassroom.com/class/energy/Lesson-1/Mechanical-Energy diakses tanggal 21 Desember 2016 pukul 12.30)
Anonim. “Conservation of Energy”, (Online),
(http://physics.bu.edu/~duffy/py105/EnergyConservation.html diakses
tanggal 21 Desember 2016 pukul 13.00)
Anonim. “Circular Motion and Rotation”, (Online),
(http://hyperphysics.phy-astr.gsu.edu/hbase/circ.html diakses tanggal 21
Desember 2016 pukul 15.00)
Anonim. “What is ‘rotational motion’ ?”, (Online),
(https://www.reference.com/science/rotational-motion-87dda412d1ee06f4
diakses tanggal 22 Desember 2016 pukul 12.00)
Anonim. “Circular, Satelite, and Rotational Motion”, (Online),
(http://www.physicsclassroom.com/mmedia/circmot diakses tanggal 22
Anonim. “Uniform Circular Motion”, (Online),
(http://www.physicsclassroom.com/mmedia/circmot/ucm.cfm diakses
tanggal 22 Desember 2016 pukul 16.00)
Anonim. “Gerak Melingkar”, (Online),
(http://fisikastudycenter.com/fisika-x-sma/3-gerak-melingkar diakses
tanggal 22 Desember 2016 pukul 19.00)
Anonim. “Gerak Melingkar, Pengertian Dan Besaran Pada Gerak Melingkar”,
(Online),
(http://fisikazone.com/gerak-melingkar/ diakses pada tanggal 23 Desember
2016 pukul 12.00)
Faughn, Jerry S., Serway, Raymond A., Vuille, Chris, Bennett, Charles A. 2006.
Serway’s College Physics. Belmont : Thomson Brooks/Cole
Kanginan, Marthen. 2002. FISIKA untuk SMA Kelas X. Jakarta : Penerbit Erlangga
Kanginan, Marthen. 2013. FISIKA untuk SMA/MA Kelas X. Jakarta : Penerbit
Erlangga
Kanginan, Marthen. 2013. FISIKA untuk SMA/MA Kelas XI. Jakarta : Penerbit
![Tabel 4.6 : Waktu Tempuh Berdasarkan Persamaan [7.5]](https://thumb-ap.123doks.com/thumbv2/123dok/3941904.1885324/45.595.287.418.148.242/tabel-waktu-tempuh-berdasarkan-persamaan.webp)
