BAB III
PERANCANGAN ALAT
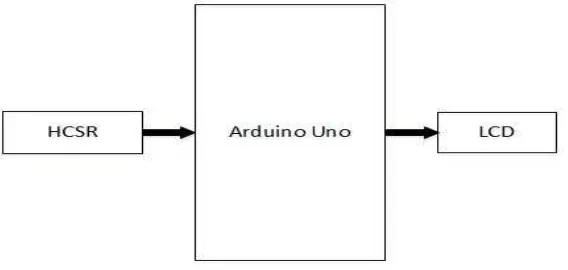
3.1 Perancangan Blok Diagram Sistem
Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih
komponen yang memiliki kesatuan kerja tersendiri,dan setiap blok komponen
mempengaruhi komponen yang lainnya.
Adapun diagram blok dari sistem rangkaian alat ukur kedalaman air
berbasis arduino uno seperti yang ada pada gambar di bawah ini :
Gambar 3.1 Blok Diagram
Berdasarkan blok diagram pada gambar 3.1 menunjukkan bahwa
komponen-komponen yang terdapat pada system ini adalah HCSR pada sisi input,
Pada sisi input, HCSR akan melakukan pengukuran terhadap jarak dengan
memantulkan gelombang ultrasonik ke benda yang akan diukur jaraknya.
Gelombang akan terpantul untuk diterima lagi oleh HCSR ultrasonic. Dengan
begitu, HCSR-04 dapat mengukur jarak terhadap media pantulnya.Pada
perancangan ini, data jarak yang diambil merupakan data diameter bola. Data
diameter akan diolah untuk mendapatkan data luas. Data-data tersebut akan
ditampilkan pada LCD 16x2 melalui Arduino Uno.
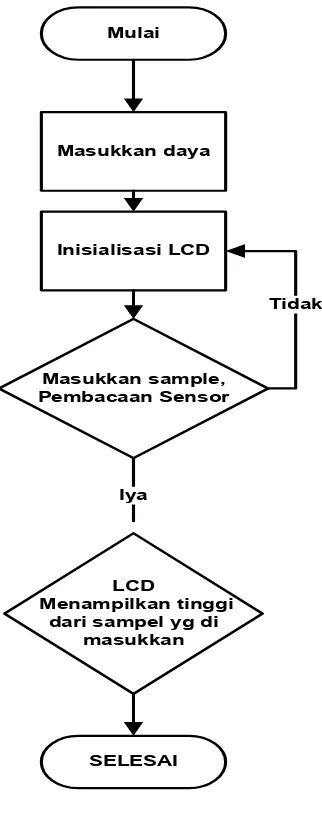
3.2 Flowchart Program
Mulai
Menampilkan tinggi dari sampel yg di
masukkan
Tidak
Iya
SELESAI
3.3 Pengujian Rangkaian Arduino Uno ke HCSR-04
3.4 Rangkaian Seluruhnya
BAB IV
DATA PENGUJIAN DAN ANALISA PENGUJIAN
Padababini, akan di
bahastentangpengujianalatberdasarkanperancangandarisistem yangtelahdibuat.
keseluruhandenganmemberikanmasukanuntuk sensor dan di olah Arduino Uno.
4.1 Pengujian Sensor Ultrasonik HCSR04
Pengujian ini bertujuan untuk mengetahui apakah semua komponen
bekerja dengan baik atau tidak rusak. Kemudian menguji rangkaian power supply
terlebih dahulu, baru kemudian menguji rangkaian utama. Hal itu dikarenakan bila
terjadi kesalahan maka kita dapat mengetahui bagian mana yang rusak tanpa harus
menebak-nebak kesalahan yang ada.
4.2 Pengujian LCD
Padatahapinidilakukanpercobaanuntukmengaktifkan LCD sistem.Pengaktifan
4.2.1 Contoh Tampilan LCD
Gambar 4.2.1 contoh gambar tampilan LCD
4.3 Pemrograman
#include <NewPing.h>
#include <LiquidCrystal.h>
#define TRIGGER_PIN A0 // Arduino pin tied to trigger pin on the ultrasonic
sensor.
#define ECHO_PIN A1 // Arduino pin tied to echo pin on the ultrasonic
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in
centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing
setup of pins and maximum distance.
LiquidCrystal lcd(13,12, 11,10,9,8,7);
void setup() {
Serial.begin(9600); // Open serial monitor at 115200 baud to see ping results.
unsigned int HCSR = sonar.ping(); // Send ping, get ping time in microseconds
(uS).
int cm=(HCSR / US_ROUNDTRIP_CM); // Convert ping time to distance in cm
and print result (0 = outside set distance range)
int tinggi= 17-cm;
lcd.setCursor(0, 0);
lcd.print("TINGGI AIR");
lcd.setCursor(0, 1);
lcd.print(tinggi);
lcd.print("cm");
delay(200);
lcd.clear();
4.4Data Percobaan
4.4.1 Tabel Percobaan
Data tampilan pada LCD Diukur dengan penggaris
2 cm 1,6 cm
• Nilai rata rata dari tampilan LCD
= 2+3+4+5+7+8+9 7
= 5,42 cm
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah dilakukan pengujian hasil perancangan alat ukur sensor jarak berbasis
Arduino Uno dengan sensor Ultrasonik HCSR04,dapat diambil beberapa
kesimpulan:
1. Berdasarkan alat ukur kedalaman air dengan menggunakan sensor
ultrasonik akan melakukan pengukuran terhadap jarak dengan
memantulkan gelombang ultrasonik ke benda yang akan diukur jaraknya.
Gelombang akan terpantul untuk diterima lagi oleh HCSR
ultrasonic.Dengan begitu, sensor dapat mengukur jarak terhadap media
pantulnya
2. Dari hasil percobaanalat tersebut bahwa rata-ratapersen kesalahan (%) dari
5.2 Saran
Beberapatambahan yang diperlukandalammeningkatkankemampuanalatiniadalah:
1. Sebaiknya rangkaian yang digunakan menghasilkan nilai yang
mendekati nilai aslinya,dan sebaiknya rangkaian alat ini dikemas dalam
bentuk yang lebih rapi
2. Denganbeberapapengembangandanpenyempurnaansystemdarialatiniaka